ческих уставок и весовьж коэффициентов в целом, причем входы первой групы блоков схем сравнения подключены к выходам датчиков генерируемьж моп; костей блока телеизмерений регулирз емых параметров,, к выходам задатчи-ков уставок генерируемых мощностей блока задатчика уставок и коэффициентов влияния и к выходу блока сумматоров, входы второй группы блоков схем сравнения подключены к выходам датчиков частоты и перетоков мощности блока телеизмерений регулируемых параметров и к выходам задатчиков частоты и перетоков мощности блока задатчиков уставок и коэффициентов влияния, выходы первой группы блоков схем сравнения присоединены к входам первого дешифратора, выходы второй группы к входам второго дешифратора, а выходы первого дешифратора присоединены к управляющим входам первого блока регистров, выходы второго дешифратора - к управляющим входам второго и третьего блоков регистров, при этом информационные входы третьего блока регистров подключены к выходу блока задатчиков уставок и коэффициентов влияния р а выходы этих регистров являются выходами блока в целом.
3, Устройство по п. 1, о т л ичающееся тем, что блок расчета коэффициентов долевого участия содержит три блока умножения матриц, блок сложения матриц и инвертор матриц, причем первые входы первого и второго блоков умножения матриц подключены к выходам задатчиков коэффициентов влияния блока задатчиков уставок и коэффициентов влияния, второ вход первого блока умножения матриц подключен к выходу второго блока регистров блока расчета фактических уставок и весовых коэффициентов, выход первого блока умножения матриц присоединен к вторым входам второго и третьего блоков умножения матриц, выход второго блока умножения матриц присоединен к первому входу блока сложения матриц, второй вход которого подключен к выходу первого блока регистров блока расчета фактических уставок и весовых коэффициентов, а выход - к входу инвертора матриц, пр этом выход последнего подключен к первому входу третьего блока умножения матриц, выход которого является выходом блока расчета коэффициентов долевого участия в целом

1. УСТРОЙСТВО АВТОМАТИЧЕдКОГО РЕГУЛИРОВАНИЯ ЧАСТОТЫ И ПЕРЕТОКОВ АКТИВНОЙ МОЩНОСТИ В ЭНЕРГОСИСТЕМЕ, содержащее блок телеизмерения регулируемых параметров, состоящий из датчика частоты, датчиков перетоков мощности и датчиков генерируемых мощностей, блок задатчиков уставок и коэффициентов влияния, состоящий из задатчиков соответственно уставок генерируемых мощностей, перетоков мощности, tracTOTH и коэффициентов влияния, и управляющий блок, связанный своим выходом через канал управления мощностью с регулирующими обьектами энергосистемы, отличающеес я тем, что с целью повышения надежности и экономичности при регули-ровании в энергосистемах сложной конфигурации и большой размерности, управляющий блок выполнен из блока корректирующих фильтров, блока вычитающих устройств, блока умножителей, блока сумматоров, блока расчета фактических уставок и весовых коэффициентов, блока расчета коэффициентов долевого участия, при этом выходы задатчиков частоты и перетоков мощности блока телеизмерений присоединены к одним входам блока вычитающих устройств и блока расчета фактических уставок и весовых коэффициентов, к другому входу которого присоединены также выходы датчиков генерируемых мощностей блока телеизмерений , .выходы задатчиков коэффициентов влияния блока задатчиков уставок и коэффициентов влияния присоединены к входу блока расчета коэффициентов долевого участия, а выходы задатчиков усЙ тавок генерируемых мощностей, перето® ков мощности и частоты этого блока задатчиков присоединены к входу блока расчета фактических уставок и ве1™ совых коэффициентов, первый выход которого подключен к входу блока расчета коэффридиентов долевого участия, а второй выход - к входу блока -jESa Уятг вычитающих устройств, связанного своим выходом с первым входом блока умножителей, второй вход которого под10 ключен к выходу блока коэффициентов долевого участия, а выход присоединен к входу блока сумматоров, причем выход последнего присоединен к входам блока расчета фактических ,уставок и весовых коэф(|)ициентов и блока корректирующих фильтров, выход которого является выходом блокл в целом. 2, Устройство по п. 1, о т л ичающееся тем, что блок расчета фактических уставок и лесопых коэффициентов содержит две г(т1пы блоков схем , входь которых являются входами блока рлсчстл fjinKTH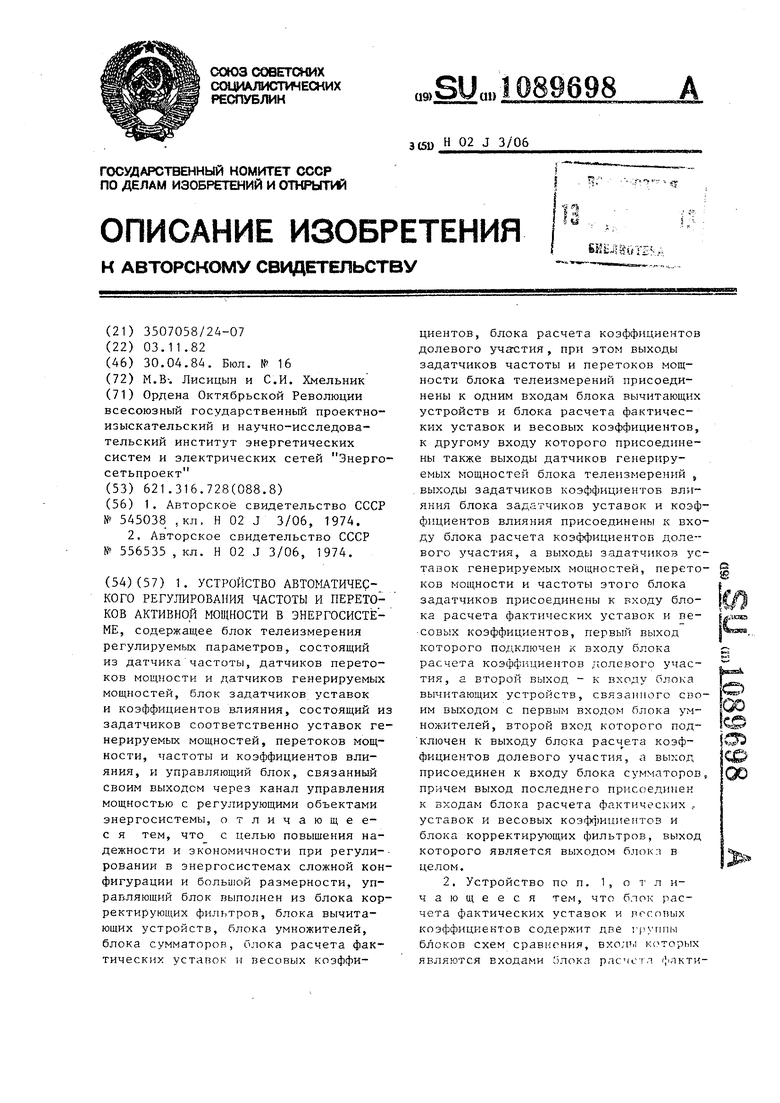
1
Изобретение относится к электроэнергетике.
Известно устройство для автоматическогс регулирования частоты и активной мощности энергосистемы,, состоящее из блоков формирования приращений управляющих воздействий по каждому регулируемому параметру, блоков распределения этих приращений по регулирующим объектам пропорционально заданным коэффициентам долевого участия каждого регулирующего объекта в регулировании того или иного параметра и блоков формирования результирующих управляющих воздействий для каждого регулирующего объекта, где суммируются прирашения управляющих воз-действий, поступившие от блоков распределения прнрлщеннй управляющих воздейс трик гк) леем регулируемым парамет 1с-и. L i X
В процессе регулирования предполагаемое участие энергообъектов в регулировании может быть нарушено (например, вследствие отсутствия у некоторых из них регулировочных диапазонов), а приращения управляющих воздействий на какой-либо объект, полученные в канале регулирования какогото одного параметра, могут противоречить приращениям управляющих воздействий на тот же регулирующий объект, но полученным в канале регулирования другого параметра. Согласование сигналов управления осуществляется на основании предварительного анализа всех возможных ситуаций и становится тем сложнее, чем сложнее конфигурация систем, чем больше в ней регулируемых параметров и регулирующих
объектов.
