Изобретение относится к контрольноизмерительной аппаратуре и предназначено для автоматического контроля радиального и азимутального положения магнитной головки (МГ) в накопителе на гибком магнитном диске (НГМД) по настроечному гибкому магнитному диску (ГМД).
Цель изобретения - повыщение точности и производительности за счет автоматизации контроля положения МГ.,
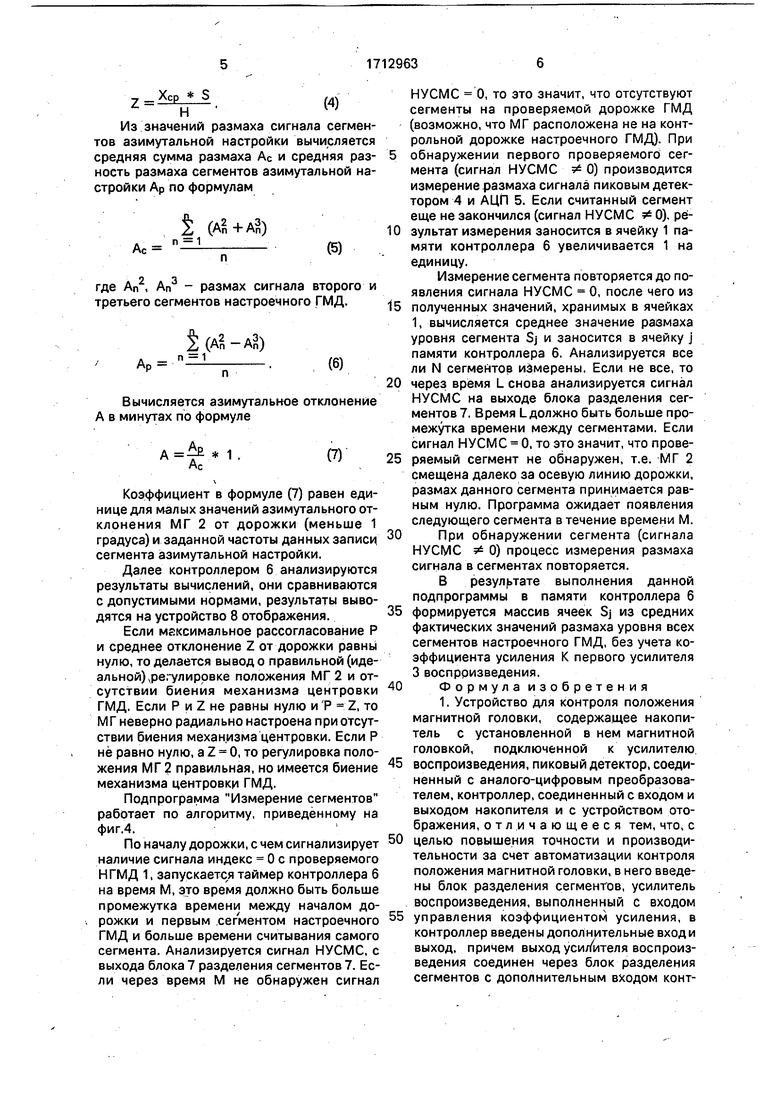
