Изобретение относится к бурению скважин с плавучих глубоководных буровых установок и буровых судов, в частности к устройствам контроля параметров морско - го стояка.
Известно устройство, применяемое в нефтяной и геологоразведочной технике для определения азимутального угла скважины, содержащее соединенные световодом глубинную и наземную части. В глубинную часть входит оптическая система с магнитной стрелкой, отражателем, диском, кольцевым сферическим уровнем, светофильтрами, а в наземную - источник света, светоотделительный блок, фотоприемники, блок аналого-цифровых преобразователей и цифровой преобразователь. В устройстве происходит преобразование величины азимутального угла в интенсивность светового потока пропорционально величине зенитного угла.
Недостатками известного устройства являются: ограниченная область применения вследствие применения в нем магнитной стрелки, взаимодействующей с большими массами металла, отсутствие по-, казаний в центральной части кольцевого отражателя и кольцевого сферического уровня, а также необходимость для каждой глубинной части иметь индивидуально каждую наземную часть, соединенные между собой отдельными световодами, что не позволяет применять его в системах контроля угловых отклонений морских стояков.
Известна система контроля угла отклонения морского стояка и подводного блока
ю о
устьевого оборудования, содержащая подводные спаренные датчики перемещений, помещенные в корпусе и размещенные на блоке превенторов и примыкающей к нему секции морского стояка, электрические кабели, монтируемые на морском стояке, и блок управления, расположенный на плавучей буровой установке, Датчики, снимающие замеры по двум осям, генерируют электрические сигналы пропорционально величине отклонения от вертикали. Полученный сигнал по электрическим кабелям передается на поверхность в блок управления, имеющий цифровые индикаторы и дис- плей, на котором демонстрируется положение блока превенторов и величина отклонения морского стояка от вертикали и относительный угол между превенторным блоком и морским стояком в двух плоскостях. Показания натяжения и изгиба морского стояка дают отдельно расположенные датчики деформации, установленные на морском стояке и связанные посредством электрических кабелей с блоком управления, где информация отражается на цифровых индикаторах. Известное техническое решение по своим существенным признакам наиболее близко к.предлагаемому изобретению.
Недостатками системы контроля являются ограниченное применение системы контроля по всей длине морского стояка ввиду необходимости установки только спаренных датчиков, где один из них является базовым для другого и должен быть неподвижным в пространстве, сложности монтажа электрических кабелей индивидуально для каждого датчика. Существующая система не позволяет получить информацию об отклонениях в трехмерном изображении вдоль секций всего морского стояка, в то время когда морской стояк под действием морских течений, ветров, приливов и отливов, изменений плавучести буровой установки, изменений удельного веса бурового раствора, перемещений буровой установки отточки бурения,измененийузла наклона шарового компенсатора и натяжения подвергается воздействию этих факторов по всей длине, что вызывает его неравномерный изгиб и отклонения.
Цель изобретения - повышение надежности и точности системы контроля морского стояка путем непрерывного получения информации в долговременном режиме.
Указанная цель достигается тем, что секции морского стояка дополнительно снабжены источником светового излучения, блоком световодов с оптическими разветви- телями, полыми герметичными цилиндрами, датчики отклонения выполнены в виде отдельных световодов с приемными блоками светового сигнала на выходах, отдельные световоды связаны с блоком
световодов через оптические разветвите- ли, расположены отвесно и помещены в полые герметичные цилиндры, жестко связанные с каждой секцией морского стояка, а приемные блоки светового сигнала,
0 размещенные в полых герметичных цилиндрах, связаны с ЭВМ посредством низковольтных кабелей.
