Изобретение относится к транспортным судоходным сооружениям, в частности к одному из составных блоков устройства автоматического управления судоходными шлюзами.
Известен датчик проходов судов через створ шлюза, содержащий N радиостанций и М шумопеленгаторных устройств, выходные сигналы которых анализируются и определяется место нахождения судна в заданном районе.
Недостатками данного датчика являются, ограниченная точность, необходимость выделения диапазона радиочастот для работы датчика и сложность устройства,
Известен датчик проходов судов через створ шлюза, содержащий четыре лазерных передатчика, расположенных так, что их лучи, пересекаясь, образуют квадрат. Лучи принимаются оптическим демодулятором судна, по которым определяется точное место судна.
Недостатками данного датчика являются, необходимость оснащения судов оптическими демодуляторами, что ограничивает
класс судов, необходимость специального инженерного оборудования местности для установки лазерных передатчиков в определенных местах.
Известен датчик проходов судов через створ шлюза, содержащий расположенные на берегу рефлектор и центр системного управления, контроля и координации, а на судне - электрооптические приборы для определения расстояния и углов, связанных с дисплеем, который сопряжен с гидроскопом и системой управления рулем.
Недостатками данного датчика являются ограниченные эксплуатационные возможности, обусловленные необходимостью оснащения судов .специальным оборудованием и необходимостью наличия системы автоматического регулирования изменения углов наклона рефлектора из-за изменения глубины реки и из-за различной высоты судов.
Цель изобретения - расширение эксплуатационных возможностей.
Указанная цель достигается тем, что в датчике прохода судов через створ шлюза,
сл
VJ к ы ю ел VI
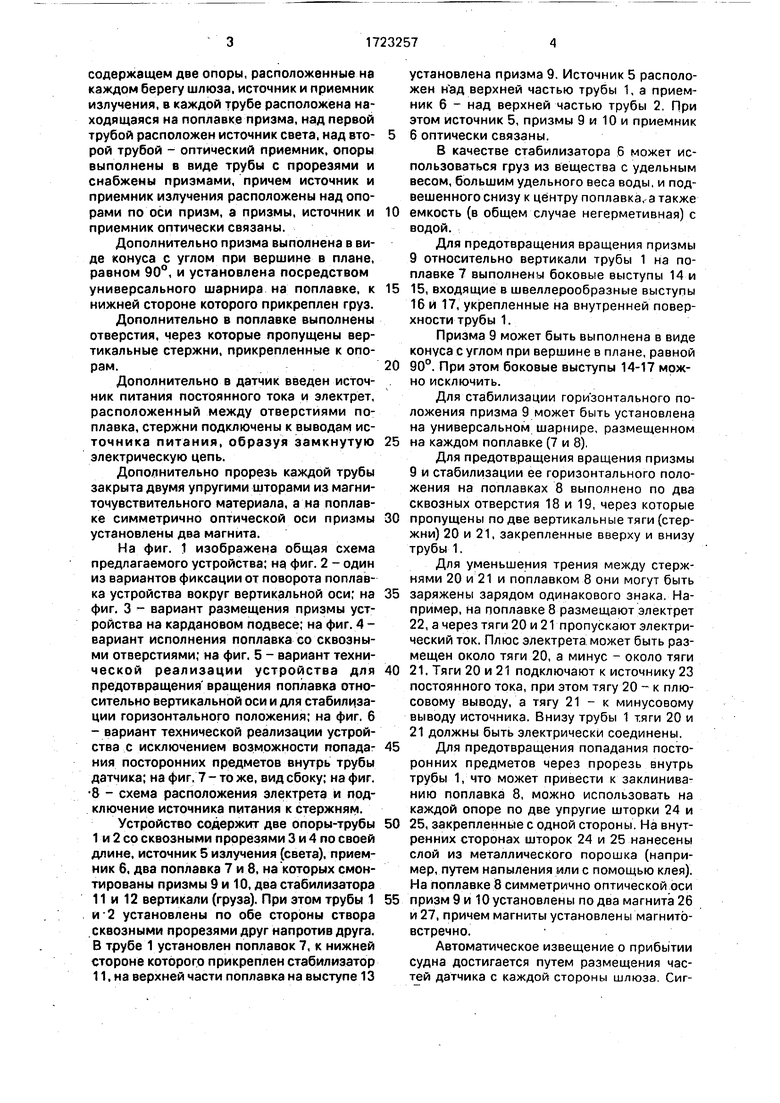
содержащем две опоры, расположенные на каждом берегу шлюза, источник и приемник излучения, в каждой трубе расположена находящаяся на поплавке призма, над первой трубой расположен источник света, над второй трубой - оптический приемник, опоры выполнены в виде трубы с прорезями и снабжены призмами, причем источник и приемник излучения расположены над опорами по оси призм, а призмы, источник и приемник оптически связаны.
