Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения перемещений объектов.
Известен преобразователь линейных перемещений, содержащий подвижный якорь, два соосно расположенных ферромагнитных сердечника с размещенными в i них измерительной и компенсационной обмотками.
Недостаток указанного устройства заключается в значительной нелинейности выходной характеристики, обусловленной резким изменением пространственных характеристик электромагнитного поля.
Известно устройство для измерения перемещений, содержащее источник питания, дифференциально-трансформаторный преобразователь перемещений с первичными последовательно включенными обмотками, подключенными к выходу блока питания, и вторичными обмотками, включенными встречно, фазосдвигающую цепь, вход которой подключен к одному из сигнальных выводов вторичной обмотки, например компенсационной, блок формирования сигналов, входы которого соединены с выходом фазосдвигающей цепи и вторым сигнальным выводом вторичных обмоток.
Недостатками этого преобразователя являются большие габаритно-весовые параметры, обусловленные тем, что дифферен- циально-трансформаторный преобразователь перемещений (чувствительный элемент) содержит две первичные обмотки (рабочую и компенсационную), включенные последовательно, и две вторичные обмотки (рабочую и компенсационную), а также тем, что в состав преобразователя входит отдельный узел (фазосдвигающая цепь), осуществляющий дополнительный сдвиг синусоидального сигнала с выхода вторичной рабочей обмотки относительно сигнала с выхода вторичной компенсационной обмотки; большая температурная погрешность измерений, обусловленная
(Л
С
XI
со х| ISD ел ю
асимметричными условиями работы рабочей и компенсационной частей вследствие шунтирующего действия на секцию вторичной обмотки рабочей части параллельно подключенной фазосдвигающей цепи (на- пример, типа R-C или R-L), что приводит к паразитному изменению фазы суммарного сигнала за счет непропорционального изменения по величине геометрически суммиру- емых сигналов при воздействии температуры.
Цель изобретения -уменьшение температурной погрешности.
Поставленная цель достигается тем, что в устройство для измерения перемещений введены первый и второй резисторы, выход блока питания через, соответственно, первый и второй резисторы подключен к началам соответственно рабочей и компенсационной обмоток, концы которых подключены к шине нулевого потенциала, начала компенсационной и рабочей обмотки подключены соответственно к прямому и инверсному входам дифференциального усилителя, выход которого является выхо- дом устройства.
Использование изобретения позволяет уменьшить габаритно-весовые характеристики вследствие того, что в чувствительном элементе используются две обмотки (вме- сто четырех обмоток, используемых в устройстве-прототипе), а также вследствие использования последовательно соединенных обмоток и подборных резисторов в качестве фазосдвигающей цепи, т. е. исключить специальный фазосдвигающий узел (цепь), входящий в состав устройства- прототипа; уменьшить температурную погрешность измерения, обусловленную температурной нестабильностью датчика ввиду асимметрии условий работы рабочей и компенсационной частей вследствие шунтирующего действия на вторичную рабочую обмотку рабочей части чувствительного элемента фазосдвигающей цепи, которая в ус- тройстве-прототипеподключена
параллельно вторичной обмотке рабочей части и приводит к паразитному изменению фазы суммарного сигнала за счет непропорционального изменения по величине гео- метрически суммируемых сигналов при воздействии температуры.
В предлагаемом датчике шунтирующее действие фазосдвигающего контура на вторичную обмотку рабочей части исключено, так как необходимый сдвиг по фазе между суммируемыми напряжениями устанавливается за счет использования последовательно соединенных обмоток и подборных резисторов.
