Периодически при перегрузке упорной КОЛОМНЫ 1, что определяется показаниями замеров тензодатчиков, оператор включает тяговые движители, взаимодействующие с плавучей платформой.
Пример. Глубина моря на точке производства работ 5 м. Допускаемое отклонение плавучей платформы от оси скважины не более 0.05 м.
Величина заглубления упорной колонны в грунт имеет расчетное значение (для примера около 2.0 м).
Расчетное усилие на всех курсовых углах на упорную колонну допускают по условиям работы колонна-грунт 15КН (без работы тяговых движителей).
В рабочем режиме оператор получает замер-внешнее воздействие по курсу юго-восток 22° составляет 16,5 КН, оператор включает тяговые движители в направлении северозапад 22 на усилие 1,5 КН. При получении замера внешней нагрузки, равной 15 КН, оператор выключает тяговые движители.
Формула изобретения Способ удержания плавучей платформы на точке производства работ, заключаю щийся в том, что плавучую платформу устанавливают на точке, соединяют с упорной колонной, погруженной в грунт, ив рабочем режиме стабилизируют положение плавучей платформы, отличающийся тем, что, с целью повышения эффективности способа за счет снижения величины перемещений плавучей платформы в горизонтальном направлении при установке ее на мелководье, перед установкой плавучей платформы на точке ее соединяют с упорной колонной с помощью карданного подвеса, замеряют непрерывно в рабочем режиме внешнюю нагрузку на упорную колонну с помощью тензодатчиков, установленных на каждой оси карданного подвеса, и периодически компенсируют перегрузку упорной колонны, для чего включают тяговые движители, взаимодействующие с плавучей платформой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучая платформа | 1988 |
|