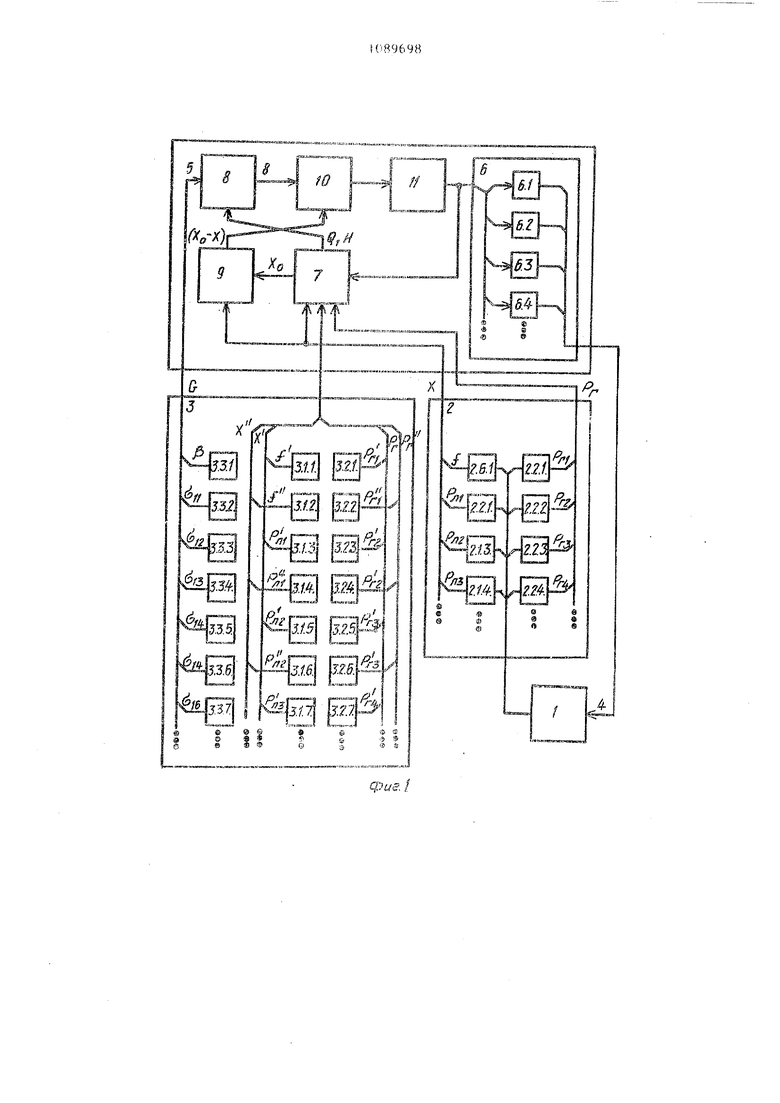
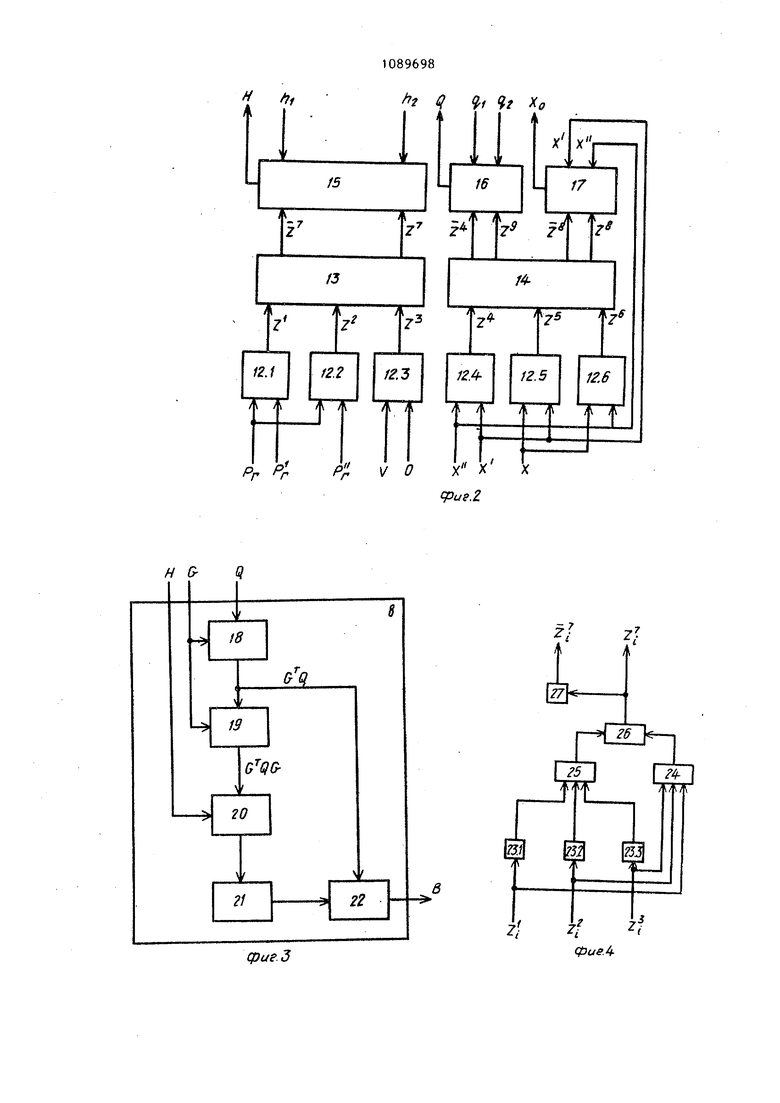
В системах сложной KofrturypanHH, которые состоят игч многих регулирующих энергообъектов и в которых осуществляется регулирование (или ограничение) перетоков мощности по многим связям, анализ возможных режимных ситуаций и вызванных ими регули рующих воздействий становится трудно выполнимым. Некоторые ситуации могут быть упущены, в результате чего надежность и качество энергоснабжения будут снижены. Кроме того, устройство регулирования при таком подходе оказывается сложным, специфическим для различных энергосистем, а потому и дорогостоящим при его реализации. Наиболее близким к предлагаемому является устройство автоматического регулирования частоты и перетоков активной мощности в энергосистеме, содержащее блок телеизмерения регули руемых параметров, состоящий из датчика частоты, датчиков перетоков мощ ности и датчиков генерируемых мощностей, блок задатчиков уставок и коэффициентов влияния, состоящий из задатчиков уставок, генерируемых мощностей, перетоков мощности, частоты и коэффициентов влияния, и управляющий блок, связанный своим выходом через канал vпpaвлeния мощностью с регулирующими объектамиэне госистемы С 2 . Недостатком известного устройства является невозможность надежного и экономического регулирования в энергосистемах сложной конфигурации и большой размерности. Цель изобретения - повьшение надежности и экономичности при регулировании в энергосистемах сложной конфигурации и большой размерности. Поставленная цель достигается тем, что в устройстве автоматического регулирования частоты и перетоков активной мощности в энергосистеме, содержащем блок телеизмерения регулируемых параметров, блок задатчиков уставок и коэффициентов влияния и управляющий блок, связанный своим выходом через канал управления мощностью с регулирующими объектами энергосистемы, управляющий блок выполнен из блока корректирующих фильтров, блока вычитающих устройств блока умножителей, блока сумматоров, блока расчета фактических уставок и весовых коэффициентов, блока расчета коэффициентов долевого участия, при этом выходы задатчиков частоты и пер токов мощности блока телеизмерений присоединены к одним входам блока вычитающих устройств и блока расчета фактических уставок и весовых коэффициентов, к другому входу которого присоединены также выходы датчиков генерируемых мощностей блока телеизмерений, выходы задатчиков коэффициентов влияния блока задатчиков уставок и коэффициентов влияния присоединены к входу блока расчета коэффициентов долевого участия, а выходы задатчиков уставок генерируемых мощностей, перетоков мощности и частоты этого блока задатчиков присоединены к входу блока расчета фактических уставок и весовых коэффициентов, первый выход которого подключен к входу блока расчета коэффициентов долевого участия, а второй выход - к входу блока вычитающих устройств, связанного своим выходом с первым входом блока умножителей, второй вход которого подключен к выходу блока расчета коэффициентов долевого участия, а выход присоединен к входу блока сумматоров, причем выход последнего присоединен к входам блока расчета фактических уставок и весовых коэффициентов и блока корректирующих фильтров, выход которого является выходом блока в целом. При этом блок расчета фактических уставок и весовых коэффициентов содержит две группы блоков схем сравнения, входы которых являются входами блока расчета фактических уставок и весовых коэффициентов в целом, причем входы первой группы блоков схем сравнения подключены к выходам датчиков генерируемых мощностей блока телеизмерений регулируемых параметров, k выходам задатчиков уставок генерируемых мощностей блока задатчика уставок и коэффициентов влияния и к выходу блока сумматоров, входы второй группы блоков схем сравнения подключены к выходам датчиков частоты и перетоков мощности блока телеизмерений регулируемых параметров и к выходам задатчиков частоты и перетоков мощности блока задатчиков уставок и коэффициентов влияния, выходы первой группы блоков схем сравнения присоединены к входам первого дешифратора, выходы второй группы - к входам второго дешифратора, а выходы первого дешифратора присоединены к управляющем входам первого блока регистров, выходы второго дешифратора - к управляющим входам второго и третьего блоков perHcrpoS при этом информационные входы треть его блока регистров подключены к вы ходу блока задатчиков уставок н коэ44|ициентов влияния, а выходы этих регистров являются выходами блока в целом. . Кроме того, блок расчета коэффи™ циентов долевого участия содержит три блока умножения матриц,, блок сл жения матриц и инвертор матриЦд при чем первые входы первого и второго блоков умножения матриц подключены к выходам задатчиков коэффициентов влияния блока задатчика уставок и .