Предлагаемое изобретение относится к электротехнике и может быть использовано предпочтительно для управления электромагнитами (ЭМ) и контакторами.
Широко известны способы определения параметров срабатывания ЭМ, основанные на анализе переходного процесса изменения тока в его обмотке после подачи на нее напряжения питания (см., например, [1-6]). Определяемые с помощью различных технических решений параметры срабатывания ЭМ используются при построении различных систем автоматики, использующих в качестве исполнительных силовых устройств ЭМ. Так, например, сигнал, свидетельствующий о срабатывании ЭМ, применяется при диагностике срабатывания ЭМ [2-5]. Значение локального минимума тока в обмотке при срабатывании ЭМ используется, например, для определения положения якоря ЭМ [6]. Значение времени срабатывания ЭМ востребовано при построении автоматических устройств регулирования времени срабатывания ЭМ [7], управления электромагнитным клапаном (ЭМК) [8] или регуляторов давления [9], использующих ЭМК в качестве регулирующих элементов.
Таким образом, разработка технических решений, позволяющих с хорошей помехозащищенностью и точностью определять параметры срабатывания ЭМ, является важной и актуальной задачей.
Наиболее близким к заявляемому техническим решением является принятое за прототип изобретение, описанное в материалах патента [10]. Здесь формирование сигнала, свидетельствующего о перемещении якоря при срабатывании ЭМ на требуемую величину, осуществляется на основании автоматического анализа переходного процесса изменения тока в обмотке ЭМ после подачи на нее напряжения питания.
Заключение о том, что при срабатывании гарантированно произошло перемещение якоря ЭМ на требуемую величину, делается на основании сравнения сдвинутого вверх по уровню сигнала, соответствующего изменению тока в обмотке ЭМ, и сигнала, соответствующего локальному максимуму тока в обмотке ЭМ. Если наступает момент, когда эти сигналы совпадают, то считается, что произошло срабатывание ЭМ, и перемещение его якоря при этом соответствует норме. В этот момент времени формируется сигнал, свидетельствующий о срабатывании ЭМ.
Предопределенное пороговое значение, на которое сдвигается вверх по уровню сигнал, соответствующий изменению тока в обмотке ЭМ, устанавливается как абсолютная величина разности между локальным максимумом и локальным минимумом тока в обмотке ЭМ, которые ток достигает при срабатывании. Отмечается также, что предопределенное пороговое значение может быть определено посредством измерения характеристик ЭМ.
Следует отметить, что процесс изменения тока в обмотке ЭМ (в частности, величины локального максимума и локального минимума при срабатывании и моменты времени их достижения) существенно зависит от многих факторов, например, таких как напряжение питания, нагрузка, действующая на якорь, и начальное значение зазора между якорем и стопом ЭМ. Все эти факторы в процессе эксплуатации ЭМ могут существенно меняться. И, если это не учитывать, предложенное в описании [10] техническое решение может оказаться неработоспособным.
Задачей предлагаемого изобретения является расширение функциональных возможностей и повышение помехозащищенности способа получения параметров срабатывания ЭМ.
Решение поставленной задачи достигается тем, что для определения момента срабатывания ЭМ формируют измерительный интервал, начало которого устанавливают после достижения локального максимума сигналом, соответствующим величине тока в обмотке ЭМ, и гарантированно до момента достижения этим сигналом локального минимума в любых допустимых условиях эксплуатации ЭМ, а окончание измерительного интервала устанавливают после достижения локального минимума сигналом, соответствующим величине тока в обмотке ЭМ, с задержкой, достаточной для сохранения величины измеренного локального минимума. Причем, формирование сигнала, свидетельствующего о срабатывании ЭМ, осуществляют в момент достижения локального минимума, который фиксируют, когда на измерительном интервале падение уровня сигнала, соответствующего величине тока в обмотке ЭМ, сменяется его нарастанием, а величину локального минимума сохраняют до окончания измерительного интервала. При снятии напряжения питания с обмотки ЭМ сигнал, свидетельствующий о срабатывании ЭМ, обнуляют.