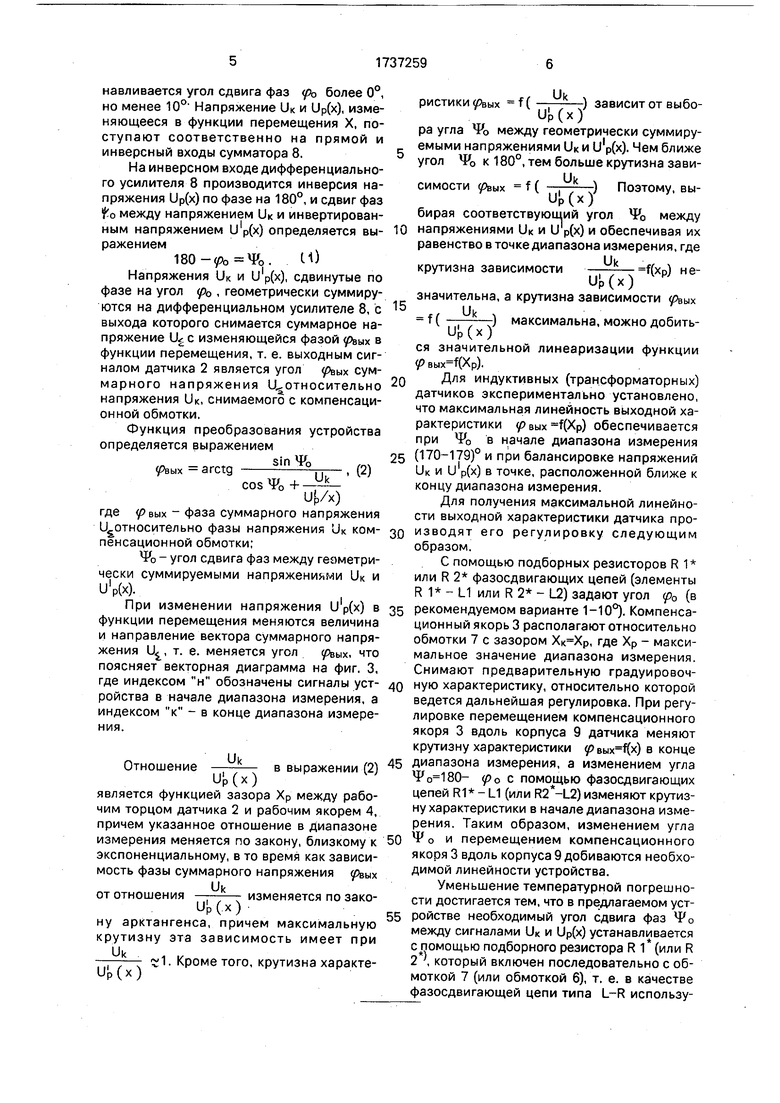
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - схема индуктивного датчика; на фиг. 3 - векторная диаграмма работы устройства.
Устройство для измерения перемещений содержит блок 1 питания, индуктивный датчик 2 перемещений (чувствительный элемент), выполненный в виде рабочей обмотки
6и компенсационной обмотки 7, последовательно с которыми включены подборные резисторы R 1 и R 2, рабочий 4 и компенсационный 3 якори и дифференциальный усилитель (сумматор) 8, первый вход которого подключен к точке соединения подборного резистора R 1 с компенсационной обмоткой 7, второй вход сумматора подключен кточке соединения подборного резистора R 2 с рабочей обмоткой 6, свободные выводы резисторов R 1 и R 2 соединены с выходом блока 1 питания, шина нулевого потенциала подключена к общей точке соединения свободных выводов рабочей 6 и компенсационной 7 обмоток и к общим выводам блока 1 питания и дифференциального усилителя 8.
Индуктивный датчик 2 перемещений представляет собой (фиг. 2) ферромагнитный корпус 9, внутри которого размещен ферромагнитный сердечник 5, на котором расположены рабочая 6 и компенсационная
7обмотки. В компенсационной половине преобразователя (на фиг. 2 вверху) расположен компенсационный якорь 3, Измерение перемещения ведется относительно рабочего якоря 4.
Устройство работает следующим образом.
Синусоидальное напряжение Un с выхода блока 1 питания, переменного напряжения (см. фиг. 1), имеющего малое внутреннее сопротивление, через подборные резисторы R 1 , R 2 поступает для питания рабочей 6 и компенсационной 7 обмоток датчика 2. При перемещении рабочего якоря 4, например, в сторону увеличения зазора Хр уменьшается индуктивность, а также индуктивное и полное сопротивление рабочей обмотки 6 датчика. Так как блок 1 питания имеет малое внутреннее сопротивление, то при уменьшении полного сопротивления обмотки 6 уменьшается по амплитуде сигнал Up(x), снимаемый с точки соединения подборного резистора R 2 с обмоткой 6, по закону, близкому к экспоненциальному. Между компенсационным напряжением (снимаемым с точки соединения подборного резистора R 1 и компенсационной обмотки 7) ик и рабочим напряжением 1)р(х) jryTCM подбора резисторов R 1, R 2 устанавливается угол сдвига фаз ро более 0°, но менее 10° Напряжение UK и UP(x), изменяющееся в функции перемещения X, поступают соответственно на прямой и инверсный входы сумматора 8.
