Изобретение относится к средствам механизации строительной отрасли, в частности к копровому оборудованию для пробивки скважин в грунтах, и может быть использовано при подготовке оснований и возведении свайных фундаментов с использованием движущегося возвратно-поступательно ударного элемента.
Известен, например, электромагнитный молот прямого действия (патент РФ №2513944 МПК, Е21В 1/22 (2006.01)), содержащий статор с обмоткой возбуждения, ударный элемент, систему обратного хода и кожух. Статор состоит из поперечного стержня, на котором размещена обмотка возбуждения, и двух продольных стержней круглого сечения, на которых размещена якорная обмотка. Ударный элемент состоит из ударной части, двух частей, охватывающих продольные стержни, и соединяющей перемычки. Охватывающие части ударного элемента выполнены с переменным сечением, площадь которого равна отношению расчетной величины магнитного потока на этом участке к расчетному значению магнитной индукции. Главным недостатком известного молота является малое электромагнитное усилие, развиваемое якорными обмотками двух продольных стержней, необходимое для поднятия ударного элемента.
Известен, например, электромагнитный молот для копровой установки сваебоя СП-49ДМ (заявка РФ №2014118812/03 МПК, E02D 7/18 (2006.01)), содержащий электромагнитный молот, построенный на действии соленоида, втягивающий стальной стержень в электромагнитную катушку. Удар стального ударника по наголовнику сваи осуществлен за счет ЭДС, возникающей внутри трубы. Периодичность замены полярности на обмотке трубы молота меняет направление ЭДС, за счет чего меняется направление движения ударника. Электроэнергия осуществляется за счет установки дизельного генератора на трактор Т-170Б на вал отбора мощности, обеспечивающий сваебойную установку СП-49 ДМ автономной электроэнергией. Данный электромагнитный молот имеет достаточно простую конструкцию и схему управления для изменения направления движения ударника, однако его недостатком являются большие пусковые токи, многократно превышающие номинальный, протекающие по обмотке трубы молота в момент ее подключения к источнику как в моменты замены полярности, так и в моменты времени, когда напряжение на катушку подано и стальной стержень начинает в нее втягиваться аналогично пусковым токам обмоток электромагнитных коммутационно-защитных аппаратов, которые приводят к большему расходу электроэнергии и, соответственно, к большим потерям в самой обмотке и снижению КПД.
Известен также электромагнитный молот (патент РФ №2295025 МПК, Е21В 37/00, E02D 7/02 (2006.01)), содержащий цилиндрический корпус-магнитопровод с соосно установленными одноименными электромагнитными катушками прямого и обратного хода, направляющую трубу, ферромагнитные бойки, датчики верхнего и нижнего положений ферромагнитного бойка, систему энергопитания и управления. Электромагнитный молот состоит из "n" элементарных электромагнитных молотов, установленных последовательно друг на друга. Между ферромагнитными бойками элементарных электромагнитных молотов введены немагнитные стальные проставки, каждая длиной, равной величине хода ферромагнитного бойка. Над верхним ферромагнитным бойком и под нижним ферромагнитным бойком образованы герметичные полости. Электромагнитный молот снабжен "n" пригрузочными массами. Одноименные электромагнитные катушки соединены между собой согласно и последовательно и имеют разрезные, полые диски. Каждая одноименная электромагнитная катушка вместе с частью корпуса элементарных электромагнитных молотов выполнена идентичными секциями. Направляющая труба и магнитопроводы выполнены полыми. Направляющая труба электромагнитного молота имеет продольную прорезь, заполненную не токопроводящим материалом.
Поставленная решаемая этим патентом техническая задача - повышение ударов электромагнитных молотов в данном известном изобретении - может быть решена только за счет увеличения числа "n" элементарных электромагнитных молотов, установленных последовательно друг на друга, т.е. за счет увеличения массы всего молота, что приводит, соответственно, к увеличению высоты электромагнитного молота, увеличению числа немагнитных стальных проставок, не участвующих в электромагнитных процессах, и соответственно, снижающих эффективность данного молота. Кроме того, высота подъема ферромагнитного бойка и, соответственно, накопляемая им потенциальная энергия ограничена длиной немагнитной стальной проставки и высотой катушек прямого хода, которые чередуются с катушками обратного хода. Т.е. увеличение высоты подъема потребует увеличения высоты катушек прямого и обратного хода и длины немагнитных стальных проставок, и эффективность молота при этом будет снижаться.
При движении бойка вверх воздух в герметичной полости, расположенной над ним и соединенной с дополнительной камерой, будет сжиматься, а затем, при движении бойка вниз, способствовать этому движению. А, как известно, процесс сжатия воздуха и последующего его расширения с целью совершения какой-либо работы связан с возникающими и неизбежными тепловыми потерями, что приводит, во-первых, к снижению КПД молота, нагреву воздуха в герметичных полостях - сверху и снизу бойка и, соответственно, образованных этими полостями элементов, во-вторых, к необходимости установки охлаждающих радиаторов.