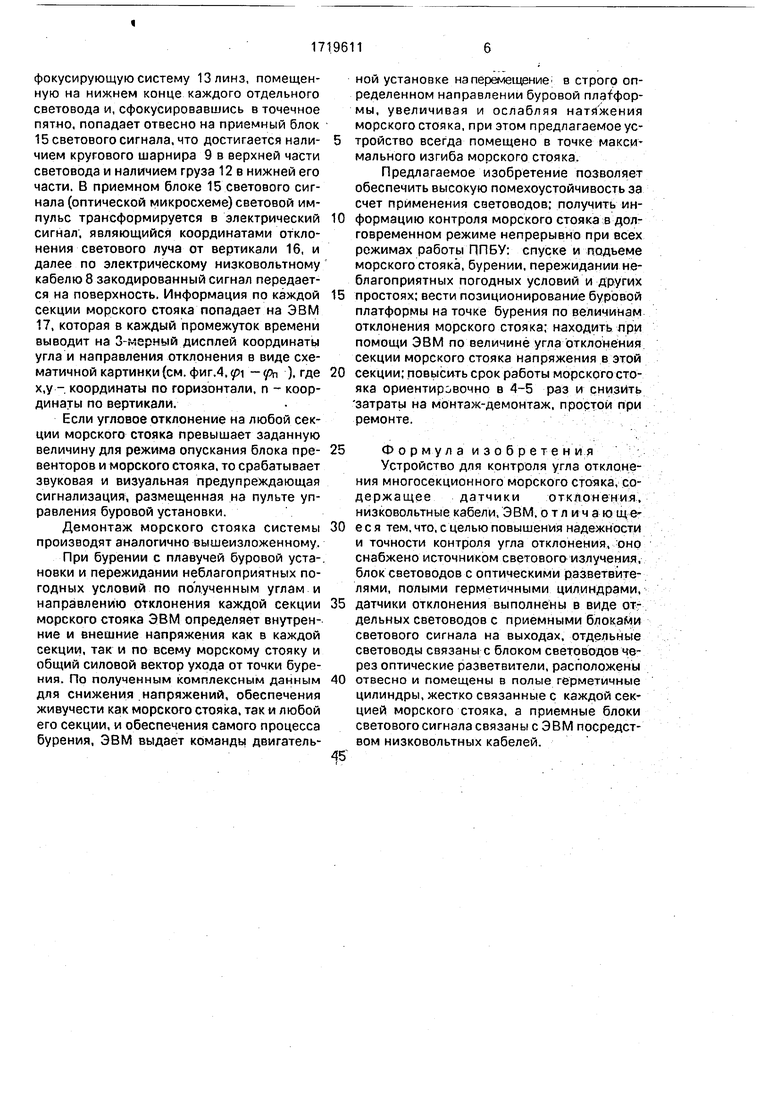
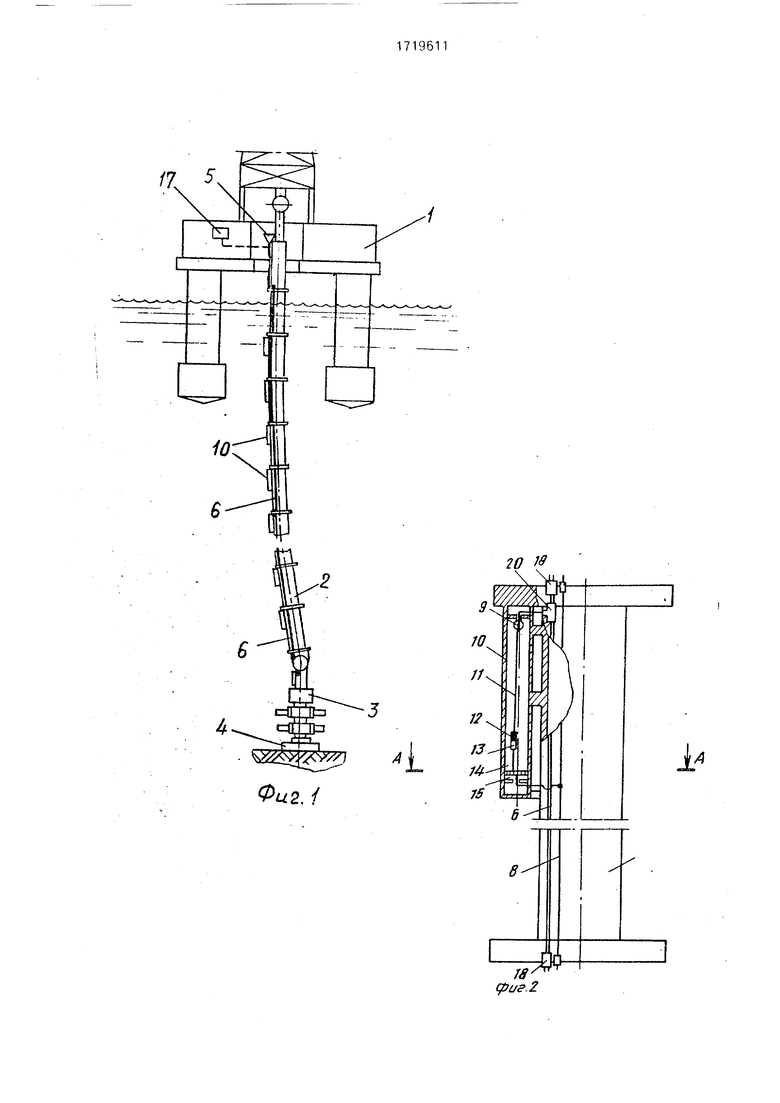
На фиг.1 схематически изображено уст- ройстодля контроля угла и направления от5 клонения морского стояка, общий вид; на фиг.2 - схема оснащения одной секции морского стояка; на фиг.З - разрез А-А на фиг.2; на фиг.4 - схематическая картинка координат угла и направления отклонения
0 на дисплее ЭВМ,
Устройство для контроля морского сто- яка содержит буровую платформу 1, соединенную посредством набора секций 2 морского стояка с блоком 3 превенторов,
5 находящимся на устье скважины 4. От источника 5 светового излучения по блоку 6 световодов, прикрепленному к корпусу секции морского стояка 7, отдельные светоао- ды 11 помещены через круговой шарнир 9 в
0 полый герметичный цилиндр 10, жестко связанный с корпусом секции морского стояка 7. На нижнем конце отвесный световод 11 снабжен грузом 12 и системой 13 линз, а в нижней части 14 полого корпуса Юимеет5 ся приемный блок 15 светового сигнала, от которого проложен электрический кабель 8 нз ЭВМ 17, расположенную на плавучей буровой установке 1.
Устройство работает следующим обра0 зом,
При опускании блока 3 превенторов, на устье скважины 4 секции 2 морского стояка собираются одна с другой посредством известных типов соединений(муфтовым,резь5 бовым и др.) Одновременно идет соединение блока 6 световодов посредством оптических разъемов 18. При спуске блока 3 превенторов совместно с набором ,секций 2 морского стояка производится
0 контроль угла отклонения многосекционного морского стояка включением в действие, а именно: подключается блок 6 световодов к источнику 5 светового излучения, например ижекционному лазеру или светодиоду.
5 Далее луч света, пройдя оптические разъемы 18, попадает через оптические развет- вители 20 по каждому отвесному световоду 11, помещенному в полый герметичный цилиндр 10, жестко связанный с корпусом секции морского стояка 7, попадает в
