(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННОЕ РЕЛЕ С ТРАНСФОРМАТОРНОЙ РАЗВЯЗКОЙ И С ЗАЩИТОЙ ОТ ПЕРЕГРУЗКИ ПО ТОКУ И ПЕРЕГРЕВА ЭЛЕКТРОННОГО КЛЮЧА | 2008 |
|
RU2380828C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ ПЕРЕГРУЗКИ ПО ТОКУ | 1999 |
|
RU2179775C2 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 2000 |
|
RU2161901C1 |
| ОСВЕТИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ЭНДОСКОПИЧЕСКОЙ ТЕХНИКИ | 1994 |
|
RU2082309C1 |
| ЭЛЕКТРОННОЕ РЕЛЕ С ТРАНСФОРМАТОРНОЙ РАЗВЯЗКОЙ И С ЗАЩИТОЙ ОТ ПЕРЕГРУЗКИ ПО ТОКУ | 2008 |
|
RU2360358C1 |
| Стабилизированный преобразователь постоянного напряжения с комбинированным управлением | 1986 |
|
SU1350654A1 |
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ С ИСПОЛНИТЕЛЬНЫМ УСТРОЙСТВОМ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 2012 |
|
RU2529544C2 |
| Устройство для контроля состояния распределенных объектов | 1985 |
|
SU1285509A1 |
| Система питания с защитой | 1986 |
|
SU1418677A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2840853C1 |
Изобретение относится к автоматике и импульсной технике и может быть использовано для управления электромагнитными механизмами постоянного тока, а именно поляризованными и нейтральными реле, муфтами, контакторами, пускателями и т.п., а также электромагнитами переменного тока со встроенными выпрямителями. Целью изобретения является повышение показателя экономичности. Сущность предложенных способа и устройства заключается в использовании для определения момента срабатывания электромагнита зависимости тока в обмотке от времени в период движения якоря, где минимум функции тока в этот период соответствует моменту срабатывания. 2 с.п. ф-лы, 2 ил.
Изобретение относится к автоматике и импульсной технике и может быть использовано для управления электромагнитными механизмами постоянного тока, а именно поляризованными и нейтральными реле, муфтами, контакторами, пускателями и т.п., а также электромагнитами переменного тока со встроенными выпрямителями.
