Изобретение относится к оборонной технике и, в частности, к комплексным средствам контроля управляемых ракет, например телеориентируемых в луче.
В настоящее время из-за высокого быстродействия и высокой степени доверия к полученным результатам контроля автоматизированные системы контроля заменяют обычную контрольно-проверочную аппаратуру ручного управления.
Известен способ контроля сбоев в системе регулирования, приведенный в описании патента GB 1532344, кл. G 05 B 23/00, 1978 (1), включающий задачу имитирующих команд, сравнение текущих величин команд управления на рулевом приводе с предварительно заданными имитирующими значениями и оценку по результатам сравнения соответствия контролируемого параметра заданному значению.
Известна автоматизированная система контроля [1], содержащая последовательно соединенные источник внешних и внутренних возмущений, объект обслуживания и блок контроля, выход которого через блок управляющих воздействий подключен ко вторым входам объекта обслуживания, при этом второй вход блока контроля соединен с выходом блока разрешенных состояний.
Эта известная система контроля предназначена для автоматизированного контроля параметров объекта обслуживания, в качестве которого может быть управляемая ракета, вращающаяся по крену, выполненная в виде последовательно включенных приемника, аппаратуры разделения каналов и декодирования и автопилота [2], который выполнен в виде последовательно соединенных устройства преобразования команд с датчиком крена и релейного рулевого привода [3]. Источник внешних возмущений при проверке ракеты можно представить как источник входного сигнала приемника, т.е. имитатор командных сообщений.
Поскольку случайный процесс x(t) описывает изменение контролируемого объекта во времени под влиянием внешних и внутренних ξ(t) возмущающих факторов, то контроль параметров объекта сводится к такому управлению случайным процессом x(t), чтобы процесс постоянно находился в области разрешенных состояний S
Следовательно, недостатком известного способа контроля и автоматизированной системы контроля является высокая сложность при их реализации, которая сказывается на точности измерения контролируемых параметров.
Задачей настоящего изобретения является создание способа контроля и системы, более простых при их реализации при высокой степени точности контроля параметров ракеты.
Поставленная задача решается за счет того, что в способе контроля параметров управляемой ракеты, вращающейся по крену, включающем задачу имитирующих команд, сравнение текущих величин команд управления на рулевом приводе с предварительно заданными имитирующими значениями, оценку по результатам сравнения соответствия контролируемого параметра заданному значению, одновременно с заданием имитирующих команд формируют имитирующий сигнал вращения ракеты по углу крена и подают его на датчик крена ракеты, при этом изменяют частоту имитирующего сигнала вращения ракеты по крену прямо пропорционально имитирующей скорости полета ракеты, в качестве имитирующих команд используют командные сообщения, которые модулируют, преобразуют в электромагнитное излучение и подают на вход приемного тракта ракеты, причем командные сообщения задают в виде функции, имитирующей изменение положения ракеты относительно точки прицеливания.
Автоматизированная система контроля параметров управляемой ракеты, вращающейся по крену и состоящей из последовательно включенных приемника, аппаратуры разделения каналов и декодирования, преобразователя команд с датчиком крена и рулевым приводом, содержащая блок контроля и имитатор командных сообщений. Новым является то, что введен имитатор сигнала вращения ракеты, а датчик крена выполнен в виде N оптронных пар светодиод-фотодиод, где N=1, ... n, первые выводы светодиодов и фотодиодов соединены с корпусом, а вторые выводы через соответствующие резисторы соединены с источником питания, при этом вторые выводы N фотодиодов соединены соответственно с N выходами имитатора сигнала вращения и N входами блока контроля, (N+1)-й вход которого подключен ко входу рулевого привода, а (N+2)-й вход - к первому выходу имитатора командных сообщений, второй выход которого связан со входом приемника.