Известен также электромагнитный молот, принятый за прототип (патент RU №1584480, МПК Е21С 3/16). Этот электромагнитный молот имеет привод от линейного электродвигателя, содержит четыре одинаковые по размерам электромагнитные катушки (ЭМК) (1-4) цилиндрического вертикального статора, заключенные в отдельные его кольцевые ферромагнитные корпуса (5-8) с ферромагнитными полюсами (9), (10) и диамагнитными фланцами (11-16), входящие во вторичный элемент линейного электродвигателя. При этом ЭМК (1-4) и полюса центрируются диамагнитной направляющей (17), внутри которой перемещается стержневой боек (18), входящий в его первичный элемент, ударяя по наголовнику (19) и рабочему инструменту (20). Каждая ЭМК (1-4) подключена к своему блоку (21-24) питания. В промежутке между наголовником (19) и нижней ЭМК расположены датчики (41-43) положения, подключенные к блоку согласования (БС) (управления) (44). Датчики (41-43) выдают сигналы о местонахождении бойка (18), а БС (управления) (44) формирует на основе этой информации сигналы на управление блоков (21-24) питания. Выполнен БС (44) на логических элементах и содержит элементы ИЛИ - НЕ (45, 46), одновибраторы (49, 50) с потенциометрами (51, 52), элемент (53) задержки импульса от датчика (42), элементы И (54, 55), (RS)-триггеры (56, 57) и кнопки (47) и (48) с фиксацией соответственно Пуск и Стоп. Включение ЭМК (1-4) для перемещения бойка (18) происходит с первой ЭМК (1) на третью или со второй ЭМК (2) на четвертую в момент, когда верхний торец бойка (18) не дошел до места разделения второй и третьей или третьей и четвертой ЭМК.
Принцип работы молота с таким линейным электродвигателем заключается в последовательной попеременной подачи напряжения блоками питания (21-24) в электромагнитные катушки (ЭМК) (1-4), последние создают при этом электромагнитную силу, за счет чего осуществляется подъем бойка (18). Причем по мере движения бойка вверх питание с нижних катушек (1), (2) и (3) блоками питания по соответствующим сигналам схемы управления по соответствующим сигналам датчиков (41-43) последовательно снимается.
Когда боек достигает высоты h≈2⋅Lк+3/4⋅Lк, где Lк - высота катушки, катушка (4) обесточивается. Боек, совершив свободный выбег за счет сил инерции, останавливается на высоте h≈3⋅Lк, а затем под действием силы тяжести падает вниз. Причем на расстоянии 3/4Lк до удара для увеличения силы удара схема управления подает соответствующий сигнал управления блоку питания (21) на подачу тока в катушку (1). Т.о., боек движется вниз под действием силы тяжести и под действием электромагнитной силы катушки (1).
Недостатки данного известного электромагнитного молота: несколько (три) датчиков положения бойка, достаточно сложная система управления электропитанием катушек (1-4), которая должна работать очень точно в зависимости от положения бойка и взаимосогласованно, множество тиристорных преобразователей (четыре) - все это приводит к усложнению и удорожанию установки.
Кроме того, тиристорные преобразователи (управляемые выпрямители), как известно, характеризуются большой величиной пульсаций напряжения и тока, которые возрастают с увеличением угла регулирования "α" тиристоров как цепи нагрузки, так и в питающей сети, что, соответственно, приводит к росту тепловых потерь (дополнительные потери активной мощности) в обмотках электромагнитных катушек от высших гармоник тока и в обмотках необходимого питающего трансформатора или генератора. Коэффициент мощности cosϕ таких выпрямителей зависит от угла "α" примерно в соотношении cosϕ≈cosα, (cosϕ=cos(α+γ/2), где γ - угол коммутации). Т.е. увеличение угла управления ведет к увеличению потребления реактивной мощности и снижению коэффициента мощности выпрямителя.
Диамагнитная направляющая, внутри которой перемещается взаимодействующая с ней посредством трения подвижная часть данного ЛЭД, в процессе работы электромагнитного молота нагревается, что приводит к дополнительным потерям мощности.
Техническая задача, на решение которой направлено заявляемое изобретение, состоит в устранении указанных недостатков, а именно: упрощение, в т.ч. и схемы управления установки, снижение числа ее элементов, таких как датчики положения бойка, ее удешевление, повышение энергетических показателей (КПД, cosϕ) электромагнитного молота.
