Изобретение относится к контрольно- измерительной технике и может быть использовано при создании датчиковой аппаратуры, например, для измерения перемещений.
Известно устройство, содержащее источник переменного напряжения, преобразователь, масштабирующий контур в виде последовательно включенных фазовращателя и масштабирующего звена, сумматор и фазометр.
Известен дифференциально-трансформаторный датчик перемещений, содержащий ферромагнитный сердечник, ферромагнитный якорь, замыкающую ферромагнитную пластину, две секции первичной обмотки, две секции вторичной обмотки, дополнительную секцию вторичной обмотки, два фазосдвигающих контура и фазометр.
Недостатком известного датчика является низкая точность измерения, вызванная
большой температурной погрешностью, возникающей вследствие изменения углов сдвига фаз между геометрически суммируемыми рабочими и компенсационными напряжениями от воздействия температуры, электромагнитных наводок и других внешних дестабилизирующих факторов.
Цель изобретения - повышение точности измерения перемещений.
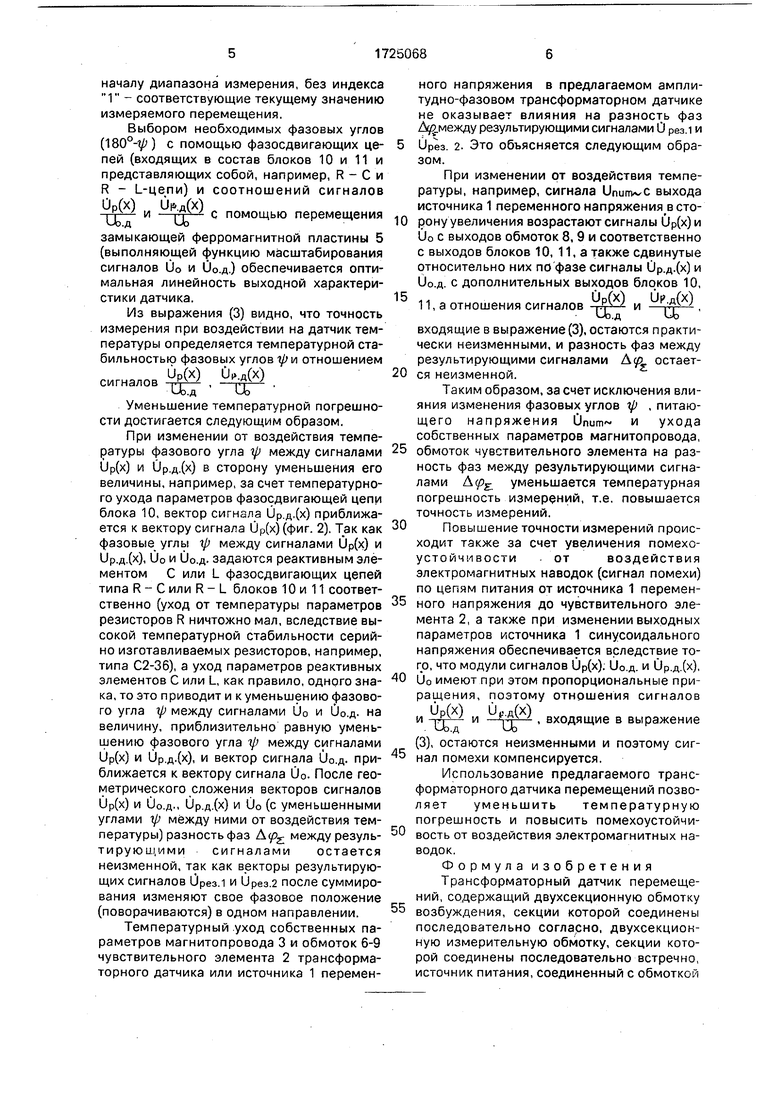
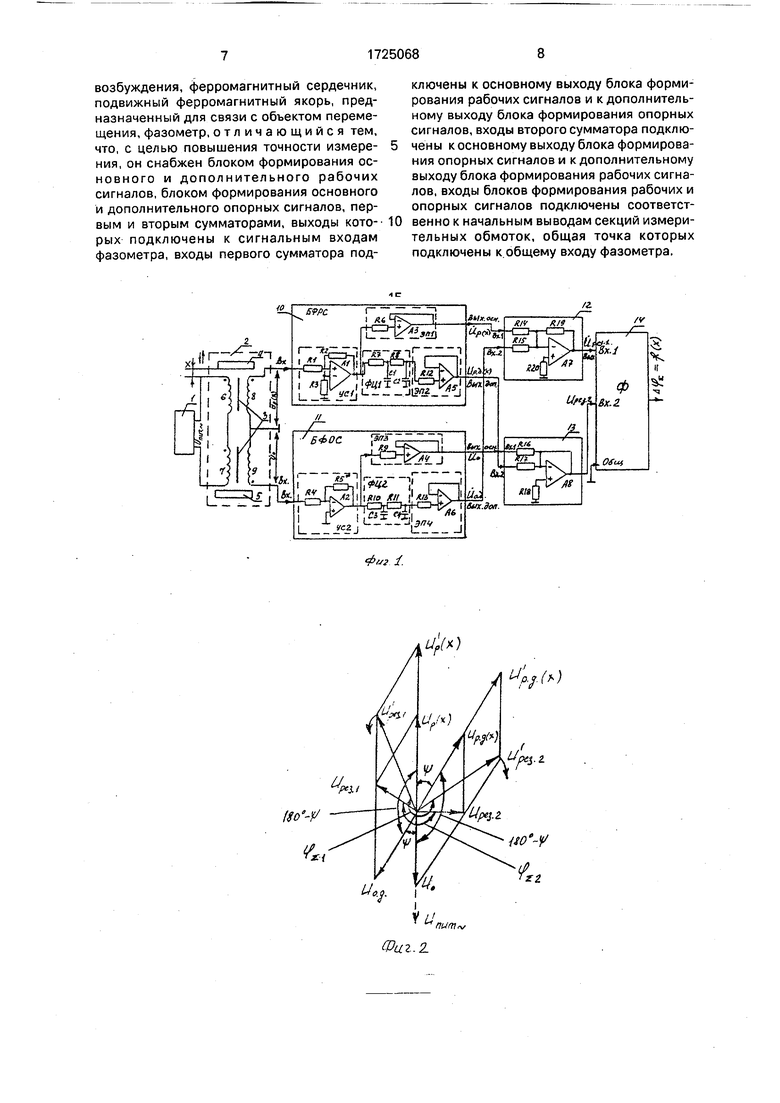
На фиг. 1 представлена схема датчика с примером выполнения блоков формирования сигналов; на фиг. 2 - векторная диаграмма сигналов.
Трансформаторный датчик перемещений (фиг. 1) содержит источник 1 переменного напряжения, трансформаторный датчик 2, включающий ферромагнитный сердечник 3, ферромагнитный якорь 4, связываемый в процессе измерения с контролируемым объектом, замыкающую ферромагнитную пластину 5, две секции 6 и 7 обмотки возбуждения, соединенные поVI
ГО
сл
О
о
00