Автоматизированная система контроля параметров управляемой ракеты, вращающейся по крену и состоящей из последовательно включенных приемника, аппаратуры разделения каналов и декодирования, преобразователя команд с датчиком крена и рулевым приводом, содержит блок контроля и имитатор командных сообщений. Новым является то, что введены имитатор сигнала вращения ракеты и согласующее устройство, а датчик крена выполнен в виде N оптронных пар светодиод-фотодиод, где N=1, ... n, первые выводы N фотодиодов и первого светодиода соединены с источником питания, а вторые выводы N фотодиодов и N-го светодиода через соответствующие резисторы соединены с корпусом, при этом второй вывод первого светодиода соединен соответственно с первым выводом второго светодиода, второй вывод второго светодиода соединен с первым выводом третьего и т.д. вплоть до первого вывода N-го светодиода, при этом первые выводы N светодиодов и второй вывод N-го светодиода подключены к соответствующим выходам согласующего устройства, N входы которого соединены соответственно с N выходами имитатора сигнала вращения и N входами блока контроля, (N+1)-й вход которого подключен к входу рулевого привода, а (N+2)-й вход - к первому выходу имитатора командных сообщений, второй выход которого связан с входом приемника.
Заявленный способ реализуется следующим образом. Формируют командные сообщения Uкс [2], имитирующие сигналы наведения ракеты на цель по курсу и тангажу, при этом изменяют величину команды в обоих каналах в виде функции Uкс=К·f(t), где К - постоянный коэффициент, например, от максимального положительно значения до минимального отрицательного по синусоидальному закону, модулируют Uкс, например, по закону временно-импульсной модуляции (ВИМ), преобразуют в электромагнитное излучение и подают на оптический вход или при дополнительной амплитудной модуляции (ВИМ-АМ) - на антенну приемного тракта. Возможны и другие виды модуляций. Одновременно формируют имитирующий сигнал вращения ракеты по крену в полете, например, с помощью преобразователя "угол-число" [4], повторяющий сигнал, формируемый датчиком крена, расположенным на ракете. Имитирующий сигнал вращения ракеты по крену подают на входные элементы датчика крена ракеты.
Изменяя частоту имитируемого сигнала вращения ракеты по крену (например, скорость вращения кодового диска в преобразователе "угол-число"), можно имитировать изменение скорости полета ракеты от минимального до максимального значений. Это следует из того, что полет ракеты, вращающейся по крену, является по сути винтовым движением [4], при этом

где υ - скорость полета (прямолинейного поступательного движения),
р - параметр винта (например, стабилизаторов ракеты, создающих вращательное движение),
ω - угловая скорость вращения ракеты по крену.
Таким образом, подавая на вход приемного тракта ракеты модулированное командное сообщение, имитирующее сигнал наведения ее на цель, а на соответствующие выводы датчика крена ракеты сигнал, который имитирует ее вращение по крену, сформируем на выходе ракеты, т.е. на обмотках рулевого привода команды управления, величины которых заданы этими имитирующими, изменяемыми во времени, сигналами. Поскольку значения имитирующих команд заранее заданы, т.е. они известны для каждого текущего момента (отрезка) времени, то заданные (например, программно изменяемые во времени) командные сообщения и реально измеренные декодированные команды управления на рулевом приводе можно сравнивать по величине, а значит, выделять разницу этих двух текущих во времени величин, а по ней делать вывод о соответствии контролируемых параметров заданным значениям.
Изменяя частоту сигнала вращения и значения командных сообщений, можно проимитировать в реальном масштабе времени весь процесс полета ракеты к цели и при этом проконтролировать сквозные параметры управляемой ракеты, например ее коэффициент передачи.
Предлагаемое изобретение поясняется чертежами (фиг.1, 2, 3 и 4).
