ч
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СПИРЯКОВА | 1991 |
|
RU2042254C1 |
| ЭЛЕКТРОТЕХНИЧЕСКИЙ КОМПЛЕКС ПОРШНЕВОГО КОМПРЕССОРА НА ОСНОВЕ ЛИНЕЙНОЙ МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2019 |
|
RU2720882C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| ЛИНЕЙНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2023 |
|
RU2810637C1 |
| Устройство для создания струи | 1986 |
|
SU1393713A1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИЗМЕНЕНИЙ ТЯГИ ПЛАЗМЕННОГО РАКЕТНОГО ДВИГАТЕЛЯ С ЗАМКНУТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1993 |
|
RU2107186C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ С ПРИВОДОМ ОТ ЛИНЕЙНОГО ЭЛЕКТРИЧЕСКОГО ДВИГАТЕЛЯ | 2016 |
|
RU2630026C1 |
| Двухпакетная индукторная электрическая машина с комбинированным возбуждением (варианты) | 2018 |
|
RU2696273C1 |
| Поляризационный электромеханический преобразователь для электрочасов | 1975 |
|
SU686008A1 |
Изобретение относится к электротехнике и может быть использовано в подьеммых механизмах. Цель состоит в повышении тягового усилия. Устройство содержит цилиндрические катушки с витками, выполненными из ферромагнитного материала с покрытием из Материала с высокой злектро- проводностью, гибкие тяги, соединенные с витками катушек и нажимными плитами. При подаче тОка в катушки их витки приводятся в движение, передавая усилия на тяги и через них на плиты. Повышение тягового усилия и КПД достигается за счет механического увеличения усилий .на тягах по отношению к усилию между витками с одновременным более полным использованием усилий последних. 1 з.п. ф-лы, 1 ил.
Изобретение относится к злектротехни ке, к преобразователям злектричесхой знергии в механическую, и может быть использовано в отраслях промышленности, занятых производством силовых приводов для клапанов подъемных устройств, выключателей, вибраторов и др., пр еимущественно в злектромеханических силовых приводах, в том числе в робототехнике.
(Делыр изобретения является повышение тягового усилия и КПД электромеханического преобразователя.
Для достижения поставленной цели злектромеханический преобразователь снабжен не менее чем двумя гибкими тягами, расположенными между нажимными плитами в одной плоскости и закрепленными на них, 9 катушка расположена между тягами, ее ось совпадает с плоскостью тяг
и перпендикулярна к ним, причем каждый виток катушки жестко соединен с тягой в ее центральной части. При зтом с целью увеличения длины рабочего хода электромехани; ческий преобразователь снабжен дополнительными нджимными плитами и дополнительными катушками, причем дополнительные плиты размещены между основным и и соединены тягами, а дополнительные каТушки размещены между основными и дополнительными нажимными плитами. При зтом повышение тягового усилия в предложенном преобразователе достигается тем, что катушка рйзмещена в центральной части закрепленных на нажимных плитах тяг. Это позволяет соЗДать систему, суммирующую усилие Каждого витка катушки для перемещения нажимных плит.
Предложенный преобразователь, реализуя принцип разложения сил, позволяет получить большее усилие при увеличении длины гибких Тяг и предварительного растяжения этих тяг. Поскольку все витки катушки жестко закреплены на тягах, их усилие суммируется, что порождает большее тяговое усилие, чем создает преобразовательпрототип. КПД предложенного преобразователя выше за счет того, что в. нем катушка, обладая общим суммарным магнитным полем, взаимодействует с каждой гибкой тягой, передавая ей энергию. Это позволяет полнее использовать электрическую энергию источника тока при преобразовании ее в механическую.