При решении поставленной задачи возможен вариант, когда начало и окончание измерительного интервала формируют в результате сравнения сигнала, соответствующего величине тока в обмотке ЭМ, и его преобразованного инерционным звеном значения, причем начало измерительного интервала формируют в момент времени, когда величина преобразованного инерционным звеном значения сигнала начинает превышать величину самого сигнала, соответствующего величине тока в обмотке ЭМ, после чего окончание измерительного интервала формируют в момент времени, когда после достижения локального минимума величина самого сигнала, соответствующего величине тока в обмотке ЭМ, станет выше значения сигнала, преобразованного инерционным звеном. Величину постоянной времени инерционного звена выбирают экспериментально или расчетными методами таким образом, чтобы начало измерительного интервала наступало по времени гарантированно раньше, чем момент достижения сигналом, соответствующим величине тока в обмотке ЭМ, локального минимума при срабатывании в любых допустимых условиях эксплуатации ЭМ и окончание измерительного интервала отстояло по времени от момента достижения локального минимума сигнала, соответствующего величине тока в обмотке ЭМ, на отрезок времени, достаточный для сохранения величины локального минимума.
Для измерения значения времени срабатывания электромагнита формируют интервал времени, длительность которого определяют от момента подачи напряжения питания на обмотку ЭМ до момента достижения локального минимума сигналом, соответствующим величине тока в обмотке ЭМ.
В устройство для определения параметров срабатывания ЭМ для решения задачи предлагаемого изобретения введены формирователь измерительного интервала, на вход которого поступает сигнал, соответствующий величине тока в обмотке ЭМ, и формирователь времени срабатывания с двумя входами и двумя выходами, а пиковый детектор снабжен вторым входом и вторым выходом. Причем выход сумматора соединен с прямым входом компаратора, с инверсным входом которого соединен первый выход пикового детектора, который является первым выходом устройства. Второй выход пикового детектора соединен с входом сумматора, а выход формирователя измерительного интервала соединен с вторым входом пикового детектора. Выход компаратора соединен с первым входом формирователя времени срабатывания, на второй вход которого поступает командный сигнал подачи напряжения питания на обмотку электромагнита. Первый и второй выходы формирователя времени срабатывания являются соответственно вторым и третьим выходами устройства.
При этом формирователь измерительного интервала может быть выполнен следующим образом. Он содержит компаратор, три резистора и конденсатор, причем первые выводы первого и второго резисторов соединены между собой и являются входом формирователя измерительного интервала, второй вывод первого резистора соединен с прямым входом компаратора и первым выводом третьего резистора, второй вывод которого соединен с положительным выводом источника питания, второй вывод второго резистора соединен с инверсным входом компаратора и первым выводом конденсатора, второй вывод которого соединен с отрицательным выводом источника питания, при этом выход компаратора является выходом формирователя измерительного интервала.
Возможное исполнение формирователя времени срабатывания содержит два D-триггера, инвертор, два резистора, два диода и конденсатор. Причем первый вход формирователя времени срабатывания соединен с тактовым входом первого D-триггера. Вход сброса первого D-триггера соединен с выходом инвертора, вход которого соединен с вторым входом формирователя времени срабатывания, который соединен также с тактовым входом второго D-триггера, вход сброса которого соединен с катодами первого и второго диодов и первым выводом второго резистора. Анод первого диода соединен с первым выводом первого резистора и первым выводом конденсатора, второй вывод которого соединен с положительным выводом источника питания. Анод второго диода соединен с прямым выходом первого D-триггера, который одновременно является первым выходом формирователя времени срабатывания, причем, входы данных первого и второго D-триггера соединены и с положительным выводом источника питания, а их установочные входы соединены с отрицательным выводом источника питания, с которым соединены также вторые выводы обоих резисторов. А прямой выход второго D-триггера является вторым выходом формирователя времени срабатывания.