На инверсном входе дифференциального усилителя 8 производится инверсия напряжения Up(x) по фазе на 180°, и сдвиг фаз to между напряжением UK и инвертированным напряжением U P(X) определяется выражением
180-рь . И)
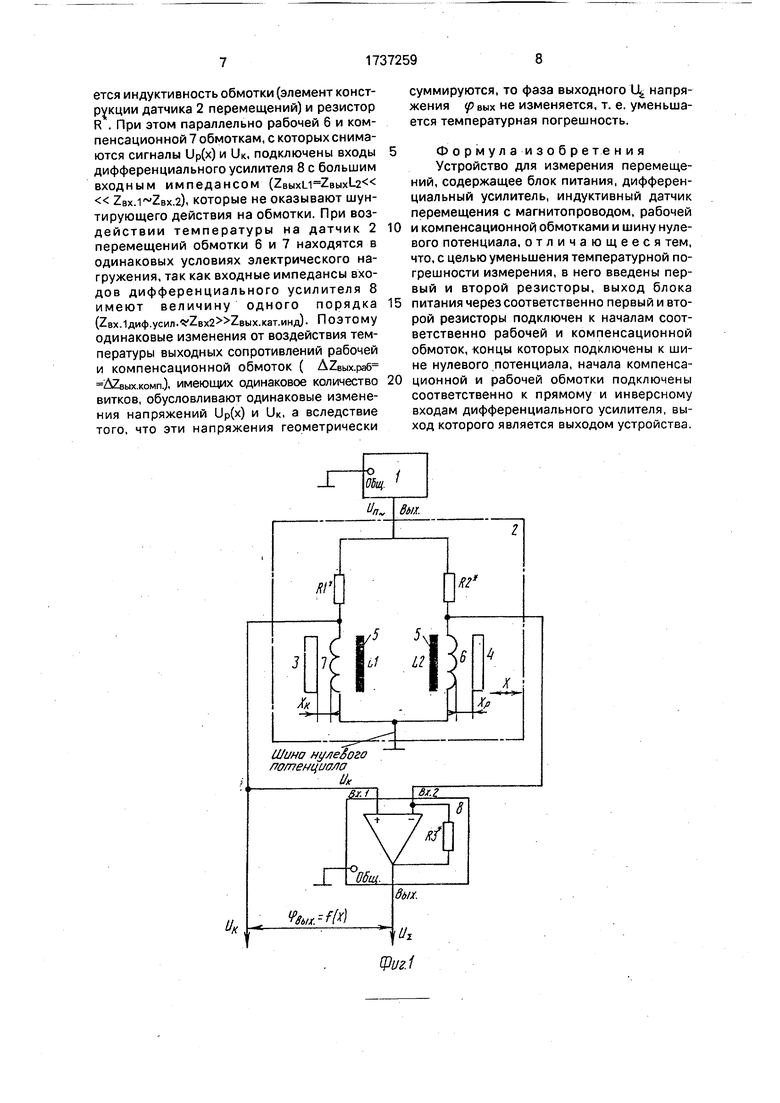
Напряжения UK и U P(X), сдвинутые по фазе на угол (fa , геометрически суммируются на дифференциальном усилителе 8, с выхода которого снимается суммарное напряжение Ц; с изменяющейся фазой рвык в функции перемещения, т. е. выходным сигналом датчика 2 является угол рвых суммарного напряжения относительно напряжения UK, снимаемого с компенсационной обмотки.
Функция преобразования устройства определяется выражением
рвьк arctg
COS o-hUk
, (2)
Up/x)
где фаза суммарного напряжения U-относительно фазы напряжения UK компенсационной обмотки;
Ф0 - угол сдвига фаз между геометрически суммируемыми напряжениями UK и U p(x).
При изменении напряжения U р(х) в функции перемещения меняются величина и направление вектора суммарного напряжения Ц, т. е. меняется угол вых, что поясняет векторная диаграмма на фиг. 3, где индексом н обозначены сигналы устройства в начале диапазона измерения, а индексом к - в конце диапазона измерения.
Отношение
Uk
в выражении (2)
Up(x)
является функцией зазора Хр между рабочим торцом датчика 2 и рабочим якорем 4, причем указанное отношение в диапазоне измерения меняется по закону, близкому к экспоненциальному, в то время как зависимость фазы суммарного напряжения вых
Uk
от отношения
UP(X)
изменяется по закону арктангенса, причем максимальную крутизну эта зависимость имеет при
Uk 1. Кроме того, крутизна характеир(х)
Uk
-) за висит от вы бо
ристикирвых f(,
Up(x)
pa угла fo между геометрически суммируемыми напряжениями UK и U P(X). Чем ближе угол W0 к 180°, тем больше крутизна завиUk
СИМОСТИ (рвы f (
Up(x)
) Поэтому, выбирая соответствующий угол между
10 напряжениями UK и U р(х) и обеспечивая их
равенство в точке диапазона измерения, где
Uk
крутизна зависимости (p) неUp(x)
значительна, а крутизна зависимости . 15Uk
f () максимальна, можно добитьир(х)
ся значительной линеаризации функции р (Xp).
2Q Для индуктивных (трансформаторных) датчиков экспериментально установлено, что максимальная линейность выходной характеристики р вых -f(Xp) обеспечивается при Фо в начале диапазона измерения
25 (170-179)° и при балансировке напряжений UK и и р(х) в точке, расположенной ближе к концу диапазона измерения.