Дополнительно призма выполнена в виде конуса с углом при вершине в плане, равном 90°, и установлена посредством универсального шарнира на поплавке, к нижней стороне которого прикреплен груз.
Дополнительно в поплавке выполнены отверстия, через которые пропущены вертикальные стержни, прикрепленные к опорам.
Дополнительно в датчик введен источник питания постоянного тока и электрет, расположенный между отверстиями поплавка, стержни подключены к выводам источника питания, образуя замкнутую электрическую цепь.
Дополнительно прорезь каждой трубы закрыта двумя упругими шторами из магни- точувствительного материала, а на поплавке симметрично оптической оси призмы установлены два магнита.
На фиг. 1 изображена общая схема предлагаемого устройства: на фиг. 2 - один из вариантов фиксации от поворота поплавка устройства вокруг вертикальной оси; на фиг. 3 - вариант размещения призмы устройства на кардановом подвесе; на фиг. 4 - вариант исполнения поплавка со сквозными отверстиями; на фиг. 5 - вариант технической реализации устройства для предотвращения вращения поплавка относительно вертикальной оси и для стабилизации горизонтального положения; на фиг. 6 - вариант технической реализации устройства с исключением возможности попадания посторонних предметов внутрь трубы датчика; на фиг. 7-то же, вид сбоку; на фиг. 8 - схема расположения электрета и подключение источника питания к стержням.
Устройство содержит две опоры-трубы
Iи 2 со сквозными прорезями 3 и 4 по своей длине, источник 5 излучения (света), приемник 6, два поплавка 7 и 8, на которых смонтированы призмы 9 и 10, два стабилизатора
I1и 12 вертикали (груза). При этом трубы 1 и 2 установлены по обе стороны створа сквозными прорезями друг напротив друга. В трубе 1 установлен поплавок 7, к нижней стороне которого прикреплен стабилизатор 11. на верхней части поплавка на выступе 13
установлена призма 9. Источник 5 расположен над верхней частью трубы 1, а приемник 6 - над верхней частью трубы 2. При этом источник 5, призмы 9 и 10 и приемник
6 оптически связаны.
В качестве стабилизатора 6 может использоваться груз из вещества с удельным весом, большим удельного веса воды, и подвешенного снизу к центру поплавка, а также
0 емкость (в общем случае негерметивная) с водой.
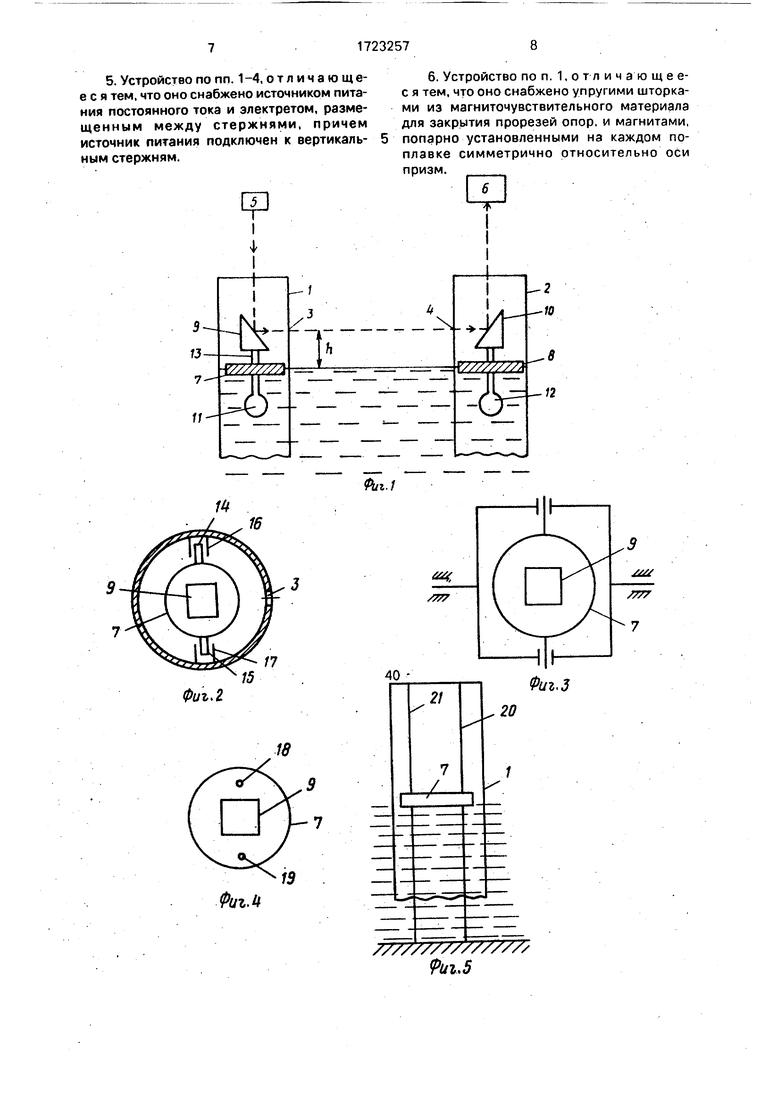
Для предотвращения вращения призмы 9 относительно вертикали трубы 1 на поплавке 7 выполнены боковые выступы 14-и
5 15, входящие в швеллерообразные выступы 16 и 17, укрепленные на внутренней поверхности трубы 1.
