где Do диаметр выходного зрачка объектива прожектора с фокусным расстоянием f0;
Пр - размер притупления разделительной призмы;
б ps суммарная угловая аберрация объектива;
ат - расстояние от ребра призмы до поверхности осевого упора корпуса;
b - расстояние от задней главной поверхности объектива до поверхности осевого упора его оправы.
В поле зрения прожектора на рабочем органе (не показан) землеройной машины расположен приемник 6 излучения, выход которого соединен с входом блока 7 формирования сигналов управления. 7 содержит усилитель 8, блок 9 разделения сигналов, детекторы 10 и 11, сумматоры 12 и 13, полосовые фильтры 14 и 15, инвертор 16, формирователь 17 порогового уровня, компараторы 18 и 19. Уровень срабатывания компараторов устанавливается суммой сигналов среднего значения разиомодули- рованных источников излучения с выхода фильтра 14 после прохождения формирователя 17. Тот же сигнал с выхода фильтра 14 подается на сумматор 20, на инверсный вход которого подается напряжение источника 21 опорного напряжения, а выход этого сумматора подключается к управляющему входу усилителя 8 и к входу компаратора 22, выход которого подключается к входу индикатора 23.
Работа оптико-электронного датчика поперечных смещений сострит в следую щем.
Источники разномодулированного излучения освещают грани разделительной призмы. Объектив проецирует ребро призмы так, что на дальности фокусировки , определяемой толщиной корректирующего кольца, ширина переходной зоны с учетом аберраций объектива и размеров притупления ребра призмы равна диаметру выходного зрачка объектива прожектора. Тем самым происходит компенсация геометрического фактора нестабильности чувствительности датчика. Приемник излучения находится внутри переходной зоны и электрический сигнал на его выходе является суммарным сигналом от воздействия обоих разномоду- лированных источников излучения. После его усиления усилителем он разделяется блоком 9 на два независимых сигнала двух источников излучения. Эти сигналы после преобразования в детекторах попадают в два сумматора. Сумматор 12 с равнозначными входами служит для полученич сигнала суммы сигналов источников (сигнал суммы).
Сумматор 13 имеет один прямой и один инверсный вход и служит для получения сигнала разности сигналов источников (сигнал разности). Сигнал суммы после прохождения фильтра попадает параллельно на сумматор 20 и формирователь порогового уровня. Сумматор 20 на своем выходе формирует сигнал, пропорциональный разности между напряжением опорного
0 источника и сигналом суммы, который используется для управления усилителем.Когда напряжение сигнала суммы равно 0, его коэффициент усиления максимальный. В зависимости от уровня потока на приемнике и
5 с учетом динамики управления АРУ устанавливается определенное значение сигнала суммы, которое формирователем 17 порою- вых уровней в зависимости от требуемой относительной величины (относительно ши0 рины переходной зоны) чувствительности превращается в пороговый уровень компараторов 18 и 19.
Сигнал разности с фильтра 15 попадает на сигнальный вход компаратора 19 и. если
5 он больше порогового уровня, вызывает его срабатывание. Если сигнал разности противоположной полярности относительно сигнала суммы, то компаратор 19 сработать не может. В этом случае сигнал разности после
0 прохождения инвертора 16 попадает на компаратор 18. аналогичный 19.
При изменении пропускания или дистанции управления происходит одновременное изменение и сигнала суммы, а
5 следовательно, и порогового уровня компаратора, и сигнала разности - при одной и той же линейной величине рассогласования их относительная величина не изменится. Если случайным объектом приемник из0 лучения бедут экранирован, то резко упадет величина сигнала управления АРУ и сработает компаратор 22, который включит индикатор 23. Такое же действие будет происходить и при уменьшении величины
5 сигнала приемника 6 на больших дальностях и плохих метеоусловиях,что позволяет исключить работы датчика при малых соотношениях сигнап/шум.
Формула изобретения
01. Оптико-электронный датчик поперечного смещения землеройной машины, содержащий прожектор, установленный на поверхности грунта, в корпусе которого расположен объектив, вблизи фокальной пло5 скости которого расположены два разномо- дулированных источника излучения и между ними разделительная призма, а в поле зрения прожектора установлен на рабочем органе землеройной машины приемник излучения, блок формирования сигналов управления, соединенный входом с выходом приемника излучения и включающий в себя усилитель, блок разделения сигналов, вход которого подключен к выходу усилителя, а выходы через соответствующие детекторы - к входам первого и второго сумматоров, соединенных выходам с входами соответствующих полосовых фильтров, а также компараторы, выходы которых подключены к выходам датчика, а первый вход первого компаратора соединен с выходом первого полосового фильтра, отличающийся тем, что, с целью повышения точности датчика за счет обеспечения постоянства его чувствительности на всей дистанции его эксплуатации, между объективом прожектора и поверхностью осевого упора корпуса установлено корректирующее кольцо, толщина которого равна
Пк Do fo . - (ат + Ь).