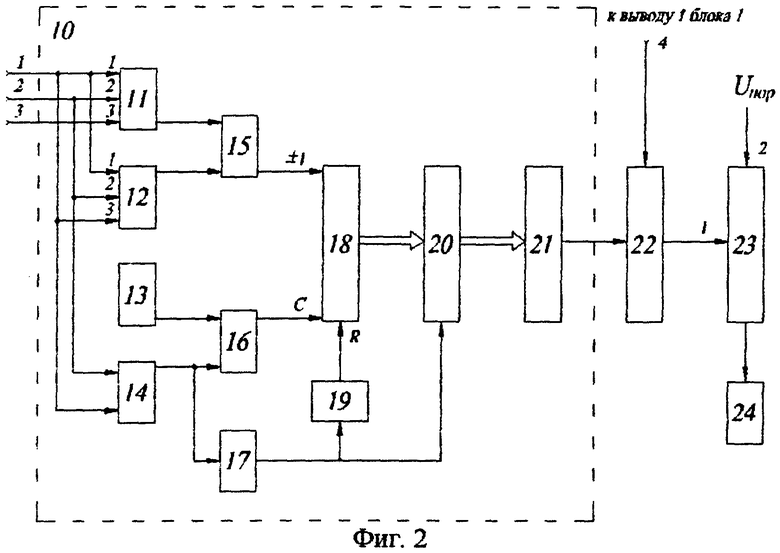
На фиг.1 приведена структурная электрическая схема автоматизированной системы контроля параметров управляемой ракеты (первый вариант) при N=2, где 1 - имитатор командных сообщений, 2 - ракета, 3 - приемник, 4 - имитатор сигнала вращения, 5 - датчик крена (две оптронные пары светодиод-фотодиод, разделенные кодирующим диском), 6 - аппаратура разделения каналов и декодирования, 7 - преобразователь команд, 8 - блок контроля, 9 - рулевой привод.
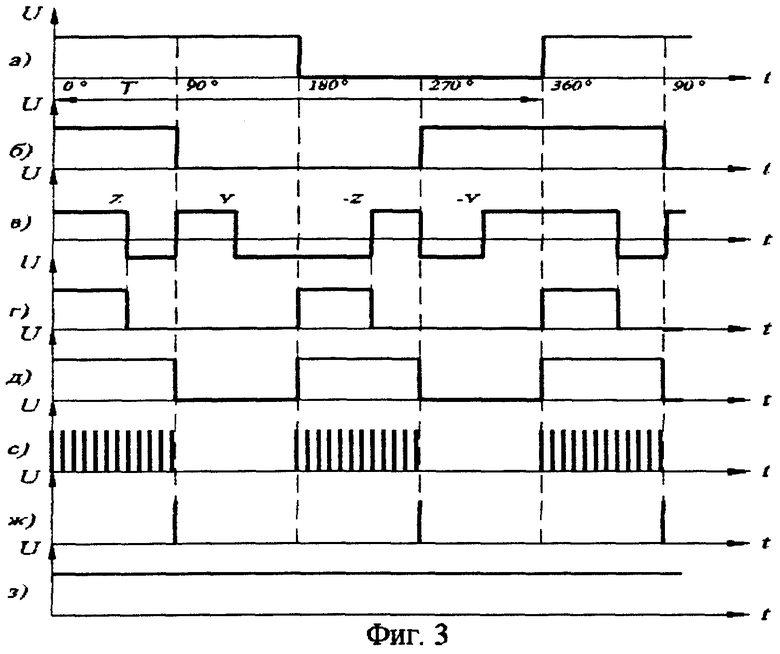
На фиг.2 приведена структурная электрическая схема блока контроля 8 (пример выполнения одного канала при N=2), где 10 - декодер, 11 - логическая схема “3 И”, 12 - логическая схема “3 ИЛИ-НЕ”, 13 - кварцованный автогенератор импульсов, 14 - логическая схема “исключающее ИЛИ” с инвертированием, 15 - логическая схема “2 И”, 16 - логическая схема “2 ИЛИ”, 17 - формирователь импульсов, 18 - реверсивный счетчик, 19 - задержка, 20 - регистр, 21 - цифроаналоговый преобразователь (ЦАП), 22 - сумматор, 23 - компаратор, 24 - индикатор, Uпop - пороговое напряжение.
