Изобретение относится к плавучим буровым установкам и может быть использовано для проходки глубоких скважин на шельфе моря. Известна плавучая буровая установк включающая плавсредство, рабочую пло щадку, подводнзто часть, состоящую из направляющего механизма и привода .вр щения колонны бурильных труб с пород разрущакяцим наконечником, надводную часть, включающзпо средства для спуско-подъема колонны бурильных труб СП Недостатком данной установки является то, что осевое усилие на забо в ней создается лишь за счет веса самого бурового снаряда, оно не может регулироваться в процессе бурения, кроме того, качка плавсредства при волнении моря затрудняет ведение буровых работ, Известна также плавучая морская буровая установка, включающая плавсредство с рабочей площадкой и колод цем, буровой агрегат, состоящий из подводной части, включающей привод, средства для стабилизации вертикального положения, средства для спускоподъема колонны бурильных труб с породоразрушающим наконечником, и надводной части, со средствами спускоподъема колонны бурильных -труб С 23. За счет конструктивного исполнени на работу подводной части установки не оказывают влияния морские факторы (качка плавсредства), однако известная установка обладает недостатком, заключающимся в том, что нагрузка на забой создается также только за счет веса бурильной колонны, она не может регули1 оваться в процессе буре ния ни за счет подводной, ни за счет надводной частей установки. . ..™.:.. водительности и надежности работы установки. Поставленная цель достигается тем что в плавучей буровой установке, включающей плавсредство с рабочей площадкой и колодцем, буровой агрегат, состоящий из подводной части, включающей привод, средства для стабилизации вертикального положения средства для спуско-подъема колонны бурильных труб с породоразрушающим наконечником, и надводной части со средствами спуско-подъема колонны, привод подводной части выполнен в в 1 92 ч де двигателей вращения и линейного перемещения, а средства спуско-подъема надводной части выполнены в виде двигателя линейного перемещения. При этом двигатель вращения выполнен в виде асинхронного двигателя, ротором которого является ферромагнитная бурильная труба, а двигатель линейного перемещения;выполнен в виде линейно-асинхронного двигателя. Кроме того, с целью регулирования давления на забой, породоразрушающий наконечник снабжен тензодатчиком измерения давления на забой скважины, которьй связан с источником питания и передающим устройством. С целью регулирования кольцевого зазора между бурильной трубой и внутренним каналом подводной части привода, последний снабжен датчиками, связанными со средствами стабилизации вертикального положения подводной части установки. На фиг 1 показана плавучая буровая установка, общий вид, на фиг.2 подводная часть привода, продольный разрез, на фиг.З - надводной части привода, продольный разрез.на фиг.4блок-схема системы стабилизации положения подводной части привода. Плавучая буровая установка, включает плавсредство 1 с рабочей площадкой 2, буровую вьшку 3, колонну 4, привод, выполненный из двух, частей: надводной.5 и подводной 6, причем надводная часть 5 выполнена в виде двигателя 7 подачи, а подводная часть 6 выполнена в виде двигателей вращения 8 и линейного перемещения 9 колонны труб 4, причем плавсредство 1 содержит сквозной вертикальньй колодец 10, внутренний диаметр которого равен внешнему диаметру подводной части 6 привода колонны труб 4. подводная часть 6 привода снабжена системой 11 стабилизации положения, а внутренняя часть сквозного вертикального колодца снабжена цилиндрической подушкой 12 из упругого износоустойчивого материала. На рабочей площадке 2 плавсредства 1 установлено неподвижное ферромагнитное кольцо 13, на котором установлено подвижное магнитное кольцо 14, на котором жестко своим основанием укреплена буровая вышка 3. Подвижное магнитное кольцо 14 снабжено шарикоподшипниками 15 и роликами 16, расположенными по окружности внешней цилиндрической поверхности кольца 14. Колонна труб 4 выполнена из ферромагнитной трубы 17 и электропроводящей внешней трубы 18, например, дюралюминиевой. Надводная часть 5 привода выполнена из трубы 19, внутри которой вставлен двигатель 20 подачи, представляющий собой индуктор линейного цилиндрического многофазного асинхрон ного двигателя 21, состоящего из магнитопровода 22 с пазами 23, в которых уложена многофазная обмотка 24, защищенная внутренней трубой 25, выполненной из износоустойчивого немагнитного материала, например, из высокопрочного капрона. Подшипники 26 и 27 служат для обеспечения свободного вращения и линейного перемещения колонны