коэффициентов влияния, второй вход первого блока умножения матриц подключен к выходу второго блока регис ров блока расчета фактических уставок и весовых коэффициентов, выход первого блока умножения матриц присоединен к вторым входам второго и третьего блоков умножения матриц, выход второго блока умножения матри присоединен к первому входу блока сложения матриц, второй вход которо го подключен к выходу первого блока регистров блока расчета фактических уставок и весовых коэ44 ициентов а выход 1C входу инвертора матриц,, при этом выход последнего подключен к первому входу третьего, блока умножения матриц3 выход которого является выходом блока расчета коэффициентов долевого участия в целом. На фиг, 1 изображена схема предлагаемого устройства; на фиг, 2 блок расчета фактических уставок и весовых коэффициентов5 на фиг. 3 блок расчета коэффициентов долевого участия; на фиг„ 4-8 - примеры ре-ализации первого ,цешифратора,, второ го дешифратора5 сумматора матриц, блока умножения матриц и инвертора матриц соответственно; на фиг, 9 схема энергосистемы. Устройство (фиг. 1) содержит соединенный с энергосистемой 1 блок 2 телеизмерений регулируемь х параметров, блок 3 задатчиков уставок и коэффициентов влияния. С энергосистемой 1 каналом 4 управления мощностью регулирующих объектов связан управляющий блок 5. Входы управляющ го блока 5 присоединены к выходам бл ка 2 телеизмерений регулируемых пар метров и блока 3 задатчнков уставок коэффициентов влияния. Блок 2 телеизмерений состоит из отдельны.х датчиков 2.1.1, 2. К2, 2,1,3,, частоты, регулируемых перетоков 2.2И, 2,2,2, ,,, генерируемых мощностей. Блок 3 задатчиков уставок и коэффициентов влияния состоит из отдельных задатчиков 3.1.1, 3.1.2 уставок по частоте, 3.1,3, 3.1„4, ... уставок по перетокам мощности, 3.2.1, 3,2.2, о , „ уставок по генерируемым мощностям, 3,3.1, 3.3.2, ... коэффициентов влияния. Множество выходов датчиков 2.1.1, 2„1.2, . будем назьшать первым выходом блока 2 телеизмерений, а множество выходов датчиков 2,2.1, 2.2.2, ,0, - вторым выходом этого блока. Аналогично, множество выходов задатчиков 3.1.1, 3.1о2, ..., 3.2.1, 3.2.2, ., буДем называть первым выходом блока 3 задатчиков уставок и коэффициентов влияния, а множество выходов задатчиков 3.3.1,3.3.2, ... - вторьгм Быходом этого блока. Управляющий блок 5 содержит блок 6 корректирующих фильтров 6.1, 6.2, ... выход которого является выходом управляющего блока 5 в целом, и блок 7 расчета фактических уставок и весовых коэффициентов, входы которого присоединены к двум выходам блока 2 телензмерений регулируемых параметров и к первому выходу блока 3 задатчиков уставок и коэффициентов влияния. Один выход блока 7 расчета фактических уставок и весовых коэффициентов присоединен к первому входу блока 8 расчета коэффициентов долевого участия, второй вход которого подключен к второму выходу блока 3 задатчиков уставок и коэффициентов влияния. Другой выход блока 7 расчета фактических уставок и весовых коэффициентов присоединен к первому входу блока 9 вычитателей, второй вход которого подключен к первому выходу блока 2 телеизмерений регулируемых параметров. Выходы блока 8 расчета коэффициентов долевого участия и блока 9 вычитателей подключены к входам блока 10 умножителей, выход которого присоединен к входу блока 11 сумматоров, связанного своим выходом с входами блока 6 корректирующих фильтров и блока 7 расчета фактических уставок и весовых коэффициентов. Блок 7 расчета фактических уставок к весовых коэффициентов (фиг, 2) содержит две группы блоков 17.1-12.6
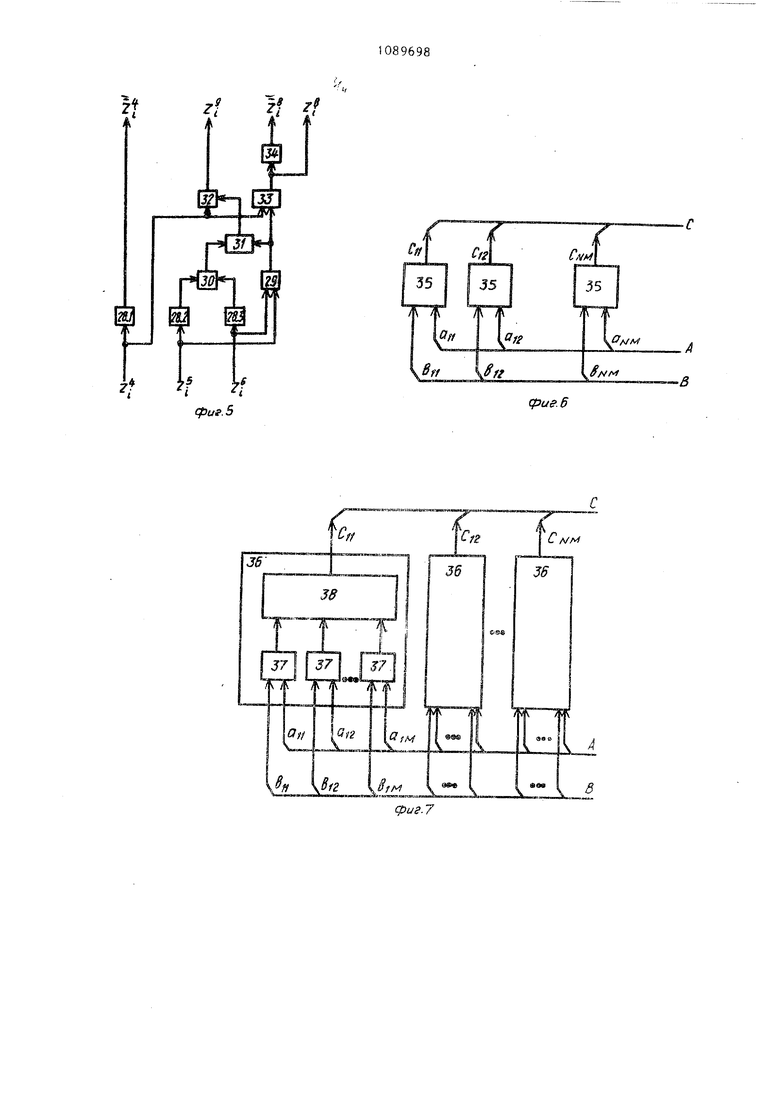
схем сравнения, входы которых являются входами блока расчета фактических уставок и весовых коэффициентов в целом и подключены к выходам блока 2 телеизмерений регулируемых параметров, блока 3 задатчиков уставок и Коэффициентов долевого участия, блока 11 сумматоров. При этом выходы первой группы блоков 12.1-12.3 схем сравнения присоединены к входам первого дешифратора 13, выходы второй группы блоков 12.4-12,6 - к входам второго дешифратора 14. Выходы первого дешифратора 13 присоединены к управляющим входам первого блока 15 регистров, выходы второго дешифрато.ра 14 - к управляющим входам второго 16 и третьего 17 блоков регистров. Информационные входы третьего блока 17 регистров подключены к выходу бло ка 3 задатчиков уставок и коэффициентов долевого участия. Выходы всех этих блоков 15-17 регистров являются выходами блока 7 расчета фактичес ких уставок и весовых коэффициентов в целом. Блок 8 расчета коэффициентов долевого участия (фиг. 3) содержит соединенные последовательно первый блок 18 умножения матриц, второй блок 19 умножения матриц, блок 20 сложения матриц, инвертор 21 матриц и третий блок 22 умножения матриц, выход которого является выходом блока 8 расчета коэффициентов долевого участия в целом. Первые входы первого 18 и второго 19 блоков умножения матриц подключены к выходу задатчика 3 уставок и коэффициентов влияния. Выход первого блока 18 умножения матриц присоединен к вторым входам второго 19 и третьего 22 блоков умножения матриц. Второй вход блока 20 сложения матриц подключен к выходу блока 7 расчета фактических уставок и весовых коэффициентов Второй вход первого блока 18 умножения матриц и второй вход блока 20 сложения матриц подключены к выходу блока 7 расчета фактических уставок и весовых коэффициентов. Первый дешифратор 13 (фиг. 4) состоит из нескольких однотипных блоко 13,1, 13.2, ..., число которых равно числу генерирующих электростанций. Схема каждого из таких блоков (фиг,4 содержит три элемента НЕ 23.1-23,3, входы которых объединены с входами трехвходового элемента И 24 и являют
ся входами блока в целом. Выходы элементов НЕ 23 подключены к входам элемента И 25, а выхода элементов И 24 и 25 присоединены к входам элемента ИЛИ 26. Выход последнего присоединен к входу элемента НЕ 27. Выходы элементов ИЛИ 26 и НЕ 27 являются выходами блока в целом.