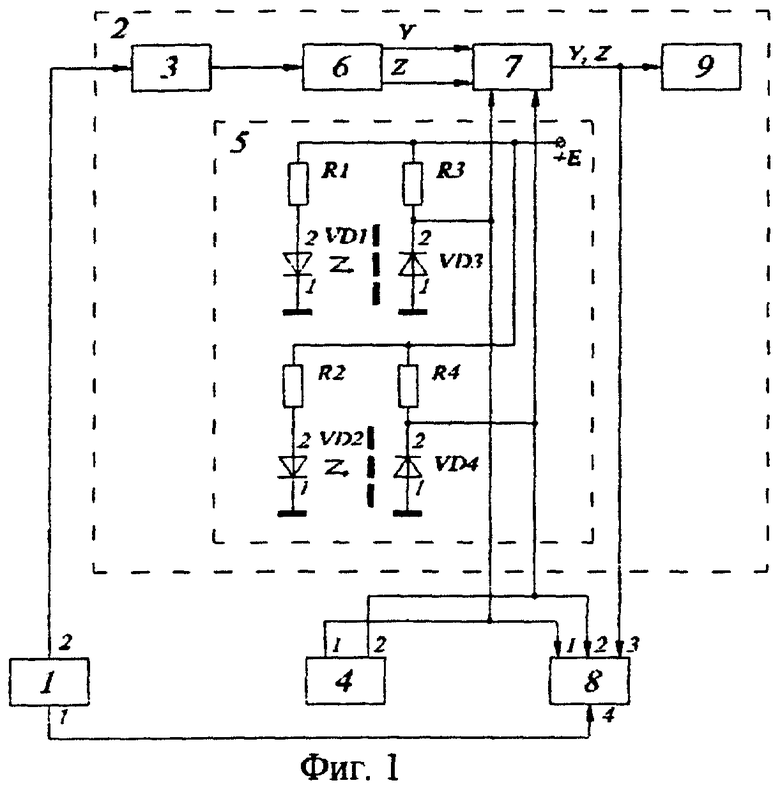
На фиг.3 приведены эпюры сигналов при N=2, а и б - соответственно на первом и втором выходах имитатора сигнала вращения 4, в - на выходе рулевого привода 9, г - на выходе логической схемы “2 И” 15, д - на выходе логической схемы “исключающее ИЛИ” 14, е - на счетном входе реверсивного счетчика 18, ж - на выходе формирователя импульсов 17, з - на выходе ЦАПа 21.
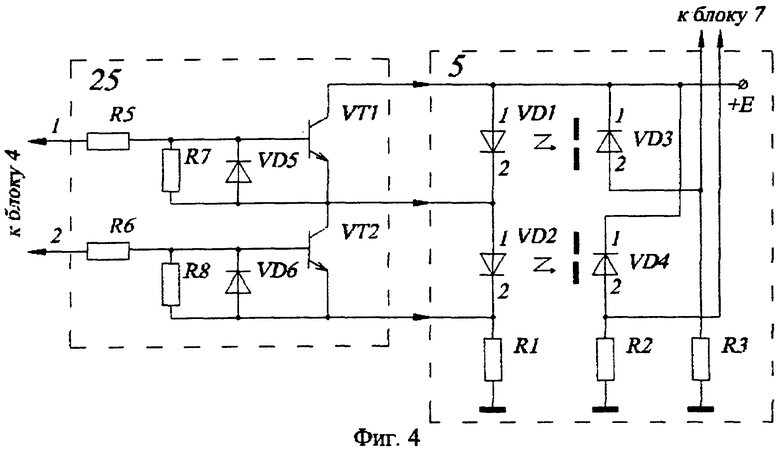
На фиг.4 приведена структурная электрическая схема (с примером реализации ее блоков для второго варианта) и электрические связи ее с основной схемой (фиг.1) при N=2, где 25 - согласующее устройство, R5 и R6 - токоограничивающие резисторы, R7 и R8 - базовые резисторы, VD5 и VD6 - защитные диоды, VT1 и VT2 - транзисторы, работающие в ключевом режиме.