SU1703548A1 |
| САМОПОДЪЕМНАЯ ПЛАВУЧАЯ БУРОВАЯ ПЛАТФОРМА С МАЛОЙ ОСАДКОЙ | 2014 |
|
RU2589237C2 |
| ПЛАТФОРМА-АМФИБИЯ ДЛЯ ПЕРЕМЕЩЕНИЯ, ПОЗИЦИОНИРОВАНИЯ И НЕПОДВИЖНОГО БАЗИРОВАНИЯ РАБОЧИХ СРЕДСТВ И МЕХАНИЗМОВ В ХОДЕ ОСУЩЕСТВЛЕНИЯ РАБОТ | 2010 |
|
RU2468932C2 |
| ЛЕДОСТОЙКИЙ БУРОВОЙ КОМПЛЕКС ДЛЯ ОСВОЕНИЯ МЕЛКОВОДНОГО КОНТИНЕНТАЛЬНОГО ШЕЛЬФА И СПОСОБ ФОРМИРОВАНИЯ ЛЕДОСТОЙКОГО БУРОВОГО КОМПЛЕКСА ДЛЯ ОСВОЕНИЯ МЕЛКОВОДНОГО КОНТИНЕНТАЛЬНОГО ШЕЛЬФА | 2011 |
|
RU2478057C2 |
| СПОСОБ ЭКСПЛУАТАЦИОННОГО БУРЕНИЯ НА МЕЛКОВОДЬЕ | 2004 |
|
RU2275486C1 |
| Способ транспортировки самоподъемной плавучей буровой установки | 2019 |
|
RU2719650C1 |
| КОМПЛЕКС ДЛЯ МОНТАЖА МОРСКОЙ ЛЕДОСТОЙКОЙ ПЕРЕСТАВНОЙ ПЛАТФОРМЫ И СПОСОБ ЕЕ ТРАНСПОРТИРОВКИ И МОНТАЖА ПОСРЕДСТВОМ КОМПЛЕКСА ДЛЯ МОНТАЖА | 2005 |
|
RU2309221C2 |
| ЛЕДОСТОЙКИЙ ОПОРНЫЙ БЛОК МОРСКОЙ БУРОВОЙ ПЛАТФОРМЫ И СПОСОБ ЕГО УСТАНОВКИ НА ДНЕ КОНТИНЕНТАЛЬНОГО ШЕЛЬФА | 2002 |
|
RU2249079C2 |
| Морская полупогружная буровая установка | 1989 |
|
SU1675481A1 |
| ЛЕДОСТОЙКИЙ БУРОВОЙ КОМПЛЕКС ДЛЯ ОСВОЕНИЯ МЕЛКОВОДНОГО КОНТИНЕНТАЛЬНОГО ШЕЛЬФА | 2008 |
|
RU2382849C1 |
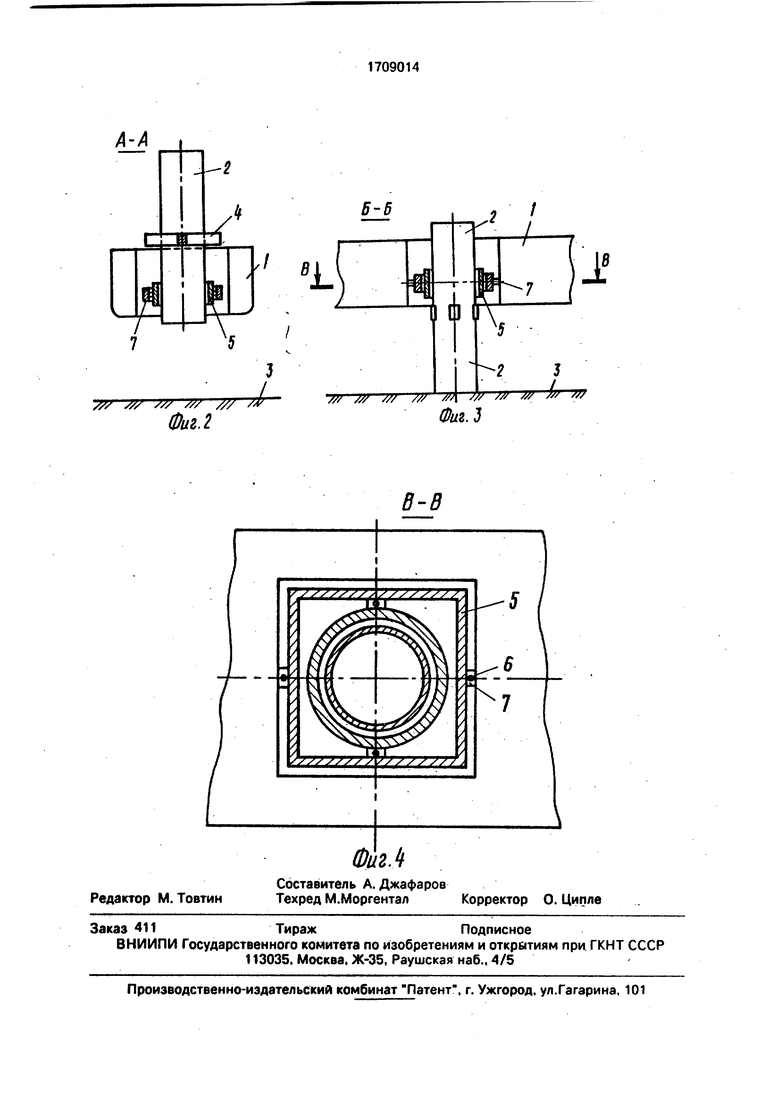
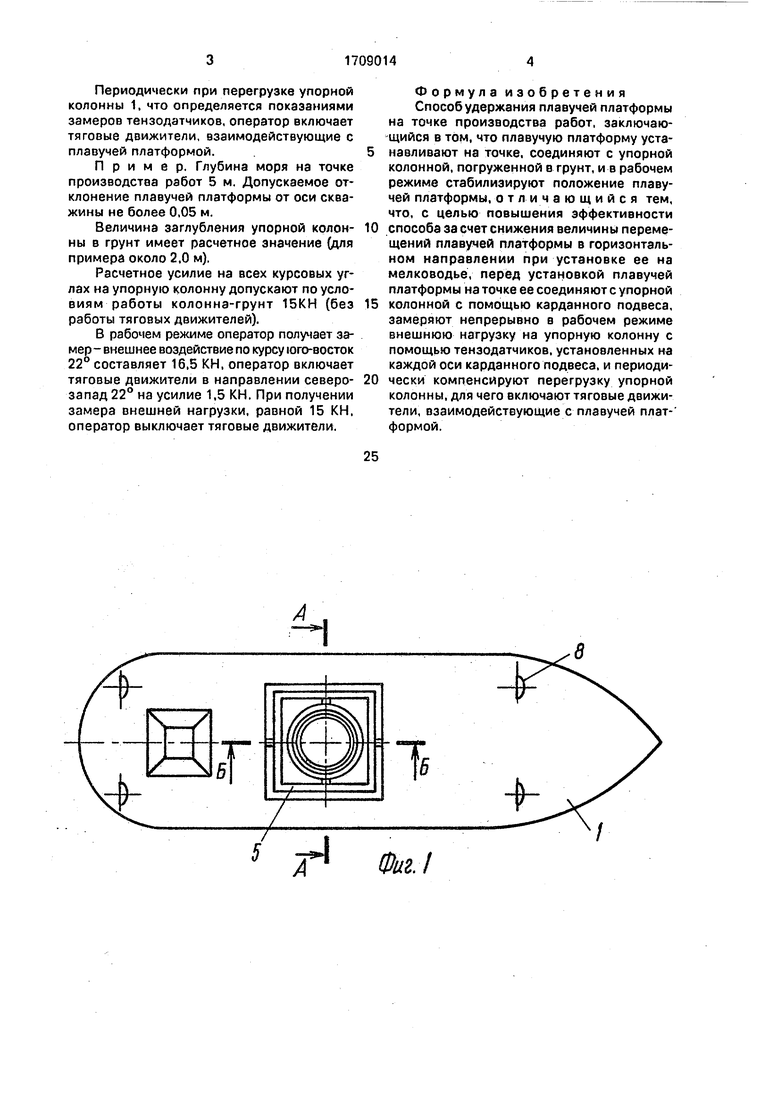
Изобретение относится к гидротехническому строительству. Цель изобретения - повышение зффективности способа за счет снижения величины перемещений платформы в гбризонтальном направлении при установке ее на мелководье. В рабочем режиме непрерывно замеряют величину и направление воздействия на упорную колонну внешней нагрузки. Лри превышении зтой нагрузки допустимого предела, воспринимаемого упорной колонной, вк/1ючают тяговые движители, создающие усилие, приложенное к плавучей платформе, по величине и направлению компенсирующее перегрузку упорной