Изобретение относится к регистрации механических перемещений и может быть использовано в оборудовании, оснащенном средствами автоматического контроля его работоспособности.
Датчики положения служат для дистанционной регистрации процессов перемещения какого-либо механизма и управления им,
Существующие датчики положения осуществляют регистрацию конечного положения механизма путем выдачи электрического сигнала высокого или низкого уровня напряжения.
Наиболее близким к предлагаемому является датчик БВК-24 (бесконтактный выключатель конечного напряжения). Это датчик индуктивного типа. Принцип его работы основан на срыве высокочастотных колебаний в электрическом контуре при внесении металлической пластины в зону срабатывания датчика. При этом на выходе
датчика происходит изменение уровня напряжения сигнала.
Существенным недостатком известного датчика является отсутствие информации об исправности самого датчика. Неисправный датчик выдает ложный сигнал о состоянии контролируемого механизма, что приводит к выходу его из строя.
Цель изобретения - повышение ремонтопригодности датчика.
Для достижения поставленной цели в датчик, содержащий излучатель,приемник света, предварительный усилитель, частот- нозадающую цепь и оконечный усилитель, включенные последовательно между выходом приемника и входом излучателя, дополнительно введены последовательно соединенные приемник света, предварительный усилитель и частотнозадающая цепь.
На фиг. 1 приведена структурная схема датчика положения рабочего органа меха(Л
с
ю
00
ю
СлУ
низма; на фиг. 2 - пример конкретного выполнения датчика, его принципиальная схема; на фиг. 3 - принцип работы автогенерирующего мультивибратора на основе триггера Шмидта; на фиг. 4 - передаточные характеристики триггера Шмидта; на фиг. 5 - расположение светодиодов в корпусе датчика; на фиг. 6 - диаграммы выходного сигнала датчика.
Датчик положения рабочего органа механизма содержит излучатель 1, каналы оптической связи айв, приемники света 2 и 5, предварительные усилители 3 и 6, частотно- задающие цепи 4 и 7, линии связи end выходной усилитель 8, линию связи е с внешним устройством |, Элементы 1,2,3,4, 8, соединенные последовательно линиями связи а, с, е, образуют первый генератор прямоугольных колебаний со скважностью T/t 5: 20, что соответствует состоянию логического О датчика (Т-период колебаний выходного сигнала датчика, t - время включенного состояния датчика). Элементы 1, 5, 6, 7, 8, соединенные последовательно линиями связи в, d, е, образуют второй генератор прямоугольных колебаний со скважностью T/t 1,005, что соответствует состоянию логической единицы датчика.
В каждый момент времени работает только один из каналов оптической связи (а или в) и генерирует прямоугольные импульсы только один из генераторов.
Скважность .импульсов определяет логическое состояние датчика, а наличие импульсов свидетельствует о его исправности.
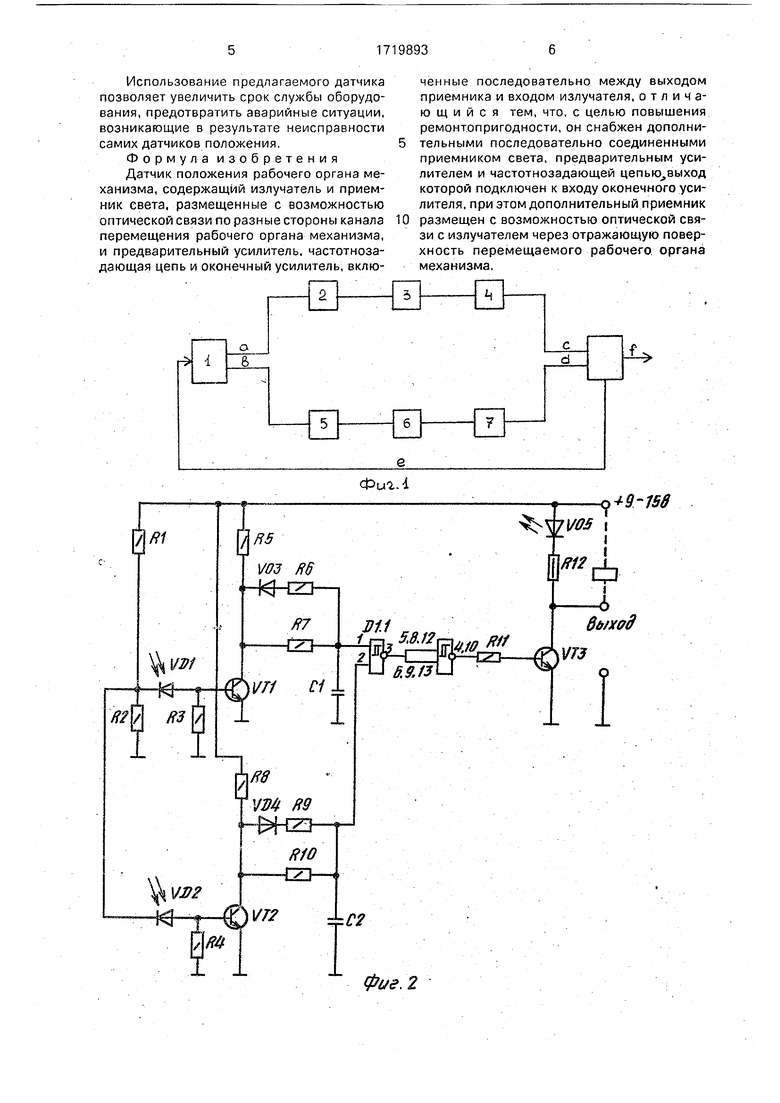
На фиг. 2 приведена принципиальная схема датчика положения рабочего органа механизма. Схема состоит из инфракрасного излучателя на светодиоде VD5, приемников инфракрасного излучения на светодиодах Ш1 и VD2, усилителей на транзисторах VT1 и VT3, частотнозадающих цепочек R6, R7, С1 и R8, R9, RIO, C2, порогового элемента D1, усилителя тока на транзисторе VT3 и линии внешней связи для подключения электромагнитного реле или электронного устройства.