При этом в пиковый детектор дополнительно введен управляемый ключ, управляющий вход которого является вторым входом пикового детектора, первый вывод управляемого ключа соединен с выходом операционного усилителя, катодом диода и вторым выходом пикового детектора, а анод диода соединен с первым выводом конденсатора, вторым выводом управляемого ключа и первым выходом пикового детектора.
Сущность предлагаемого технического решения поясняется чертежами.
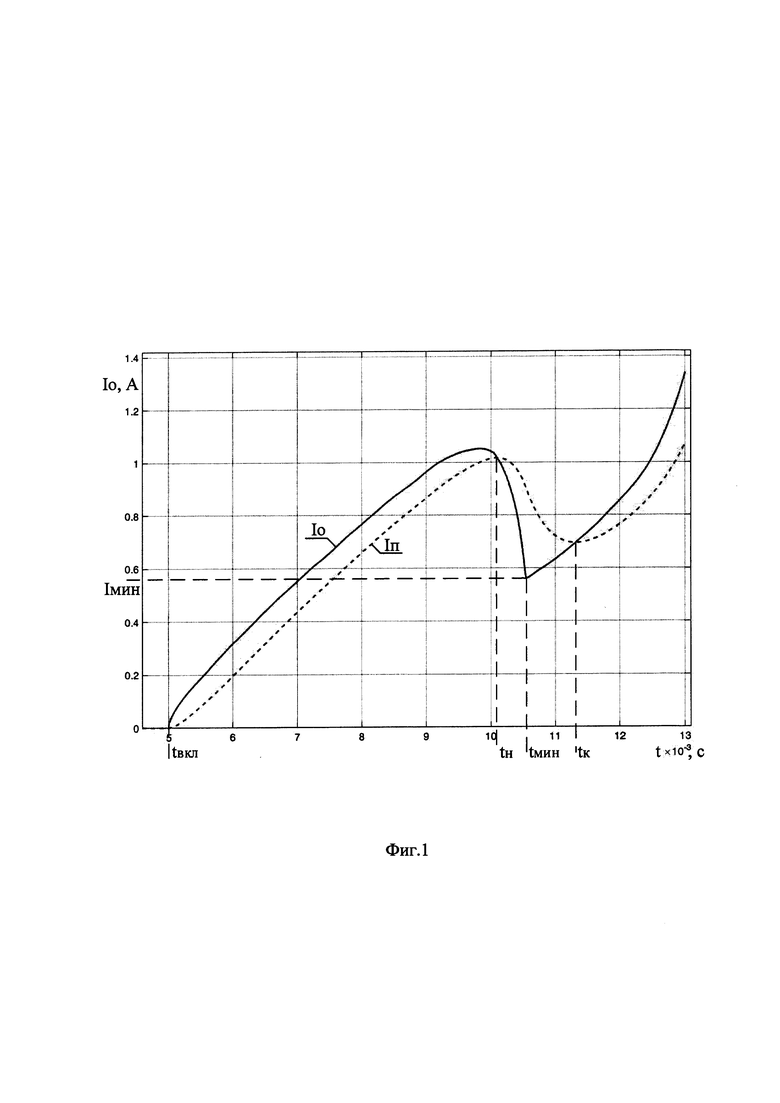
Фиг. 1. Результаты компьютерного моделирования работы ЭМ при срабатывании.