следовательно-согласно, две секции 8 и 9, измерительной обмотки, соединенные последовательно-встречно. Датчик содержит также блок 10 формирования основного Up(x) и дополнительного ир.д.(х) рабочих сигналов, блок 11 формирования основного Do и дополнительного 11о.д. опорных сигналов, два сумматора 12 и 13, регистрирующий прибор - фазометр 14.
Трансформаторный датчик перемещений работает следующим образом.
При подключении секций 6 и 7 обмотки возбуждения к источнику 1 переменного напряжения в секциях 8 и 9 измерительной обмотки чувствительного элемента 2 датчика возбуждаются рабочее напряжение Ор(х) и опорное (компенсационное) напряжение и0 соответственно, которые за счет последовательно встречного включения секций 8, 9 измерительной обмотки сдвинуты по фазе на 180 . Рабочее напряжение 1)р(х)с выхода секции 8 измерительной обмотки поступает на вход блока 10 формирования основного и дополнительного рабочих сигналов, в котором формируются основной ир(х)и допол- нительный Ор.д.(х) синусоидальные сигналы, сдвинутые друг относительно друга по фазе на угол р , величина которого устанавливается фазосдвигающей цепью, входящей в состав блока 10, таким образом, чтобы угол (180°- V) находился в пределах более 90°, но менее 180° (фиг. 2).
Выбором величины угла обеспечивается оптимальная линейность выходной характеристики датчика.
Опорное напряжение Оо с выхода секции 9 измерительной обмотки поступает на вход блока 11 формирования основного и дополнительного опорных сигналов, в котором формируется основной Оо и дополнительный Оо.д синусоидальные сигналы, сдвинутые друг относительно друга по фазе так же, как и рабочие сигналы Ор(х) и Ор.д(х) на угол . Основной рабочий Ор(х) с выхода Вых.осн. блока 10 и дополнительный опорный Оо.д. сигналы с выхода Вых.доп. блока 11 поступают на первый и второй входы сумматора 12 соответственно.
