Изобретение относится к системам автоматического управления и измерительной техники и может быть использовано для измерения или контроля положения путем преобразования перемещения объекта в частоту (период) следования импульсов, параметры которых (длительность и амплитуда) остаются неизменными.
Известен автогенераторный Датчик пе-, ремещения, состоящий из усилителя на транзисторе, двух корректирующих конденсаторов, разделительного и контурного конденсаторов, трансформатора с подвижным металлическим экраном, Т-образной НС-цепи.
К недостаткам этого датчика следует отнести то, что о перемещениях судят только по наличию или отсутствию переменного напряжения на выходе что ограничивает
точность измерения при расширении диапазона перемещений.
Известен также двтогенераторный датчик перемещения, состоящий из усилителя на транзисторе, двух корректирующих конденсаторов, разделительного и контурного конденсаторов, трансформатора с подвижным металлическим экраном,-Т-образной RC-цепи, регулируемого источника напряжения, первого и второго ключевых элементов, двух детекторов сигналов разных полярностей,
К недостаткам этого датчик а следует отнести сложность схемы повышения помехоустойчивости, что снижает его надежность в работе.
Известен также бесконтактный двухпозиционный датчик положения, состоящий из дифференциального трансформатора .с
разомкнутым магнитопроводом, фазочувствительного выпрямителя, усилителя, подвижного сердечника, стабилитрона, тиристора,транзистора, нагрузки.
К недостаткам этого датчика следует отнести контроль двух позиций, что ограничивает возможность использования и снижает точность измерения датчика в многопозиционных перемещениях.
Наиболее близким к предлагаемому является измеритель положения, содержащий источник опорного напряжения, первый, второй, третий и четвертый диоды, первый, второй и третий пороговые элементы, первый и второй транзисторы, первый, второй, третий и четвертый резисторы,,причем первый и второй входа измерителя соединены соответственно с первым выходом источника опорного напряжения и катодом первого диода, вторым выходом источника опорного напряжения и катодом второго диода, третий вход измерителя соединен с входом первого порогового элемента и коллектором первого транзистора, база которого соединена с общей шиной, а эмиттер - с ймиттером второго транзистора, база которого соединена с выходом первого порогового элемента и первыми выводами первого и второго резисторов, второй вывод первого резистора соединен с анодом первого диода и первым выводом третьего резистора, второй вывод которого соединен с входом третьего порогового элемента и катодом третьего диода, анод которого связан с коллектором второго транзистора и анодом четвертого диода, катод которого соединен с входом третьего порогового, элемента и первым выводом четвертого резистора, второй вывод которого соединен с анодом второго диода и вторым выводом второго резистора, а выход1 1 второго и третьего пороговых элементов являются соответственно первым и вторым выходами измерителя.
К недостаткам этого устройства следует отнести ограниченную точность измерения при расширении диапазона перемещений (всего два положения фиксируются устройством) и низкую помехоустойчивость при передаче по длинным линиям связи.
Цель изобретения - повышение помехоустойчивости и точности измерителя положения путем преобразования действующего значения переменного напряжения, снимаемого с вторичной обмотки трансформатора с подвижным стержнем, в частоту (период) следования импульсов и заполнения последних периодическим сигналом, превышающим на несколько порядков (более двух) частоту следования информационного импульсного сигнала.
Тем самым информационные импульсы получают дополнительный признак, отличающий их от возможных подобных импульсных помех, возникающих в линии связи. Это увег
5 личивает помехоустойчивость информационных импульсов. Перемещение подвижного стержня преобразуется в длительность паузы (периода) между импульсами. Это позволяет обеспечить высокую
0 точность измерения в широком диапазоне перемещения.
Поставленная цель достигается тем, что в известный измеритель положения, содержащий источник опорного напряжения, два
15 транзистора разного типа проводимости, датчик положения и четыре резистора, при этом одни выводы первого и второго, третьего и четвертого резисторов соединены между собой, а также общую шину, дополнительно введены, первый трансформатор с двумя обмотками, конденсатор, пятый резистор, генератор сигналов, а датчик положения выполнен в виде трансформатора с подвижным стержнем и двумя обмотками,
5 одни выводы которых соединены с общей шиной, другие выводы подключены соответственно к выходу генератора сигналов и к одному выводу второй обмотки первого трансформатора, другой вывод которой соединен с Общей щиной, другой вывод второго резистора соединен с другим выводом третьего резистора и через первую обмотку первого трансформатора подключен к базе транзистора обратной проводимости, кол5. лектор которого подключен к базе транзистора прямой проводимости, а эмиттер - соединен с другим выводом четвертого резистора и через конденсатор - с точкой соединения первого и второго резисторов и с
0 эмиттером транзистора прямой проводимости, коллектор которого соединён с выходной шиной и через пятый резистор - с общей шиной, подключенной к соедине ным между собой выводам третьего и четвертого резисторов, к другому выходу генератора сигналов и другому выходу источника опорного напряжения, один выход которого соединен с другим выводом первого резистора.