Целью изобретения является повышение показателя экономичности.
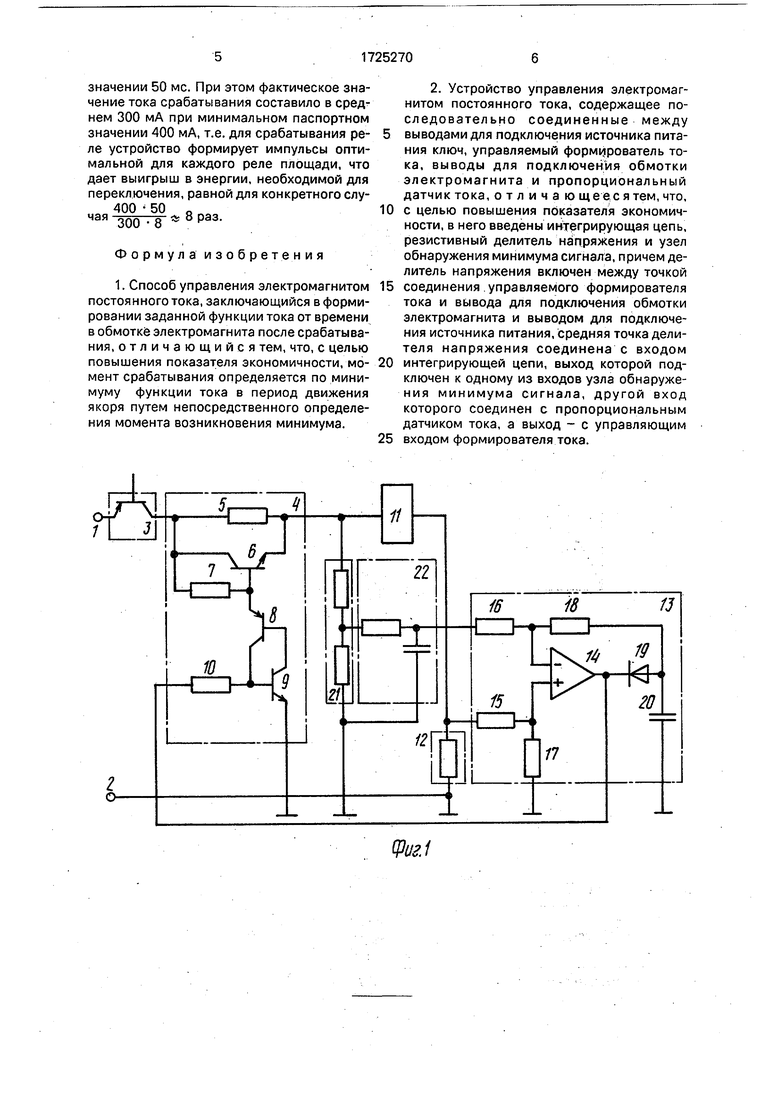
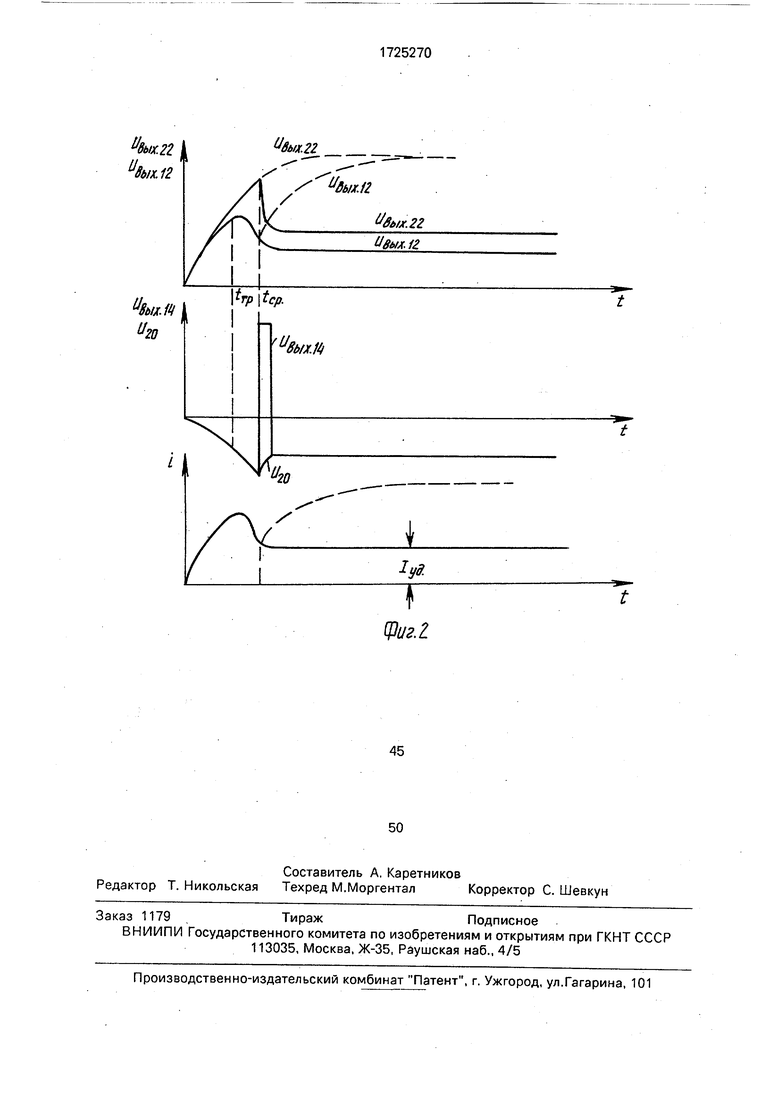
На фиг. 1 приведен пример функциональной схемы для случая формирования тока удержания после срабатывания электромагнита; на фиг. 2 - временные диаграммы, поясняющие работу.
Устройство управления электромагнитом постоянного тока содержит последовательно соединенные между выходами 1 и 2 источника питания ключ 3, например транзистор, управляемый формирователь 4 тока, например, резистор 5, формирующий ток удержания, параллельно которому включен п-р-п транзистор 6, база которого соединена с коллектором через резистор 7 и соединена с транзисторным аналогом тиристора, построенным на транзисторах 8 и 9 р-п-р и n-p-п типа соответственно, причем к базе транзистора подключен резистор 10, второй вывод которого является управляющим входом формирователя 4 тока, обмотку 11 электромагнита, пропорциональный датчик 12 тока, например, резистор, соединенный с первым выводом обмотки 11. Кроме того, устройство содержит схему 13 обнаружения минимума сигнала, в которой операционный усилитель (ОУ) 14 включен по схеме дифференциального усилителя, причем резисторы 15 и 16, имеющие одинаковое соVJ
ю ел го VJ
о
противление, соединены с неинвертирующими и инвертирующим входами ОУ 14 соответственно, а вторые их выводы являются первым и вторым входами схемы 13 соответственно. Резистор 17 включен между общей точкой и неинвертирующим входом ОУ 14. Резистор 18, равный по сопротивлению резистору 17, например, втрое больший, чем резистор 16, включен между инвертирующим входом ОУ 14 и анодом диода 19, катод которого соединен с выходом ОУ 14 и резистором 10.
Кроме того, анод диода 19 соединен через конденсатор 20 с общей точкой.