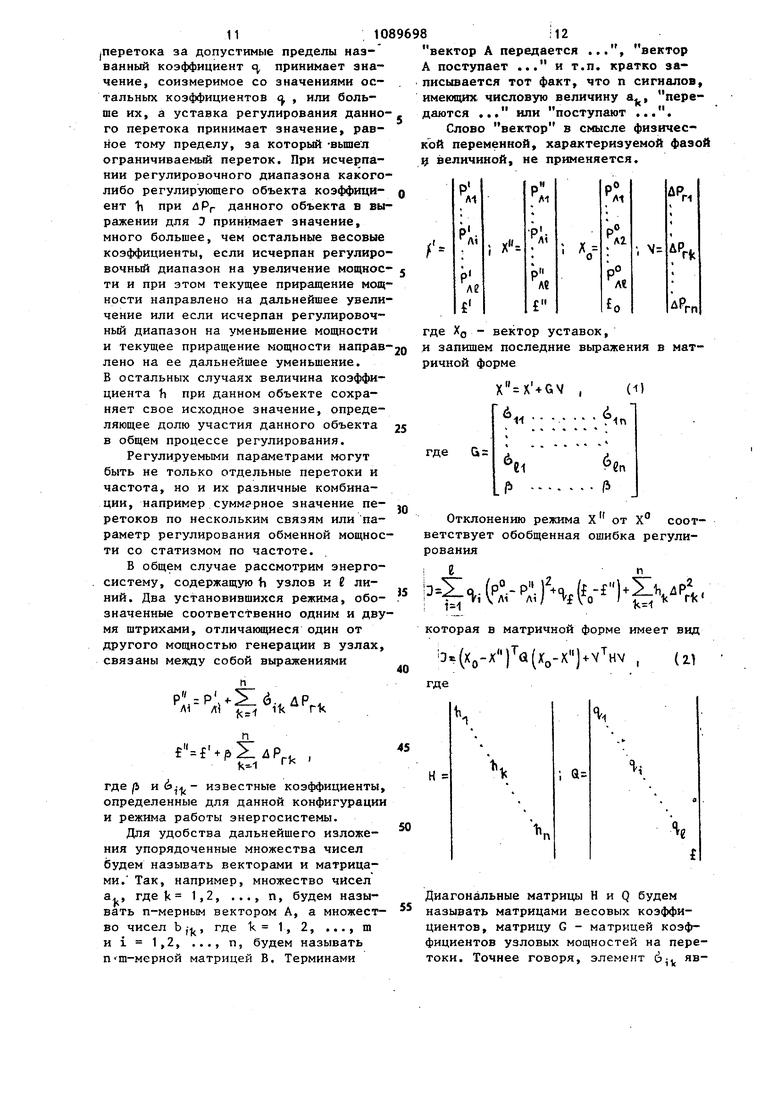
Второй дешифратор 14 (фиг. 5) состоит из нескольких однотипных блоков 14,1, 14,2, ..., число которых равно числу регулируемых параметров. Схемы каждого из таких блоков (фиг.5) содержит три элемента НЕ 28.1-28.3, входы которых являются входами блока в целом. При этом входы элементов НЕ 28,2 и 28,3 объединены с входами элемента И 29, а их выходы подключе ны к входам элемента И 30. Выходы элементов И 29 и 30 присоединены к входам элемента ИЛИ 31. Вход элемента НЕ 28,1 объединен с входами элементов И 32 и 33. Второй элемент И 32 присоединен к выходу элемента ИЛИ 31, а второй вход элемента И 33 присоединен к выходу элемента И 29, выход же элемента И 33 связан с входом элемента НЕ 34, Выходы элементов НЕ 28, И 32 и 33, НЕ 34 являются выходами блока в целом. Сумматор 20 матриц (фиг. 6) состоит из нескольких обычных сумматоров 35 чисел, Ка;кдын из блоков умножения матриц 18, 19 и 22 (фиг. 7) состоит из нескольких узлов 36, каждый из которых, в свою очередь, содержит несколько умножителей 37, подключенных своими входами к входам многовходового c TviMaTopa 38. Инвертор 21 матриц (фиг, 8) состоит из последовательно соединенных регистра 39, мультиплексора 40, накапливающего умножителя 14, инвертора 425 накапливающего сумматора 43. делителя 44, мультиплекстора 45 и регистра 46. Кроме того, выход накапливающего сумматора 43 подключен к входу регистра 17, выход которого соединен с вторьш входом делителя 44., Помимо этого, инвертор 21 матриц содержит генератор 48 тактовых импульсов, подключенный своим выходом к счетчику 49 адреса, связанному своим выходом с входом постоянного запоминающего устройства (ПЗУ) 50, выход которого присоединен к управляющим входам всех перечисленных узлов (кроме генератора 48 тактовых импульсов и сче1чика 49 адреса) . Принцип действия устройства иллю стрируется на примере системы регил рования перетоков активной мощности и частоты в энергосистеме, состояще из трех энергообъектов,соединенных ниями электропередач и работающих п раллельно. На фиг а 9 51-53 - энергообъекты; 54 - устройство регулиро вания частоты и перетоков активной мощности; Р , Pf-j , РГЗ Сенерируемые мощности; Рд , Рд2 перетоки м ности по межсистемным связям; f частота; 5 , 5 , 5 статизмы эне гообъектов. Регулируемыми параметрами являют частота и перетоки активной мощност Р и PI2 энергообъектами. Для установившегося режима работы этой энергосистемы приращения А переток генерируемых мощностей и частоты св заны уравнениями где 5 5 -f 5 + 5д . Введем в рассмотрение взвешенную квадратичную ошибку регулируемых параметров . : . и взвешенную квадратичную ошибку управляющих воздействий b . me % , 2 Я. Ь , h , ti, - весовые коэффициенты, Составим далее обобщенную ошибку регулирования и рассмотрим приращения генерируемых мощностей иР , &P , &Р , обеспечивающие минимум обобщенной ошибки 3 . В этом случае, если коэф фициенты h достаточно малы в сравнении с коэффициентами о, , то минимуму обобщенной ошибки J соответствует минимум ошибки регулируемых параметров Ел 5 нулевому значению т/ взвешенной квадратичной ошибки регулируемых параметров En соответствуют нулевые значения ошибо} с по каж дому регулируемому параметру; нулевому значению взвешенной квадратичной ошибки регулируемых параметров 8q соответствует нулевое значение взвешенной квадратичной ошибки управляющих воздействий о Таким образом, значения л Рр , полученные из условия минимума обобщенной ошибки регулирования D , могут быть использованы в каналах управления мощностью регулирующих объектов в качестве сигналов ошибок управляющих воздействий совершенно аналогично тому, как это делается в обычных одноконтурных системах регулирования по сигналу ошибки, т.е. через корректирующие фильтры поданы на исполнительные органы - регуляторы мощности энергообъектов. Структура и параметры корректирующих фильтров известным в автоматике образом выбираются в соответствии с динамическими характеристиками систем (например, в системах регулирования аналогичного назначения широко применяются так называемые фильтры пропорционально-интегрального регулирования). Относительные значения коэффициентов позволяют задавать степень участия того или иного регулирования параметра в общем режиме регулированиям если,, например, величину коэффициента,,, взять много меньше, чем величина коэффициентов о и с , то переток Р, регулироваться не будет. Аналогичным образом относительно значения коэффициентов tt определяют степень участия того или иного регулирующего объекта в процессе регулирования: если, например, ве,пичину коэффициента ti.. взять много больше, чем величина коэффициентов Ъ и h,, , то первый энергообъект пе будет принимать участия в работе регулятора. Управляя значениями коэффициентов с и Ь в зависимости от текущего состояния режима, можно решать целый ряд задач, в частности осуш.ествлять режим ограничения перетоков мощности ,по каким-либо связям и учитывать наличие регулировочных диапазонов на регулирующих объектах. ТаК; если регжим ограничения перетоков мощности заключается Б том, чтобы обеспечить текущее значение перетока в пределах некоторого диапазона,, заданного значениями верхнего и нижнего пределов на допзстимую величину перетока, то коэффициент с при этом перетоке в выражении для обобщенной ошибки J ,«,олжан быть pasHbLM нулю до тех пор, пока величина перетока иахо,г;ится в допусти -1ых пределах. При ныхпде |Перетока за допустимые пределы названный коэффициент ( принимает эна чение, соизмеримое со значениями остальных коэффициентов с , или больше их, а уставка регулирования данного перетока принимает значение, равное тому пределу, за который -вышел ограничиваемый переток. При исчерпании регулировочного диапазона какоголибо регулирующего объекта коэффициент h при uPf данного объекта в выражении для J принимает значение, много большее, чем остальные весовые коэффициенты, если исчерпан регулировочный диапазон на увеличение мощноети и при этом текущее приращение мощности направлено на дальнейшее увеличение или если исчерпан регулировочный диапазон на уменьшение мощности и текущее приращение мощности направлено на ее дальнейшее уменьшение. В остальных случаях величина коэффициента Ь при данном объекте сохраняет свое исходное значение, определяющее долю участия данного объекта в общем процессе регулирования. Регулируемыми параметрами могут быть не только отдельные перетоки и частота, но и их различные комбинации, например суммарное значение перетоков по нескольким связям или параметр регулирования обменной мощности со статизмом по частоте. В общем случае рассмотрим энергосистему, содержащую Ь узлов и t линий. Два установившихся режима, обозначенные соответственно одним и двумя штрихами, отличакмциеся один от другого мощностью генерации в узлах, связаны между собой выражениями Ar i /iHPrK
п
Чй1:
,
rk
где и - известные коэффициенты, определенные для данной конфигурации и режима работы энергосистемы.