Первый вариант заявленного устройства. На ракете 2 последовательно включены приемник 3, аппаратура разделения каналов и декодирования 6, преобразователь команд 7 с датчиком крена 5 и рулевой привод 9. Первые выводы светодиодов VD1, VD2 и фотодиодов VD3, VD4 из N=2 оптронных пар соединены с корпусом, а их вторые выводы через соответствующие резисторы (R1, R2 и R3, R4) соединены с источником питания Е, при этом вторые выводы N=2 фотодиодов VD3 и VD4 соединены соответственно с N=2 выходами имитатора сигнала вращения и N=2 входами блока контроля 8, (N+1)=3-й вход которого подключен к входу рулевого привода, (N+2)=4-й вход - к первому выходу имитатора командных сообщений 1, второй выход которого связан со входом приемника 3.
Второй вариант заявленного устройства. На ракете 2 последовательно включены приемник 3, аппаратура разделения каналов и декодирования 6, преобразователь команд 7 с датчиком крена 5 и рулевой привод 9. Первые выводы N=2 фотодиодов VD3, VD4 и первого светодиода VD1 соединены с источником питания Е, а вторые выводы N=2 фотодиодов VD3, VD4 и N-го (второго) светодиода VD2 через соответствующие резисторы (R2, R3 и R1) соединены с корпусом. Второй вывод первого светодиода VD1 соединен соответственно с первым выводом второго (N=2) светодиода VD2. Первые выводы N=2 светодиодов VD1, VD2 и второй вывод N=2 (второго) светодиода VD2 подключены к соответствующим выходам согласующего устройства 25, N=2 входа которого соединены соответственно с N=2 выходами имитатора сигнала вращения 4 и N=2 входами блока контроля 8, (N+1)=3-й вход которого подключен к входу рулевого привода 9, а (N+2)=4-й вход - к первому выходу имитатора командных сообщений 1, второй выход которого связан со входом приемника 3.
Имитатор командных сообщений 1 можно выполнить, например, как аппаратуру кодирования и уплотнения каналов, в которой Uкс1=Uкс2=Uкс изменяются, например, по синусоидальному закону [2] с последующей модуляцией ВИМ и модулятором AM либо без него.
Приемник 3, аппаратура разделения каналов и декодирования 6, преобразователь команд 7 с датчиком крена 5 могут быть выполнены как в [2]. При этом приемник 3 и аппаратура 6 представляют собой приемный тракт радиолинии с время-импульсной модуляцией поднесущего колебания и амплитудной модуляцией несущего (ВИМ-АМ).
Можно выполнить приемник 3 иначе, например без AM для оптического приемного тракта, при этом он может представлять собой фотодиод с резисторной нагрузкой, подключенный к усилителю сигнала, охваченному АРУ. Преобразователь команд 7 с датчиком крена 5 - по сути известная схема автопилота с позиционным гироскопом [2, 3]. Отличие состоит лишь в том, что ось внешней рамки позиционного гироскопа соединена не с токосъемником Д потенциометра, а с центром кодирующего диска [4], при этом в качестве источника света и фотодетекторов использованы N оптронные пары, например четыре или две, как в примере, приведенном на фиг.1 в заявленном устройстве. Рулевой привод 9 может быть выполнен в виде двух обмоток релейного механизма, который поочередно притягивает якорь, связанный с одной парой рулей [3].
Имитатор сигнала вращения 4 для N=2 в отличие от преобразователя "угол-число" [4] может быть выполнен и иначе, например как автогенератор импульсов (со скважностью два), к выходу которого подключены два делителя частоты (на два), срабатываемые соответственно по переднему и заднему фронтам входного сигнала, например соответственно входы “С” и “V” микросхемы 564ИЕ10. Пример выполнения блока контроля 8 приведен на фиг.2, где логические схемы “3 И” 11, “3 ИЛИ-НЕ” 12, “исключающее ИЛИ” с инвертированием 14, “2 И” 15, “2 ИЛИ” 16 и регистр - обычные микросхемы, например 564-й серии. Кварцованный автогенератор импульсов 13 - стабилизированный по частоте автогенератор. Формирователь импульсов 17, например, дифференцирующая RC-цепочка. Реверсивный счетчик 18, например, микросхема 564ИЕ11. Задержка 19, например, интегрирующая RC-цепочка. ЦАП 21 известен, например [4]. Сумматор 22 и компаратор 23 могут быть выполнены на операционном усилителе. Индикатор 24, например, светодиод. Uпop, например, стабилизированный источник напряжения.
