Изобретение относится к бурению скважин, а именно к устройствам для определения положения ствола скважины, например, при наклонно-направленном бурении.
Целью изобретения является повышение точности определения направления ствола скважин.
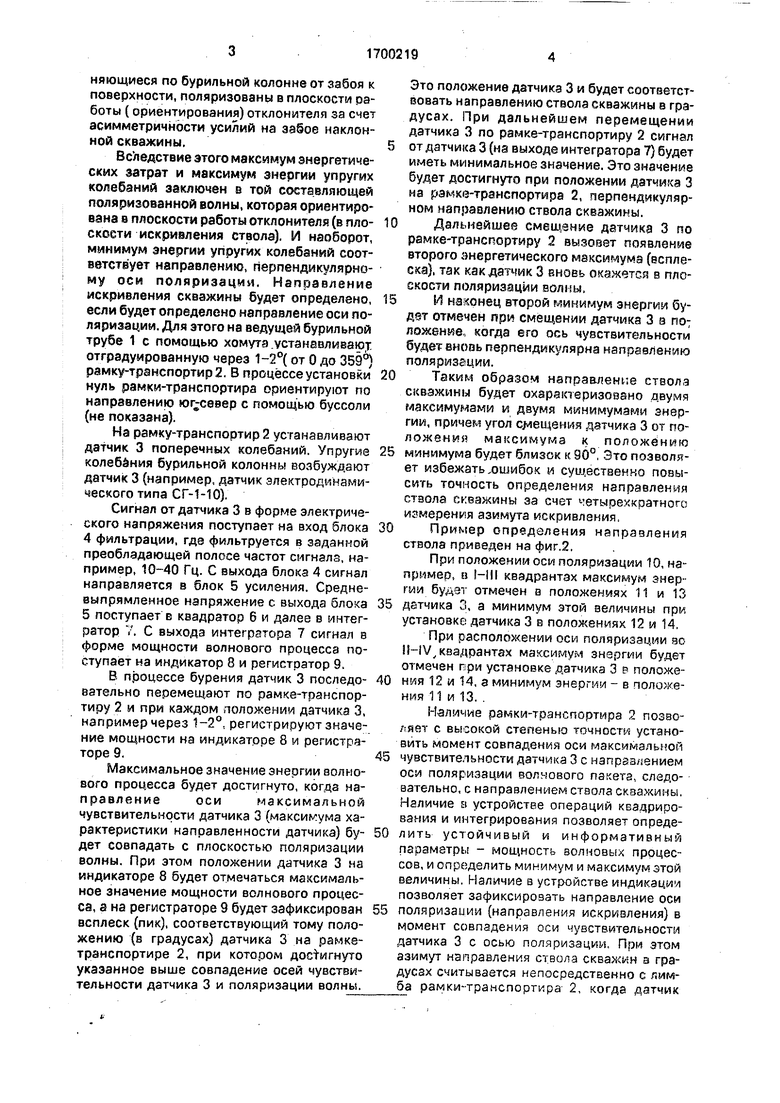
На фиг.1 представлена структурная схема устройства, на фиг 2 - иллюстрация процесса определения направления.
Устройство содержит установленную на ведущей бурильной трубе 1 рамку-транспортир 2 с датчиком 3 поперечных колебаний. Датчик 3 соединен с блоком 4 фильтрации, выход которого подключен через последовательно соединенные блок 5 усиления и квадратор 6 к входу интегратора 7, первый и второй выходы которого соединены соответственно с индикатором 8 и регистратором 9
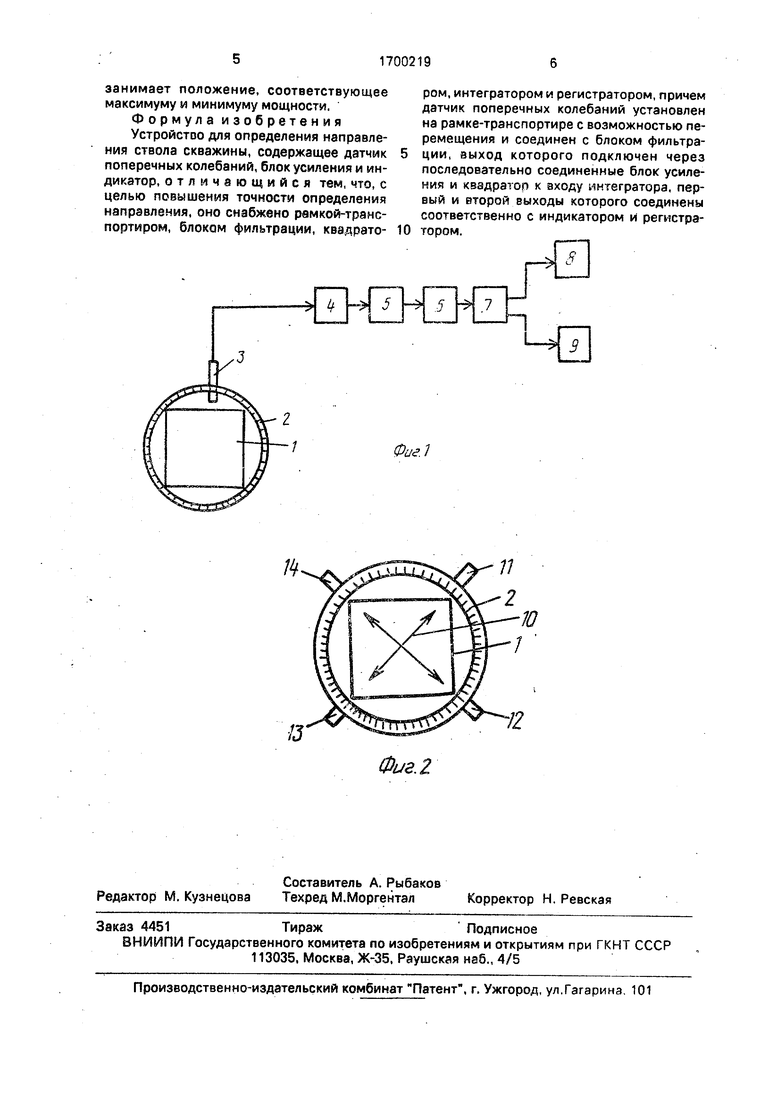
На фиг.2 показана ось 10 поляризации поперечных колебаний ведущей бурильной трубы 1 и положения 11-14 датчика 1 на рамке-транспортире 2 в процессе определения направления ствола скважины.
Рамка-транспортир 2 закреплена на ведущей бурильной трубе 1 с помощью хомута (не показан). Датчик 3 установлен на рамке- транспортире 2 с помощью зубчатого подпружиненного фиксатора или постоянного магнита с возможностью перемещения датчика 3.
Устройство работает следующим образом.
Поперечные упругие колебания, возникающие в процессе бурения и распространяющиеся по бурильной колонне от забоя к поверхности, поляризованы в плоскости работы (ориентирования) отклонителя за счет асимметричности усилий на забое наклонной скважины.
Вследствие этого максимум энергетических затрат и максимум энергии упругих колебаний заключен в той составляющей поляризованной волны, которая ориентирована в плоскости работы отклонителя (в пло- скости искривления ствола). И наоборот, минимум энергии упругих колебаний соответствует