Для удобства дальнейшего изложения упорядоченные множества чисел будем наэыва ть векторами и матрицами. Так, например, множество чисел а, где| 1,2п, будем называть п-мерным вектором А, а множество чисел Ь,-, где k 1, 2, ..., m и i 1,2, ..., n, будем называть ПШ-мерной матрицей В. Терминами 10
45
1
а
н
50
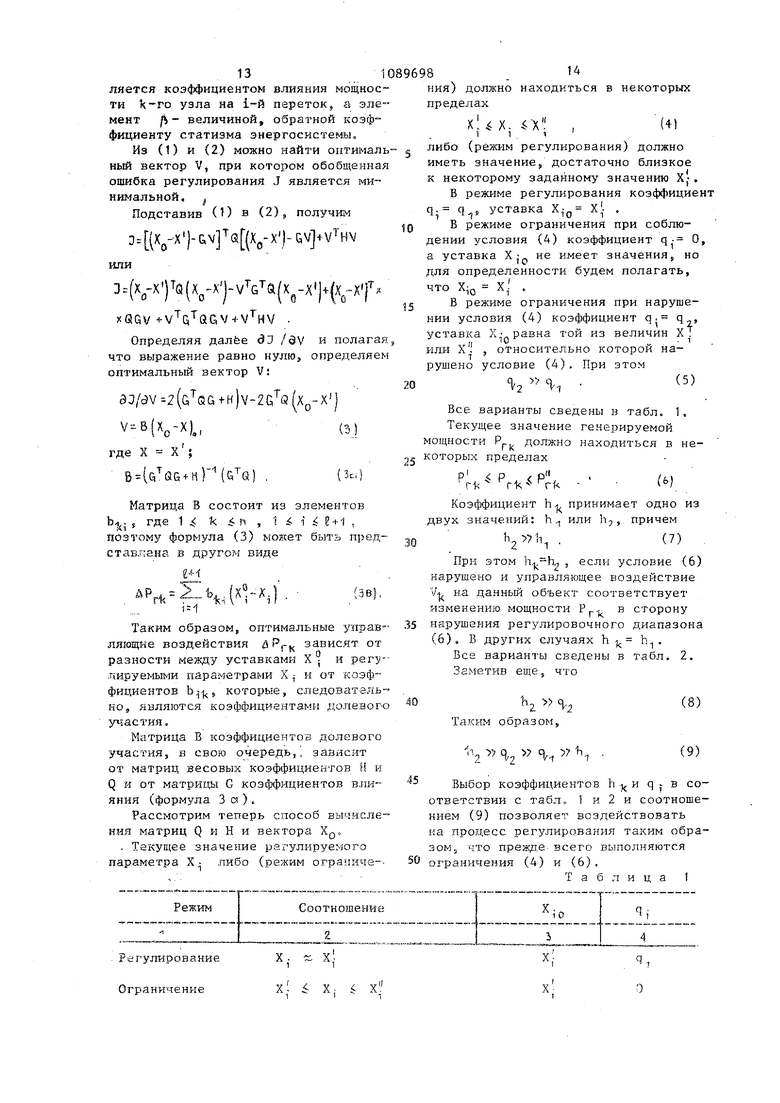
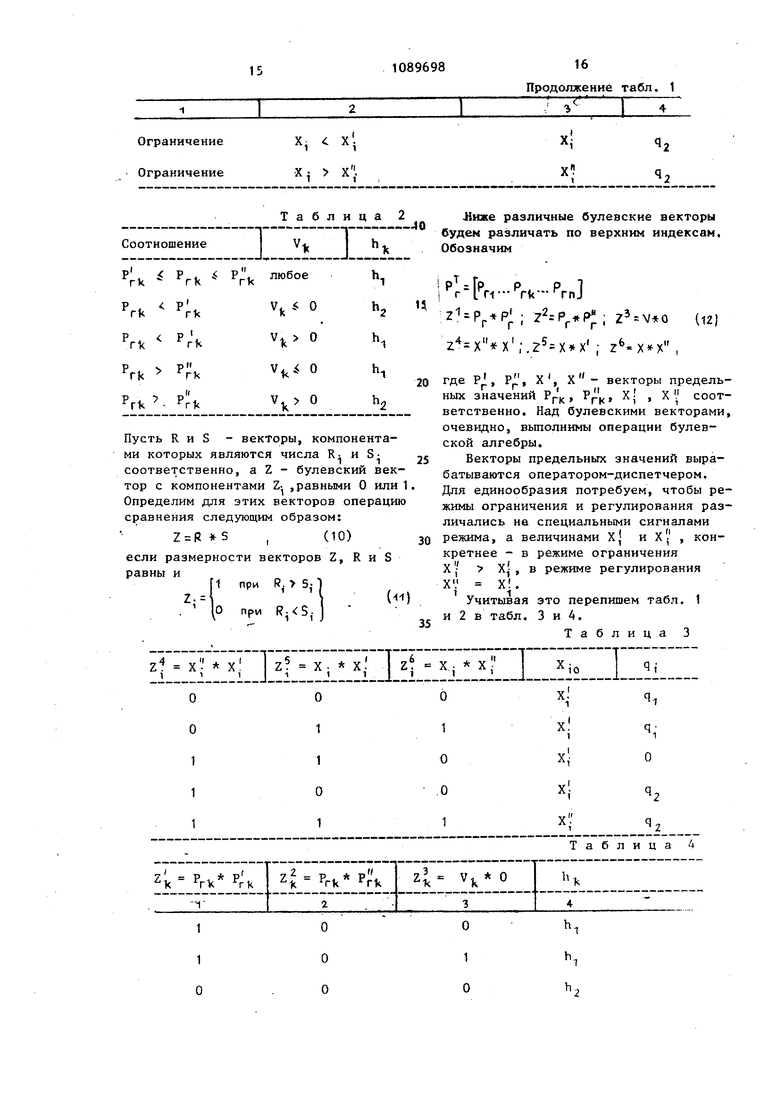
Диагональные матрицы Н и Q будем называть матрицами весовых коэффициентов, матрицу G - матрицей коэффициентов узловых мощностей на перетоки. Точнее говоря, элемент 6 яв12ti вектор А передается вектор А поступает ... и т.п. кратко записывается тот факт, что п сигналов. имеющих числовую величину а. , ... или поступают даются Слово вектор в смысле физической переменной, характеризуемой фазой величиной, не применяется. где Хд - вектор уставок, и запишем последние выражения в матричной форме + GV 6. где Q Отклонению режима x от X° соответствует обобщенная ошибка регулирования). которая в матричной форме имеет вид b(Xo-x)a( , (г 13 1 ляется коэффициентом влияния мощноети k-rc узла на i-й переток а элемент - величиной, обратной коэффициенту статизма энергосистемы, Из (1) и (2) можно найти оптималь ный вектор V, при котором обобщенная ошибка регулирования J является минимальной, Подставив (1) в (2), получим 0 (Xg-X)(Xj,-X)-GV tVHV 3.(vx)TQ()-vVa(.(vxr/ QGV -v QaGV4VHV . Определяя далее дЭ /dV и полагая что выражение равно нулю, определяем оптимальный вектор V: aa/dv ( tHJv-ZG Q ) .(Я где X х; B-() () . (3ci) Матрица В состоит из элементов где 14 п , 1 : 1 Ги , поэтому формула (3) может быть представлгна в другом виде . 4.W-M. Таким образом, оптимальные управляющие воздействия &Рр зависят от разности между уставками X и регу лируемыми параметрами Ж и от коэффициентов которые, следовательHOj являются коэффициентами долевого у-шстия. Матрица В коэффициентов долевого участия, в свою очередь, завясит от матриц весовых коэффициентов Н и Q и от матрицы G коэффициентов влн-яння (формула За), Рассмотрим теперь способ вычисления матриц Q и Н и вектора XQO Текущее значение регулируемого параметра Х- либо (режим . ,.: 8. 1 ния) должно находиться в некоторых пределах х X )( (4-) . I i / i либо (режим регулирования) должно иметь значение, достаточно близкое к некоторому заданному значению . В режиме регулирования коэффициент q 4-,, уставка . В режиме ограничения при соблюдении условия (4) коэффициент О, а уставка Х- не имеет значения но для определенности будем полагать, что XJ . Б режиме ограничения при нарушении условия (4) коэффициент q. q , уставка Х- равна той из величин ХТ или х , относительно которой нарушено условие (4), При этом % ) Все варианты сведены в табл. 1. Текущее значение генерируемой ощности Р должно находиться в неоторых пределах Prl.Pr1. - ). Коэффициент h принимает одно из двук значений: h или h,, причем ,(7) , При этом , если условие (6) нарушено и управляющее воздействие -| на данный объект соответствует изменению мощности V в сторону нарушения регулировочного диапазона (6). В других случаях h h . Все варианты сведены в табл. 2. Заметив еще, что 2 Таким образом, 2 2 1 Выбор коэффициентов h и q - в соответствии с табл,, 1 и 2 и соотношением (9) позволяет воздействовать ка процесс регулирования таким образоМз что прежд,е всего выполняются ограничения (4) и (6). Таблица
Пусть R и S - векторы, компонентами которых являются числа R. и S- j, соответственно, а Z - булевский вектор с компонентами Z- ,равными О или 1. Определим для этих векторов операцию сравнения следующим образом:
5 , (10) 30 если размерности векторов Z, R и S
равны и
1 при Р,.5Л Z. Ч (1)
(О при ,.