к D -Пр -i0d(ps l
где Do - диаметр выходного зрачка объектива прожектора с фокусным расстоянием f0;
Пр - размер притупления разделительной призмы;
dtps суммарная угловая аберрация объектива;
ат - расстояние от ребра призмы до поверхности осевого упора корпуса;
b - расстояние от задней главной поверхности объектива до поверхности осевого
упора его оправы,
а в блок формирования сигналов управления введены последовательно соединенные источник опорного сигнала и третий сумматор, формирователь порогового уровня и инвертор, вход которого подключен к выходу первого полосового фильтра, а выход - к первому входу второго компаратора, второй вход которого связан с выходом формирователя порогового уровня и с вторым входом
первого компаратора, второй вход третьего сумматора соединен с выходом второго полосового фильтра и с входом формирователя порогового уровня, а выход - с управляющим входом усилителя, информационный вход которого подключен к входу
блока формирования сигналов управления.
2. Датчик поп 1,отличающийся
тем. что, с целью повышения удобства его
эксплуатации, блок формирования сигналов
управления содержит последовательно соединенные компаратор и индикатор, причем вход компаратора подключен к выходу третьего сумматора
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОПЕРЕЧНЫХ СМЕЩЕНИЙ | 1993 |
|
RU2066845C1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОЛОЖЕНИЯ МЕХАНИЗМА | 1996 |
|
RU2095754C1 |
| Адаптивное устройство приема оптических сигналов | 1991 |
|
SU1807573A1 |
| Устройство для измерения рабочего отрезка объективов | 1982 |
|
SU1049768A1 |
| ДАЛЬНОМЕР (ВАРИАНТЫ) | 1995 |
|
RU2082213C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПЛАМЕНИ | 1994 |
|
RU2072480C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ | 2005 |
|
RU2350889C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ МАРКИРОВАНИЯ И УПРАВЛЕНИЯ ВНУТРИТРУБНЫМИ ОБЪЕКТАМИ | 2002 |
|
RU2215932C1 |
| Лазерный фазовый дальномер | 2015 |
|
RU2610514C2 |
| ФАЗОВЫЙ ПЕЛЕНГАТОР | 2011 |
|
RU2458355C1 |
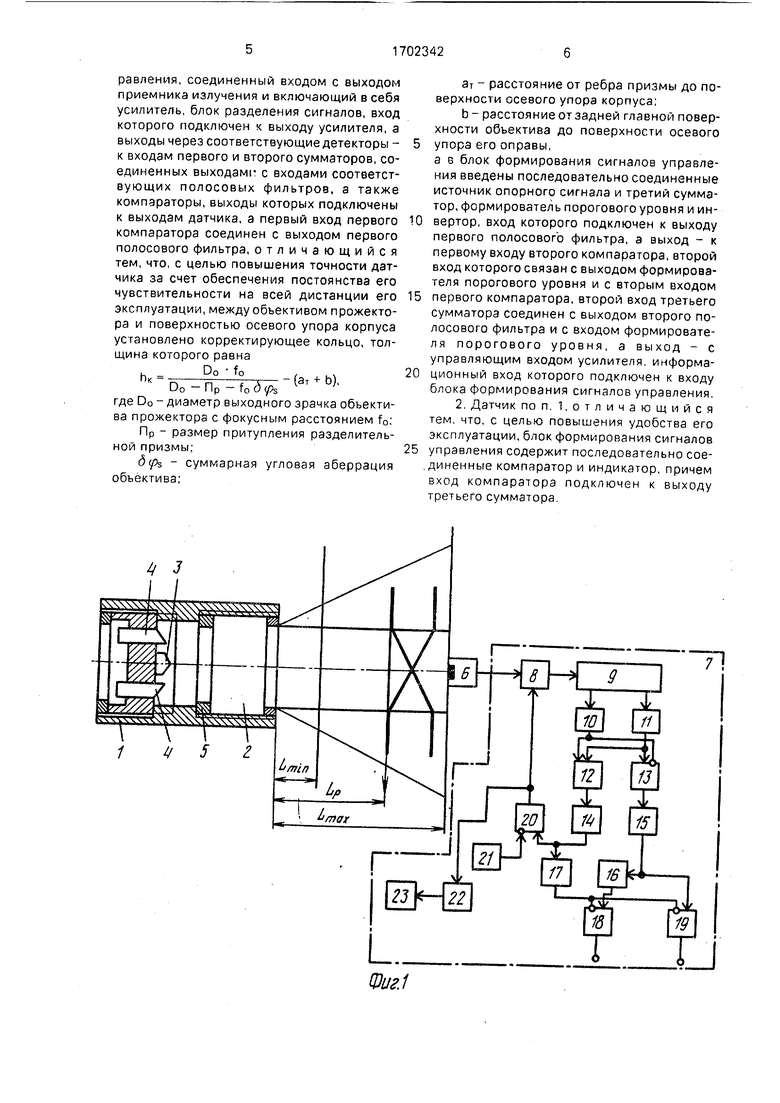
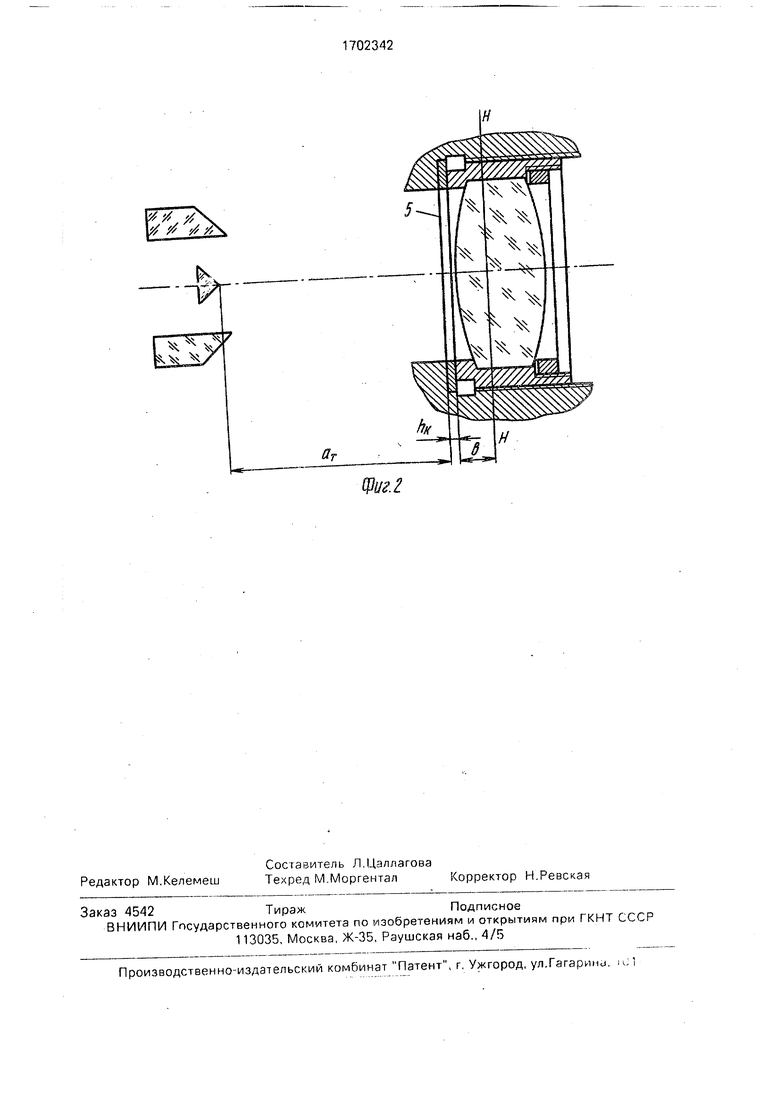
