Фм.1
Изобретение относится к медицине, в частности к неврологии, и предназначено для консервативного лечения неврологически проявлений остеохондроза позвоночника.
Известно устройство для коррекции позвоночника, содержащее реклинатор, а также тазовый тл плечевой пояса, соединенные между собой стойкой. Тазовый пояс снабжен подпружиненной опорной планкой с винтовым нагрузочным механизмом, реклинатор выполнен в виде ряда шарнирно соединенных сегментов, крайние из которых соединены с плечевым поясом и опорной планкой. Стойка выполнена резьбовой, закреплена с возможностью перемещения на одном из крайних сегментов и соединена с опорной планкой посредством пружины.
Однако в указанном устройстве соеди- нение элементов крепления на теле, выполненных в виде тазового и плечевого поясов (т.е. конструкция нагрузочного механизма) не позволяет совершать ротационные движения в позвоночнике, в связи с чем невозможно проведение лечебных манипуляций, сочетающих ротацию с тракцией.
Известно также устройство для вытяжения позвоночника, состоящее из элементов крепления на теле, выполненных в виде нагрудного и набедренного поясов. Между поясами расположены предназначенные для создания тракционного усилия нагрузочные механизмы, каждый из которых лредставля- ет собой телескопически раздвижной корпус с расположенной внутри тарированной пружиной. Внутри корпуса установлен плунжер-толкатель с фиксатором, который взаимодействует с фигурным пазом корпуса. На элементах крепления выполнены направляющие, в которых с возможностью перемещения и фиксации с. помощью съемных замков установлены концы корпусов нагрузочных механизмов. Устройство предназначено для создания статического, т.е. постоянного во времени и по направлению, усилия вытяжения.
Однако в связи со статичностью известное устройство не может быть использовано для динамического воздействия на позвоночник. В частности, жестконепод- вижная фиксация концов нагрузочных меха- низмов не позволяет осуществлять динамическое ротацконно-тракционное воздействие на позвоночник, сочетающее нарастание амплитуды ротации с увеличением трзкционного усилия.