-35
О О
1
О
Продолжение табл. 1
очевидно, вьтолнимы операции булевской алгебры.
Векторы предельных значений вырабатываются оператором-диспетчером. Для единообразия потребуем, чтобы режимы ограничения и регулирования различались не специальными сигналами режима, а величинами XJ и X. , конкретнее - в режиме ограничения х- Х| , в режиме регулирования X. X.
Учитывая это перепишем табл. 1 и 2 в табл. 3 и 4.
Таблица 3
Таблица
о
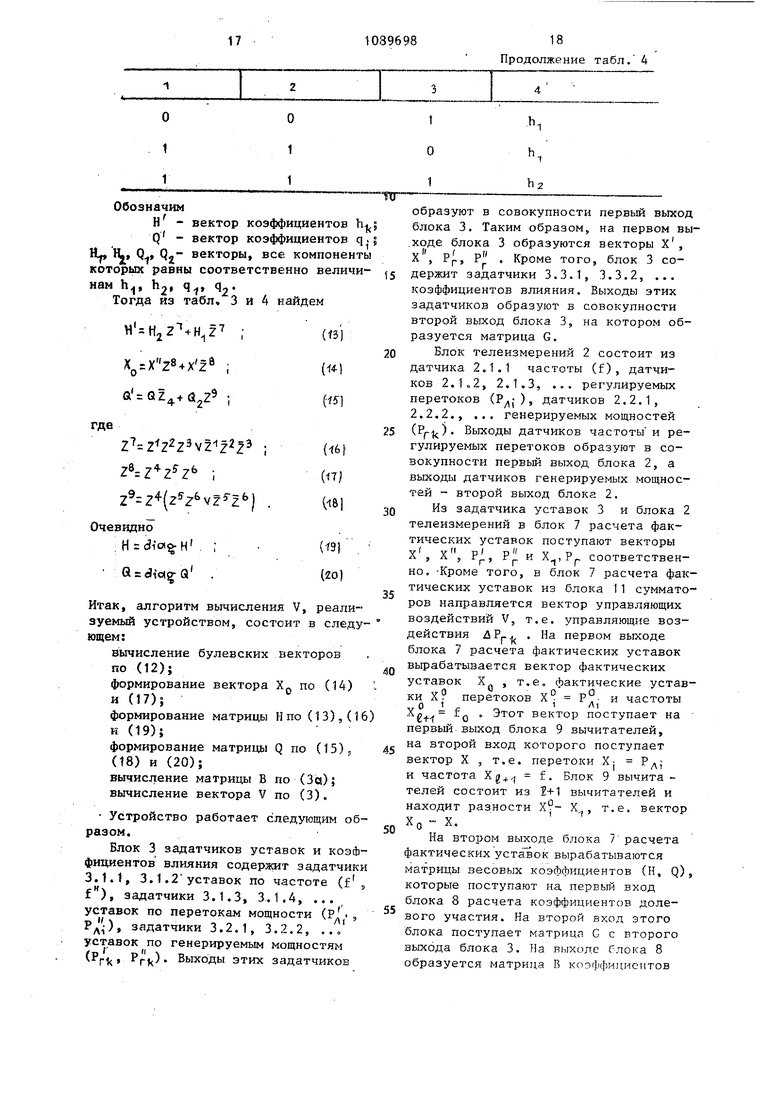
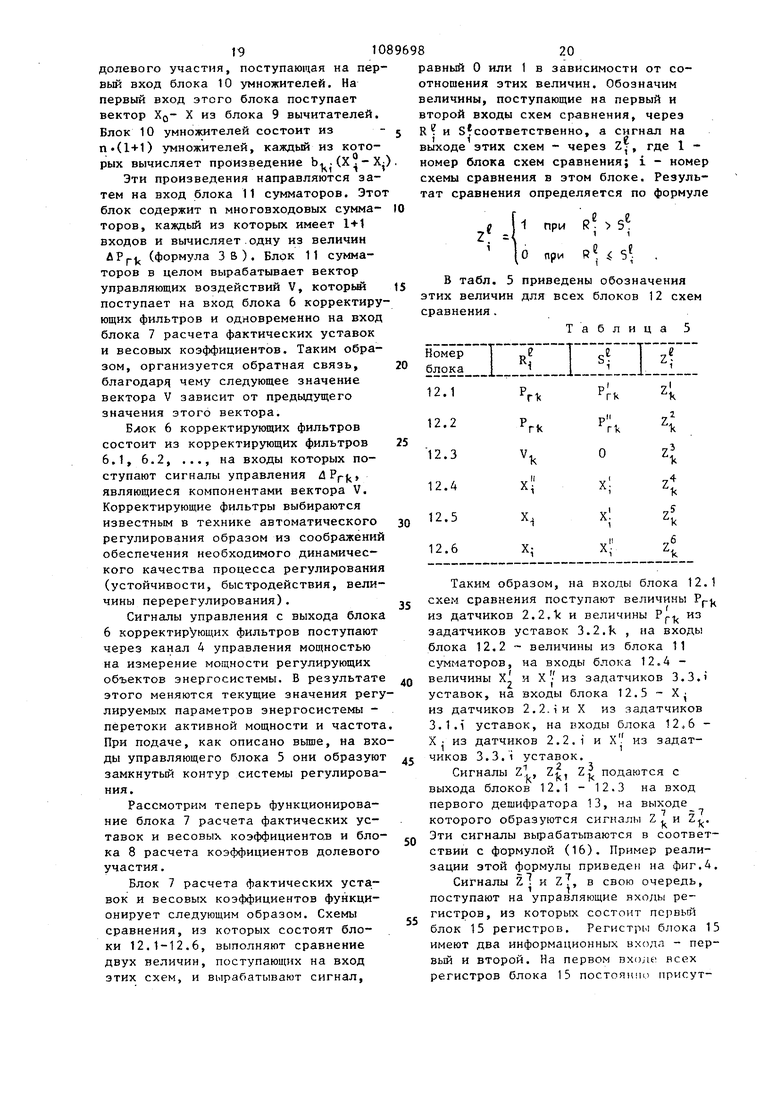
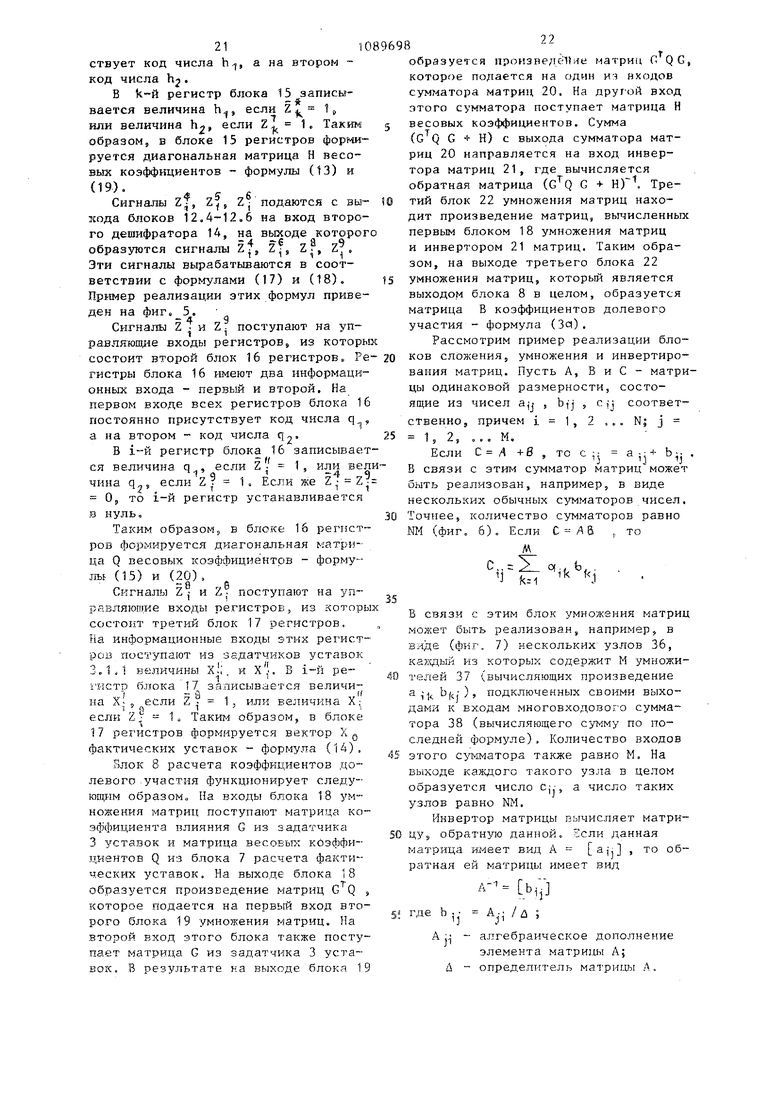
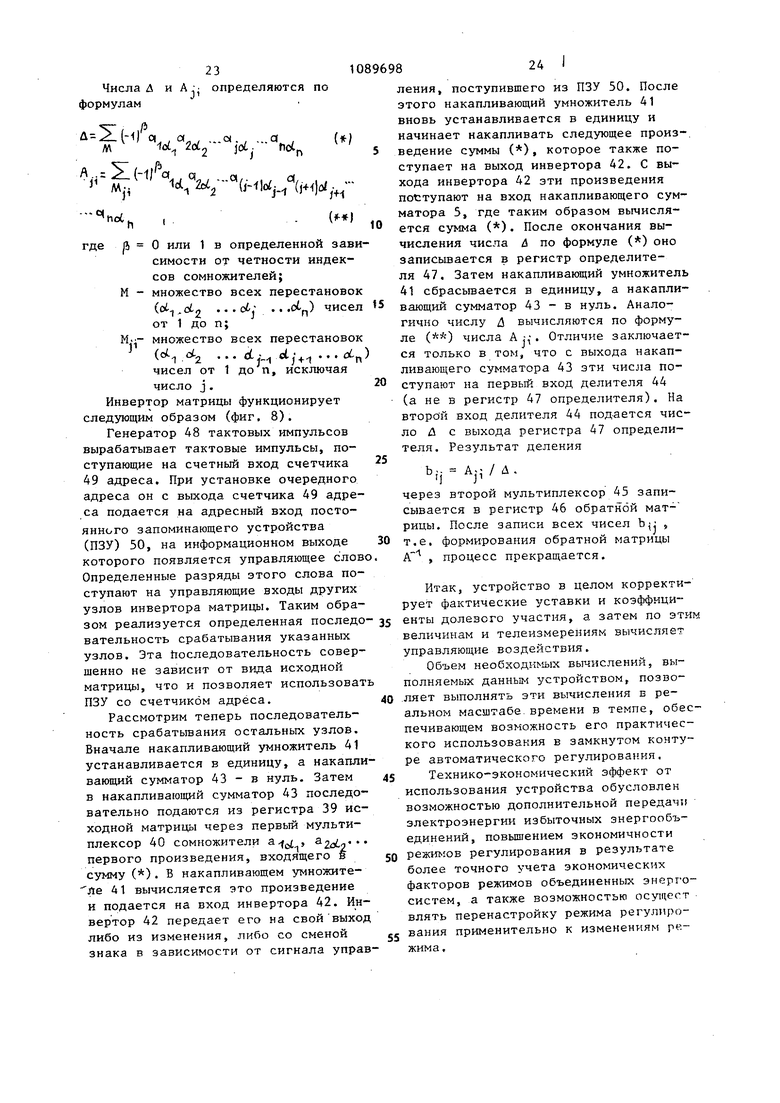
1 о .--- Обозначим Н - вектор коэффициентов Q - вектор коэффициентов Н« 1L, Q , Q,.- векторы, все компонен которых равны соответственно велич нам h, h2, q, q2. Тогда из табл, 3 и 4 найдем Н Н 2ФН 2 ; Xg X 284Xz i arQZ +fl Z ; . i ( . Очевидно H . ; Q dioig-a . Итак, алгоритм вычисления: V, реали зуемый устройством, состоит в след ющем: вычисление булевских векторов по (12)} формирование вектора Х по (14) и (17); формирование матрицы Н по (13),( и (19); формирование матрицы Q по (15), (18) и (20); вычисление матрицы Б по (За)| вычисление вектора V по (3). - Устройство работает следующим о разом. Блок 3 задатчиков уставок и коэ фициентов влияния содержит задатчи 3.1.1, 3.1.2 уставок по частоте (f f), задатчики 3.1.3, 3.1.4, ... уставок по перетокам мощности (Р. ), задатчики 3.2.1, 3.2.2, ../ уставок по генерируемым мощностям (Рр , Ppt;). Выходы этих задатчикоБ образуют в совокупности первьй выход блока 3. Таким образом, на первом вы.ходе блока 3 образуются векторы Х, х, Рр, Р . Кроме того, блок 3 содержит задатчики 3.3.1, 3.3.2, ... коэффициентов влияния. Выходы этих задатчиков образуют в совокупности второй выход блока 3, на котором образуется матрица G. Блок телеизмерений 2 состоит из датчика 2.1.1 частоты (f), датчиков 2.1.2, 2.1.3, ... регулируемых перетоков ( ), датчиков 2.2.1, 2.2.2., ... генерируемых мощностей (Рр). Выходы датчиков частотыи регулируемых перетоков образуют в совокупности первый выход блока 2, а выходы датчиков генерируе1-1ых мощностей - второй выход блока 2, Из задатчика уставок 3 и блока 2 телеизмерений в блок 7 расчета фактических уставок поступают векторы Х, х, Р, Р и Х,Рр соответственно. -Кроме того, в блок 7 расчета фактических уставок из блока 11 сумматоров направляется вектор управляющих воздействий V, т.е. управляющие воздействия ЛРр . На первом выходе блока 7 расчета фактических уставок вьфабатывается вектор фактических уставок X,, , т.е. фактические уставки X перетоков Х° и частоты Хй Q . Этот вектор поступает на первьй выход блока 9 вычитателей, на второй вход которого поступает вектор X 5 т.е. перетоки Х: Рд и частота Xg f. Блок 9 вычита телей состоит из 2+1 вычитателей и находит разности Х9- х , т.е. вектор XQ - X, На втором выходе блока 7 расчета фактических уставок вырабатываются матрицы весовых коэффициентов (Н, Q), которые поступают на первый вход блока 8 расчета коэффициентов долевого участия. На второй вход этого блока поступает матрица G с второго выхода блока 3. На выходе блока 8 образуется матрица В кс1эффи11исптов долевого участия, поступающая на пер вый вход блока 10 умножителей. На первый вход этого блока поступает вектор XQ- X из блока 9 вычитателей. Блок 10 умножителей состоит из п«(1+1) умножителей, каждый из которых вычисляет произведение Ь.(Х.-Х Эти произведения направляются затем на вход блока 11 сумматоров. Это блок содержит п многовходовых сумматоров, каждый из которых имеет 1+1 входов и вычисляет.одну из величин ДРр (формула ЗВ). Блок 11 сумматоров в целом вырабатывает вектор управляющих воздействий V, KOTOpt поступает на вход блока 6 корректиру ющих фильтров и одновременно на вход блока 7 расчета фактических уставок и весовых коэффициентов. Таким образом, организуется обратная связь, благодаря чему следующее значение вектора V зависит от предыдущего значения этого вектора. Елок 6 корректирующих фильтров состоит из корректирующих фильтров 6.1, 6.2, ..., на входы которых поступают сигналы управления /iPf-j, являющиеся компонентами вектора V. Корректирующие фильтры выбираются известным в технике автоматического регулирования образом из соображений обеспечения необходимого динамического качества процесса регулирования (устойчивости, быстродействия, величины перерегулирования). Сигналы управления с выхода блока 6 корректирующих фильтров поступают через канал 4 управления мощностью на измерение мощности регулирующих объектов энергосистемы. В результате этого меняются текущие значения регу лируемых параметров энергосистемы перетоки активной мощности и частота При подаче, как описано выше, на вхо ды управляющего блока 5 они образуют замкнутый контур системы регулирования. Рассмотрим теперь функционирование блока 7 расчета фактических уставок и весовых коэффициентов и блока 8 расчета коэффициентов долевого участия. Блок 7 расчета фактических уставок и весовых коэффициентов функционирует следующим образом. Схемы сравнения, из которых состоят блоки 12.1-12.6, выполняют сравнение двух величин, поступающих на вход этих схем, и вырабатывают сигнал. 