Изобретение относится к электротехнике, в частности к автоматике электроэнергетических систем.
Целью изобретения является повышение качества регулирования внеплановых колебаний частоты и перетоков активной мощности путем мин имального отклонения фактической мощности электростанций от плановой.
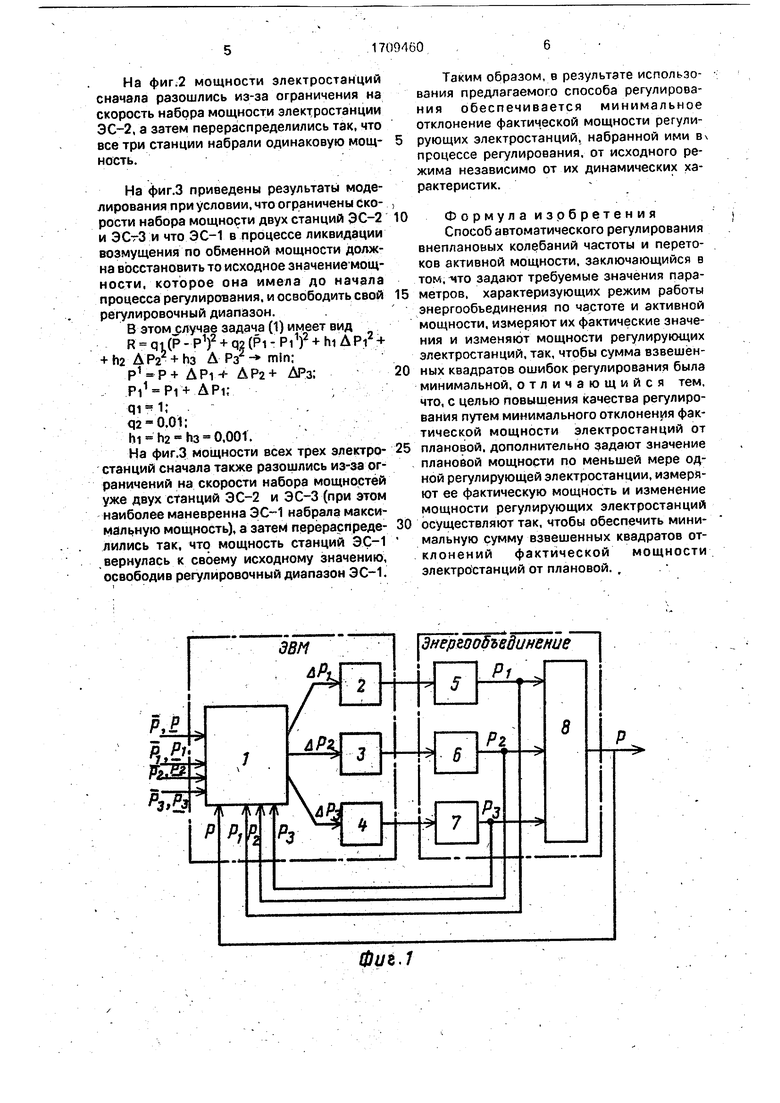
На фие. 1 приведена блок-схема системы регулирования, реализующей предлагаемый способ; на фиг.2 и 3 - осциллограммы моделирования переходных процессов.
Чтобы обеспечить минимальное отклонение фактической мощности электростанций от плановой, в состав телеизмерений, помимо частоты и перетоков, вводятся телеизмерения фактической мощности электростанций, а в состав уставок - значения плановой мощности.
В общем случае требование минимального отклонения мощности электростанций от плановой может противоречить требованиям, вытекающим из задачи регулирования частоты и перетоков. Это противоречие может быть разрешено путем задания режимам регулирования частоты и перетоков более высоких приоритетов, чем режимам регулирования внеплановой мощности электростанций.
В качестве устро1; ства, позволяющего реализовать предлагаемый способ регулирования, можно использовать управляющую ЭВМ, рассчитывающую управляющие воздействия U в результате решения следующей оптимизационной задачи управления многосвязной системой:
R EQE + - mln;(1)
X
где X {хп}, хп - фактическое значение п-го контролируемого параметра;
и {um}. Urn-управляющее воздействие на т-ю электростанцию;
К {knm} - матрица коэффициентов влияния управлений U на контролируемые параметры X;
X {хп} - значения контролируемых параметров, KOTOpii e они приобретут в ре зультатеизменения мощности электростанций на величину U; .