Кроме того, устройство характеризуется невозможностью плавной регулировки усилия вытяжения. Ступенчатое скачкообразное изменение тракционного усилия пу
тем перемещения и фиксации плунжера- толкателя в фигурных пазйх ограничивает возможности регулировки. При этом приходится пользоваться ограниченным набором
ступенчато меняющихся дискретных значений силы вытяжения, различных при использовании устройства для лечения людей разного телосложения и зависящих от роста (длины туловища) больного. Устройство так0 же не оборудовано приспособлением для измерения и контроля усилия вытяжения.
Цель изобретения - повышение эффективности восстановления подвижности патологически измененных мышц, и суставов
5 позвоночника путем приложения к нему динамического ротационно-тракционного воздействия.
Сущность изобретения заключается в следующем. Между элементами крепления
0 на теле, выполненными в виде тазового м грудного поясов, установлены нагрузочные механизмы. Каждый из нагрузочных механизмов представляет собой телескопическую штангу с размещенной ,в ней
5 тарированной пружиной сжатия. В устройстве предусмотрена возможность перестановки концов телескопических штанг вдоль поясов. Концы телескопических штанг, установленных наклонно и взаимно парадлель0 но, соединены с тазовым и грудным поясами шарнирно с возможностью вращения в плоскости, параллельной поверхности туловища больного, что обеспечивает восстановление объема движений пат ологиче5 ски измененных мышц и суставов позвоночника путем приложения к нему динамического ротационно-тракционного воздействия, Выполнение ротационного движения в позвоночнике вызывает взаим0 нов вращение зафиксированных на больном тазового и грудного поясов, при этом телескопические штанги, соединенные с поясами шарнирно, изменяют ориентацию и переходят из наклонного в перпендикуляр5 ное по отношению к поясам положение. В результате такой переориентации телескопических штанг возникает тракционноеусилие, характеризующееся плавным нарастанием о нуля до максимального зна0 чения по мере перехода штанг из наклонного в перпендикулярное