Призма 9 может быть выполнена в виде конуса с углом при вершине в плане, равной
0 90°. При этом боковые выступы 14-17 можно исключить.
Для стабилизации горизонтального положения призма 9 может быть установлена на универсальном шарнире, размещенном
5 на каждом поплавке (7 и 8),
Для предотвращения вращения призмы 9 и стабилизации ее горизонтального положения на поплавках 8 выполнено по два сквозных отверстия 18 и 19, через которые
0 пропущены по две вертикальные тяги (стержни) 20 и 21, закрепленные вверху и внизу трубы 1.
Для уменьшения трения между стержнями 20 и 21 и поплавком 8 они могут быть
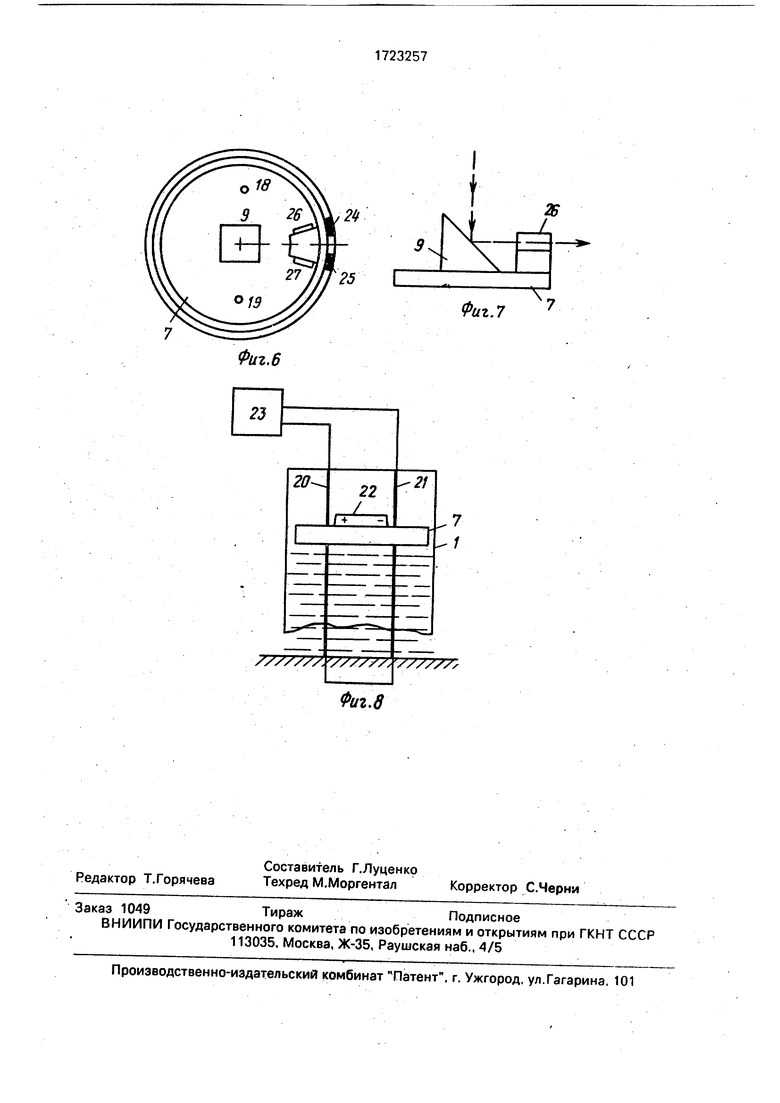
5 заряжены зарядом одинакового знака. Например, на поплавке 8 размещают электрет 22, а через тяги 20 и 21 пропускают электрический ток. Плюс электрета может быть размещен около тяги 20, а минус - около тяги
0 21. Тяги 20 и 21 подключают к источнику 23 постоянного тока, при этом тягу 20 - к плюсовому выводу, а тягу 21 - к минусовому выводу источника. Внизу трубы 1 т.яги 20 и 21 должны быть электрически соединены,
5 Для предотвращения попадания посторонних предметов через прорезь внутрь трубы 1, что может привести к заклиниванию поплавка 8, можно использовать на каждой опоре по две упругие шторки 24 и
0 25, закрепленные с одной стороны. На внутренних сторонах шторок 24 и 25 нанесены слой из металлического порошка (например, путем напыления или с помощью клея). На поплавке 8 симметрично оптической оси
5 призм 9 и 10 установлены по два магнита 26 и 27, причем магниты установлены магнито- встречно.