Заявленная автоматизированная система контроля параметров управляемой ракеты, вращающейся по крену, работает следующим образом. В исходном состоянии кодирующий диск в датчике крена 5 на ракете 2 выставлен так, чтобы светодиоды VD1 и VD2 не засвечивали (при подаче напряжения на ракету, а значит, и на оптронную пару датчика 5 от внешнего источника Е) фотодиоды VD3 и VD4.
С выхода имитатора командных сообщений 1, например, через световод подают электромагнитное импульсное излучение на оптический вход приемника 3, который преобразует это излучение в электрический импульсный сигнал и усиливает его. С выхода приемника 3 сигнал поступает на аппаратуру разделения каналов и декодирования 6, где этот сигнал разделяется по тангажу “Y” и курсу “Z” и декодируется, т.е. ВИМ преобразуется в величину команды соответственно по “Y” и “Z”.
Имитатор сигнала вращения 4, например два его выходных электронных ключа, подключенных к катодам фотодиодов VD3 и VD4, замыкая их на корпус, формируют электрический сигнал, приведенный на эпюрах а и б фиг.3, который поступает на преобразователь команд 7. В течение 0...90° на выход преобразователя команд 7 поступает команда по курсу “+Z”, 90...180° поступает команда по тангажу “+Y”, 180...270° - команда “-Z”, а в течение 270...360° - команда “-Y”.
Таким образом, преобразователь команд 7 преобразует команды из неподвижных координат пункта управления (которые имитируют имитатор командных сообщений 1) в систему координат ракеты, вращающуюся по крену, которую имитирует имитатор сигнала вращения 4, при этом частота сигнала вращения (длительность периода повторения сигналов Т на эпюре а и б фиг.3) определяет угловую скорость вращения ракеты по крену, а значит, и ее скорость полета, что отмечалось ранее.
Релейный сигнал с выхода преобразователя команд 7 (эпюра в на фиг.3) поочередно по курсу “Z” и тангажу “Y” в каждую четверть кренового периода Т соответственно со своим знаком (инвертированная команда либо нет) поступает на рулевой привод 9, который в полете отрабатывал бы эти команды.
Как отмечалось выше, блок контроля 8 можно представить в виде двух идентичных устройств по курсу “Z” и тангажу “Y”, поэтому далее рассматривается работа только по курсу “Z”.
Сигналы с первого и второго выходов имитатора сигнала вращения 4 (эпюры а и б фиг.3) поступают соответственно на первый и второй входы блока контроля 8, т.е. на первый и второй входы логической схемы “3 И” 11 в демодуляторе 10. На третий вход логической схемы “3 И” 11 поступает сигнал со входа рулевого привода (эпюра в на фиг.3) На выходе логической схемы “3 И” 11 формируется сигнал в течение 0...180°, приведенный на эпюре г (фиг.3).
Сигналы, поступающие на первый, второй и третий входы логической схемы “3 И” 11, поступают также на первый, второй и третий входы логической схемы “3 ИЛИ-НЕ” 12, на выходе которой в течение 180...360° формируется сигнал, приведенный на фиг.3 (эпюра г). Логическая схема “2 И” 15 объединяет эти два сигнала в течение периода Т в один (эпюра г на фиг.3).
Сигналы с первого и второго выходов имитатора сигнала вращения 4 (эпюры а и б на фиг.3) поступают также на логическую схему “исключающее ИЛИ” 14, на инверсном выходе которой формируется сигнал, приведенный на эпюре д фиг.3. Сигналы с выхода схемы 14 и автогенератора (со стабилизированной частотой импульсов) 13 поступают на логическую схему “2 И” 16, на выходе которой формируются пачки импульсов длительностью 1/4 Т (эпюра е на фиг.3).