положение. Таким образом, увеличение угла ротации вызывает одновременное и пропорциональное увеличение тракционного усилия. Указанный ха5 рактер взаимосвязи является наиболее оптимальным, так как предусматривает взаимное обеспечение дополняющих друг друга воздействий: увеличение угла ротации вызывает нарастание тра кциошюго усилия, которое, в свою очередь, обеспечивает возмояоность дальнейшего безболезненного увеличения амплитуды ротации за счет декомпрессии нервных и сосудистых образований, растяжения патологически укороченных пзравертебраг-ьных мышц и деблокирования межпозвоночных суставов в результате увеличения расстояния между суставными поверхностями,
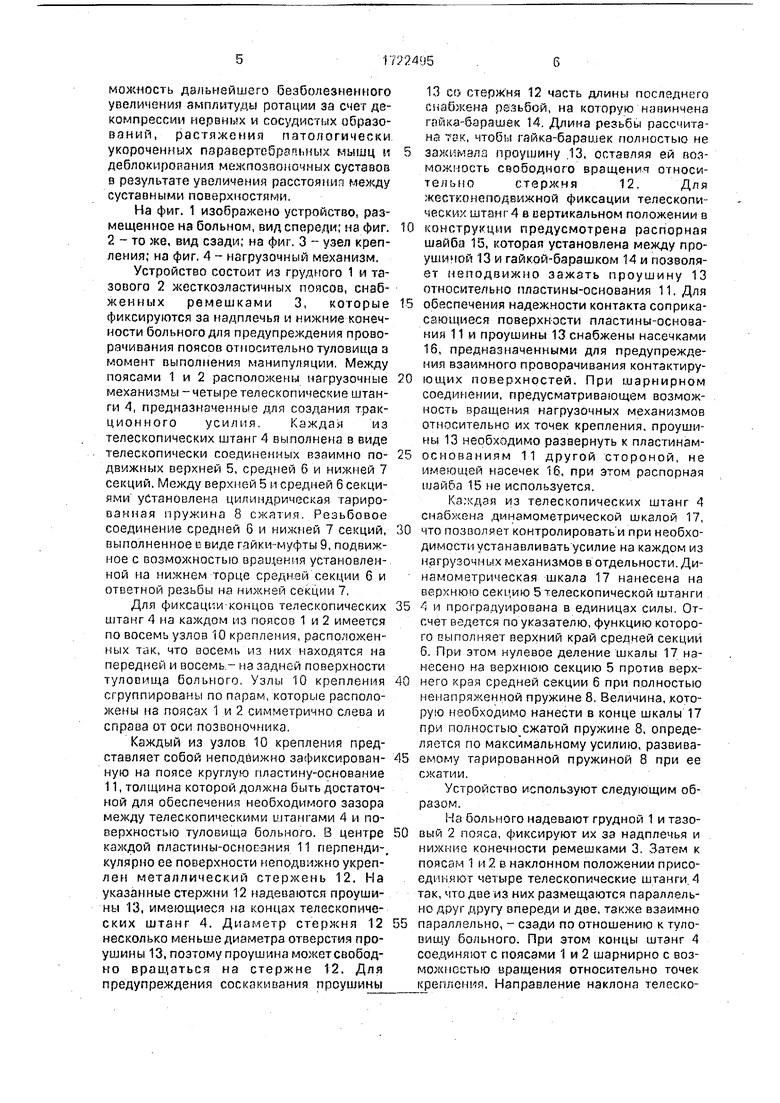
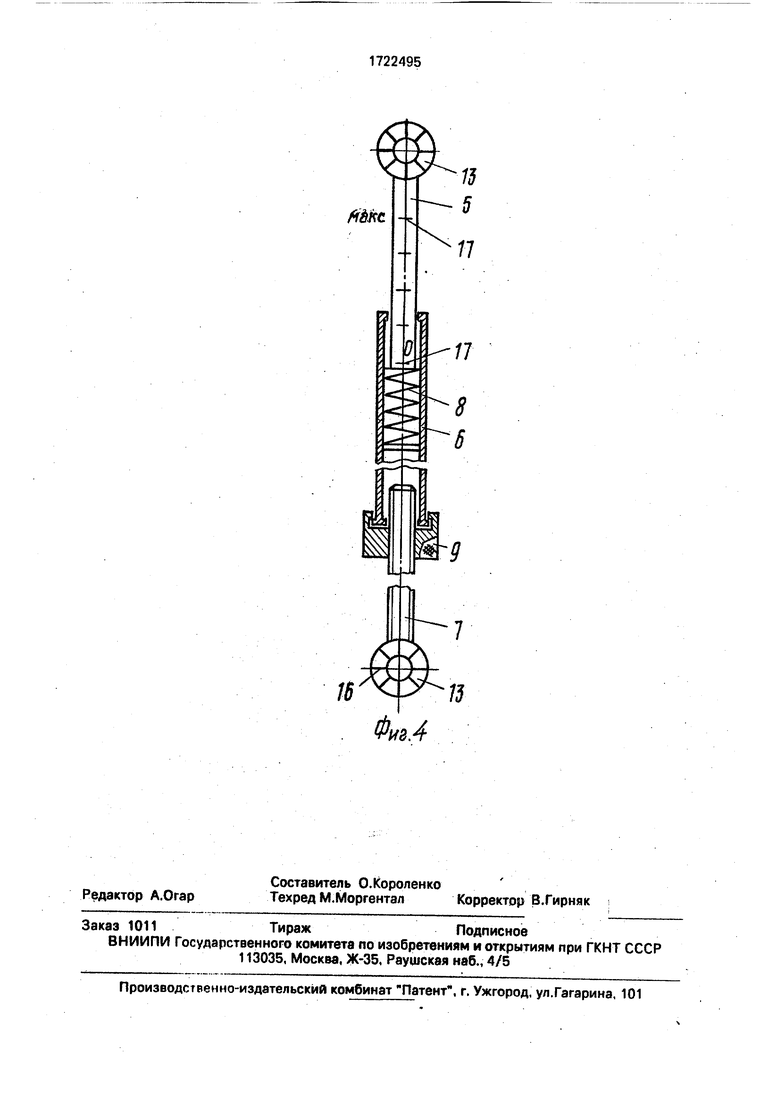
На фиг. 1 изображено устройство, размещенное на больном, вид спереди; на фиг. 2 - то же, вид сзади; на фиг. 3 - узел крепления; на фиг. 4 - нагрузочный механизм.
Устройство состоит из грудного 1 и тазового 2 жесткоэластичных поясов, снабженных ремешками 3, которые фиксируются за надплечьп и нижние конечности больного для предупреждения проворачивания поясов относительно туловища а момент выполнения манипуляции. Между поясами 1 и 2 расположены нагрузочные механизмы-четыре телескопические штанги 4, предназначенные для создания трак- ционного усилия. Каждая из телескопических штанг 4 выполнена в виде телескопически соединенных взаимно по- движных верхней 5, средней б и нижней 7 секций. Между верхней 5 и средней 6 секциями установлена цилиндрическая тарированная пружина 8 сжатия. Резьбовое соединение средней 6 и нижней 7 секций, выполненное к виде гзйки-муфты 9, подвижное с возмох ностыо вращения установленной на нижнем торце средней секции 6 и ответной резьбы на нижней секции 7.
Для фиксаций-концов телескопических штанг 4 на каждом из поясов 1 и 2 имеется по восемь узлов 10 крепления, расположенных так, что восемь из них находятся на передней и восемь.- на задней поверхности туловища больного. Узлы 10 крепления сгруппированы по парам, которые расположены на поясах 1 и 2 симметрично слева и справа от оси позвоночника.