труб 4 относительно индуктора линейного цилиндрического многофазного асинхрон ного двигателя 21, магнитопровод которого вьтолнен из шихтованной электротехнической стали, а обмотка 24 выполнена трехфазной. Колонна труб 4 снабжена буровой коронкой 28, а плавсредство 1 в точк бурения закреплено швартовыми концами 29 с якорями 30 к морскому дну. Неподвижное кольцо 13 снабжено ог раждающим барьером 31 с захватами 32 для фиксации подвижного кольца 14. Плавучая буровая установка снабже силовой установкой 33 для вращения гребного вала 34 и винта 35, а также блоком 36 питания и-блоком 37 управления всеми технологическими процессами, связанными с бурением скважины Надводная часть 5 привода установ лена посредством упругой связи 38, в полненной например, из высокопрочног каучука или капрона, на буровой мавьш1ке 3 вдоль ее продольной оси. Под водная часть 6 привода колонны труб 4 установлена на морском дне при помощи винтов 39 с опорами 40, соедине ными между собой шарнирно, что позво ляет подводной части 6 приспосаблйва ся к неровностям морского дна. Подводная часть 6 привода снабжен системой 11 стабилизации положение относительно колонны труб 4 и относи тельно морского дна и включает гайки 41, навинченные на резьбу винтов, а также двигатели 42 поворота гаек, рас положенные в корпусе 43 подводной части 6 привода, и датчики 44 зазора, например, индукционного типа. Гайки 41 выполнены таким образом, чтобы обеспечивалось их поступательно-вращательное движение относительно винтов 39 и поступательное осевое движение относительно двигателей 42 при включении этих двигателей в сеть питания. Датчики 44 зазора служат для подачи сигналов при отклонении воздушного зазора между колонной труб 4 и подводной частью 6 привода от номинального значения в ту или иную сторону, расположены по окрз ности из износоустойчивого антикоррозийного материала. Двигатель 8 вращения колонны труб 4 включает индуктор, вьтолненный из шихтованной электротехнической стали с пазами 45 для трехфазной обмотки 46, размещенный внутри цилиндра 47, выполненного из нержавеющей стали. Двигатель 9 линейного перемещения колонны труб 4 включает магнитопровод 48 иЗДуктора 49, вьтолненный из листовой электротехнической стали, в котором вьшолнены кольцевые пазы 50 для кольцевой многофазной, например трехфазной обмотки 51, и размещен внутри вдоль общей продольной оси цилиндра 47. Внутренняя труба 52 выполнена из немагнитного износоустойчивого материала, например, из высокопрочного пластика и служит для защиты двигателей 8 и 9 от внешней агрессивной среды. Все токоведуш:ие части конструкции выполнены в морском исполнении. Датчики 44 зазора расположены на торцах двигателей 8 и 9 и образуют кольца 53 и 54, которые кабелем 55 соединены с устройством 56 управления и двигателями 42 вращения гаек 41 вокруг винтов 39 при работе устройства системы 11 стабилизации положения относительно колонны труб 4 и морского дна. Колонна труб 4 является также ротором двигателя 8 вращения, двигате5 лей подачи 7 и линейного перемещения 9. Погружные кабели 57 и 58 служат для подачи электроэнергии многофазного, например трехфазного тока и 1 к двигателям 8,9 и 42, а также для управления работой системы 11 стабилизации. Днище колодца 10 снабжено шторками 59 с шарнирами 60 и приводом 61/ для-их закрытия и открьшания. В теле коронки 28 встроен тензодатчик 62 для измерения давления коронки 28 на забой скважины и соединенный проводниками 63 с источником 64 питания встроенного типа, а также с передающим устройством 65, вмонтированным в колонну труб 4 вбли зи приемника 66, расположенного на торце двигателя 9. Приемник 66.служит для приема сигналов датчика 62 и соединен с бло ком 37 управления, предназначенным для управления всеми технологическими процессами по бурению на шельфе морей. Подшипники 67 и 68 служат для обеспечения вращательного и поступательно-вращательного движения колонны труб 4 относительно подводной части 6 привода при всех режимах работы устройства. Плавучая буровая установка работа следукнцим образом. Для прихрда плавсредства в точку бурения вклйчают в работу силовую ус новку 33. После прихода в точку буре ния гребной вал 34, а также винт 35 отключают, а силовая установка 33 ра ,ботает для обеспечения электроэнер гией блока 36 питания и блока 37 управления всеми технологическими процессами по бурению. Затем отдают шва товые концы 29, и якорями 30 закрепляются к морскому дну. Буровую вьш1ку 3 освобождают от фи сации захватами 32 к барьеру 31 непо движного кольца 13 после того, как колонна труб будет вставлена в приво и совмещена вдоль его осевой линии, а такж включен двигатель 7 подачи н водной части 5 