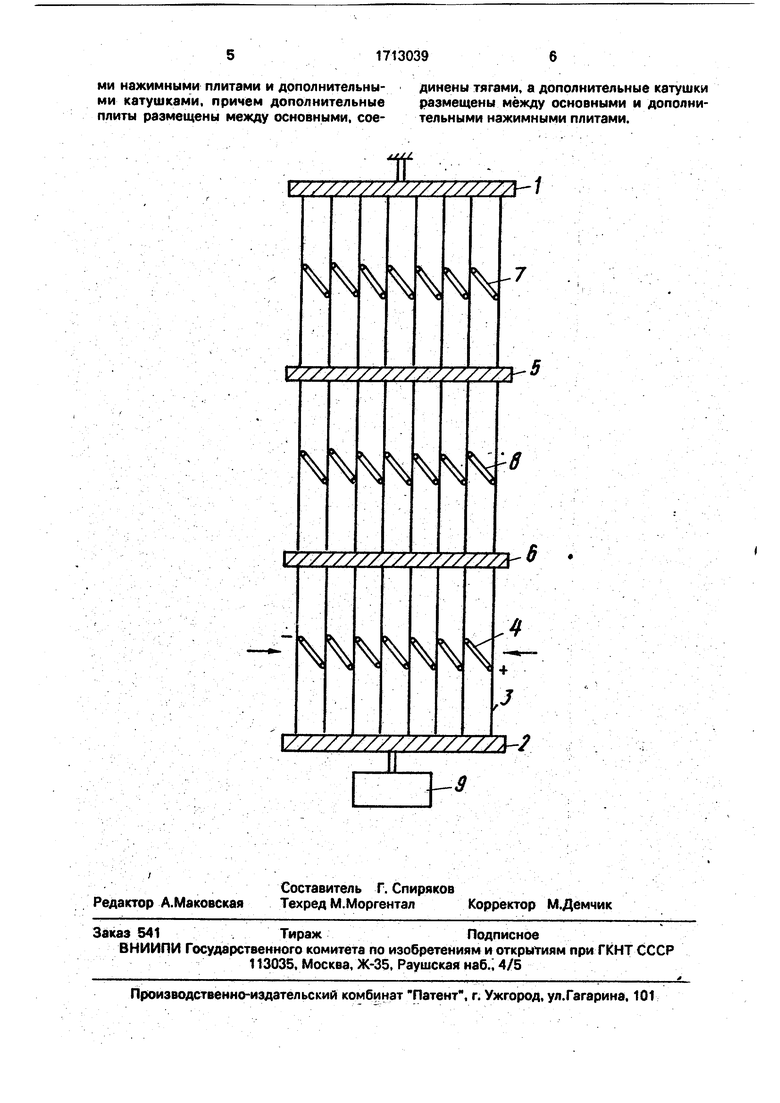
На чертеже изображен электромеханический преобразователь, разрез.
Электромеханический преобразователь (фиг.1) содержит основные нажимные плиты 1,2, причем верхняя нажимная плита 1 закреплена, а нижняя нажимная плита 2 сочленена с рабочим органом (9), например грузом. Нажимные плиты 1, 2 изготовлены из прочного пластика. Возможно изготовление нажимных плит из металла и придание им профилированной формы,Что повышает жесткость конструкции. Основные нажимные плиты 1, 2 снабжена гибкими тягами 3, выполненными, например, из стальных тросиков. В отдельных конструкциях возможно использование гибких тяг, выполненных из металлической ленты, ленты из пластика и др. Гибкие тяги 3 закреплены на нажимных плитах в одной плоскости. Гибкие тяги 3 крепятся в нажимных плитах посредством отверстий (не показаны) и клея. Возможно иное крепление, например посредством болтов, пайки, сварки и др. В центральной части гибких тяг 3 закреплена катушка 4, выполненная из ферромагнитного проводника, покрытого с целью повышения электропроводности слоем металла с хорошей электропроводностью, например медь, серебро, алюминий. С целью повышения надежности катушки ее проводник покрыг слоем изоляции. Поскольку катушка 4 работает в режиме знакопеременных нагрузок, то возможно ее изготовление из нескольких проводников, например свитых в виде ленты, троса. Это увеличивает срок ее работы. Каждый из витков катушки 4 жёстко закреплен на центральной части тяг 3. Крепление возможно путем металлической проволоки, жгута из нитей, в том числе и искусственных, с последующей приклейкой.. Возможен и иной способ крепления: пайка, сварка и др. С целью повышения длины рабочего хода, кроме основных нажимных плит 1, 2 и катушки 4, применены дополнительные на
жимные плиты 5, 6, размещенные между основными и снабженные тягами и дополнительными катушками 7,8. По конструкции они аналогичны основным. В качестве конструктивного решения можно выполнить сквозные отверстия в дополнительных нажимных плитах 5,6, через которые пропустить гибкие тяги 3 и закрепить в них посредством клея или болтов. Катушки 4, 7,
0 8 в зависимости от напряжения источника тока можноподключать последовательно или параллельно. Возможно и смешанное подключение.
Электромеханический преобразова5 тел ь работает следующим образом.
Рабочий орган 9 в виде груза растягивает тяги 3. При этом витки катушек 4, 7, 8 расположены на максимальном расстоянии один от другого. При катушек в
0 цепь источника постоянного или пульсирующего тока возйикает сильное магнитное поле, которое сжимает витки катушек. Но поскольку каждый из витков катушек 4,7, 8 жестко закреплен на тяге 3, то приходит в
5 движение и тяга. При движении тяг 3 в перпендикулярном направлении к осевой линии преобразователя происходит сокращение (лины тяги 3, что приводит к движению вверх основной нажимной плиты
0 2, а также дополнительных Плит 5, 6. Рабочий орган 9 поднимается. При снятии напряжения источника тока с концов катушек 4, 7,8 тяги 3 удлиняются, основные и дополнительные нажимные плиты 2,5, 6 перемещаются вниз, груз 9 опускается. При этом длина рабочего хода преобразователя определяется суммой сокращений длин ячеек, а также величиной тока, проходящего через катушки.
Фармула изобретения
0 КПД,он снабжен не менее чем двумя гибкими тягами, расположенными между нажимными плитами в одно{ плоскости и закрепленными на них, а катушка расположена между тягами, ее ось совпадает с плоскостью тяг и перпендикулярна к ним, причем каждый виток катушки жестко соединен с тягой в ее центральной части.
Jf
В
6
+
J