1 20 авный О или 1 в зависимости от сотношения этих величин. Обозначим еличины, поступающие на первый и торой входы схем сравнения, через и 8 соответственно, а сигнал на ыходе этих схем - через Z, где омер блока схем сравнения; i - номер хемы сравнения в этом блоке. Резульат сравнения определяется по формуле при к -j в табл. 5 приведены обозначения тих величин для всех блоков 12 схем равнения . Таблица 5 Таким образом, на входы блока 12.1 схем сравнения поступают величины из датчиков 2.2,1 и величины Р,, из Г1 задатчиков уставок 3.2.К , на входы блока 12.2 величины из блока 11 сумматоров, на входы блока 12.4 величины х и X из задатчиков 3.3. уставок, на входы блока 12.5 Х из датчиков 2.2.iH X из задатчиков 3.1.1 уставок, на входы блока и х. из задатX из датчиков 2.2.i 3.3.1 уставок. чиков ., Z, Z подаются с Сигналы Z блоков 12.1 - 12.3 на вход выхода первого дешифратора 13, на выходе которого образуются сигналы Z . и Z. Эти сигналы вьфабатываются в соответствии с формулой (16). Пример реализации этой формулы приведен на фиг.4. Сигналы Z . и zT, в свою очередь, поступают на управляющие входы регистров, из которых состоит первый блок 15 регистров. Регистры блока 15 имеют два информационных входа - первый и второй. На первом входе всех регистров блока 15 постоянно нрисутствует код числа h-|, а на втором код числа hj, В К-й регистр блока 15 записывается величина h если 2,4. К ИЛИ величина h, если Z. 1, Таким образом, в блоке 15 регистров формируется диагональная матрица Н весовых коэффициентов - формулы (13) и Сигналы Zj, Zj, Zj подаются с выхода блоков 12,4-12,6 на вход второго дешифратора 14, на выходе которог образуются сигналы Z, Z. Эти сигналы вьфабатьшаются в соответствии с формулами (17) и (18). nps-iMep реализации этих формул приведен на фигв 5, Сигналы Z . и Z. поступают на управляющие входы регистров, из которы состоит второй блок 16 регистров,, Ре гистры блока 16 имеют два информационных входа - первый и второй. На первом входе всех регистров блока 1 постоянно присутствует код числа q а на втором - код числа С)2 16 записывает В 1-й регистр блока .,, если z/ 15 или вед ся величина q. Z Z чина q, если Z; 1. Если же , 0, то i-й регистр устанавливается Таким образом,, в блоке 16 регистров формируется диагональная матрица Q весовых коэффициентов - форму-л-ьь (15) и (20) . Сигналы Zj и Z; поступают на З равлягошие входы регистровj из которы состоит третий блок 17 регистров.. На информационные входы этих регистзадатчиков уставок ров поступают из к . /t . .. З.Ы величины . к х. В i-й iKCTD блока 17 записывается величи1, или Е еличина X; Zb 1 Такиг образом, в блоке 17 регистров формируется вектор Х фактических уставок - формула (14). Блок 8 расчета коэффициентов долевого участия функционирует следующим образоМа На входы блока 18 змножения матриц поступают матрица коэффициента влияния G из эадатчика 3 уставок и матрица весовых кОэффи11,иентов Q из блока 7 расчета фактических уставок. На выходе блока 18 образуется произведение матриц которое подается на первый вход второго блока 19 умножения матриц. На второй вход этого блока также поступает матрица G из задатчика 3 уставок. В результате ка выходе блока 19 1 образуется произведеЧЬте матриц G QC, которое подается на один из нходов сумматора матриц 20, На друтой вход зтого сумматора поступает матрица Н весовых коэффициентов. Сумма (G Q G Н) с выхода сумматора матриц 20 направляется на вход инвертора матриц 21, где вычисляется обратная матрица (G Q G Н) . Третий блок 22 умножения матриц находит произведение матриц, вычисленных первым блоком 18 умножения матриц и инвертором 21 матриц. Таким образом, на выходе третьего блока 22 умножения матриц, которьй является выходом блока 8 в целом, образуется матрица В коэффициентов долевого участия - формула (30), Рассмотрим пример реализации блоков сложения, умножения и инвертирования матриц. Пусть А, В и С - матрицы одинаковой размерности, состоящие из чисел соответN; j ственно, причем i Ь 2, ,.. М. ЕСЛИ +6 , то с а;;+ ii В связи с этим сумматор матриц может быть реализован, например, в виде нескольких обычных с мматоров чисел. Точнее, количество сумматоров равно NM (фиг. 6). Если С.. J k--l В связи с этим блок умножения матриц может быть реализован, например, в виде (фкг. 7) нескольких узлов 36, каясдый из которых содержит М умножи1елей 37 (вычисляющих произведение i1 подключенных своими выходами к входам многовходового сумматора 38 (вычисляющего по последней формуле). Количество входов этого С мматора также равно М, На выходе кажд.