привода в режим медле ного опускания колонны труб 4 до упо коронки 28 в морское дно. При опускании колонны труб 4 вклю чают также и двигатель 9 линейного перемещения в режим работы, обеспечи вающий плавное опускание колонны тру 4, так как в это время подводная час 6 привода находится в транспортном положении внутри колодца 10. После спуска колонны бурильных тр 4 до дна, шторки 59 на днище колодца 96 10 открываются и подводная часть 6 привода под дейст/вием усилия. двигателя 9 линейного перемещения плавно садится на морское дно. Усилие, двигателя 9 линейного перемещения подводной части 6 привода регулируется блоком 37 управления таким образом, чтобы обеспечивалось безопасное опускание подводной части 6 привода на морское дно с последующей стабилизацией ее положения. Для производства бурения включают двигатель 8 вращения подводной части 6 привода, а также двигатели подачи 7 надводной части и линейного перемещения 9 подводной части привода для того, чтобы обеспечивались оптимальные условия режима бурения. Если при этом окажется, что вес колонны труб необходимого давления на забой скважины, то двигатели подачи 7 и линейного перемещения 9 включают одновременно для создания дополнительного давления на забой скважины. Если при этом вес колонны труб 4 превосходит необходимое усилие давления на забой скважины, то двигатель 7 подачи и двигатель 9 линейного перемещения включают вместе либо по отдельности в режим подъема колонны труб 4. Для определения давления на забой .служат тензодатчики 62, закрепленные в теле коронки 28 и соединенные посредством специальных проводников 63 с источником 64 питания и передающим устройством 65. Сигнал с передающего устройства 65 поступает на приемник 66 и затем на блок 37 управления. Режим работы всех двигателей привода, состоящего из подводной и надводной частей, определяется на ЭВМ в зависимости от условий, в которых производится бурение, а также в завиимости от характера работы устройства. Принцип действия двигателя 8 вращения основан на том, что после включения обмотки 46 в сеть трехфазного тока в индукторе образуется вращающееся магнитное поле, индуктирующее ЭДС, и токи в электропроводящей трубе 18 колонны труб 4. В результате взаимодействия токов трубы 18 с вращающимся полем индуктора колонна труб 4 вместе с коронкой 28 придет во вращение вокруг продольной оси. Для изменения направления вращения колонны труб 4 на обратное необходимо поменять местами две какие-нибудь фазы обмотки 46 на клеммах блока 36 питания.Л Двигатель 9 линейного перемещения работает по принципу линейного асинхронного двигателя. После включения его обмотки 51 в сеть трехфазного тока в индукторе 49 образуется линейнобегущее магнитное поле, направленное вдоль продольной оси колонны труб 4.
В результате взаимодействия линейно-бегущего магнитного поля индуктора 49 с трубой 18 в последней индуктируются ЭДС и токи, в результате взаимодействия которьк с полем индуктора 49 возникает линейное усилие, действующее на колонну труб 4 вдоль ее оси. Усилие может быть направлено вертикально вверх или вниз. Это зависит от направления движения линейно-бегущего магнитного поля индуктора 49, если поле индуктора 49 движется вверх, то и усилие в колонне труб 4 будет иметь направление снизу вверх, и, наоборот, при движении поля индуктора 49 вниз, это .усилие будет способствовать увеличению давления колонны труб 4 на забой 30 скважины. Для изменения направления движения линейно-бегущего магнитного поля индуктора 49 необходимо поменять местами две какие-либо фазы обмотки 51 на клеммнике блока 36 питания. Блок 37 управления вместе с ЭВМ обеспечивает необходимую очередность ;и.порядок работы всех двигателей. При нарушении равномерности воздуш ного зазора в пространстве между колонной труб 4 и внутренней изолирующей трубой 52 подводной части 6 привода срабатывают датчики 44 зазора, который благодаря изменению их индуктивности выдают сигнал, который по кабелю 55 передается на устройство 6 управления двигателями 42, при помощи которых вращаются гайки 41, поднимающие или опускающие подвижную часть до тех пор, пока не выровняется воздушный зазор между кольцами 53,54 и трубой 1 8 . Таким образом, стабилизация положения подводной части 6 привода относ тельно морского дна и колонны труб 4 производится за счет работы системы
5 привода, обеспечивается стабилизация надводной части плавучей буровой установки при воздействии волновых факторов моря. При зтом плавсредство
может подвергаться бортовой, килевой, поперечно-горизонтальной, продольно горизонтальной качке и рысканью, а колонна труб 4 с надводной частью 5 привода будет находиться в точке бурения скважины.