Основной опорный Оо с выхода Вых.осн. блока 11 и дополнительный рабочий Ор.д.(х) сигналы с выхода Вых.доп, блока 10 поступают нав первый и второй входы сумматора 13 соответственно.
На сумматоре 12 происходит геометрическое сложение основного рабочего Ор(х) и дополнительного опорного Оо.д. сигналов, С выхода сумматора 12 результирующий сигнал Орез.1 поступает на первый вход(Вх.1) фазометра 14.
0
5
На сумматоре 13 происходит геометрическое сложение основного опорного Оо и дополнительного рабочего Ор.д.(х) сигналов. С выхода сумматора 13 результирующий сигнал Орез.2 поступает на второй вход (Вх.2) фазометра 14.
При перемещении контролируемого объекта и связанного с ним якоря 4 в направлении увеличения зазора X обеспечивается модуляция напряжения Ор(х), снимаемого с секции 8 измерительной обмотки, а следовательно, и напряжения Ор.д.(х), Ор(х), а именно сигналы Ор(х) и Ор.д.(х) на выходе блока 10 возрастают.
Функция преобразования датчика может быть получена из выражений
,-arog Sin(18QP- W У «cos(180°-V +Jg3
ф -nrcta slndaOP-q)
(р - dl Ыуhf-ry
Lсоз(180°-)
0)
,2)
где 9( текущее значение фазы результирующих суммарных сигналов Орез.1, 0Рез.2 соответственно относительно вектора напряжения питания
V( угол сдвига фаз между основными Ор(х), Оо и дополнительными Ор.д.(х) и Оо.д.
сигналами соответственно;
Ор(х), Ор.д.(х) - модулированные по амплитуде в функции перемещения основной и дополнительный рабочие сигналы;
Оо, Оо.д. основной и дополнительный
опорные сигналы.
При изменении модулированных сигналов Ор(х) и Ор.д.(х) на выходах блока 10 в функции перемещения изменяются величина и фаза результирующих сигналов Орез.1 и
Орез. 2 на выходах сумматоров 12 и 13 соответственно, вследствие чего изменяется разность фаз Д. (от значения рЈ до значения ) между результирую щи ми сигналами, которая является выходным сигналом данного датчика, регистрируемым фазометром 14.
k,+ z arctg
+ arctg sln(180° -VQ cos(l80°-VO+-W sln(18QP-#)
cos(180°
Цо.д. (3)
С выхода регистрирующего прибора - фазометра 14 снимается зависимость разности фаз между результирующими сигналами от измеряемого перемещения р f(x).
На векторной диаграмме (фиг. 2) индексом 1 обозначены сигналы устройства для измерения перемещений, соответствующие
началу диапазона измерения, без индекса 1 - соответствующие текущему значению измеряемого перемещения.
Выбором необходимых фазовых углов (180°-) с помощью фазосдвигающих цепей (входящих в состав блоков 10 и 11 и представляющих собой, например, R - С и R - L-цепи) и соотношений сигналов
Ор(х) йрдГх)
. | и - .Iх с помощью перемещения
Уо.дUD
замыкающей ферромагнитной пластины 5 (выполняющей функцию масштабирования сигналов Оо и Оо.д.) обеспечивается оптимальная линейность выходной характеристики датчика.
Из выражения (3) видно, что точность измерения при воздействии на датчик температуры определяется температурной стабильностью фазовых угловой отношением
Ор(х) 0|.д(х) сигналов i.p , -рт
Уменьшение температурной погрешности достигается следующим образом.
При изменении от воздействия температуры фазового угла гр между сигналами Ор(х) и Ор.д.(х) в сторону уменьшения его величины, например, за счет температурного ухода параметров фазосдвигающей цепи блока 10, вектор сигнала Ор.д.(х) приближается к вектору сигнала Ор(х) (фиг. 2). Так как фазовые углы р между сигналами Ор(х) и Ор.д.(х), Оо и Оо.д. задаются реактивным элементом С или L фазосдвигающих цепей типа R - С или R - L блоков 10 и 11 соответственно (уход от температуры параметров резисторов R ничтожно мал, вследствие высокой температурной стабильности серийно изготавливаемых резисторов, например, типа С2-36), а уход параметров реактивных элементов С или L, как правило, одного знака, то это приводит и к уменьшению фазового угла гр между сигналами 00 и О0.д. на величину, приблизительно равную уменьшению фазового угла тр между сигналами Ор(х) и Ор.д.(х), и вектор сигнала Оо.д. приближается к вектору сигнала 00. После геометрического сложения векторов сигналов Ор(х) и Оо.д., Ор.д.(х) и Оо (с уменьшенными углами Ц) между ними от воздействия температуры) разность фаз между результирующими сигналами остается неизменной, так как векторы результирующих сигналов Орез.1 и Орез.2 после суммирования изменяют свое фазовое положение (поворачиваются) в одном направлении.