ого такого узла в целом образуется число с,-., а число таких узлов равно NM, Инвертор матрицы вычисляет матрицУв обратную данной о Если данная матрица шмеет вид А о обратная ей матрицы имеет вид А- где h -алгебраическое дополнение элемента матриш 1 А; -определитель матрицы А. 23 Числа Д и А определяются по формулам д-ХнЛ ot zotj А,. (-Л ici,--G4W,.HH,W где |1 О или 1 в определенной зав симости от четности индексов сомножителей; М - множество всех перестаново (ot , .. . d .. .,) чисе от 1 до п; множество всех перестаново J /-, 1 -2 j-t-i чисел от 1 до п, исключая число j. Инвертор матрицы функционирует следующим образом (фиг. 8). Генератор 48 тактовых импульсов вырабатывает тактовые импульсы, поступающие на счетный вход счетчика 49 адреса. При установке очередного адреса он с выхода счетчика 49 адре са подается на адресный вход постоянного запоминающего устройства (ПЗУ) 50, на информационном выходе которого появляется управляющее слов Определенные разряды этого слова поступают на управляющие входы других узлов инвертора матрицы. Таким образом реализуется определенная последо вательность срабатывания указанных узлов. Эта последовательность совершенно не зависит от вида исходной матрицы, что и позволяет использоват ПЗУ со счетчиком адреса. Рассмотрим теперь последовательность срабатывания остальных узлов. Вначале накапливающий умножитель 41 устанавливается в единицу, а накапли вающий сумматор 43 - в нуль. Затем в накапливающий сумматор 43 последовательно подаются из регистра 39 исходной матрицы через первый мультиплексор 40 сомножители а, , Zoto первого произведения, входящего в сумму () . В накапливающем умножитеЛе 41 вычисляется это произведение и подается на вход инвертора 42. Инвертор 42 передает его на свойвыход либо из изменения, либо со сменой знака в зависимости от сигнала упра 1 824 I ления, поступившего из ПЗУ 50. После этого накапливающий умножитель 41 вновь устанавливается в единицу и начинает накапливать следующее произ-. ведение суммы (), которое также поступает на выход инвертора 42. С выхода инвертора 42 эти произведения поступают на вход накапливающего сумматора 5, где таким образом вычисляется сумма (). После окончания вычисления числа /S по формуле () оно записывается в регистр определителя 47. Затем накапливакмций умножитель 41 сбрасывается в единицу, а накапливающий сумматор 43 - в нуль. Аналогично числу Л вычисляются по формуле () числа А . Отличие заключается только в том, что с выхода накапливающего сумматора 43 эти числа поступают на первый вход делителя 44 (а не в регистр 47 определителя). На второй вход делителя 44 подается число Л с выхода регистра 47 определителя. Результат деления bj. А-. /Д. через второй мультиплексор 45 записывается в регистр 46 обратной матрицы. После записи всех чисел , т.е. формирования обратной матрицы , процесс прекращается. Итак, устройство в целом корректирует фактические уставки и коэффициенты долевого участия, а затем по этим величинам и телеизмерениям вычисляет управляющие воздействия. Объем необходимых вычислений, выполняемых данным устройством, позволяет выполнять эти вычисления в реальном масштабе,времени в темпе, обеспечивающем возможность его практического использования в замкнутом контуре автоматического регулирования. Технико-экономический эффект от использования устройства обусловлен возможностью дополнительной передачи электроэнергии избыточных знергообъединений, повышением экономичности режимов регулирования в результате более точного учета экономических факторов режимов объединенных энергосистем, а также возможностью осущегт влять перенастройку режима регулирования применительно к изменениям режима.
r
/-х.
Al22
22
2М.
$
(Риг.2
фие.З
фиеА
г/ /f
А
П
cpuf.S
Cff
Cffl
CfA
C,Vf4
В
дуие.6
С,г
с нм
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU545038A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического регулирования частоты и активной мощности энергообъединения | 1974 |
|
SU556535A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