0 Предлагаемый измеритель положения позволяет путем введения новых элементов и дополнительных связей организовать выработку информационных сигналов в виде импульсов постоянной амплитуды и длительности, для повышения помехоустойчивости которых при передаче по длинным (до 1 км) линиям связи заполнять их периодическими сигналами более высокой частоты, чем частота следования импульсов. Для повь1шения точности измерения при расширеНИИ диапазона перемещений используется атчик положения в виде трансформатора с одвижным стержнем. Перемещение стерня преобразуется в период (паузу) следования информационных импульсов.
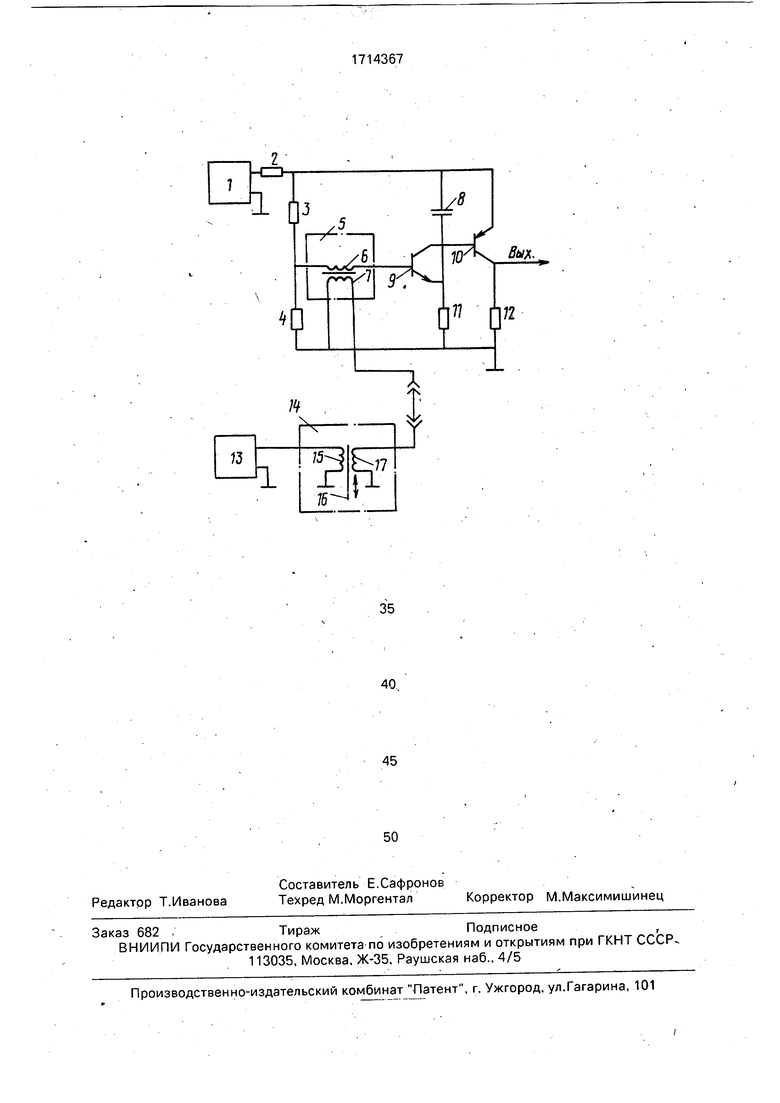
На чертеже представлена схема измерителя положения (в дальнейшем измериель).
Устройство содержит источник опорного напряжения 1, первый 2, второй 3, третий , четвертый 11 и пятый 12 резисторы, первый трансформатор 5 с первой 6 и второй 7 обмотками, конденсатор 8, первый 9 и второй 10 транзисторы, генератор сигналов 13, второй трансформатор 14 с третьей 15 и етвертой 17 обмотками и подвижным стернем 16. Вторые вывода источника опорно-го напряжения 1, резисторов 4, 11, 12, генератора сигналов 13, обмоток 15, 17, первый вывод обмотки 7 соединены о общей шиной. Первый вывод источника опорного напряжения 1 соединен с первым выводом резистора 2, второй вывод которого соединен с первым выводом резистора 3, первой обкладкой конденсатора 8 и эмиттером транзистора 10. Второй вывод резистора 3 соединен с первым выводом обмотки 6, первым выводом резистора 4. Второй вывод обмотки 6 соединен с базой транзистора 9, коллектор которого соединен с базой транзистора 10,коллектор последнего соединен с первым выводом резистора 12 и является выходом (Вых.) измерителя. Вторая обкладка конденсатора 8 соединена с эмиттером транзистора 9 и первым выводом резистора 11. Второй вывод обмотки 7 соединен с первым выводом обмотки 17. Первый вывод генератора сигналов 13 соединен с первым выводом обмотки 15.