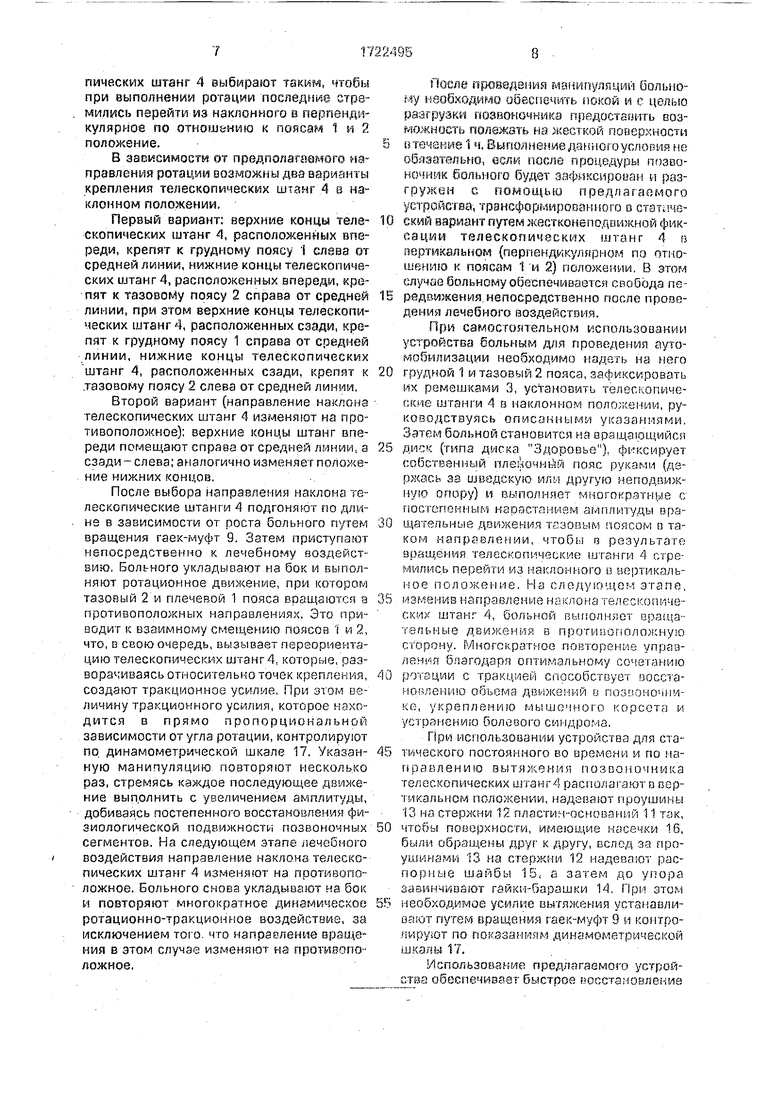
Каждый из узлов 10 крепления представляет собой неподвижно зафиксирован- ную на поясе круглую пластину-основание 11, толщина которой должна быть достаточной для обеспечения необходимого зазора между телескопическими штангами 4 и поверхностью туловища больного. В центре каждой пластины-осног-ания 11 перпендикулярно ее поверхности неподвижно укреплен металлический стержень 12. На указанные стержни 12 надеваются проушины 13, имеющиеся на концах телескопических штанг 4. Диаметр стержня 12 несколько меньше диаметра отверстия проушины 13, поэтому проушина может свободно враа(аться на стержне 12. Для предупреждения соскакивания проушины
13 со стерж ня 12 часть длины последнего снабжена резьбой, на которую навинчена гайка-барашек 14. Длина резьбы рассчитана так, чтобы гайка-барашек полностью не зажимала проушину .13, оставляя ей возможность свободного вращения относительностержня12.Для жестконеподвижной фиксации телескопических штанг 4 в вертикальном положении в конструкции предусмотрена распорная шайба 15, которая установлена между проушиной 13 и гайкой-барашком 14 и позволяет неподвижно зажать проушину 13 относительно пластины-основания 11. Для обеспечения надежности контакта соприкасающиеся поверхности пластины-основания 11 и проушины 13 снабжены насечками 16, предназначенными для предупреждения взаимного проворачивания контактирующих поверхностей. При шарнирном соединении, предусматривающем возможность вращения нагрузочных механизмов относительно их точек крепления, проушины 13 необходимо развернуть к пластинам- основаниям 11 другой стороной, не имеющей насечек 16, при этом распорная шайба 15 не используется.