Формирователь импульсов 17 формирует из сигнала с выхода схемы 14 (эпюра д на фиг.3) импульсы (эпюра ж на фиг.3), которые поступают через задержку 19 на вход обнуления "R" реверсивного счетчика 18 и выставляют его выходы (разряды двоичного числа) в нулевое логическое состояние.
Сигнал, поступающий с выхода схемы 15 (эпюра г на фиг.3) на вход переключения направления счета (вход "±1") реверсивного счетчика 18, задает режим счета суммирование (увеличение двоичного числа) либо вычитание (уменьшение двоичного числа) для импульсов, поступающих на счетный вход "С" реверсивного счетчика 18 с выхода схемы 16.
Таким образом, на выходе реверсивного счетчика 18 сформируются по окончании каждой четверти, соответствующей командам “Z” и “-Z”, двоичные числа, величины которых равны разности длительностей положительного и отрицательного значений команд. Каждое значение величины команды записывается (переписывается) из счетчика 18 в регистр 20 импульсом с выхода формирователя 17 (эпюра ж на фиг.3), который затем обнуляет через задержку 19 счетчик 18, после чего процесс повторяется вновь.
С выхода регистра 20 двоичное число поступает на входы ЦАПа 21, где оно превращается в аналоговый сигнал (эпюра з на фиг.3), который складывается в сумматоре 22 в противофазе с командным сообщением Uкc, со второго выхода имитатора командных сообщений 1 (эпюра з на фиг.3). При этом формируется сигнал ошибки, величина которой прямо пропорциональна амплитуде этого (разностного) сигнала.
Сигнал ошибки с выхода сумматора 22 поступает на первый вход компаратора 23, где он сравнивается с величиной допуска, т.е. величиной порогового напряжения Uпop. В случае, если сигнал ошибки превышает величину Uпop, компаратор 23 изменяет скачком знак напряжения на своем выходе и индикатор 24 регистрирует ошибку, говорящую о выходе параметра за пределы допуска.
Как следует из изложенного выше, аналогичным образом можно проконтролировать и канал тангажа “Y”, например поочередно (простейший случай) либо одновременно, для чего требуется одновременно снимать две команды Uкс1 (по курсу) и Uкс2 (по тангажу), например со второго и третьего (на фиг.1 не приведен) выходов имитатора командных сообщений 1 и подавать соответственно на четвертый и пятый (на фиг.1 не приведен) входы блока контроля 8.
Аналогичным образом функционирует и второй вариант системы автоматического контроля, с той лишь разницей, что схема выполнения блока 5 (фиг.4) отлична от предыдущей, приведенной на фиг.1, и фотодиоды VD3 и VD4 на фиг.4 в исходном состоянии засвечены. Поэтому светодиоды VD1 и VD2 коммутируют путем их закорачивания транзисторными ключами VT1 и VT2, расположенными в согласующем устройстве 25, входы которого аналогично подключены к имитатору сигнала вращения.
Как следует из изложенного выше, в заявленной автоматизированной системе контроля ракеты, вращающейся по крену (два варианта), осуществляют контроль текущих во времени параметров ракеты с имитацией в реальном масштабе времени скорости полета и места нахождения ракеты в поле управления, т.е. производится сквозной контроль электрических параметров ракеты (на входе рулевого привода, например на его обмотках управления), при этом на ракету 2 и блок контроля 8 поступают
а) одинаковые сигналы с имитатора вращения 4;
б) значения командных сообщений с имитатора 1 для ракеты 2 временно-импульсно модулированы, а для блока контроля 8 немодулированы;
в) сигнал с выхода ракеты 2 (со входа рулевого привода 9) поступает только на блок контроля 8, где он декодируется и сравнивается с заданными (Uкс1 и Uкс2), т.е. с сигналами со второго выхода блока 1.
Следовательно, точность контроля, определяемая практически точностью временно-импульсной модуляции в имитаторе командных сообщений и точностью декодирования в блоке контроля, которые определяются при цифровой реализации разрядностью двоичного числа, можно выполнить очень высокой при достаточно простой реализации.