Поставленная задача достигается тем, что в известном электромагнитном молоте с приводом от линейного электрического двигателя, содержащем кольцевые электромагнитные катушки цилиндрического вертикального статора, заключенные в отдельные кольцевые ферромагнитные корпуса, электрически сообщающиеся с источником питания, которые входят во вторичный элемент линейного электродвигателя; размещенный внутри вторичного элемента подвижный боек в виде стержня, входящий в первичный элемент линейного электродвигателя, нижняя часть которого установлена с возможностью взаимодействия с наголовником рабочего инструмента; датчик положения подвижного бойка; блок управления; кнопки управления, в отличие от него заявляемый электромагнитный молот дополнительно содержит магнитопровод статора, который размещен в защитном кожухе, также являющийся частью упомянутого вторичного элемента линейного электродвигателя. Также содержит лазерную линейку в качестве датчика положения подвижного бойка, закрепленную в верхней части защитного кожуха, блок питания постоянным током, двухзвенный преобразователь частоты переменного тока. При этом магнитопровод статора содержит в качестве кольцевых корпусов отдельные полые ферромагнитные шайбы с витками их обмотки возбуждения данных кольцевых соосных электромагнитных катушек, катушки которых наложены на каркасы и размещены в полости каждой из данных ферромагнитных шайб магнитопровода с образованием монтажных модулей, из которых собран статор линейного электродвигателя. Причем данный цилиндрический вертикальный статор выполнен из нескольких монтажных модулей, набранных из таких катушек многофазной цепи и соединенных между собой гибкой связью. Длина самого статора и соответственно количество шайб его магнитопровода определены числом катушек и, соответственно, числом данных шайб на полюс его обмотки возбуждения. Число модулей статора кратно общему количеству фаз его обмотки возбуждения. При последовательном сопряжении по вертикали статора одного модуля с другим катушки соответствующих фаз уложены с поочередной сменой местоположения отдельных фаз таким образом, что при подключении фазных вводов данной обмотки возбуждения магнитопровода к трехфазному переменному току на статоре образуется бегущее вдоль магнитопровода статора электромагнитное поле. А при подключении фазных вводов витков данной обмотки возбуждения магнитопровода, которые расположены в его верхней части, к постоянному току создается неподвижное в пространстве электромагнитное поле, удерживающее подвижный боек в верхней части защитного кожуха. При этом необходимый воздушный зазор между магнитопроводом статора и подвижным бойком образован посредством подшипника качения, установленного в каждой торцовой крышке защитного кожуха, а сам боек, являющийся первичным элементом линейного электродвигателя, выполнен с токопроводящим покрытием из немагнитного материала. Первый выход блока управления, на который подано стандартное трехфазное напряжение сети переменного тока 380 В и который выполнен с цифровым управлением, соединен со входом двухзвенного преобразователя частоты, на который также подано стандартное трехфазное напряжение сети переменного тока 380 В. Второй выход блока управления соединен со входом блока питания постоянным током, который по его первому выходу соединен с фазными вводами обмотки возбуждения магнитопровода, расположенной витками в его верхней части. Вторым выходом блок питания постоянным током соединен со входом лазерной линейки, выход которой соединен со входом блока управления. Выход двухзвенного преобразователя частоты соединен с фазными вводами обмотки возбуждения магнитопровода. Кнопки управления установлены на панели управления, электрически связанной с блоком управления, выполнение которого также возможно и при наличии дистанционного пульта управления, связанного с блоком управления по радиоканалу. Причем защитный кожух установлен на опорной стреле с возможностью перемещения по ее направляющим в вертикальном направлении посредством лебедки.
Число катушек и, соответственно, число шайб на полюс его обмотки возбуждения в частном случае установлено равным 1, а количество шайб магнитопровода статора принято равным 120. Число модулей магнитопровода статора, кратное общему количеству фаз его обмотки возбуждения, в этом частном случае равно 40 на фазу.
В предложенном электромагнитном молоте с приводом от цилиндрического линейного электродвигателя содержится всего один типовой двухзвенный частотный преобразователь на обычных типовых IGBT транзисторах и один датчик положения стержня (бойка), выполненный в виде лазерной линейки. Именно за счет этих двух элементов достигается большая, по сравнению с прототипом, простота в изготовлении, надежность, высокие энергетические показатели (КПД, cosϕ). Здесь также не требуется наличие нескольких (4-х) источников питания.
Более высокий КПД обусловлен: отсутствием трения стержня о традиционную диамагнитную составляющую ввиду отсутствия таковой, а суммарные потери в верхнем и нижнем подшипниках скольжения имеют существенно меньшую величину; практическим отсутствием высших гармоник, генерируемых частотным преобразователем, в питающей сети и их отсутствием в обмотке возбуждения, а также отсутствием пусковых токов в последних. Он имеет достаточно простую предложенную систему управления, а значит и более дешевую, вследствие того, что нет необходимости подавать ток в "n"-е число обмоток возбуждения соответствующим "n"-м числом силовых ключей, в зависимости от положения стержня (бойка), определяемого "n"-м числом датчиков.