E { nj-ошибка регулирования после изменений мощности электростанций на величину Ц;
0, если Хп Хп ;
если X п
Хп X П1
/ „ „I если -х п X;
/ Хп X П,
Хп и Хп - соответственно верхняя и нижняя уставки на требуемое значение п-го контролируемого параметра;
Q {qnn} . Н {hmm} - диагональные матрицы весовых коэффициентов при ошибках регулирования и при управляющих воздействиях соответственно.
В том случае, если элементы матрицы Q существенно больше элементов матрицы Н, управляющи&воздействия U, найденные из условия минимума функции R, представляют собой приращения мощностей регулирующих электростанций, необходимые для компенсации.текущих Значений отклонений фактических значений контролируемых параметров от требуемых. При этом весовые коэффициенты Q определяют относительную приоритетность (по точности регулирования) контролируемых параметров, а весовые коэффициенты Н -относительную долю участия каждой регулирующей электростанции на данном вычислительном цикле.
Рассмотрим задачу регулирования перетоков обменной мощности энергообъединения с тремя регулирующими электростанциями.
Схема (фит.1) содержит блок 1 расчета управляющих воздействий, который решает
задачу (1), блоки 2, 3 и 4 ПИ-регуляторов, блоки 5, 6 и 7, представляющие три регулирующие электростанции ЭС-1, ЭС-2 и ЭС-3 со своими локальным и системами регулирования, и блок 8, представляющий электрическую сетьэнергообъединения с его внутренними и внешними связями.
На входыблока 1, в качестве уставок подаются требуемое значение обменной мощности энергообьединения Р Р (Р 5 верхняя граница; - нижняя граница области требуемых значений), плановая мощность первой электростанции Pi Pi, плановая мощность второй электростанции Р2 Р2 и плановая мощность третьей элект0 ростанцииРз Рз. В качестве фактических значений регулируемых параметров на другие входы блока 1 подаются телеизмерения текущих значений обменной мощности Р и текущих мощностей каждой регулирующей
5 электростанции Pi, Ра и Рз.
В этом случае задача (1) имеет вид. R qi (Р - PY -Н q2 (Pi -„ PN)2 + qa fP2 P2j) ) +q4(P3-P3) +hi APr + h2
РЗ
P P + APi
Pi PI + APi;
P2 P2+ AP2:
РЗ РЗ+ АРз;
qi 1; 5 qj дз q4 0,01;
hi h2 h3-0,001.
Первый член целевой функции Р представляет собой ошибку регулирования обменной мощности, которая имела бы место 0 в результате изменения мощности трех регулирующих станций на величины APi, А Р2 и А РЗ; второй, третий и четвертый члены представляют .собой величины отклонений мощности каждой из регулирующих 5 электростанций от плановой, которые они имели бы в результате изменения своих текущих мощностей на величины APi,A Р2 и АРз.
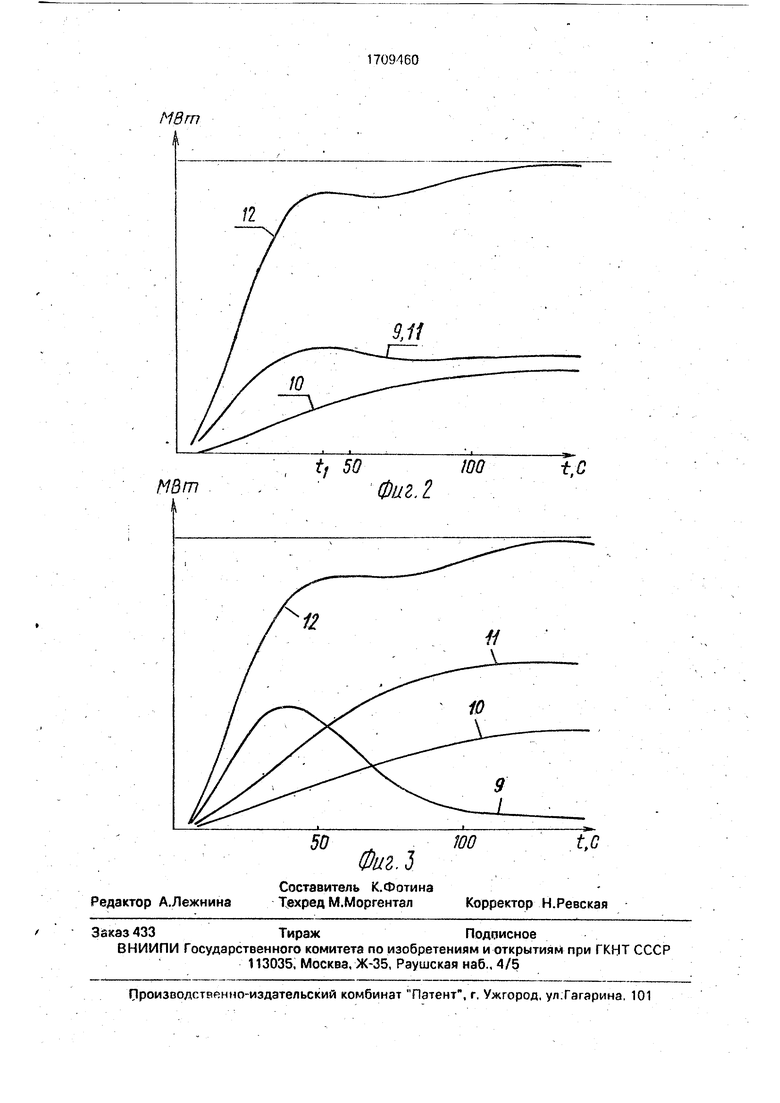
На фиг.2 приведены осцилограммы моделирования переходных процессов при ступенчатом изменении уставки на требуемое значение обменной мощности при условии; что скорость набора мощности электростанции ЭС-2 ограничена: 5 кривые 9,10 и 11 - текущие отклонения фактических мощностей ЭС-1, 3С-2 и ЭС-3 от плановых:. .