Изобретение относится к области оптико-электронных приборов измерения поперечных смещений и может использоваться в составе системы управления землеройных машин. Изобретение позволяет за счет стабилизации чувствительности датчика повысить точность управления, а также повысить удобство эксплуатации датчика. В состав датчика входит прожектор, в который вхоИзобретение относится к оптико-электронным приборам измерения поперечных смещений и управления объектами и может быть использовано в составе системы управления землеройных машин. Целью изобретения является повышение точности датчика за счет обеспечения постоянства его чувствительности на всей дистанции его эксплуатации вне зависимости от метеоусловий и запыленности, а также повышение удобства эксплуатации датчика. На фиг. 1 изображена схема оптико- электронного датчика поперечных смещедит объектив, разделительная призма и два разномодулированных источника излучения, причем за счет корректирующего кольца обеспечивается постоянство ширины переходной зоны на всей рабочей дистанции. В поле зрения прожектора расположен приемник излучения, жестко связанный с контролируемым органом машины, выход которого подключен к блоку формирования сигналов управления, В блоке формирования сигналов управления после усилителя сигнал поступает в блок разделения сигналов разномодулированных источников излучения. Разделенные сигналы поступают в арифметический блок, формирующий сигнал разности и сигнал суммы сигналов разномодулированных источников. Сигнал разности поступает на компараторы управления, пороговое напряжение которых устанавливается на основании сигнала суммы. Кроме того, сигнал суммы используется для управления усилителем с образованием контура АРУ. 1 з.п.ф-лы, 2 ил. ний землеройной машины; на фиг. 2 - конструкция некоторых узлов прожектора. В корпусе прожектора 1 установлен объектив 2, вблизи фокальной плоскости которого расположена разделительная призма 3 и два разномодулированных источника излучения 4, причем между поверхностью осевого упора корпуса и объективом прожектора установлено корректирующее кольцо 5. толщина которого рассчитывается по формуле Do -to Р w b о ю со 4 Пк Do - Пр - f0 б р$ - (ат + Ь),
4 J
f
т г. г
| Гридин А.С., Цуккерман С.Т | |||
| Управление машинами при помощи оптического луча | |||
| Л.: Машиностроение, 1989, с | |||
| Счетная линейка для вычисления объемов земляных работ | 1919 |
|
SU160A1 |