Кроме того, ввиду отсутствия диамагнитной направляющей, здесь не требуется повышенная точность изготовления деталей, следовательно, обеспечивается большая нечувствительность к изменению их температуры и, соответственно, большая надежность и меньшая стоимость заявляемого молота в целом.
В заявляемом изобретении по сравнению с прототипом поэтому достигается достаточно существенное упрощение конструкции и схемы управления, обеспечиваемое за счет применения заявленных связей элементов: обмоток, соединенных между собой гибкой связью соответствующим образом, одного преобразователя частоты двухзвенного типа на IGBT транзисторах и одной лазерной линейки.
Преобразователь частоты двухзвенного типа на IGBT транзисторах, как известно, имеет высокий коэффициент мощности (cosϕ≈0.99), практически не зависящий от частоты выходного напряжения, т.е. им практически не генерируются высшие гармоники в питающую сеть. Регулирование выходного напряжения такого инвертора достигается изменением площади импульса полуволны методом широтно-импульсной модуляции (ШИМ), т.е. регулированием длительности (ширины) импульса полуволны. Выходное напряжение инвертора при этом является практически синусоидальным.
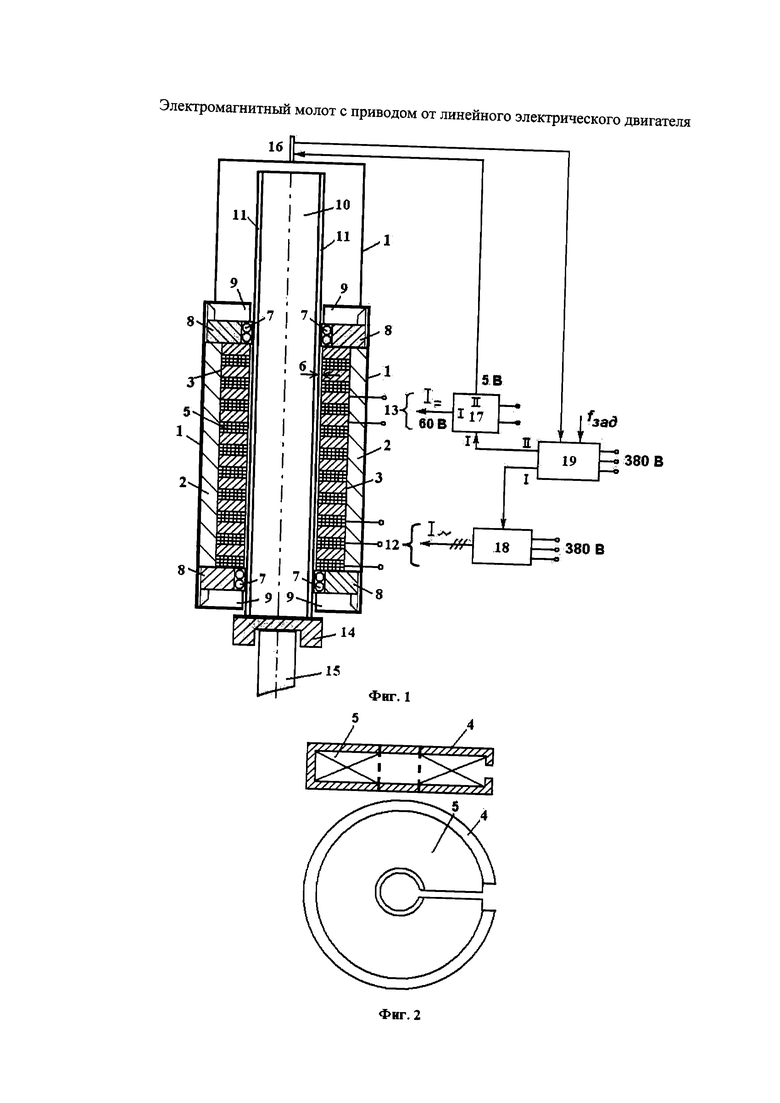
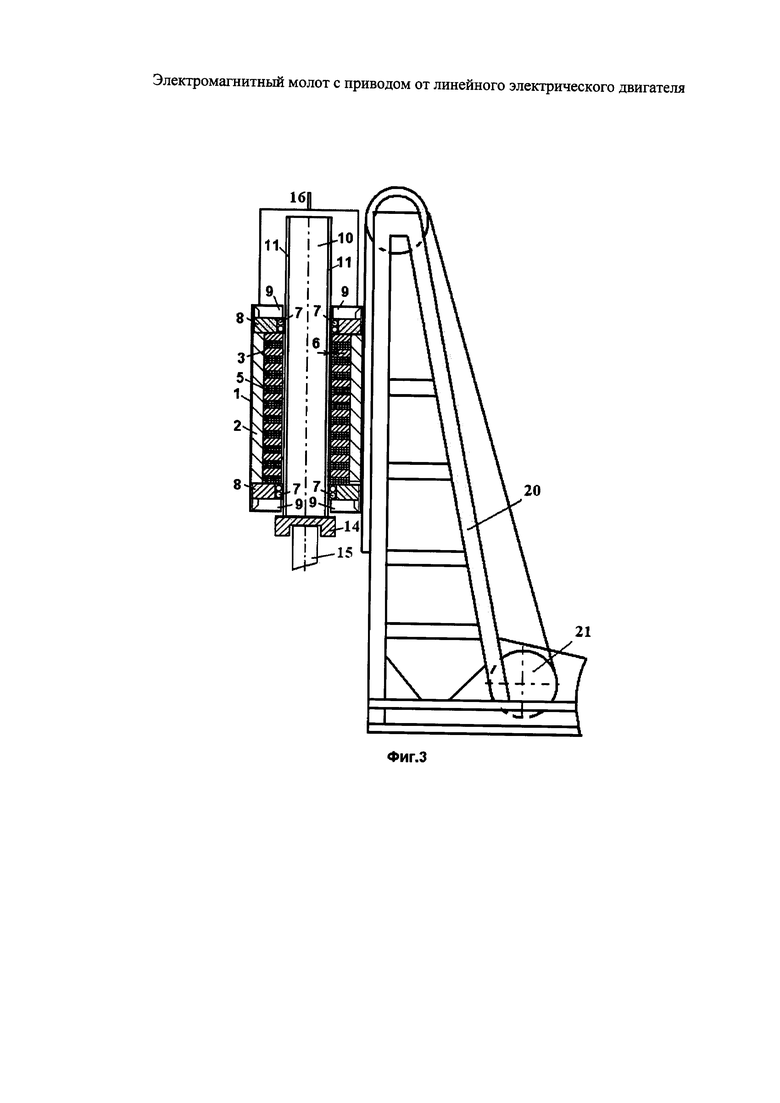
Заявляемое изобретение иллюстрируется: фиг. 1 - электромагнитный молот с приводом от линейного электрического двигателя - вид сбоку; фиг. 2 - ферромагнитная шайба; фиг. 3 - расположение сваезабивного молота на опорной стреле.
Заявляемый электромагнитный молот с приводом от линейного электрического двигателя (ЛЭД) описан на примере сваезабивного молота (фиг. 1), содержит расположенную в защитном кожухе (1) неподвижную часть - цилиндрический вертикальный индуктор (статор) (2), как его вторичный элемент с магнитопроводом индуктора (3), содержащем отдельные полые ферромагнитные шайбы (4) (фиг. 2) с витками их обмотки возбуждения (5). Причем кольцевые катушки данной обмотки возбуждения (5) наложены на каркасы (не показано) и размещены в полости каждой из ферромагнитных шайб магнитопровода, которые образуют в сборе монтажные модули (не показаны), из которых собран индуктор двигателя. Необходимый воздушный зазор (6) относительно магнитопровода