кривая 12 - текущее значение перетока обменной мощности. На фиг;2 мощности электростанций сначала разошлись из-за ограничения на скорость набора мощности электростанции ЭС-2, а затем перераспределились так, что все три станции набрали одинаковую мощность. На фиг.З приведены результаты моделирования при условии, что ограничены скорости набора мощности двух станций ЭС-2 и ЭСтЗ и что ЭС-1 в процессе ликвидации возмущения по обменной мощности должна восстановить то исходное значениемощности, которое она имела до начала процесса регулирования, и освободить свой регулировочный диапазон.. В этом случае задача (1) имеет вид R qi (Р - Р + Р2 (Pi - Pi) + hi АPi + + h2 AP2 + h3 A РЗ Арз; API; h2 hs 0.001. Ha фиг.З мощности всех трех электростанций сначала также разошлись из-за ограничений на скорости набора мощностей уже двух станций ЭС-2 и ЭС-З (при этом наиболее маневренна набрала максимальную мощность), а затем перераспределились так, что мощность станций ЭС-1 вернулась к своему исходному значению, освободив регулировочный диапазон ЭС-1. Таким образом, в результате использования предлагаемого способа регулирования обеспечивается минимальное отклонение фактической мощности регулирующих электростанций, набранной ими в процессе регулирования, от исходного режима независимо от их динамических характеристик. Формулаиз обретения Способ автоматического регулирования внеплановых колебаний частоты и перетоков активной мощности, заключающийся в том.-что задают требуемые значения параметров, характеризующих режим работы энергообьединения по частоте и активной мощности, измеряют их фактические значения и изменяют мощности регулирующих электростанций, так. чтобы сумма взвешённых квадратов ошибок регулирования была минимальной, отличающийся тем, что, с целью повышения качества регулирования путем минимального отклонения фактической мощности электростанций от плановой, дополнительно задают значение плановой мощности по меньшей мере одной регулирующей электростанции, измеряют ее фактическую мощность и изменение мощности регулирующих электростанций осуществляют так, чтобы обеспечить минимальную сумму взвешенных квадратов отклонений фактической мощности электростанций от плановой. ,

Изобретение относится к электротехнике, в частности к автоматике электроэнергетических Систем. Предлагаемый способ позволяет повысить качество регулирования путем минимального отклонения фактической мощности электростанций от плановой. Для этого измеряют фактические значения частоты и перетоков активной мощности, задаюттр'ебуемые значения этих параметров, формируют управляющие воздействия, обеспечивающие минимальную- сумму взвешенных квадратов ошибок регулирования, и выдают их в систему регулиро- вания мощности электростанций. Дополнительно измеряют фактическую мощность электростанций, задают значение плановой мощности электростанции^ и формируют управляющее воздействие, обеспечивающее минимальную сумму взвешенных квадратов отклонения фактической мощности электростанций от плановой. 3 ил.слс
зТ5гЦ
Ф|/8./ I днергообъединение PI
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU545038A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