Измеритель работает следующим образом.
Источник опорного напряжения (ИОН) 1 подает стабильное .постоянное напряжение питания на схему измерителя и задает величину амплитуды информационных импульсов, снимаемых с выхода Вых измерителя. В исходном состоянии конденсатор 8 разряжен. В момент подачи напряжения питания от ИОН 1 начинается заряд конденсатора 8 по цепи: первый вывод (положительный уровень напряжения) ИОН 1 - Ri-C-R - общая шина. Напряжение на резисторе RA изменяется по экспоненциальному закону и равно
I IIR2 -Ь R3- /4и Гиионр П - е/Н ,
где UHOH - напряжение на выходе ИОН 1;
73. - постоянная времени заряда конденсатора 8.
Приняты допущения:
-внутреннеесопротивление ИОН 1 равно нулю;
- обратные тока транзисторов 9 и 10 равны нулю (работа в нормальных условиях).
Величину резистора 11-выбираются из условия
R4 (R2 + Кз).
Если выбирать величины резисторов 2, 3, 4 из условия Ri« (Ra + Rs), то отношение
R2 + R3 . Rl Ч- R2 -Ь R3 Отсюда
UR иион-е .(1)
В начальный момент времени напряжение на резисторе 11 URJ UHOH. Транзистор
9окажется запертым положительным потенциалом- напряжения, поданным на его эмиттер. Транзистор 10 также заперт высоКИМ уровнем напряжения на его базе.
По мере заряда конденсатора 8 напряжение на резисторе 11 (а следовательно, и на эмиттере транзистора 9) падает. В момент времени, когда напряжение на базе
транзистора 9 Убт, UR, транзисторы 9 и
10открываются и конде1 сатор 8 разряжается по цепи: положительная обкладка конденсатора 8 - эмиттер-база транзистора 10 - коллектор-эмиттер транзистора 9 - отрицательная обкладка конденсатора 8. На выходе измерителя сформируется короткий положительный импульс, длительность которого зависит от постоянной времени цепи. разряда Тр конденсатора 8. После разряда конденсатора 8 процесс повторяется.
Заряд конденсатора 8 прекращается в момент равенства напряжений U6Ti икц. U6Ti URj+UL,, (2)
где UL.(ULJ
UL - действующее значение напряжения на обмотке 7;
Ктр,- коэффициент передачи трансформатора 5;
11 UHOH RS
URj - -p -p -падение напряжения на резисторе 4.
Подставу яя расчетные формулы (1) и (2) в равенство ибт UR., получают
У.и.,К.р, и.он.аЯ,
Длительность паузы между импульсами после логарифмирования равна
tn
-ГзГп( .p,).(3)
Постоянная времени заряда конденсатора 8 вычисляется по формуле
T3 C(R4 + Ri), где С - емкость конденсатора 8.
Для получения большей скважности последовательности импульсов R4 выбирают такой величины, чтобы Гз Тр.
Величину резистора 12 выбирают из условия согласования с линией связи, подключаемой к выходу Вых измерителя.
И если длительность паузы согласно формулы (3) можно изменять, изменяя величину действующего значения Uigi то длительность импульса в данной схеме величина постоянная и определяется цепью разряда конденсатора 8. При Uu О выбор значений остальных величин формулы (3) позволяет.задавать начальное значение паузы (начальный период следования импульсов).
Генератор сигналов 13 вырабатывает периодические сигналы (форма сигналов /может быть синусоидальной, прямоугольной, треугольной и любой иной) для питания первичной обмотки (обмотка 15) трансформатора 14. В зависимости от положения подвижного стержня 16 во вторичной обмотке (обмотка 17) трансформатора 14 действующее значение напряжения Uii, изменяется при неизменной частоте следования сигналов. Данное напряжение ULi, UignocTynaeT на обмотку 7 трансформатора 5. который служит для гальванической развязки цепи питания транформатора 14 от остальной части схемы.
