(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОСТРАН(1|ВЕННОГО . . ПОЛОЖЕНИЯ СТВОЛА СКВАЖИНЫ В ПРОЦШСЕ БУРЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный инклинометр | 1983 |
|
SU1146425A1 |
| Система для автоматического управления режимами бурения скважин | 1974 |
|
SU727841A1 |
| СПОСОБ КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ БУРОВОГО ДОЛОТА В ПРОЦЕССЕ БУРЕНИЯ | 2006 |
|
RU2305298C1 |
| Устройство для контроля частоты вращения вала турбобура | 1990 |
|
SU1719627A1 |
| Способ выделения и оценки нефтегазоносных пластов-коллекторов | 1981 |
|
SU1013886A1 |
| Устройство для контроля частоты вращения вала турбобура | 1982 |
|
SU1055864A1 |
| Глубинное устройство для цифровой записи параметров траектории скважины | 1980 |
|
SU903565A1 |
| СИСТЕМА КОНТРОЛЯ ПРОЦЕССА ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СТВОЛОВ ПРИ КУСТОВОМ БУРЕНИИ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2013 |
|
RU2541990C1 |
| Устройство для определения направления ствола скважины | 1990 |
|
SU1700219A1 |
| Способ передачи информации побуРильНОй КОлОННЕ B СКВАжиНЕ | 1977 |
|
SU812914A1 |
Изобретение относится к буровой тех нике и может быть использовано для определения искривления стбола скважины в процессе бурения. Известны устройства для контроля пространственного положения ствола сква жины в процесса бурения, содержащие датчики азимута и угла наклона скважины, расположенные непосредственно в нижней части бурильной колонны и свя занные с регистрирующей аппаратурой, находящейся на поверхности, посредством электрического канала связи 1. Такие устройства обладают низкой надежностью, так как датчики испытывают значительные перегрузки при бурении и требуют изменения конструкции ряда узлов нижней части бурильной колонны. Кроме того, осуществление надежного электрического канала связи ослолшяет процесс проводки наклонноналравленньгх скважин. Наиболее близким к изобретению является устройство для контроля простра ственного положения ствола скважины в процессе бурения, содержащее наземные датчики упругих колебаний, датчик глубины скважины, блок усиления, блок фильтрации, блок сравнения амплитуд и блок регистрации . -. Однако такое устройство обладает низкой точностью определешш пространственного положения ствола скважины, связанной с использованием только кинемаТ1гческих или динамических харазстеристик регистрируемых упругих колебаний, и слоншостью выделения сигнала прямой волны от забоя скважины на фоне помех. Целью изобрете шя является повышение точности определения пространственного положения ствола скважины путем одновременного измерения кинемат1«еских и динамических характеристик упругих колебаний. Это достигается тем, что устройство снабжено преобразователем аналог-код, запоминающим устройством, коммутатором, блоком регулируемой временной задержки.