Работа схемы несколько похожа на работу автогенерирующего мультивибратора на основе триггера Шмидта, представленного на фиг. 3.
Логические элементы на основе триггера Шмидта имеют внутреннюю положительную обратную связь и передаточную характеристику со значительным гистерезисом (фиг. 4), Как видно из передаточной характеристики, триггер имеет порог
включения и порог выключения, причем
ивкл ивык л,
В.исходном состоянии конденсатор С разряжен () и напряжение на входе
меньше ив кл, а на выходе логического элемента устанавливается напряжение высокого уровня. Конденсатор С заряжается через резистор R до напряжения включения Овкл и при достижении порога включения логический элемент меняет свое состояние на противоположное, на выходе устанавливается напряжение низкого уровня. Начинается разряд конденсатора через резистор R до напряжения ивкл, состояние выхода снова
меняется, т.е. на выходе схемы возникают прямоугольные колебания, частота которых определяется параметрами RC-цепочки.
В принципиальной схеме, представленной на фиг. 2, колебания возникают по аналогичному принципу, но с целью получения колебаний с резко отличающейся скважностью применены более сложные RC-цепоч- ки: R7, R6, С1 и R8, R9, R10. С2. Транзистор / VT2, частотнозадающая цепочка R8, R9, R10,
С2, триггер D1, усилитель тока на транзисторе VT3, охваченные внешней оптической связью, создаваемой светодиодам-и VD5, VD2, образуют второй генератор прямоугольных колебаний со скважностью
T/t 1,005.ТранзисторVT1,частотнозадающая цепочка R6, R7, С1, триггер D1 усилитель тока на транзисторе VT3, охваченные внешней оптической связью, создаваемой светодиодами VD5, VD1 образуют первый
генератор прямоугольных колебаний со скважностью T/t 20 (фиг. 6).
Скважность и частота колебаний генераторов определяется постоянной времени заряда конденсатора,
Для первого генератора; время заряда Ci R x Ci; время разряда Ci Rex Ci. Для второго генератора время заряда Са (Re + Rs) x Са;
время разряда Са Rio x C2.
В каждый момент времени, в зависимости от положения пластинки, перекрывающей светодиоды VD1 и VD5 (фиг. 5), задействован только один из внешних каналов оптической связи (либо VD5 - VD1, либо VD5 - VD2) и, следовательно, работает только один из генераторов.
Скважность колебаний первого генератора более 20, что соответствует низкому
уровню выхода датчика, а скважность колебаний второго генератора менее 1,005, что соответствует высокому уровню выхода датчика, а наличие в обоих случаях колебаний свидетельствует об исправности датчика.
Использование предлагаемого датчика позволяет увеличить срок службы оборудования, предотвратить аварийные ситуации, возникающие в результате неисправности самих датчиков положения.