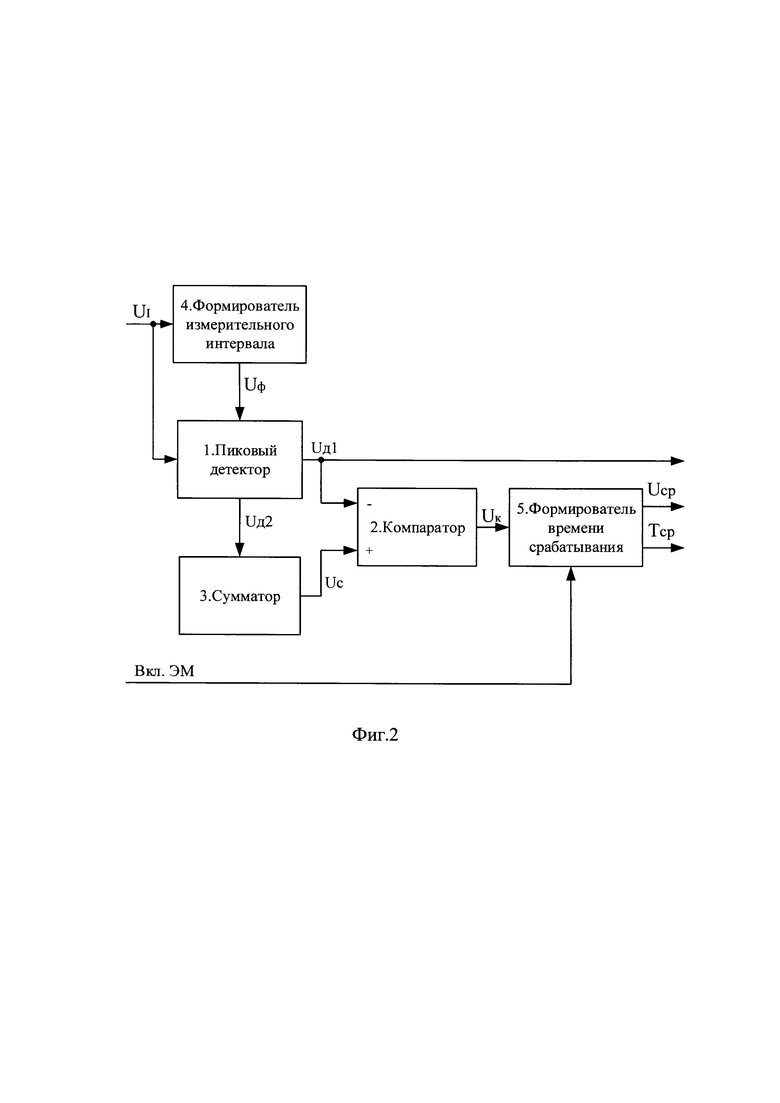
Фиг. 2. Функциональная схема устройства для определения параметров срабатывания ЭМ.
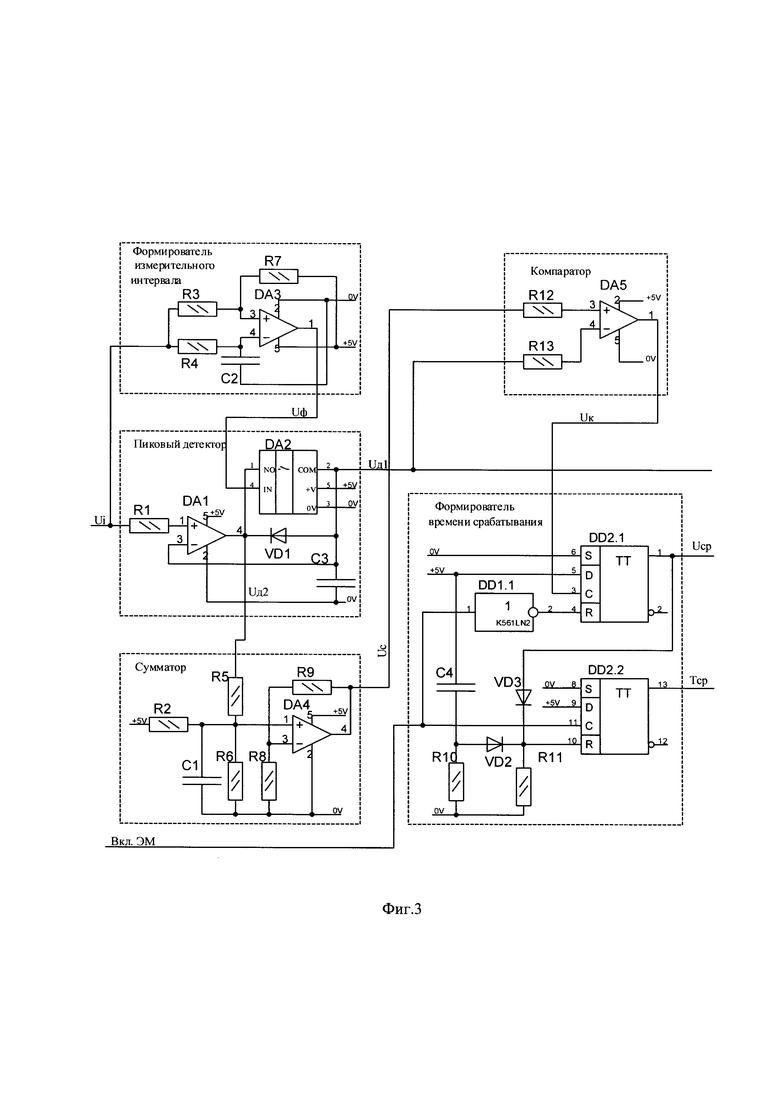
Фиг. 3. Электрическая принципиальная схема устройства для определения параметров срабатывания ЭМ.