множительным устройством, интегратором, блоком выделения максимума, блоком синхронизации, блоком памяти и блоком вычисления координат, причем выходы блока фильтрации через преобразователь аналог-код и датчик глубины и через блок синхронизации подключены к запоминающему устройству, выходы которого через коммутатор и последовательно включенный блок регулируемой временной за- ю держки подключены к входу множительного устройства, ко второму входу которого подключен выход коммутатора непосредственно, а выход множительного 5хЛройства через интегратор подключен 15 X входу блока выделения максимума, один из выходов которого непосредственно, а другой через блоки гсшгхронизации и ре.гулируемой временной задерж.ки подсоединены к блоку памяти, с которым непос- 20. редственно .связаны блок сравнения амплитуд и блок вычисления координат, а также запоминающее устройство и коммутатор через блок синхронизации, а ьыход. блока памяти подключен к блоку регистрации. 25
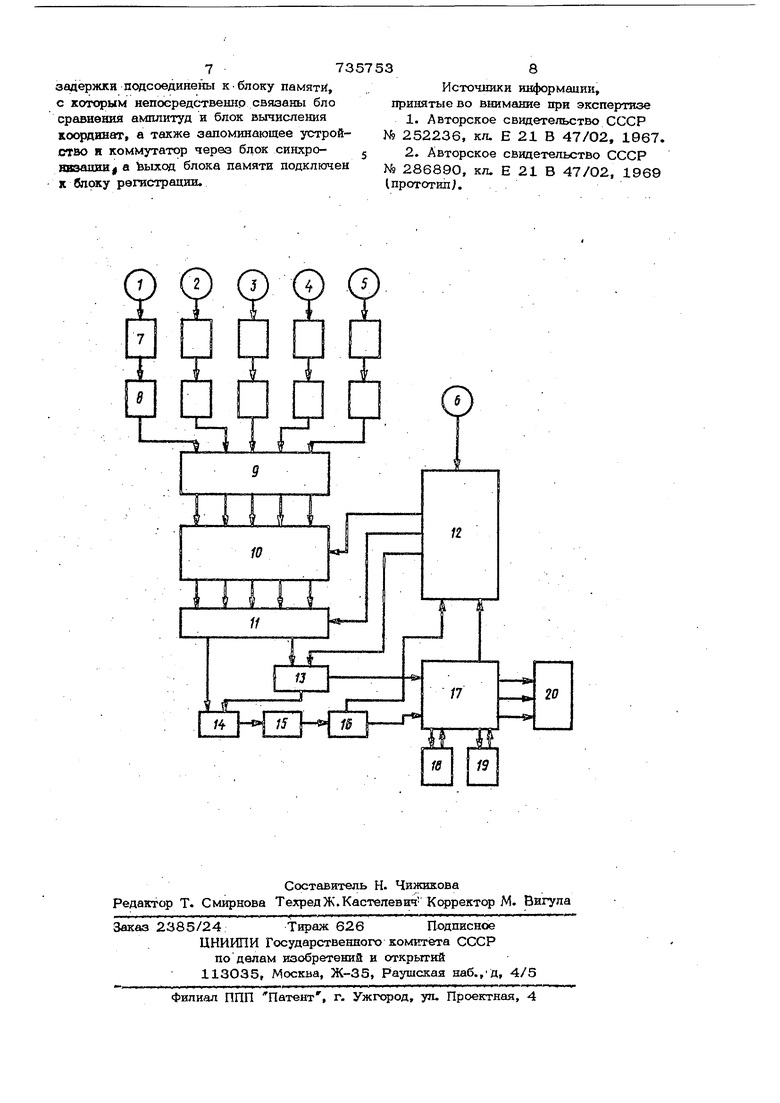
На чертеже дана фуисциональная.схема предлагаемого устройства.
Устройство содержит датчик 1 упругих колебаний на колонне и датчики 2-5 упругих колебаний на поверхности земли, 30 например трехкомпонентные сейсмоприемники, позволяющие регистрировать продольные и поперечные колебания, датчик 6 глубины скважины, например сельсинный датчик перемещения бурильной 35 колонны, блок усиления 7, блок фильтрации 8, преобразователь 9 аналог-код, .запоминающее устройство, нацример маг нйтный регистратор 10; коммутатор Ц, блок синхронизации 12, блок 13 регули- 40 руемой временной задержки, множительное устройство 14, интегратор 15, блок 16 вьщеления максимума, блок памяти 17,. блок 18 сравнения, амплитуд, блок 19 вычислезшя координат и блок 45 регистрации 20.