индуктора как вторичного элемента поддерживается с помощью подшипника качения (7), запрессованного в торцевую крышку (8) кожуха. Конструкция зафиксирована защитными кольцами (9). Ударная часть молота - первичный элемент цилиндрического линейного электродвигателя (боек), выполнен в виде стержня (10) с токопроводящим покрытием (11) из немагнитного материала (алюминия или меди).
Т.о., цилиндрический индуктор (2) выполнен из нескольких монтажных модулей, числом 40 на фазу, набранных из катушек фаз многофазной (трехфазной) цепи и соединенных между собой гибкой связью (не показано). Длина данного цилиндрического вертикального индуктора (статора), не превышающая 6 м, и соответственно количество шайб (4) его магнитопровода (3), которое выполнено числом 120, определены числом катушек обмотки возбуждения и соответственно числом данных шайб на полюс равным 1. Причем число модулей данного цилиндрического индуктора, равное 40 на фазу, кратно общему количеству всех фаз его обмотки возбуждения, а при последовательном сопряжении по вертикали индуктора (статора) одного модуля с другим катушки соответствующих фаз уложены с поочередной сменой местоположения отдельных фаз таким образом, что при выполненном подключении фазных вводов (12) данной обмотки возбуждения магнитопровода к трехфазному переменному току на индукторе (статоре) образуется бегущее вдоль магнитопровода (статора) индуктора (3) электромагнитное поле, а при выполненном подключении фазных вводов (13) витков данной обмотки возбуждения магнитопровода к постоянному току создается неподвижное в пространстве электромагнитное поле, удерживающее первичный элемент цилиндрического линейного электродвигателя (боек) (10) в заданном фиксированном положении. Причем эти витки обмотки возбуждения расположены в верхней части магнитопровода (3). Также заявляемое изобретение содержит наголовник (14), рабочий инструмент (свая) (15), лазерную линейку (16), выполненную по типу Leica Disto D510 и закрепленную в верхней части защитного кожуха (1), блок питания постоянным током (17), на который подано питание постоянного тока от его источника (не показан), двухзвенный преобразователь частоты переменного тока (18), блок управления (19) с цифровым управлением.