Для получения максимальной линейности выходной характеристики датчика проЗо изводят его регулировку следующим образом.
С помощью подборных резисторов R 1 или R 2 фазосдвигающих цепей (элементы R 1 - L1 или R 2 - L2) задают угол р0 (в
35 рекомендуемом варианте 1-10°). Компенсационный якорь 3 располагают относительно обмотки 7 с зазором , где Хр - максимальное значение диапазона измерения. Снимают предварительную градуировоч40 ную характеристику, относительно которой ведется дальнейшая регулировка. При регулировке перемещением компенсационного якоря 3 вдоль корпуса 9 датчика меняют крутизну характеристики (x) в конце
45 диапазона измерения, а изменением угла р о с помощью фазосдвигающих цепей R1 - L1 (или R2 -L2) изменяют крутизну характеристики в начале диапазона измерения. Таким образом, изменением угла
50 и перемещением компенсационного якоря 3 вдоль корпуса 9 добиваются необходимой линейности устройства.
Уменьшение температурной погрешности достигается тем, что в предлагаемом уст55 ройстве необходимый угол сдвига фаз о между сигналами U« и Up(x) устанавливается с гюмощью подборного резистора R 1 (или R , который включен последовательно с обмоткой 7 (или обмоткой 6), т. е. в качестве фазосдвигающей цепи типа L-R используется индуктивность обмотки (элемент конструкции датчика 2 перемещений) и резистор R . При этом параллельно рабочей 6 и компенсационной 7 обмоткам, с которых снимаются сигналы Up(x) и UK, подключены входы дифференциального усилителя 8 с большим входным импедансом (2Вых1 1 2вых1-2« « 2вх..2), которые не оказывают шунтирующего действия на обмотки. При воздействии температуры на датчик 2 перемещений обмотки 6 и 7 находятся в одинаковых условиях электрического на- гружения, так как входные импедансы входов дифференциального усилителя 8 имеют величину одного порядка
(Zex..ycMfl.vZBx2 ZBbix.KaT.KiHfl). ПОЭТОМУ
одинаковые изменения от воздействия температуры выходных сопротивлений рабочей и компенсационной обмоток ( AZBbix.pa6 AZebix.KOMn.), имеющих одинаковое количество витков, обусловливают одинаковые изменения напряжений Up(x) и UK, а вследствие того, что эти напряжения геометрически
суммируются, то фаза выходного 1 напряжения р вых не изменяется, т. е. уменьшается температурная погрешность.
Ф о р м у л а и з о б р ете н и я
Устройство для измерения перемещений, содержащее блок питания, дифференциальный усилитель, индуктивный датчик перемещения с магнитопроводом, рабочей
и компенсационной обмотками и шину нулевого потенциала, отличающееся тем, что, с целью уменьшения температурной погрешности измерения, в него введены первый и второй резисторы, выход блока
питания через соответственно первый и второй резисторы подключен к началам соответственно рабочей и компенсационной обмоток, концы которых подключены к шине нулевого потенциала, начала компенсационной и рабочей обмотки подключены соответственно к прямому и инверсному входам дифференциального усилителя, выход которого является выходом устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения перемещений | 1991 |
|
SU1816962A1 |
| АМПЛИТУДНО-ФАЗОВЫЙ ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ С ФАЗОВЫМ ВЫХОДОМ | 2001 |
|
RU2208762C1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1725068A1 |
| Трансформаторный преобразователь перемещений | 1985 |
|
SU1357693A1 |
| Способ преобразования перемещений и устройство для его осуществления | 1988 |
|
SU1518661A1 |
| Преобразователь перемещений | 1987 |
|
SU1441175A1 |
| Трансформаторный датчик перемещений | 1990 |
|
SU1832177A1 |
| Преобразователь перемещений | 1989 |
|
SU1670362A1 |
| Способ преобразования перемещения в фазу и дифференциально-трансформаторный датчик для его осуществления | 1985 |
|
SU1252652A1 |
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 2008 |
|
RU2366892C1 |

Изобретение относится к контрольно- измерительной технике и может быть использовано для измерения перемещений. С целью уменьшения температурной погрешности измерения устройство выполнено в виде рабочей и компенсационной обмоток, размещенных на магнитопроводе и двух подборных резисторов, через которые блок питания запитывает рабочую и компенсационную обмотки, разность сигналов на которых усиливается дифференциальным усилителем. Сигнал на выходе усилителя в некотором диапазоне пропорционален перемещению. 3 ил.
Шина нулевого потенциала
Ик
Iffffai.
UK
Ъш.№
х
Фм.г
№
Фиг.З
| Преобразователь линейных перемещений | 1979 |
|
SU855380A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещений | 1989 |
|
SU1647228A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