Устройство для контроля пространственного положения ствола скважины в процессе бурения работает следующим образом.50
Упругие колебания, возникающие на забое в процессе бурения (непрерывные или импульсные), после распространения по колонне бурильных труб и в толще горных пород принимаются в верхней части колон- iS ны датчиком 1 и датчиками 2-5, установленными на дневной поверхности, например, по двум взаимно перпетадикулгфным направлениям с центром пересечения в устье скважины. Информация о глубине скважины поступает с датчика 6. Электрические сигналь от датчиков 1-5 поступают через блок усилешм 7, блок фильтрации 8, осуществляющий фипьтрашпо продольных и поперечных колебаний в соответствии с числом оборотов породорйзрушающего инструмента, и преобразователь 9 аналог-код в запоминающее устг ройство 10. При помощи коммутатора 11 из запоминающего устройства 10 выбираются сигналы, соответствующие однотипным колебаниям от пары датчиков, один из которых поступает непосредственно на вход множительного устройства 14, а другой через блок 13 регулируемой временной задержки. Опорным сигналом может быть сигнал -f j(i1oT датчика 1 на бурильной колонне или сигнал любого из наземных датчиков в зависимости от выбранной методики вычисления координат забоя. С выхода устройства 14 результирующий сигнал fjCt)f2(t--D) поступает на Вход интегратора 15,вычисляющего функцию взаимной корреляции сигналов . При помощи блока 16 определяется момент, когда задержка, задаваемая блоком 13, соответствует К,
.
Д
В этот момент блок 13, связанюый с блоком 16 через блок синхронизации 12, вьфабатывает импульс, соответствующий 1 макс,. который поступает в блок памяти 17. В блок 17 поступает также вьщеленное блоком 16 значение . Далее блок 12, согласованный с блоком 17, вьфабатывает управляющий сигнал на блоки 1О и 11, после чего производит ся вычисление и фиксация в блоке 17 значений tp макс и мaкc. Так вычисляются все значенияСд максTQ J макс н R 2 макс-R gмакс.
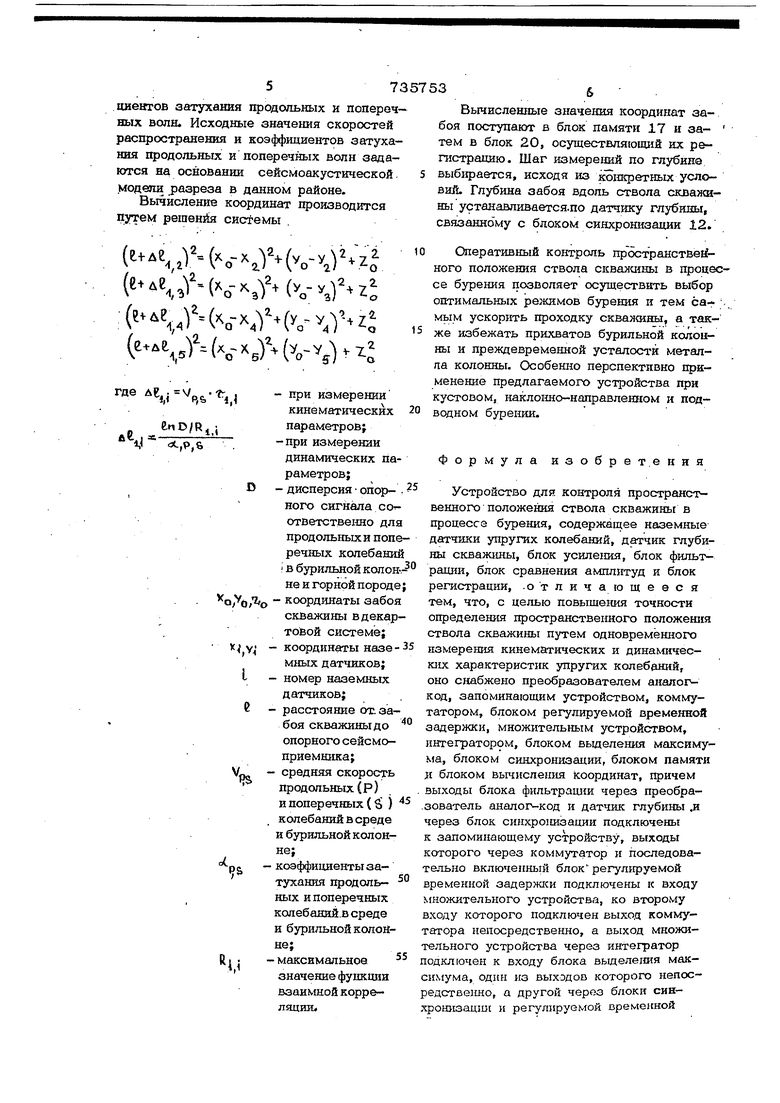
{1осле этогосигналы, соответствующие R MaKC-R,g макс выбираются из блока памяти 17 и поступают в блок 18. Результат сравнения записывается в блок пам.5гги 17. Аналогично в блоке памяти накапливаются кинематические и динамические характеристики поперечных колебаний, зарегистрированных трехкомпонентными сейсмопрйемниками. Блок 19 вычисления координат осуществляет независимо преобразование значений CR - макс макс и результатов сравнения амплитуд для каждого типа волны в координаты забоя, а также коррекцию результатов вычислений путем введения поправок, уточняющих геоакустическую модель разреза скважины за счет подбора значений скоростей ОасППОГГРппиоттст J-1 циеагов затухания продольных и попереч ных волн. Исходные значе1шя скоростей распространения и коэффициентов затухания продольных и поперечных волн задаются на основании сейсмоакустической. модели разреза в данном районе. Вычисление координат производится путем решения системы (((v.)z (e,f-(VNf(v,-v,)%z («.