Таким образом, в способе контроля параметров управляемой ракеты, вращающейся по крену, за счет того что одновременно с заданием имитирующих значений командных сообщений формируют имитирующий сигнал вращения ракеты по углу крена и подают его на датчик крена ракеты, сравнивают текущие величины команд управления на рулевом приводе ракеты с предварительно заданными имитирующими значениями и по результатам сравнения делают вывод о соответствии контролируемых параметров заданным, при этом меняют частоту имитирующего сигнала вращения ракеты по крену прямо пропорционально имитирующей скорости полета ракеты, а значение командных сообщений задают в виде функции, имитирующей изменение положения ракеты относительно точки прицеливания, упрощена его реализация при высокой степени точности контроля параметров ракеты.
Введение в автоматизированную систему контроля параметров управляемой ракеты, вращающейся по крену, имитатора сигнала вращения и выполнение датчика крена в виде N оптронных пар позволило просто реализовать данное устройство (в двух вариантах), обладающее малыми габаритно-массовыми и стоимостными характеристиками, при высокой степени точности контроля параметров ракеты.
Источники информации
1. В.Д. Кудрицкий, М.А. Синица, П.И. Чинаев. Автоматизация контроля радиоэлектронной аппаратуры, М.: Советское радио, 1977 г., стр. 5-7, рис. 1.1.
2. В.А. Вейцель, В.Н. Типугин. Основы радиоуправления, М.: Советское радио, 1973 г., стр. 41-44, 49-52, рис. 1.27, 1.29; 237-239, 246-248, рис. 4.28.
3. В.А. Павлов, С.А. Понырко, Ю.М. Хованский. Стабилизация летательных аппаратов и автопилоты, М.: Высшая школа, 1964 г., стр.115, 208, 209, рис. 6.11.
4. В.П. Демидов, Н.Ш. Кутыев. Управление зенитными ракетами, М.: Военное издательство, 1989 г., стр. 283-287, рис. 10.3, 10.4; стр. 291-293.
5. Физический энциклопедический словарь, гл. редактор А.М. Прохоров, М.: Сов. энциклопедия, 1984 г., стр. 77.
Изобретение относится к оборонной технике и, в частности, к комплексным средствам контроля управляемых ракет. Технический результат - повышение точности измерения параметров. Согласно изобретению задают имитирующие значения командных сообщений, модулируют и преобразуют их в электромагнитное излучение, которое подают на вход приемного тракта ракеты и осуществляют контроль параметров ракеты. Одновременно с заданием имитирующих значений командных сообщений формируют имитирующий сигнал вращения ракеты по углу крена и подают его на датчик крена ракеты. Сравнивают текущие величины команд управления на рулевом приводе ракеты с предварительно заданными имитирующими значениями и по результатам сравнения делают вывод о соответствии контролируемых параметров заданным, при этом меняют частоту имитирующего сигнала вращения ракеты по крену прямо пропорционально имитирующей скорости полета ракеты, а сигнал наведения ракеты дополнительно модулируют сигналом, имитирующим изменение положения ракеты относительно точки прицеливания, в котором упрощена реализация при высокой степени точности контроля параметров ракеты. Описаны два варианта автоматизированной системы контроля параметров управляемой ракеты, вращающейся по крену. 3 н.п. ф-лы, 4 ил.
| Система управления фрикционными гидромуфтами двухпоточной коробки передач транспортного средства | 1988 |
|
SU1532344A1 |
| СПОСОБ ГИБРИДНОЙ ЛАЗЕРНО-ДУГОВОЙ СВАРКИ ДЕТАЛЕЙ ИЗ АЛИТИРОВАННОЙ СТАЛИ С ПРОВОЛОКОЙ, СОДЕРЖАЩЕЙ ОБРАЗУЮЩИЕ ГАММУ-ФАЗУ ЭЛЕМЕНТЫ, И ГАЗОМ, СОДЕРЖАЩИМ МЕНЕЕ 10% АЗОТА ИЛИ КИСЛОРОДА | 2011 |
|
RU2588978C2 |
| DE 3310403 A1, 20.09.1984 | |||
| FR 2064386 А, 23.07.1971. | |||