Автоматическое извещение о прибытии судна достигается путем размещения частей датчика с каждой стороны шлюза. Сигнал с приемника 6 подается в соответствующую электронную систему шлюза.
Датчик работает следующим образом.
Свет от источника 5, например лазера, попадает на призму 9, расположенную на поплавке 7, отражается от нее и через прорези 3 и 4 попадает на призму 10, расположенную на поплавке 8. Отразившись от призмы 9, свет попадает на приемник 6, например, на фотодиод.
Шлюзуемое судно проходит между трубами 1 и 2 и прерывает оптическую связь между источником 5 и приемником 6. Оптический входной сигнал приемника б равен нулю. При этом на выходе приемника б появляется сигнал, который извещает о прибытии судна с включением системы управления его шлюзованием.
Для предотвращения ложных срабатываний, например от пролета птицы, выходной сигнал приемника 6 может сравниваться по длительности с эталонным сигналом.
При изменении уровня воды в шлюзе или в бьефах шлюзов изменяется уровень воды в трубах 1 и 2 и тем самым изменяется высота поплавков 7 и 8 (и соответственно призм 9 и 10) относительно дна шлюза (реки), но высота расположения призм 9 и 10 относительно горизонта воды в шлюзах остается неизменной,равной h.
Для стабилизации горизонтального положения призм 9 и 10 можно использовать размещение их на универсальном шарнире (кардановом подвесе). Сам карданов подвес размещают на определенной высоте относительно плоскости поплавков 7 и 8.
Для исключения вращения призм 9 и 10 относительно вертикальной оси на поплавках размещены с двух сторон боковые выступы 14 и 15 симметрично относительно центра каждого поплавка. При изменении высоты воды в шлюзе или бьефе боковые выступы 14 и 15 перемещаются в швеллеро- образных выступах 16 и 17, установленных на внутренней поверхности труб 1 и 2 по их длине.
Для исключения вращения призм относительно вертикальной оси, а также для стабилизации их горизонтального положения могут использоваться вертикальные тяги 21 и 22. При изменении уровня воды в шлюзе или в бьефе поплавок 7 перемещается вверх или вниз, двигаясь относительно вертикальных тяг 20 и 21, которые пропущены через отверстия 18 и 19, расположены симметрично относительно центра поплавков и симметрично относительно оптически осей призм 9 и 10.
При работе датчика в реальных условиях через прорезь труб 1 и 2 внутрь ее могут попадать посторонние предметы и микро организмы, которые препятствуют переме- 5 щению поплавков 7 и 8 и тем самым могут создавать аварийную ситуацию.
Прорезь закрыта двумя гибкими шторками 24 и 25. Каждая шторка прикреплена к одной стороне прорези трубы 1, Другие сто
0 роны шторок 24 и 25 по своей длине соприкасаются одна с другой по центру прорези трубы 1.
При перемещении поплавков 7 и 8 наиболее близкие намагниченные с внутренней
5 стороны участки шторок 24 и 25 притягиваются к постоянным магнитам 26 и 27. размещенным на поплавках. При перемещении данных участков шторок 24 и 25 в трубе 1 образуется сквозное отверстие для созда0 ния оптической связи между источником 5 и приемником 6. Необходимо отметить, что данное отверстие возникает на высоте h от горизонта воды.