колонны. Включение в каждую ось карданного подвеса тензодат- чиков, соединенных дифференциалом, выходной сигнал которого поступает в решающее устройство, регулирующее величину и направление тяги движителей, позволяет повысить надежность работы на мелководной акватории. 4 ил.t/iСИзобретение относится к технике зкс- плуатации плавучих технических средств - удержанию (позиционированию) плавучих средств для освоения морских месторождений нефти и газа на точке производства работ, в частности на мелководной акватории.Цель изобретения - повышение эффективности способа за счет снижения величиг ны перемещений плавучей платформы в горизонтальном направлении при установке ее на мелководье.На фиг.1 показана плавучая платформа, вид сверху; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1; на фиг,4 - сечение В-В на фиг.З.Способ осуществляют следующим образом.Плавучую платформу 1 (фиг.1) устанавливают на точке производства работ, соединяют с помощью подвижно сочлененной с ней упорной колонной 2, погруженной в грунт акватории 3.В транспортном положении упорная колонна 2 закреплена на палубе плавучей платформы 1 транспортным креплением 4 (фиг.2). Перед установкой плавучей плат- Формы 1 на точке ее транспортное крепление 4 удаляют и платформу 1 соединяют с упорной колонной 2 с помощью карданного подзеса 5. Гидравлическими домкратами (не показаны) упорную колонну опускают и задэБливают в грунт акватории 3.С этого момента начинает действовать рабочий режим. В рабочем режиме непрерывно замеряют внешнюю нагрузку на упорную колонну с помощью тензодатчи1сов б, установленных на каждой оси карданного подвеса 7 (фиг.4).S ю о
Фиг.1
| Буровое судно | 1988 |
|
SU1588632A1 |
| кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