Напряжение Уц носит переменный характер. Импульс на выходе Вых измерителя появляется в момент открытия транзистора 9 и 10. Переменная составляющая напряжения UL, при открытом состоянии транзисторов 9 и 10 передается на выход Вых измерителя. Тем сэмым происходит заполнение информационного импульса положительными полуволнами переменной составляющей. Это повышает помехоустойчивость импульсов при действии как аналоговых, так и импульсных по-мех. Одновременно повышается избирательность при приеме данных импульсов. При определенном подборе частоты заполнения можно уменьшить потери при передаче информационных импульсов по длинным линиям.
Предлагаемый измеритель позволяет разносить на определенное расстояние трансформатор 14, который выполняет роль датчика положения (перемещения), и остальную часть схемы.
Частоту заполнения выбирают такой, чтобы укладывалось 3-4 периода в длительности импульсов.
Стабильность работы схемы измерителя определяется в основном стабильностью работы транзисторов 9 и 10.
Чувствительность (точность) измерителя положения определяется в основном чувствительностью (точностью) трансформатора 14. При этом установленная точность измерения остается равномерной(неизменной) в значительном диапазоне перемещений.
Таким образом, предлагаемый измеритель положения позволяет повысить помехоустойчивость вырабатываемых информационных импульсов с одновременным увеличением точности измерения при расширении диапазона перемещения объекта.
Формула изобретён и я Измеритель положения, содержащий источник опорного.напряжения, два транзистора разного типа проводимости, датчик положения и четыре резистора, при этом одни выводы первого и второго, третьего и четвертого резисторов соединены между собой, а также общую шину, отличающийся тем, что, с целью повышения помехоустойчивости и точности, в него введены первый трансформатор с двумя обмотками, конденсатор, пятый резистор, генератор сигналов, а датчик положения выполнен в виде трансформатора с подвижным стержнем и двумя обмотками, одни выводы которых соединены с общей шиной, другие выводы подключены соответственно к В)ыходу генератора сигналов и одному выводу второй обмотки первогоТрансформатора, другой вывод которой соединен с общей шиной, другой вывод второго резистора соединен с другим выводом третьего резиртора и через первую обмотку первого трансформатора подключен к базе транзистора обратной проводимости, коллектор которого подключен к базе транзистора прямой проводимости, а эмиттер соединен с другим выводом четвертого резистора и через конденсатор - с точкой соединения первого и второго резисторов и с эмиттером транзистора прямой проводимости, коллектор которого соединен с выходной шиной и через пятый резистор - с общей шиной, подключенной к соединенным между собой выводам третьего и четвертого резисторов, другому выходу генератора сигналов и другому входу источника опорного напряжения, один выход которого соединен с другим выводом первого резистора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОКТАН-КОРРЕКТОР | 1991 |
|
RU2044154C1 |
| Аналого-цифровой преобразователь | 1986 |
|
SU1388987A1 |
| УНИВЕРСАЛЬНЫЙ ДАТЧИК ПОСТОЯННОГО ТОКА С РАЗВЯЗКОЙ И НИЗКОВОЛЬТНЫМ ПИТАНИЕМ | 2013 |
|
RU2540941C2 |
| ДАТЧИК ПОСТОЯННОГО ТОКА С РАЗВЯЗКОЙ | 2012 |
|
RU2511639C2 |
| Устройство гальванической развязки | 1988 |
|
SU1637002A1 |
| ДАТЧИК ПОСТОЯННОГО ТОКА С РАЗВЯЗКОЙ | 2012 |
|
RU2528270C2 |
| МОДУЛЯТОР АМПЛИТУДНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2022 |
|
RU2783621C1 |
| Устройство для измерения электрической проводимости и магнитной проницаемости | 1989 |
|
SU1659928A1 |
| ПРЕОБРАЗОВАТЕЛЬ ДВОИЧНОГО КОДА В БИПОЛЯРНЫЙ КОД | 2002 |
|
RU2218660C2 |
| Магнитно-транзисторный ключ | 1989 |
|
SU1706032A1 |
Изобретение относится к системам автоматического управления и измерительной технике и может быть использовано для измерения или контроля положения путёмпреобразования перемещения объекта в частоту (период) следования импульсов, пара- метрь! которых (длительность и амплитуда) остаются неизменными. Цель изобретения - повышение помехоустойчивости и точности измерителя положения путем преобразования действующего переменного напряжения, снимаемого-с вторичной обмотки 17 датчика 14 положения (перемещения) в частоту (период) следования импульсов, и заполнения последних периодическими сигналами, превышающими на несколько порядков частоту следования информационного импульсного сигнала. Измеритель положения как самостоятельное устройство может применяться в составе измерительных и управляющих систем. 1 ил.
| Автогенераторный датчик перемещения | 1983 |
|
SU1201683A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