направлению, перпендикулярному оси поляризации. Направление искривления скважины будет определено, если будет определено направление оси поляризации. Для этого на ведущей бурильной трубе 1 с помощью хомута „устанавливают отградуированную через 1-2°( от 0 до 359°) рамку-транспортир 2. 8 процессе установки нуль рамки-транспортира ориентируют по направлению юг-север с помощью буссоли (не показана).
На рамку-транспортир 2 устанавливают датчик 3 поперечных колебаний. Упругие колебания бурильной колонны возбуждают датчик 3 (например, датчик электродинамического типа СГ-1-10).
Сигнал от датчика 3 в форме электрического напряжения поступает на вход блока
4фильтрации, где фильтруется в заданной преобладающей полосе частот сигнала, например, 10-40 Гц. С выхода блока 4 сигнал направляется в блок 5 усиления. Средне- выпрямленное напряжение с выхода блока
5поступает в квадратор 6 и далее в интегратор 7. С выхода интегратора 7 сигнал в форме мощности волнового процесса поступает на индикатор 8 и регистратор 9.
В процессе бурения датчик 3 последо- вэтельно перемещают по рамке-транспортиру 2 и при каждом положении датчика 3, например через 1-2°, регистрируют значение мощности на индикаторе 8 и регистраторе 9.
Максимальное значение энергии волнового процесса будет достигнуто, когда направление оси максимальной чувствительности датчика 3 (максимума характеристики направленности датчика) бу- дет совпадать с плоскостью поляризации волны. При этом положении датчика 3 на индикаторе 8 будет отмечаться максимальное значение мощности волнового процесса, а на регистраторе 9 будет зафиксирован всплеск (пик), соответствующий тому положению (в градусах) датчика 3 на рамке- транспортире 2, при котором достигнуто указанное выше совпадение осей чувствительности датчика 3 и поляризации волны.