При этом первый выход блока управления (19), подающий управляющий сигнал на перемещение бойка (10), соединен с входом двухзвенного преобразователя частоты переменного тока (18), на который подано стандартное трехфазное напряжение сети переменного тока 380 В. Второй выход II блока управления (19), подающий управляющий сигнал для фиксации бойка (10) в верхнем положении, соединен с входом блока питания постоянным током (17), который осуществляет по его выходу I подачу постоянного тока в обмотку возбуждения (5), имеющую соответствующие фазные вводы (13) обмотки возбуждения (5). По второму выходу II блока питания постоянным током (17) осуществляется питание лазерной линейки (16). Положение бойка (10) непрерывно отслеживается блоком управления (19) с помощью импульса на него от лазерной линейки (16). Выбор частоты и амплитуды удара бойка производится с помощью кнопок панели управления (не показано) (fзад), электрически связанной с блоком управления (19), или с помощью дистанционного пульта управления (не показано), связанного с блоком управления (19) по радиоканалу.
Защитный кожух (1) ЦЛЭД (Фиг. 3) установлен на опорной стреле (20) и может перемещаться по ее направляющим (не показано) в вертикальном направлении с помощью тросовой лебедки (21).
Электромагнитный молот с приводом от линейного электрического двигателя используют следующим образом. Устанавливают в заданной позиции стрелу (20), статор (2), а также наголовник (14) и рабочий инструмент (свая) (15). Выбрав требуемый режим работы, с помощью кнопок панели управления (не показано) или дистанционного пульта управления (не показано) блоком управления (19) по его выходу I подают соответствующий управляющий сигнал в преобразователь частоты двухзвенного типа (18) на перемещение стержня (10).
Схема управления (не показана) (драйвер) двухзвенного преобразователя частоты (18) подает соответствующие сигналы управления на управляющие электроды (затворы) силовых ключей (не показаны) этого преобразователя, а именно IGBT транзисторы. Последние открываются в последовательности, заданной схемой управления, за счет чего обеспечивается подача с него по его выходам подведенного к нему переменного тока, при регулировании в нем частоты и напряжения, в обмотки возбуждения (5) индуктора (2) (статора) линейного электродвигателя по подводящим к ним медным кабелям (не показаны). Обмотки возбуждения линейного электродвигателя, образующие его вторичный элемент и соединенные между собой по заданной схеме (не показано), возбуждают бегущее вдоль магнитопровода (3) электромагнитное поле. В результате взаимодействия образующегося этого первичного поля и индуктируемых токов в токопроводящем покрытии (11) стержня (10), как первичного элемента, возникает тяговое усилие, благодаря которому данный первичный элемент (10) прямолинейно перемещается.
Причем для подъема ударной части молота - стержня (10) двухзвенный преобразователь частоты (18) формирует такую последовательность импульсов тока в обмотки возбуждения (5) магнитопровода индуктора (3), что ими образуется, благодаря данной электрической схеме, бегущее вверх электромагнитное поле. При подходе ударной части молота - стержня (10) к крайнему верхнему положению блок управления (19), по соответствующему сигналу лазерной линейки (16), по его выводу I прекращает подачу управляющих сигналов в двухзвенный преобразователь частоты (18) на перемещение стержня (10) вверх, и подает по нему управляющие сигналы на перемещение стержня (10) вниз. При этом направление создаваемого обмотками возбуждения (5) электромагнитного поля меняется на противоположное, вследствие этого изменяется направление индуктируемых токов в токопроводящем покрытии (11) первичного элемента и самого электромагнитного тягового усилия. Стержень (10) под действием собственной силы тяжести и этого тягового усилия устремляется вниз. По мере заглубления сваи (15) статор двигателя (2) перемещается вниз с помощью лебедки (21).