Температурный .уход собственных параметров магнитопровода 3 и обмоток 6-9 чувствительного элемента 2 трансформаторного датчика или источника 1 перемен0
5
0
5
0
5
0
5
0
11, а отношения сигналов
5
ного напряжения в предлагаемом амплитудно-фазовом трансформаторном датчике не оказывает влияния на разность фаз ДЈ между результирующими сигналами 0 Рез.1 и
Орез. 2. Это объясняется следующим образом.
При изменении от воздействия температуры, например, сигнала выхода источника 1 переменного напряжения в сторону увеличения возрастают сигналы Ор(х)и Оо с выходов обмоток 8, 9 и соответственно с выходов блоков 10, 11, а также сдвинутые относительно них по фазе сигналы Ор.д.(х) и Оо.д с дополнительных выходов блоков 10,
ОР(Х) и ОР.Д(Х)
vJo.flЫэ
входящие в выражение (3), остаются практически неизменными, и разность фаз между результирующими сигналами остается неизменной.
Таким образом, за счет исключения влияния изменения фазовых углов tp , питающего напряжения Onum и ухода собственных параметров магнитопровода, обмоток чувствительного элемента на разность фаз между результирующими сигналами Д р уменьшается температурная погрешность измерений, т.е. повышается точность измерений.
Повышение точности измерений происходит также за счет увеличения помехоустойчивости отвоздействия электромагнитных наводок (сигнал помехи) по цепям питания от источника 1 переменного напряжения до чувствительного элемента 2, а также при изменении выходных параметров источника 1 синусоидального напряжения обеспечивается вследствие того, что модули сигналов Ор(х); Оо.д. и 0Р.д.(х), Оо имеют при этом пропорциональные приращения, поэтому отношения сигналов
и iJp и . входящие в выражение
(3), остаются неизменными и поэтому сигнал помехи компенсируется.
Использование предлагаемого трансформаторного датчика перемещений позволяет уменьшить температурную погрешность и повысить помехоустойчивость от воздействия электромагнитных наводок.
Формула изобретения Трансформаторный датчик перемещений, содержащий двухсекционную обмотку возбуждения, секции которой соединены последовательно согласно, двухсекционную измерительную обмотку, секции которой соединены последовательно встречно, источник питания, соединенный с обмоткой
возбуждения, ферромагнитный сердечник, подвижный ферромагнитный якорь, предназначенный для связи с объектом перемещения, фазометр, отличающийся тем, что, с целью повышения точности измерения, он снабжен блоком формирования основного и дополнительного рабочих сигналов, блоком формирования основного и дополнительного опорных сигналов, первым и вторым сумматорами, выходы кото-- рых подключены к сигнальным входам фазометра, входы первого сумматора под0
ключены к основному выходу блока формирования рабочих сигналов и к дополнительному выходу блока формирования опорных сигналов, входы второго сумматора подключены к основному выходу блока формирования опорных сигналов и к дополнительному выходу блока формирования рабочих сигналов, входы блоков формирования рабочих и опорных сигналов подключены соответственно к начальным выводам секций измерительных обмоток, общая точка которых подключены к.общему входу фазометра.

| название | год | авторы | номер документа |
|---|---|---|---|
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| Преобразователь перемещение-фаза | 1991 |
|
SU1827525A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1737259A1 |
| Устройство для измерения линейных перемещений | 1984 |
|
SU1231387A1 |
| Силоизмерительный датчик | 1982 |
|
SU1093920A1 |
| Способ преобразования перемещение-фаза | 1987 |
|
SU1474446A1 |
| Индуктивный датчик перемещения с фазовым выходом | 1987 |
|
SU1527485A1 |
| Оптический датчик перемещений с фазовым выходом | 1991 |
|
SU1803736A1 |
| Амплитудно-фазовый оптический датчик перемещений | 1989 |
|
SU1670408A1 |
Изобретение относится к контрольно- измерительной технике. Цель изобретения - повышение точности. Поставленная цель достигается тем, что в датчик, содержащий трансформаторный преобразователь с двумя парами обмоток возбуждения и измерения, источник переменного напряжения, фазометр, ведены блоки формирования рабочего и опорного сигналов и два сумматора. Повышение точности достигается за счет уменьшения температурной погрешности и увеличения помехоустойчивости за счет исключения влияния изменения фазовых сдвигов питающего напряжения и ухода параметров магнитной системы. 2 ил.
| Способ преобразования перемещение - фаза | 1984 |
|
SU1260664A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