Подшипники 26,27,67 и 68 обеспечивают свободное вращение вокруг продольной оси колонны труб 4, а также ее продольное смещение при спуске или подъеме.
По окончании процесса бурения производят подъем подводной части буровой установки, при этом все работы, связанные с подъемом, осуществляются с по11, которая обеспечивает постояиство воздушного зазора между двигателями 8,9 и колонной труб. Благодаря наличию магнитной связи ПоДвизкного кольца 14 с закрепленной на нём вышкой 3 с неподвижным ферромагнитйьм кольцом 13, закрепленным на рабочей площадке плавсредства, а также благодаря наличию упругой свяэй 38 между вьшпсой и надводной частью мощью ЭВМ и блока 37 управления. При этом вначале поднимают подводную часть 6 привода, для чего используют двигатель 9 линейного перемещения, который благодаря наличию линейно-бегущего магнитного поля с токами трубы 18 поднимается вверх и увлекает за собой всю подводную часть 6 привода. При достижении подводной части 6 установки колодца 10 плавсредства закрываются шторки 59, которые приводятся в действие приводом 61 с помощью ЭВМ и устройства 37 управления. Затем поднимают колонну труб 4, включив в работу два двигателя: двигатель 7 по-д чи надводной части 5 привода, а так двигатель 9 линейного перемещения подводной части 6 привода. После подъ ема колонны труб 4, демонтажа ее и укладки ее на рабочей площадке 2 плавсредства 1 двигатели 7 и 9 отключают, а вьш1ку 3 захватами 32 фиксируют неподвижно к барьеру 31. Использование изобретения позволит повысить производительность работы установки с повьш1ением ее надежно(;ти за счет обеспечения возможности управления таким важным фактором в бурении, как регулирование давления на забой скважины в процессе ее бурения. Одновременно, благодаря наличию системы стабилизации надводной и п0д- 5 водной частей буровой установки относительно колонны бурильных труб, повышается надежность работы плавучей буровой установки при воздействии волновых факторов моря.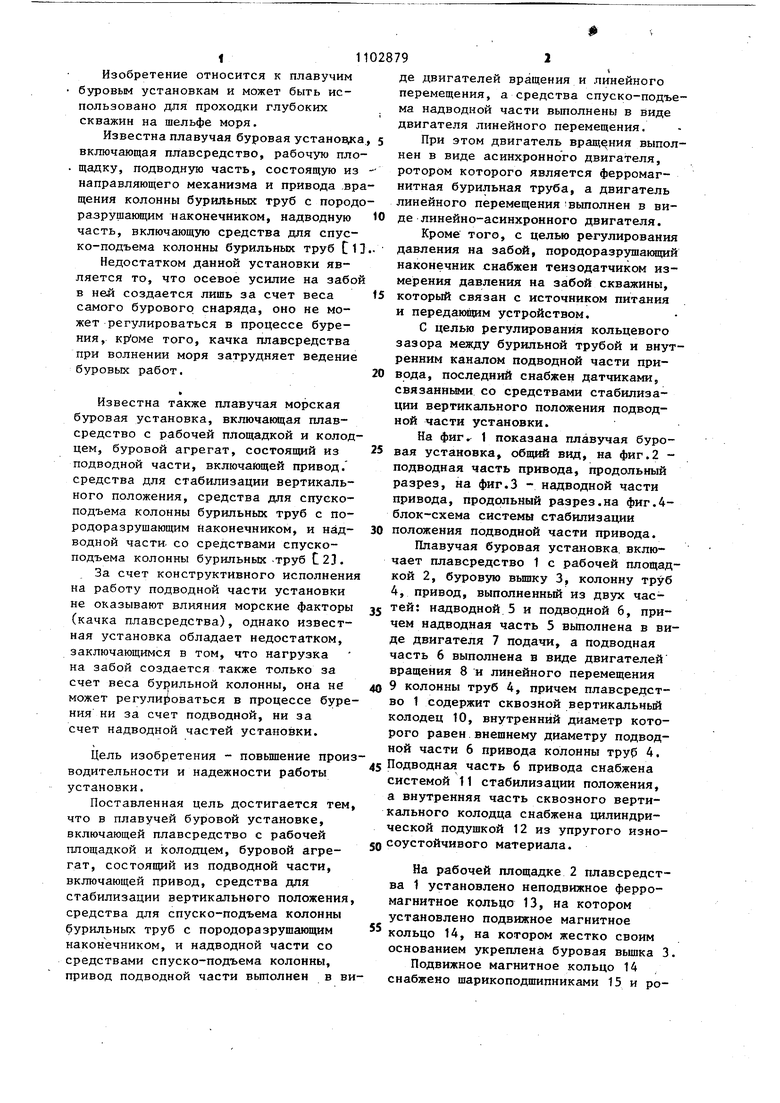



| название | год | авторы | номер документа |
|---|---|---|---|
| Плавучая буровая установка | 1982 |
|
SU1086113A1 |
| Технологический комплекс для морского кустового бурения | 2019 |
|
RU2731010C1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| СПОСОБ МОНТАЖА ТРУБОПРОВОДА, СОЕДИНЯЮЩЕГО ПОДВОДНОЕ МЕСТОРОЖДЕНИЕ С ПЛАТФОРМОЙ, С МОРСКОЙ ДОБЫВАЮЩЕЙ УСТАНОВКИ | 2006 |