Второй вывод резистора 15 соединен с датчиком 12, а второй вывод резистора 16 соединен через последовательно включенные делитель 21 напряжения, например, ре- зистивный, и интегрирующую цепь 22, например RC, к второму выводу обмотки 11.
При этом постоянная времени интегрирующей цепи 22 должна быть равна наименьшей возможной постоянной времени обмотки 11 электромагнита, коэффициент деления делителя 21 должен быть равен максимально возможному отношению активного сопротивления обмотки 11 электромагнита и сопротивлению датчика 12.
Устройство работает следующим образом.
До замыкания ключа 3 устройство обесточено, напряжения на первом и втором входах схемы 13 равны нулю и, следовательно, напряжение на выходе, если его питание не связано с ключом 3, ОУ 14 тоже равно нулю. После замыкания ключа 3 по цепи: формирователь 4, обмотка 11, датчик 12 напряжения, начинает протекать ток.
Одновременно начинается заряд конденсатора интегрирующей цепи 22, причем напряжение на нем (Увых 22) при выполнении выше приведенных соотношений практически повторяет форму напряжения на датчике 12 (1)Вых 12) при несколько больших мгновенных значениях, до начала движения якоря т.тр (см. фиг. 2). При этом напряжение на выходе ОУ 14 отрицательно и удерживает в закрытом состоянии аналог тиристора на транзисторах 8 и 9, при этом транзистор 6 насыщен напряжением питания через резистор 7 и шунтирует резистор 5. Конденсатор 20 при этом перезаряжается выходным напряжением ОУ 14 через открытый диод 19 и напряжение на нем (U2o) повторяет форму напряжения на выходе ОУ 14. Этот процесс продолжается и после начала движения якоря (tnp), когда ток в обмотке и напряжение на датчике 12 начинают убывать, что приводит к еще большему перезаряду конденсатора 20. В момент tcp, когда якорь
прекращает движение, ток в обмотке и напряжение на датчике начинают возрастать, напряжение на выходе ОУ 14 тоже начинает возрастать, при этом закрывается диод 19,
так как на его аноде за счет заряда конденсатора 20 потенциал оказывается ниже, чем на аноде. Обратная связь разрывается. Напряжение на инвертирующем входе ОУ 14 в этот момент остается неизменным и равным
0 напряжению на неинвертирующем входе до момента tcp, а напряжение на неивертирую- щем входе продолжает возрастать. В этой ситуации ОУ 14 срабатывает, как компаратор, и напряжение на его выходе мгновенно
5 входит в состояние насыщения с положительным значением, которое открывает через резистор 10 аналог тиристора на транзисторах 8 и 9, который в свою очередь срабатывает и закрываеттранзистор 6, и ток
0 в обмотку электромагнита начинает поступать через резистор 5, ограничивающий его на уровне тока удержания уд. При этом, поскольку напряжение на неинвертирующем входе ОУ 14 падает, напряжение на его
5 выходе переходит в отрицательные значения, и в момент, когда напряжение на выходе ОУ 14 становится меньше напряжения на конденсаторе 20, обратная связь замыкается.
0 Таким образом, поскольку предложенный способ и устройство позволяют определить фактический момент срабатывания электромагнита и сформировать после этого оптимальный ток в обмотке, то это проис5 ходит значительно раньше, чем у прототипа, так как там заранее выставленный порог устанавливается всегда значительно выше максимального тока срабатывания для данного типа электромагнитов. Что для элект0 ромагнитов с высоким быстродействием дает экономию энергии, необходимую для переключения от 10 до 80%.
Особенно эффективно применение предложенных способа и устройства для уп5 равления поляризованными электромагнитами реле, когда оптимальной функцией тока в обмотке реле является его прерывание.
В этом случае величина минимально до0 пустимой длительности импульсов, используемых для управления, значительно выше (до десятка раз) фактического времени срабатывания конкретного реле. У используемых типов поляризованных реле,
5 управление которыми осуществлялось с помощью предложенных способа и устройства, выигрыш в показателе экономичности составил до 8 раз. Так, реальное время срабатывания реле составило в среднем 8 мс при минимальном допустимом паспортном
значении 50 мс. При этом фактическое значение тока срабатывания составило в среднем 300 мА при минимальном паспортном значении 400 мА, т.е. для срабатывания реле устройство формирует импульсы оптимальной для каждого реле площади, что дает выигрыш в энергии, необходимой для переключения, равной для конкретного слу400 50 0 чая 8 раз.
300-8
Формул а изобретения
0
5 0
5
%ых.22 i UВых. 12
Увых.22
ибых.12
i
.
U,
8ых.Н
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Розен В.З | |||
| Электромагнитные малогабаритные реле | |||
| Л.: Энергоатомиздат, 1986, с.246 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