Каждая из телескопических штанг 4 снабжена динамометрической шкалой 17, что позволяет контролировать и при необходимости устанавливать усилие на каждом из нагрузочных механизмов в отдельности. Динамометрическая шкала 17 нанесена на верхнюю секцию 5 телескопической штанги 4 и проградуирована в единицах силы. Отсчет ведется поуказателю, функцию которого выполняет верхний край средней секций 6. При этом нулевое деление шкалы 17 нанесено на верхнюю секцию 5 против верхнего края средней секции 6 при полностью ненапряженной пружине 8. Величина, .которую необходимо нанести в конце шкалы 17 при полностью сжатой пружине 8, определяется по максимальному усилию, развиваемому тарированной пружиной 8 при ее сжатии.
Устройство используют следующим образом.
Нз больного надевают грудной 1 и тазовый 2 пояса, фиксируют их за надплечья и нижние конечности ремешками 3, Затем к поясам 1 и 2 в наклонном положении присоединяют четыре телескопические штанги. 4 так, что две из них размещаются параллельно друг другу впереди и две. также взаимно параллельно, - сзади по отношению к туловищу больного. При этом концы штанг 4 соединяют с поясами 1 и 2 шарнирно с возможностью вращения относительно точек крепления. Направление наклона телескопических штанг 4 выбирают таким, чтобы при выполнение ротации последние стремились перейти из наклонного в перпендикулярное по отношению к поясам 1 и 2 положение.
В зависимости от предполагаемого направления ротации возможны два варианты крепления телескопических штанг 4 в наклонном положении.
Первый вариант: верхние концы телескопических штанг 4, расположенных впереди, крепят к грудному поясу 1 слева от средней линии, нижние концы телескопических штанг 4, расположенных впереди, крепят к тазовому поясу 2 справа от средней линии, при этом верхние концы телескопических штанг 4, расположенных сзади, крепят к грудному поясу 1 справа от средней линии, нижние концы телескопических штанг 4, расположенных сзади, крепят к тазовому поясу 2 слева от средней линии.
Второй вариант (направление наклона телескопических штанг 4 изменяют на противоположное): верхние концы штанг впереди помещают справа от средней линии, а сзади - слева; аналогично изменяет положение нижних концов,
После выбора направления наклона телескопические штанги 4 подгоняют по длине в зависимости от роста больного путем вращения гаек-муфт 9. Затем приступают непосредственно к лечебному воздействию, Больного укладывают на бок и выполняют ротационное движение, при котором тазовый 2 и плечевой 1 пояса вращаются а противоположных направлениях. Это приводит к взаимному смещению поясов 1 и 2, что, в свою очередь, вызывает переориентацию телескопических штанг 4,которые,разворачиваясь относительно точек крепления, создают тракциоиное усилие, При этом величину тракционного усилия, которое находится в прямо пропорциональной зависимости от угла ротации, контролируют по динамометрической шкале 17. Указанную манипуляцию повторяют несколько раз, стремясь каждое последующее движение выполнить с увеличением амплитуды, добиваясь постепенного восстановления физиологической подвижности позвоночных сегментов. На следующем этапе лечебного воздействия направление накло.на телескопических штанг 4 изменяют на противоположное. Больного снова укладывают на бок и повторяют многократное динамическое ротационно-тракцио-н ное воздействие, за исключением того, что направление вращения в этом случае изменяют на противоположное.
После проведения манипуляций больному необходимо обеспечить покой и с целью разгрузки позвоночника предоставить возможность полежать на жесткой поверхности
в течение 1 ч. Выполнение данного условия не обязательно, если после процедуры позвоночник больного будет зафиксирован и разгружен с помощью предлагаемого устройства, трансформированного в статаческий вариант путем жестконеподвижной фикса ци и телескопических штанг 4 в вертикальном (перпендикулярном по отношению к поясам 1 и 2) положении, В этом случае больному обеспечивается свобода передвижения.непосредственно после проведения лечебного воздействия.