При дальнейшем перемещении поплав5 ка 7 под действием упругих сил данные участки шторок 24 и 25 возвращаются в исходное состояние и соприкасаются друг с другом, препятствуя попаданию посторонних предметов внутрь трубы 1.
0 Формула изобретения
1.Устройство регистрации прохода судов через створ шлюза, содержащее источник и приемник излучения, расположенные на опорах на противоположных берегах
5 шлюза, отличающееся тем, что, с целью расширения эксплуатационных возможностей, указанные опоры выполнены трубчатыми с вертикальными прорезями, обращенными одна к другой, а устройство
0 .снабжено оптическими призмами, размещенными внутри этих опор, причем упомянутые источник и приемник излучения расположены соосно с соответствующими опорами на их верхних частях и оптически
5 Связаны между собой через указанные призмы.
2.Устройство поп. 1, о т л и ч а ю щ е е- с я тем, что, оптическая призма выполнена В виде конуса с углом раскрытия 90°.
0 3. Устройство по п. 1,отличаю щее- с я тем, что оно снабжено поплавками с подвешенными к ним снизу грузами, которые расположены внутри указанных опор, а призмы смонтированы на этих поплавках
5 посредством универсальных шарниров.
4. Устройство по пп. 1-3, отличающееся тем, что поплавки выполнены с отверстиями, а указанные опоры снабжены верти- . кальными стержнями, прикрепленными к ним и пропущенным в эти отверстия.
5. Устройство по по. 1 -4, о т л и ч а ю щ е- е с я тем, что оно снабжено источником питания постоянного тока и электретом, размещенным между стержнями, причем источник питания подключен к вертикальным стержням.
6. Устройство по п. 1. о т л и ч а ю щ е е- с я тем, что оно снабжено упругими шторками из магниточувствительного материала для закрытия прорезей опор, и магнитами, попарно установленными на каждом поплавке симметрично относительно оси призм.

| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК АЭРОМЕТРИЧЕСКИХ ДАВЛЕНИЙ | 2018 |
|
RU2702808C1 |
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ОКРУЖАЮЩЕГО И НАБЕГАЮЩЕГО ВОЗДУШНЫХ ПОТОКОВ НА ЛЕТАТЕЛЬНЫХ АППАРАТАХ | 2022 |
|
RU2796818C1 |
| ДАТЧИК СТАТИЧЕСКОГО И ПОЛНОГО ДАВЛЕНИЙ | 2020 |
|
RU2762543C1 |
| Датчик давления, использующий оптический метод преобразования информации | 2022 |
|
RU2785033C1 |
| ДАТЧИК АЭРОМЕТРИЧЕСКИХ ДАВЛЕНИЙ | 2017 |
|
RU2684683C1 |
| ПАРУСНО-МОТОРНОЕ СУДНО СТАШЕВСКОГО И.И. | 2004 |
|
RU2258636C1 |
| ДАТЧИК ДАВЛЕНИЯ, ИСПОЛЬЗУЮЩИЙ ОПТИЧЕСКИЙ МЕТОД ПРЕОБРАЗОВАНИЯ ИНФОРМАЦИИ | 2017 |
|
RU2653596C1 |
| РОТОРНЫЙ ВЕРТИКАЛЬНЫЙ ВЕТРОДВИГАТЕЛЬ | 2008 |
|
RU2368800C1 |
| РОТОРНЫЙ ВЕТРОДВИГАТЕЛЬ | 2011 |
|
RU2479748C2 |
| МОТОРНО-ПАРУСНОЕ СУДНО | 2006 |
|
RU2323125C1 |
:Изобретение относится к гидротехнике. Цель изобретения - расширение эксплуатационных возможностей. Устройство содержит две трубчатые опоры 1 и 2 с прорезями 3 и 4, в которых на поплавках 7 и 8 размещены оптические призмы 9 и 10. Над опорами расположены источник 5 излучения и приемник 6, связанные оптической связью через призмы 9 и 10 и прорези. 5 з.п. ф-лы, 8 ил.
Риг.Ц
Ptti.5
Фиг.6
20Г -1
//S/S/.
Л
7 1
//////S
Фиг.8
| Способ определения дымообразующей способности строительных материалов | 1973 |
|
SU463900A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| , Заявка Японии № 60-15289, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Патент ГДР Nfe 245736, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