фокусирующую систему 13 линз, помещенную на нижнем конце каждого отдельного световода и, сфокусировавшись в точечное пятно, попадает отвесно на приемный блок 15 светового сигнала, что достигается наличием кругового шарнира 9 в верхней части световода и наличием груза 12 в нижней его части. В приемном блоке 15 светового сигнала (оптической микросхеме) световой импульс трансформируется в электрический сигнал, являющийся координатами отклонения светового луча от вертикали 16, и далее по электрическому низковольтному кабелю 8 закодированный сигнал передается на поверхность. Информация по каждой секции морского стояка попадает на ЭВМ 17, которая в каждый промежуток времени выводит на 3-мерный дисплей координаты угла и направления отклонения в виде схематичной картинки (см. фиг,4, - рп ), где х,у- координаты по горизонтали, п - координаты по вертикали.
Если угловое отклонение на любой секции морского стояка превышает заданную величину для режима опускания блока пре- венторов и морского стояка, то срабатывает звуковая и визуальная предупреждающая сигнализация, размещенная на пульте управления буровой установки.
Демонтаж морского стояка системы производят аналогично вышеизложенному.
При бурении с плавучей буровой уста-, новки и пережидании неблагоприятных погодных условий по полученным углам и направлению отклонения каждой секции морского стояка ЭВМ определяет внутренние и внешние напряжения как в каждой секции, так и по всему морскому стояку и общий силовой вектор ухода от точки бурения. По полученным комплексным данным для снижения .напряжений, обеспечения живучести как морского стояка, так и любой его секции, и обеспечения самого процесса бурения, ЭВМ выдает команды двигательной установке на перемещение в строго определенном направлении буровой платформы, увеличивая и ослабляя натяжения морского стояка, при этом предлагаемое ус5 тройство всегда помещено в точке максимального изгиба морского стояка.