(. (, v v-при измерении кине матических RnP/R j параметров; -при измерении динамических па раметров; -дисперсия oiiopного сигнала соответственно дл продольных и поп речных колебани i в бурильной колон не н горной породе , - координаты забоя скважины в декар товой системе; -координаты назе мных датчиков; -номер наземных датчиков; расстояние от забоя скважины до опорного сейсмоприемника;-средняя скорость продол ьных(Р) ипоперечных( ) колебаний в среде и бурильнойколонне;-коэффициенты затухания продольных и поперечных колебаний.в среде и бурильной колонне;- максимальное значение функшш взаимной корреляцииВьгаисленные значения координат забоя поступают в блок памяти 17 и затем в блок 20, осуществляющий их регастрадию. Шаг измерений по глубине выб1фается, исходя из кошфетных условий. Глубина забоя вдоль ствола скважины устанавливается-по датчику глубины, связанному с блоком синхронизации 12. Оперативный контроль прбстранствейного положения ствола сквамшны в процессе бурения позволяет осуществить выбор оптимальных режимов бурения и тем са-;. мым ускорить проходку сквалсины, а также избежать прихватов бурильной колонны и преждевременной усталости металла колонны. Особенно перспективно применение предлагаемого устройства при кустовом, накло1сно-направленном и подводном бурении. Формула изобре т.е кия Устройство для контроля пространственного положения ствола скважины в процессе бурения, содержащее наземные датчики упругих колебаний, датчик глубины скваж1шы, блок усиления, блок фильтрации, блок сравнения амплитуд и блок регистрации, .отличающееся тем, что, с целью повышегшя точности определения пространственного положения ствола скважины путем одновременного намерения кинематических и динамичесKitx характеристик упругих колебаний, оно снабжено преобразователем аналогкод, запоминающим устройством, коммутатором, блоком регулируемой временной задержки, множительным устройством, интегратором, блоком выделения максимума, блоком синхронизации, блоком памяти и блоком вычисления координат, причем выходы блока фильтрации через преобразователь аналог код и датчик глубины .и через блок синхро1шзации подключены к запоминающему устройству, выходы которого через коммутатор и последовательно включенный блок регул1фуемой временной задержхси подключены к входу множительного устройства, ко второму входу которого подключен выход коммуатора непосредственно, а выход множиельного устройства через интегратор одключен к входу блока выделения макимума, один из выходов которого непоседственно, а другой через блоки синронлзацш и регулируемой време1 ной
задержки подсоединены к-блоку памяти, с которым непосредственно связаны бло ср шнения амплитуд и блок вычисления координат, а также запоминающее устройство и коммутатор через блок синхронвзацин| а Ьыход блока памяти подключен к блоку регистрации.
Источники информации, принятые во внимание при экспертизе
№ 252236, кл. Е 21 В 47/02, 1967.
№ 286890, кл. Е 21 В 47/О2, 1969 1прототнл;.