Предложенный электромагнитный молот по сравнению с прототипом является более дешевым, простым в изготовлении, не требует повышенной точности изготовления применяемых деталей, нечувствителен к изменению температуры, имеет более простую схему управления, т.к. содержит один типовой двухзвенный частотный преобразователь, один датчик положения стержня (бойка), выполненный в виде лазерной линейки. Более высокий КПД обусловлен: отсутствием трения стержня о традиционную диамагнитную его направляющую ввиду отсутствия таковой, а суммарные потери в верхнем и нижнем подшипниках качения имеют существенно меньшую величину. Заявляемый электромагнитный молот характеризуется практическим отсутствием высших гармоник, генерируемых частотным преобразователем, в питающей сети и их отсутствием в обмотках возбуждения, а также отсутствием пусковых токов в последних. Следовательно, нет тепловых потерь от этих высших гармоник и пусковых токов. Он имеет достаточно простую систему управления, а значит и более дешевую, вследствие того, что нет необходимости подавать ток в "n"-е число обмоток возбуждения соответствующим "n"-му числу силовых ключей в зависимости от положения стержня (бойка), определяемого "n"-м числом датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИФТ С ЭЛЕКТРОПРИВОДОМ ПОДЪЕМА ЭЛЕКТРИЧЕСКИМ ЛИНЕЙНЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2630011C2 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| УДАРНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ КОМБИНИРОВАННОГО ТИПА | 2013 |
|
RU2538094C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МАШИН УДАРНОГО ДЕЙСТВИЯ | 2011 |
|
RU2454777C1 |
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 1994 |
|
RU2091971C1 |
| ЭЛЕКТРОМОЛОТ | 2008 |
|
RU2383684C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ УДАРНОГО ДЕЙСТВИЯ | 2013 |
|
RU2531701C1 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 2004 |
|
RU2295025C2 |
| ЭЛЕКТРОМОЛОТ | 2008 |
|
RU2379422C1 |
| Импульсный источник сейсмических сигналов | 1990 |
|
SU1778729A1 |
Изобретение относится к средствам механизации строительной отрасли, а также может быть использовано при изготовлении оснований и возведении свайных фундаментов. Устройство содержит магнитопровод (3) статора (2) в защитном кожухе (1) - вторичный элемент линейного электродвигателя с подвижным внутри ударным бойком (10) в виде стержня - его первичный элемент; датчик положения бойка в виде лазерной линейки (16). Магнитопровод содержит полые ферромагнитные шайбы (4) с витками катушки возбуждения (5) фаз многофазной цепи, образующие в сборе монтажные модули магнитопровода, катушки (5) которых уложены с чередующейся сменой местоположения фаз; обмотки катушки (5) питаются от источника переменного тока через преобразователь (18); боек (10) покрыт немагнитным материалом. В работе взаимосвязь подвижного бойка со встроенным блоком управления (19) осуществлена посредством преобразователя (18), регулирующего по его сигналу частоту и напряжение обмоток (5) на перемещение бойка (10) и прекращающего подачу управляющих сигналов по сигналу блока (19) от импульса лазерной линейки (16) на остановку бойка в верхнем положении. Обеспечивается упрощение, повышение энергетических показателей. 3 з.п. ф-лы, 3 ил.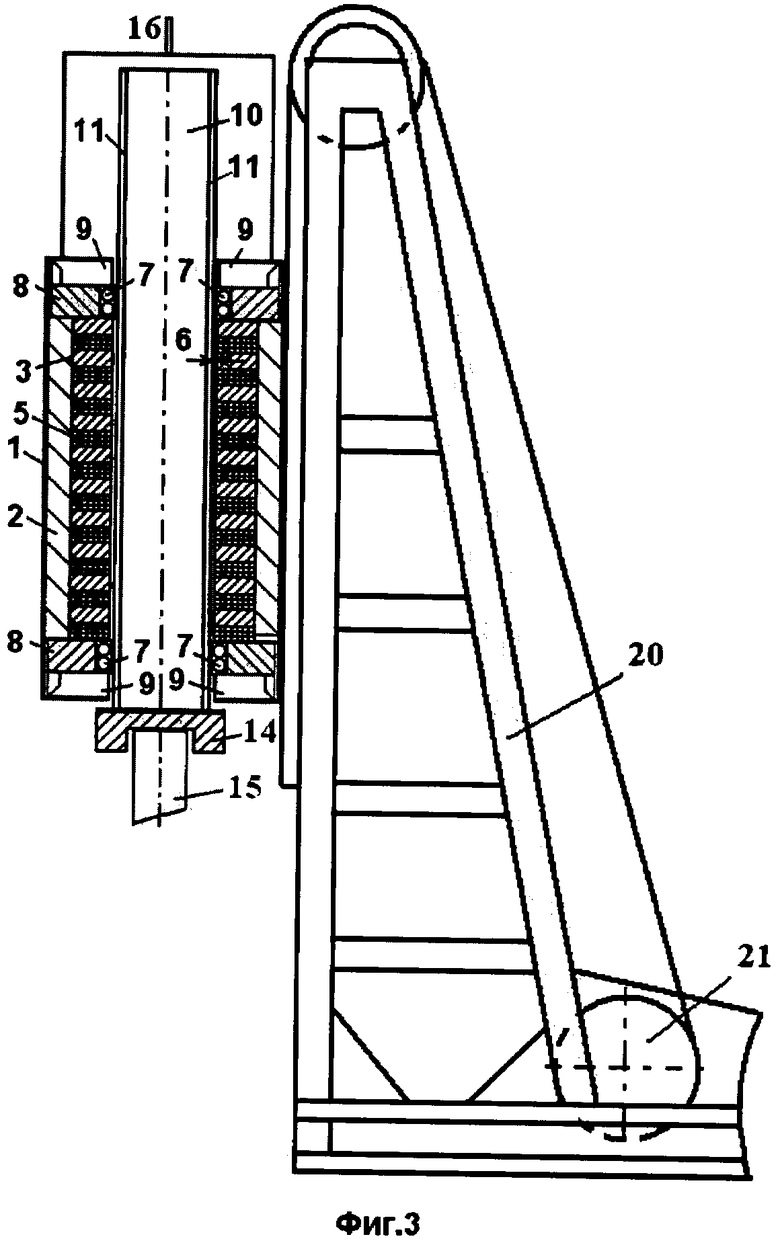
Электромагнитный молот с приводом от линейного электрического двигателя, содержащий кольцевые электромагнитные катушки цилиндрического вертикального статора, заключенные в отдельные кольцевые ферромагнитные корпуса, электрически сообщающиеся с источником питания, которые входят во вторичный элемент линейного электродвигателя; размещенный внутри вторичного элемента подвижный боек в виде стержня, входящий в первичный элемент линейного электродвигателя, нижняя часть которого установлена с возможностью взаимодействия с наголовником рабочего инструмента; датчик положения подвижного бойка; блок управления; кнопки управления, отличающийся тем, что он дополнительно содержит магнитопровод статора, который размещен в