Форму л-а изобретения Датчик положения рабочего органа механизма, содержащий излучатель и приемник света, размещенные с возможностью оптической связи по разные стороны канала перемещения рабочего органа механизма, и предварительный усилитель, частотноза- дающая цепь и оконечный усилитель, вклю0
ценные последовательно между выходом приемника и входом излучателя, отличающийся тем, что, с целью повышения ремонтопригодности, он снабжен дополнительными последовательно соединенными приемником света, предварительным усилителем и частотнозадающей цепью,выход которой подключен к входу оконечного усилителя, при этом дополнительный приемник размещен с возможностью оптической связи с излучателем через отражающую поверхность перемещаемого рабочего органа механизма.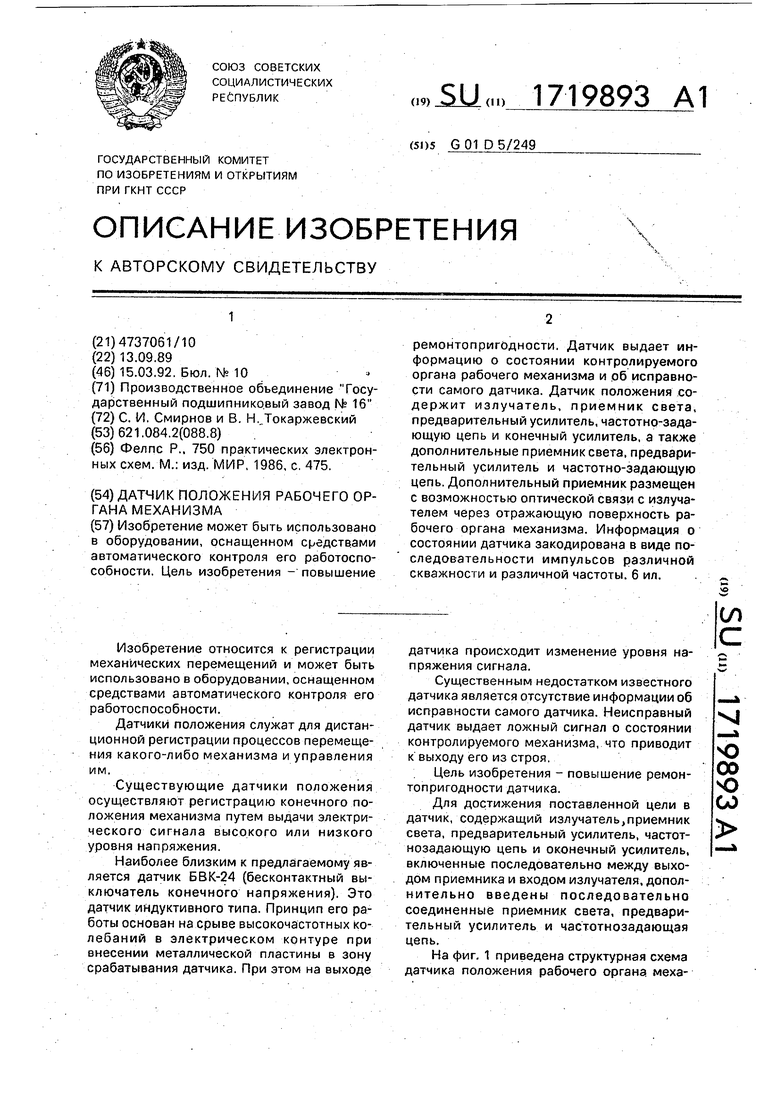

| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УЧЕТА И КОНТРОЛЯ ЭЛЕКТРОЭНЕРГИИ | 2000 |
|
RU2190859C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЛУБИНОЙ ОБРАБОТКИ ПОЧВЫ ФРОНТАЛЬНЫМ РОТАЦИОННЫМ ВНУТРИПОЧВЕННЫМ РЫХЛИТЕЛЕМ | 2009 |
|
RU2418399C2 |
| УСТРОЙСТВО САНКЦИОНИРОВАНИЯ ДОСТУПА | 2004 |
|
RU2273712C2 |
| Устройство для определения междуфазных замыканий и замыканий на землю в сетях с изолированной нейтралью напряжением 6-10 кВ | 2022 |
|
RU2788035C1 |
| УМНОЖИТЕЛЬ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА УНПТ ВОРОБЬЕВА | 2005 |
|
RU2295822C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ УПРАВЛЯЕМОЙ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО КРЕНУ, И АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243494C2 |
| РАДИОЧАСТОТНЫЙ ОБНАРУЖИТЕЛЬ МЕТАЛЛИЧЕСКИХ ТЕЛ | 2003 |
|
RU2239850C1 |
| ЭЛЕКТРОННЫЙ ХОМУС | 2012 |
|
RU2498418C2 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1997 |
|
RU2124802C1 |
| Датчик натяжения преимущественно оптического волокна | 1986 |
|
SU1430768A1 |

Изобретение может быть использовано в оборудовании, оснащенном средствами автоматического контроля его работоспособности. Цель изобретения - повышение ремонтопригодности. Датчик выдает информацию о состоянии контролируемого органа рабочего механизма и об исправности самого датчика. Датчик положения содержит излучатель, приемник света, предварительный усилитель, частотно-задающую цепь и конечный усилитель, а также дополнительные приемник света, предварительный усилитель и частотно-задающую цепь. Дополнительный приемник размещен с возможностью оптической связи с излучателем через отражающую поверхность рабочего органа механизма. Информация о состоянии датчика закодирована в виде последовательности импульсов различной скважности и различной частоты. 6 ил.
фие. 2
| Фелпс Р. | |||
| СУХОЙ ОГНЕТУШИТЕЛЬ | 1923 |
|
SU750A1 |
| М.: изд | |||
| МИР, 1986, с | |||
| Приспособление для регистрации колебаний почвы | 1922 |
|
SU475A1 |