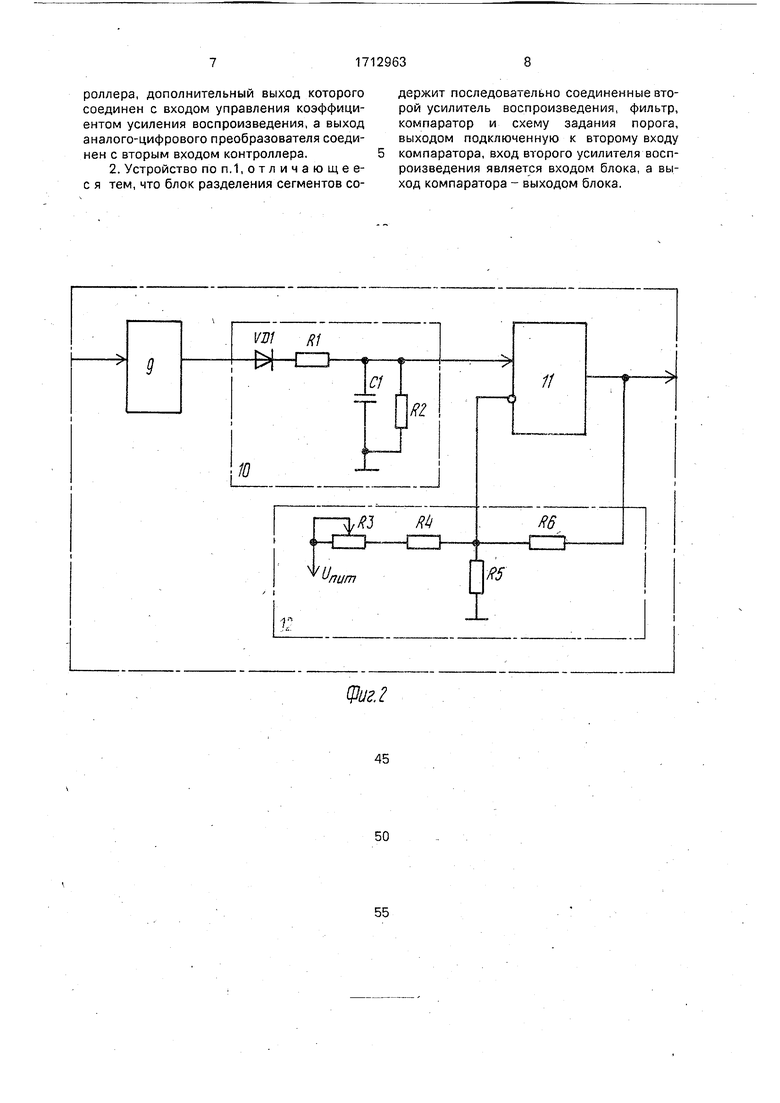
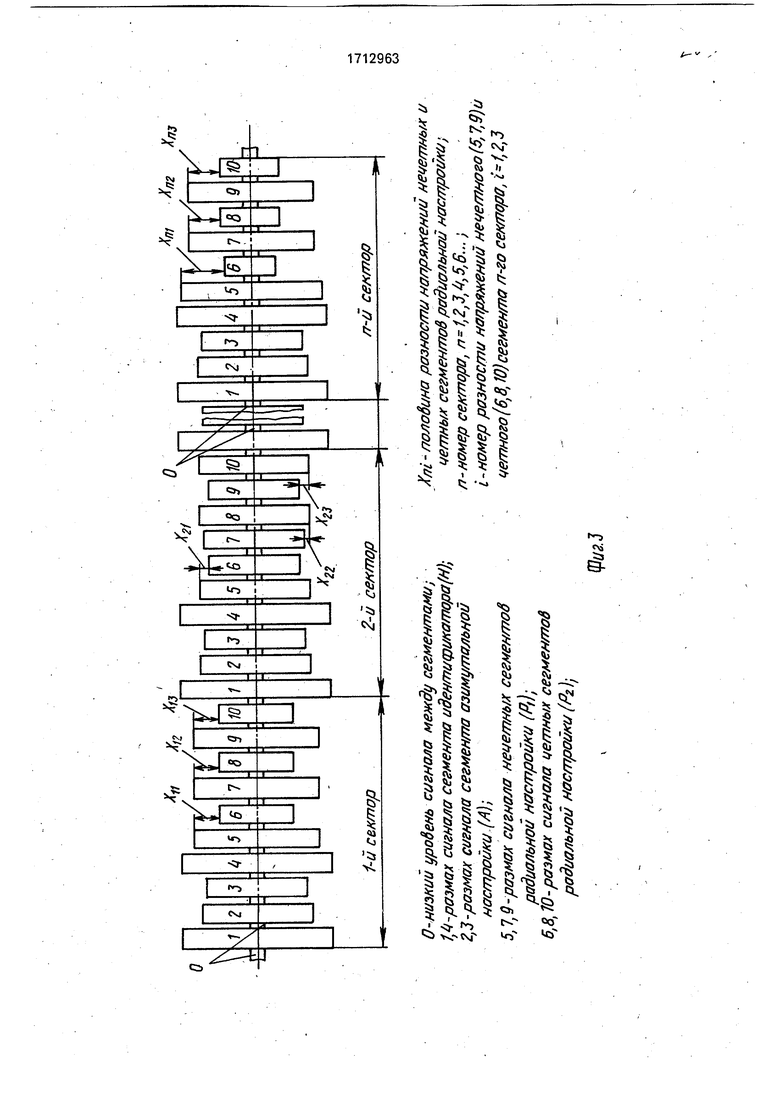
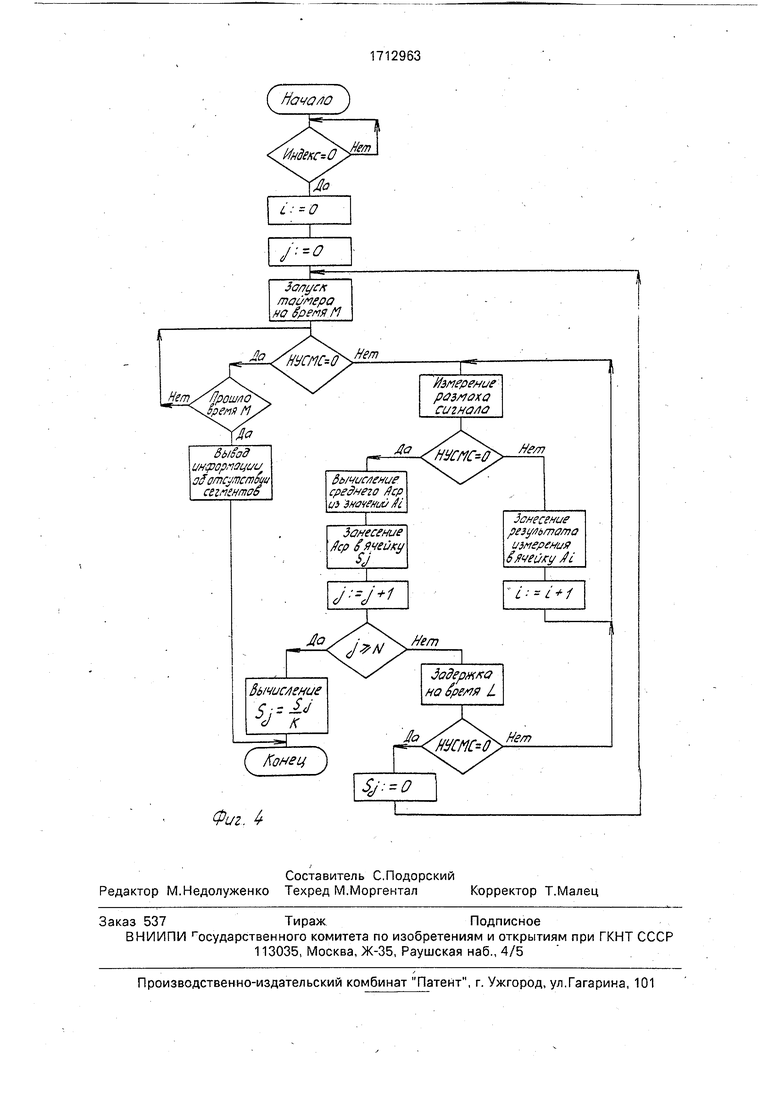
На фиг.1 изображена структурная схема устройства; на фиг.2 -схема блока разделения сегментов; на фиг.З - осциллограмма сигналов с настроечного ГМД; на фиг.4 алгоритм подпрограммы Измерение сегментов.
Устройство содержит проверяемый НГМД 1 с установленной в нем МГ 2, к которой подключены соединенные последовательно усилитель 3 воспроизведения, пиковый детектор 4, аналого-цифровой преобразователь (АЦП) 5 и контроллер 6, выход усилителя 3 воспроизведения соединен с блоком 7 раз;а1еления сегментов, выход которого подключен к контроллеру 6, соединенному с входом и выходом НГМД 1 и входом устройства 8 отображения, второй вход усилителя 3 воспроизведения соединен с выходом контроллера 6.