защитном кожухе, также являющийся частью упомянутого вторичного элемента линейного электродвигателя; лазерную линейку в качестве датчика положения подвижного бойка, закрепленную в верхней части защитного кожуха; блок питания постоянным током; двухзвенный преобразователь частоты переменного тока; при этом магнитопровод статора содержит в качестве кольцевых корпусов отдельные полые ферромагнитные шайбы с витками их обмотки возбуждения данных кольцевых соосных электромагнитных катушек, катушки которых наложены на каркасы и размещены в полости каждой из данных ферромагнитных шайб магнитопровода с образованием монтажных модулей, из которых собран статор линейного электродвигателя; причем данный цилиндрический вертикальный статор выполнен из нескольких монтажных модулей, набранных из таких катушек многофазной цепи и соединенных между собой гибкой связью, длина самого статора и соответственно количество шайб его магнитопровода определены числом катушек и соответственно числом данных шайб на полюс его обмотки возбуждения, число модулей статора кратно общему количеству фаз его обмотки возбуждения, а при последовательном сопряжении по вертикали статора одного модуля с другим катушки соответствующих фаз уложены с поочередной сменой местоположения отдельных фаз таким образом, что при подключении фазных вводов данной обмотки возбуждения магнитопровода к трехфазному переменному току на статоре образуется бегущее вдоль магнитопровода статора электромагнитное поле, а при подключении фазных вводов витков обмотки возбуждения магнитопровода, которые расположены в его верхней части, к постоянному току создается неподвижное в пространстве электромагнитное поле, удерживающее подвижный боек в верхней части защитного кожуха; при этом необходимый воздушный зазор между магнитопроводом статора и подвижным бойком образован посредством подшипника качения, установленного в каждой торцовой крышке защитного кожуха, а сам боек, являющийся первичным элементом линейного электродвигателя, выполнен с токопроводящим покрытием из немагнитного материала; первый выход блока управления, на который подано стандартное трехфазное напряжение сети переменного тока 380 В и который выполнен с цифровым управлением, соединен с входом двухзвенного преобразователя частоты, на который также подано стандартное трехфазное напряжение сети переменного тока 380 В, второй выход блока управления соединен с входом блока питания постоянным током, который по его первому выходу соединен с фазными вводами обмотки возбуждения магнитопровода, расположенной витками в его верхней части, вторым выходом блок питания постоянным током соединен с входом лазерной линейки, выход которой соединен с входом блока управления, а выход двухзвенного преобразователя частоты соединен с фазными вводами обмотки возбуждения магнитопровода; кнопки управления установлены на панели управления, электрически связанной с блоком управления, выполнение которого также возможно и при наличии дистанционного пульта управления, связанного с блоком управления по радиоканалу; причем защитный кожух установлен на опорной стреле с возможностью перемещения по ее направляющим в вертикальном направлении посредством лебедки.
2. Электромагнитный молот по п. 1, отличающийся тем, что число катушек и соответственно число шайб на полюс его обмотки возбуждения установлено равным 1.
3. Электромагнитный молот по пп. 1, 2, отличающийся тем, что количество шайб магнитопровода статора принято равным 120.
4. Электромагнитный молот по п. 1, отличающийся тем, что число модулей магнитопровода статора, кратное общему количеству фаз его обмотки возбуждения, составляет 40 на фазу.
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| Способ управления многобойковым электромагнитным молотом и устройство для его осуществления | 1984 |
|
SU1247476A1 |
| Система регулирования электромагнитного молота | 1986 |
|
SU1388556A2 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 2004 |
|
RU2295025C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