Это положение датчика 3 и будет соответствовать направлению ствола скважины в градусах. При дальнейшем перемещении датчика 3 по рамке-транспортиру 2 сигнал отдатчика 3 (на выходе интегратора 7} будет иметь минимальное значение. Это значение будет достигнуто при положении датчика 3 на рамке-транспортира 2, перпендикулярном направлению ствола скважины.
Дальнейшее смещение датчика 3 по рамке-транспортиру 2 вызовет появление второго энергетического максимума (всплеска), так как датчик 3 вновь окажется в плоскости поляризации волны.
И наконец второй минимум энергии будет отмечен при смещении датчика 3 в по: ложенме, когда его ось чувствительности будет вновь перпендикулярна направлению поляризации.
Таким образом направление ствола скважины будет охарактеризовано двумя максимумами и двумя минимумами энергии, причем угол смещения датчика 3 от положения максимума к положению минимума будет близок к 90°. Это позволяет избежать .ошибок и существенно повысить точность определения направления ствола скважины за счет четырехкратного измерения азимута искривления,
Пример определения направления ствола приведен на фиг.2.
При положении оси поляризации 10, например, в НИ квадрантах максимум энергии будет отмечен в положениях 11 и 13 датчика 3, а минимум этой величины при установке датчика 3 в положениях 12 и 14.
При расположении оси поляризации ао II-IV,квадрантах максимум энергии будет отмечен при установке датчика 3 в положения 12 и 14, а минимум энергии - в положения 11 и 13..
Наличие рамки-транспортира 2 позволяет с высокой степенью точности установить момент совпадения оси максимальной чувствительности датчика 3 с направлением оси поляризации волнового пакета, следовательно, с направлением ствола скважины, Наличие в устройстве операций квадриро- вания и интегрирования позволяет определить устойчивый и информативный параметры - мощность волновых процессов, и определить минимум и максимум этой величины. Наличие в устройстве индикации позволяет зафиксировать направление оси поляризации (направления искривления) в момент совпадения оси чувствительности датчика 3 с осью поляризации. При этом азимут направления ствола скважин а градусах считывается непосредственно с лимба рамки-транспортира 2, когда датчик
занимает положение, соответствующее максимуму и минимуму мощности. Формула изобретения Устройство для определения направления ствола скважины, содержащее датчик поперечных колебаний, блок усиления и индикатор, отличающийся тем, что, с целью повышения точности определения направления, оно снабжено рамкой-транспортиром, блоком фильтрации, квадрато0
ром, интегратором и регистратором, причем датчик поперечных колебаний установлен на рамке-транспортире с возможностью перемещения и соединен с блоком фильтрации, выход которого подключен через последовательно соединенные блок усиления и квадратор к входу интегратора, первый и второй выходы которого соединены соответственно с индикатором и регистратором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения искривления ствола скважины в процессе бурения | 1983 |
|
SU1086140A1 |
| Система для автоматического управления режимами бурения скважин | 1974 |
|
SU727841A1 |
| Устройство для контроля пространственного положения ствола скважины в процессе бурения | 1977 |
|
SU735753A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА БУРЕНИЯ | 1989 |
|
RU2016193C1 |
| Устройство для измерения вибрации бурильных труб | 1979 |
|
SU909140A1 |
| Индикатор направления искривления наклонных скважин | 1983 |
|
SU1167311A1 |
| Устройство для контроля направления искривления ствола скважины в процессе бурения | 1989 |
|
SU1686145A1 |
| Способ акустических исследований скважин в процессе бурения | 1975 |
|
SU744406A1 |
| Устройство регулирования оптимальной осевой нагрузки на долото | 1981 |
|
SU972065A1 |
| Автоматическое устройство оптимизации режима бурения скважин | 1979 |
|
SU787625A1 |
Изобретение относится к бурению скважин. Цель - повышение точности определения направления ствола скважины. Устр-во «одержит установленную на ведущей трубе 1 рамку-транспортир 2 с датчиком 3 поперечных колебаний, блоки 4 и 5 фильтрации и усилия квадратор 6, интегратор / индикатор 8 и регистратор 9. Датчик 3 последовательно перемещают по рамке-транспортиру 2. Фиксируют значение мощности колебаний через 1-2° на индикаторе 8 регистраторе 9. Максимальное значение мощности соответствует совпадению направления оси чувствительности датчика 3 с плоскостью поляризации волны Направление ствола скважины характеризуется двумя максимумами и двумя минимумами энергии. Применение устр-ва позволяет избежать ошибок и повысить точность определения направления за счет четырехкратного измерения азимута. 2 ил.
Фиг
Фиг. 2
| Способ контроля направления искривления ствола скважины в процессе бурения и устройство для его осуществления | 1981 |
|
SU1052653A1 |