При самостоятельном использовании устройства больным для проведения ауто- мобилизации необходимо надеть на него
грудной 1 и тазовый 2 пояса, зафиксировать их ремешками 3, установить телескопические штанги 4 в наклонном положении, руководствуясь описанными указаниями, Затем больной становится на вращающийся
диск (типа диска Здоровье), фиксирует собственный плефочнйй пояс руками (держась за шведскую или другую неподвижную опору) и выполняет многократные с постепенным нарастанием амплитуды вращательные движения тазовым поясом в таком направлении, чтобы в результате вращения телескопические штанги 4 стремились перейти из наклонного в вертикальное положение. На следующем этапе,
изменив направление наклона телескопических штанг 4, больной выполняет орзща- тепьные движения в противоположную сторону. Многократное повторение управления благодаря оптимальному сочетанию
ротации с тракцией способствует восстановлению объема движений в позвоночнике, укреплению мышечного корсета и устранению болевого синдрома.
При использовании устройства для статического постоянного во времени и по иа- г I р а в л е н и ю в ы т я ж е н м я п о з о о н о ч н и на телескопических штанг 4 располагают о вертикальном положении, надевают проушины 13 на стержни 12 пластин-оснований 11 так,
чтобы поверхности, имеющие насечки 16, были обращены друг к другу, вслед за проушинами
ij
на стержни 12 надевают распорные шайбы 15 а затем до упора завинчивают гайки-барашки 14, При этом необходимое, усилие вытяжения устанавливают путем вращения гаек-муфт 9 и контролируют по показаниям динамометрической шкалы 17.
Использование предлагаемого устройства обеспечивает быстрое восстановление
О
11
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА КОРРЕКЦИИ ПОЗВОНОЧНИКА | 2008 |
|
RU2380075C1 |
| Устройство для вытяжения позвоночника | 1990 |
|
SU1773404A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2003 |
|
RU2257880C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ И РАЗГРУЗКИ ПОЗВОНОЧНИКА | 2012 |
|
RU2488368C1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ПОЗВОНОЧНИКА | 1999 |
|
RU2155017C1 |
| УСТРОЙСТВО ДЛЯ ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА И СУСТАВОВ НИЖНИХ КОНЕЧНОСТЕЙ | 1993 |
|
RU2056816C1 |
| Устройство И.И.Хижко для вытяжения позвоночника | 1986 |
|
SU1412777A1 |
| Устройство для подводного вертикального вытяжения позвоночника | 1978 |
|
SU741873A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ДЕФОРМАЦИЙ ПОЗВОНОЧНИКА И КОСТЕЙ ТАЗА | 2004 |
|
RU2294731C2 |
| Устройство для лечения позвоночника | 1990 |
|
SU1722494A1 |
Изобретение относится к медицине, а именно к неврологии, и предназначено для консервативного лечения неврологических проявлений остеохондроза позвоночника. Цель - повышение эффективности восстановления подвижности патологически измененных мышц и суставов позвоночника путем приложения к нему динамического ротационно-тракционного воздействия. Устройство состоит из элементов крепления на теле - тазового 2 и грудного 1 поясов с ремешками 3, и размещенных между первыми нагрузочных механизмов, выполненных в виде трехсекционных телескопических штанг 4 с установленными внутри тарированными пружинами сжатия. Каждая из телескопических штанг 4 снабжена динамометрической шкалой. Нагрузочные механизмы устанавливаются между поясами 1,2 в наклонном положении, параллельно по отношению друг к другу, Узлы 10 крепления, посредством которых концы нагрузочных механизмов фиксируются на поясах 1, 2, выполнены таким образом, чтобы обеспечить возможность вращения нагрузочных механизмов относительно точек их крепления в плоскости, параллельной поверхности туловища больного. 4 ил. ел С
ФмА
| Устройство для коррекции позвоночника | 1984 |
|
SU1237205A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Устройство для вытяжения позвоночника | 1984 |
|
SU1258403A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