|
RU2403378C2 |
| Комплект инструментов для подвески труб бурильной колонны в устье подводной скважины | 2024 |
|
RU2819216C1 |
| Устройство для вращения буровой колонны | 1982 |
|
SU1071737A1 |
| ПОДВОДНАЯ БУРОВАЯ УСТАНОВКА И ОПОРНАЯ ПЛАТФОРМА ДЛЯ НЕЕ | 1995 |
|
RU2081289C1 |
| УСТАНОВКА ДЛЯ ПОДВОДНОГО БУРЕНИЯ | 1998 |
|
RU2149249C1 |
| СИСТЕМА И СПОСОБ КОЛОНКОВОГО БУРЕНИЯ СО СЪЕМНЫМ КЕРНОПРИЕМНИКОМ | 2009 |
|
RU2493348C2 |
| Направляющее устройство плавучей буровой установки | 1979 |
|
SU870658A1 |

1. ПЛАВУЧАЯ БУРОВАЯ УСТАНОВКА, включающая плавсредство с рабочей площадкой и колодцем, буровой агрегат, состоящий из подводной части; включающий привод, средства для стабилизации вертикального положения, средст- ва для спуско-подъема колонны бурильных труб с породоразрушающим наконечником, и надводной части со средствами спуско-подъема колонны, отличающаяся тем, что, с целью повышения производительности и надежности работы, привод подводной части выполнен в виде двигателей вращения и линейного перемещения, а средства спуско-подъема надводной части вьшолнены в виде двигателя линейного перемещения. 2.Установка по п.1, отличающаяся тем, что двигатель вращения вьшолнен в виде асинхронного двигателя, ротором которого является ферромагнитная бурильная труба, а двигатель, линейного перемещения выполнен в виде линейно-асинхронного двигателя. 3.Установка по пп.1 и 2, о тличающаяся тем, что, с целью регулирования давления на забой, . породоразрушающий наконечник снабжен тензодатчиком измерения давления (Л на забой скважины, который связан с источником питания и передающим устройством. 4.Установка по пп.1-3, отличающаяся тем, что, с целью регулирования кольцевого зазора между бурильной трубой и внутренним кана о лом подводной части привода, послед1C ний снабжен датчиками, связанными со средствами стабилизации вертикаль00 ного положения подводной части уста 1 новки . 
IfZ
1
42
«2
Фиг. д.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США №3603407, кл | |||
| Ручной прибор для загибания кромок листового металла | 1921 |
|
SU175A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ЗАТАПЛИВАЕМЫЙ ПОНТОН МОРСКОЙ БУРОВОЙ УСТАНОВКИ | 0 |
|
SU376549A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