Блок 7 разделения сегментов предназначен для выделения низкого уровня сигнала между сегментами и содержит последовательно соединенные второй усилитель 9 воспроизведения, фильтр 10, компаратор 11 и схему 12 задания порога, выходом подключенную к второму входу компаратора 11.
В качестве настроечного ГМД выбирается настрозчный ГМД, отличающийся от известных настроечных дисков расположением информации на дорожке, по которой определяется радиальное и азимутальное положение МГ. Сегменты данного ГМД записаны не сплошь (не неразрывно), а между ними имеются короткие участки с незаписанной информацией, что облегчает распознавание сегментов при просмотре на экране осциллографа и обнаружение сегментов в предлагаемом устройстве, устраняет зависимость от скорости вращения ГМД в НГМД.
Работа устройства производится под управлением программы, расположенной в Ьамяти контроллера. Первоначально в проверяемый НГДМ устанавливается настроечный ГМД и под управлением контроллера 6 осуществляется позиционирование МГ 2 проверяемого НГМД 1 на дорожку 00, затем на дорожку, на которой записана контрольная информация. Сигнал с МГ 2 (фиг.З) поступает на вход усилителя 3 воспроизведения.
В зависимости от размаха сигнала на входе первого усилителя 3 воспроизведения, поступающего через пиковый детектор 4 и АЦП 5 в контроллер 6, контроллер 6 задает необхбдимь й коэффициент усиления К первого усилителя 3 воспроизведения.
После чего выполняется подпрограмма Измерение сегментов, в которой осуществляется измерение размаха сигнала каждого сегмента настроечного ГМД (см. фиг.4) и занесение результатов в память контроллера 6.
Под управлением контроллера 6 из памяти выбираются значения размаха сегментов 1 и 4 (см. фиг.З) всех секторов и вычисляется средний размах идентификатора Н по формуле
S (ни НИ)
п 1
(1)
2 п
где Нп Нп - размах сигнала первого и четвертого сегментов настроечного ГМД;
п - число секторов п 1,2,3,4,5п.
Из сегментов радиальной настройки Xni (см. фиг.З) всех секторов выбирается максимальное по модулю значение Хмакс вычисляется максимальное рассогласование Р по формуле
Хмакс S
(2)
Р
Н
где S - ширина сердечника проверяемой МГ, мкм.
Знак у максимального значения Хмакс характеризует направление, в котором смещено радиальное положение МГ 2 относительно оси дорожки.
Вычисляется средний размах радиальной настройки Хср по формуле
Si
Xni
п 1 i 1
(3)
n
где Xni - половина разности напряжений нечетных и четных сегментов радиальной настройки;
i - номер разности напряжений нечетного (5,7,9) и четного (6,8,10) сегмента п-ого сектора i 1,2,3.
Вычисляется среднее отклонение от дорожки Z по формуле
Хср S
(4)
7 Н
Из Означений размаха сигнала сегментов азимутальной настройки вычисляется средняя сумма размаха Ас и средняя разность размаха сегментов азимутальной настройки Ар по формулам
i: ()
(5)
Ас
где АП, АП - размах сигнала второго и третьего сегментов настроечного ГМД.
()
п - 1
(6)
Ап
Вычисляется азимутальное отклонение А в минутах по формуле
(7) АС
Коэффициент в формуле (7) равен единице для малых значений азимутального отклонения МГ 2 от дорожки (меньше 1 градуса) и заданной частоты данных записи сегмента азимутальной настройки.
Далее контроллером 6 анализируются результаты вычислений, они сравниваются с допустимыми нормами, результаты выводятся на устройство 8 отображения.
Если максимальное рассогласование Р и среднее отклонение Z от дорожки равнь) нулю, то делается вывод о правильной (идеальной) ре.улиррвке положения МГ 2 и отсутствии биения механизма центровки ГМД. Если Р и Z не равны нулю и Р 2, то М Г неверно радиально настроена при отсутствии биения механизма центровки. Если Р не равно нулю, а Z О, то регулировка положения МГ2 правильная, но имеется биение механизма центровки ГМД.
Подпрограмма Измерение сегментов работает по алгоритму, приведенному на фиг.4.