Предлагаемое изобретение позволяет обеспечить высокую помехоустойчивость за счет применения световодов; получить ин10 формацию контроля морского стояка в долговременном режиме непрерывно при всех режимах работы ППБУ: спуске и подъеме морского стояка, бурении, пережидании неблагоприятных погодных условий и других
15 простоях; вести позиционирование буровой платформы на точке бурения по величинам отклонения морского стояка; находить лри помощи ЭВМ по величине угла отклонения секции морского стояка напряжения в этой
20 секции; повысить срок работы морского стояка ориентировочно в 4-5 раз и снизить затраты на монтаж-демонтаж, простои при ремонте.
25 Формул а изо бретени я
Устройство для контроля угла отклонения многосекционного морского стояка, содержащее датчики отклонения; низковольтные кабели, ЭВМ, отличаю щ е30 е с я тем. что, с целью повышения надежности и точности контроля угла отклонения, -оно снабжено источником световога излучения, блок световодов с оптическими разветвите- лями, полыми герметичными цилиндрами,
35 датчики отклонения выполнены в виде отдельных световодов с приемными блоками светового сигнала на выходах, отдельные световоды связаны с блоком световодов через оптические разветвители, расположены
40 отвесно и помещены в полые герметичные цилиндры, жестко связанные с каждой секцией морского стояка, а приемные блоки светового сигнала связаны с ЭВМ посредством низковольтных кабелей.
451
П. 5
0U2. i
10
6 Id S Фиг.З
iS
Фиг Л

| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания подводного устьевого оборудования | 1978 |
|
SU744107A1 |
| ПОДВОДНАЯ БУРОВАЯ УСТАНОВКА И ОПОРНАЯ ПЛАТФОРМА ДЛЯ НЕЕ | 1995 |
|
RU2081289C1 |
| Плавучая буровая установка | 1982 |
|
SU1102879A1 |
| Соединитель подводного устьевого оборудования | 1985 |
|
SU1357539A1 |
| БУРОВАЯ УСТАНОВКА, УСТАНОВЛЕННАЯ НА МОРСКОМ ДНЕ И ПРЕДНАЗНАЧЕННАЯ ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2006 |
|
RU2365730C2 |
| СИСТЕМА И СУДНО ДЛЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ ШЕЛЬФОВЫХ МЕСТОРОЖДЕНИЙ | 2005 |
|
RU2330154C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПЛАШКИ С ПРИВОДОМ ОТ ДВИГАТЕЛЯ, ИСПОЛЬЗУЮЩИЙ ДАВЛЕНИЕ, ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ДАВЛЕНИЕМ В СКВАЖИНЕ | 2016 |
|
RU2695579C1 |
| Способ предотвращения газопроявлений на скважинах с подводным устьем | 1990 |
|
SU1795078A1 |
| ПЛАВУЧАЯ ПЛАТФОРМА И СПОСОБ УПРАВЛЕНИЯ ЕЮ | 2009 |
|
RU2502629C2 |
| Датчик давления | 1990 |
|
SU1760417A1 |
Изобретение относится к бурению скважин с плавучих глубоководных буровых установок и судов. Цель изобретения - повышение надежности и точности контроля угла отклонения. Устройство содержит датчики отклонения, источник светового излучения, блок 6 световодов с оптическими разветвителями (ОР)21, низковольтные кабели 8, ЭВМ. Датчики отклонения выпол- нены в виде отдельных световодов (ОС) 11 с приемными блоками (ПБ) 15 светового сигнала на выходах, ОС 11 связаны с блоком 6 световодов через ОР 21, расположены отвесно и помещены в полые герметичные цилиндры 10, жестко связанные с каждой секцией 2 морского стояка, а ПБ 15 светового сигнала связаны с ЭВМ посредством кабелей 8. Луч света от источника светового излучения попадает через ОР 21 по ОС 11 на ПБ 15. В ПБ 15 световой импульс трансформируется в электрический сигнал, являю щийся координатами отклонения светового луча от вертикали, и далее по кабелю 8 закодированный сигнал передается на поверхность в ЭВМ. 4 ил. со с
| Устройство для определения азимутального угла скважины | 1986 |
|
SU1382934A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| ВОР AND RISER INCLINOMETR | |||
| Composite catalog, США, 1976-1977, p | |||
| ПРИБОР ДЛЯ СОРТИРОВКИ МОНЕТ ПО ВЕСУ | 1925 |
|
SU3414A1 |