По началу дорожки, с чем сигнализирует наличие сигнала индекс О с проверяемого НГМД 1, запускается таймер контроллера 6 на время М, 3jo время должно быть больше промежутка времени между началом дорожки и первым .сегментом настроечного ГМД и больше времени считывания самого сегмента. Анализируется сигнал НУСМС, с выхода блока 7 разделения сегментов 7. Если через время М не обнаружен сигнал
НУСМС 0, то это значит, что отсутствуют сегменты на проверяемой дорожке ГМД (возможно, что МГ расположена не на контрольной дорожке настроечного ГМД). При
обнаружении первого проверяемого сегмента (сигнал НУСМС 0) производится измерение размаха сигнала пиковым детектором 4 и АЦП 5. Если считанный сегмент еще не закончился (сигнал НУСМС 0), рёзультат измерения заносится в ячейку 1 памяти контроллера 6 увеличивается 1 на единицу.
Измерение сегмента повторяется до появления сигнала НУСМС О, после чего из
полученных значений, хранимых в ячейках 1, вычисляется среднее значение размаха уровня сегмента Sj и заносится в ячейку j памяти контроллера 6. Анализируется все ли N сегментов измерены. Если не все, то
через время L снова анализируется сигнал НУСМС на выходе блока разделения сегментов 7. Время L должно быть больше промежутка времени между сегментами. Если сигнал НУСМС О, то это значит, что проверяемый сегмент не обнаружен, т.е. МГ 2 смещена далеко за осевую линию дорожки, размах данного сегмента принимается равным нулю. Программа ожидает появления следующего сегмента в течение времени М.
При обнаружении сегмента (сигнала НУСМС 5 0) процесс измерения размаха сигнала в сегментах повторяется.
В результате выполнения данной подпрограммы в памяти контроллера 6
формируется массив ячеек Sj из средних фактических значений размаха уровня всех сегментов настроечного ГМД, без учета коэффициента усиления К первого усилителя 3 воспроизведения.
Формула изобретения
1. Устройство для контроля положения магнитной головки, содержащее накопитель с установленной в нем магнитной головкой, подключенной к усилителю
воспроизведения, пиковый детектор, соединенный с аналого-цифровым преобразователем, контроллер, соединенный с входом и выходом накопителя и с устройством отображения, отличающееся тем, что, с
целью повышения точности и производительности за счет автоматизации контроля положения магнитной головки, в него введены блок разделения сегментов, усилитель воспроизведения, выполненный с входом
управления коэффициентом усиления, в контроллер введены дополнительные входи выход, причем выход уси;4|теля воспроизведения соединен через блок разделения сегментов с дополнительным входом контроллера, дополнительный выход которого соединен с входом управления коэффициентом усиления воспроизведения, а выход аналого-цифрового преобразователя соединен с вторым входом контроллера.
2. Устройство по П.1, о т л и ч а ю щ е ес я тем, что блок разделения сегментов содержит последовательно соединенные второй усилитель воспроизведения, фильтр, компаратор и схему задания порога, выходом подключенную к второму входу компаратора, вход второго усилителя воспроизведения является входом блока, а выход компаратора - выходом блока.
Изобретение относится к контрольно- измерительной аппаратуре и может быть ис- пользовано для контроля положения магнитной головки (МГ) в накопителях на гибких магнитных дисках, и позволяет повысить производительность и точность контроля за счет обнаружения и измеренияразмаха сигнала всех сегментов настроечного диска, автоматизированного выполнения необходимых расчетов, вывода результатов. Устройство содержит накопитель с установленными в нем настроечными диском и МГ, обработка сигнала с которых производится последовательно соединенными первым усилителем 3 воспроизведения, пиковым детектором 4, аналого-цифровым преобразователем 5, контроллером 6 и устройством 8 отображения. В устройство введен дополнительно блок 7 разделения сегментов, подключенный входом к выходу первого усилителя 3 воспроизведения, а выходом ко входу контроллера ,6, состоящий из второго усилителя воспроизведения, фильтра, компаратора и схемы задания порога. Этот блок позволяет разделять сегменты при колебаниях скорости вращения настроечного диска. 1 з.п. ф- лы,4ил.(ЛС1Ю iOс>&00>&
te
f
| Авторское свидетельство СССР № 1334990, кл | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