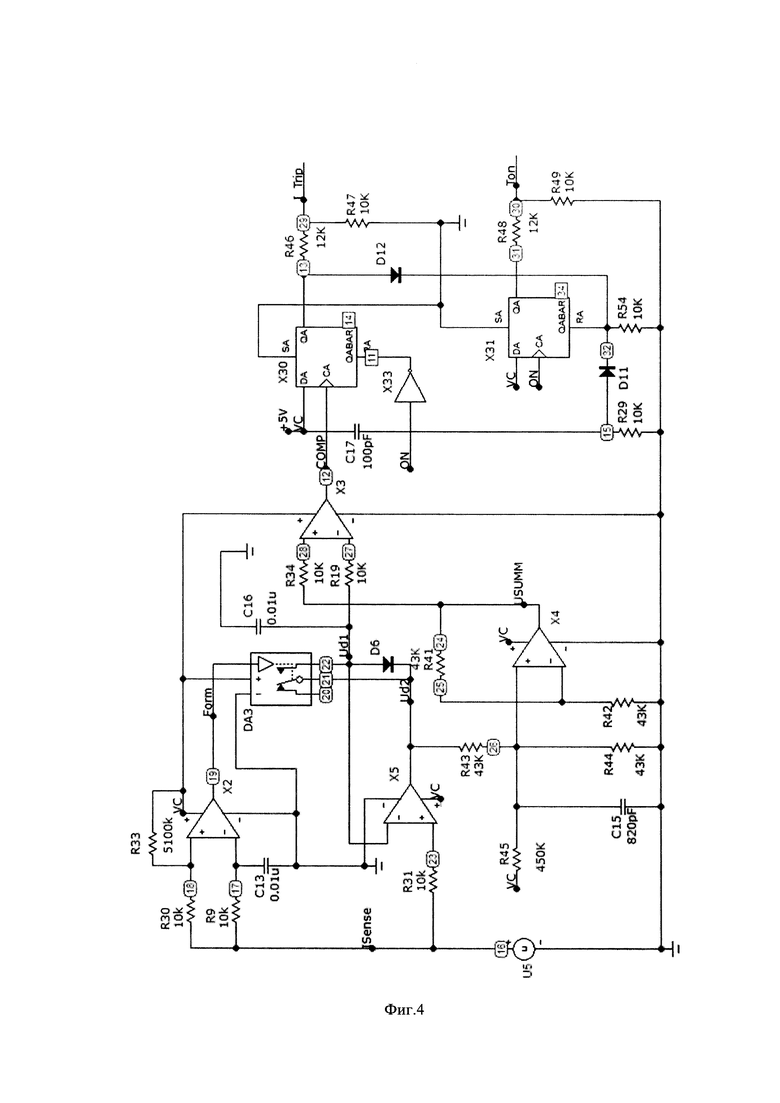
Фиг. 4. Схема компьютерного моделирования работы устройства для определения параметров срабатывания ЭМ, электрическая принципиальная схема которого приведена на фиг. 3.
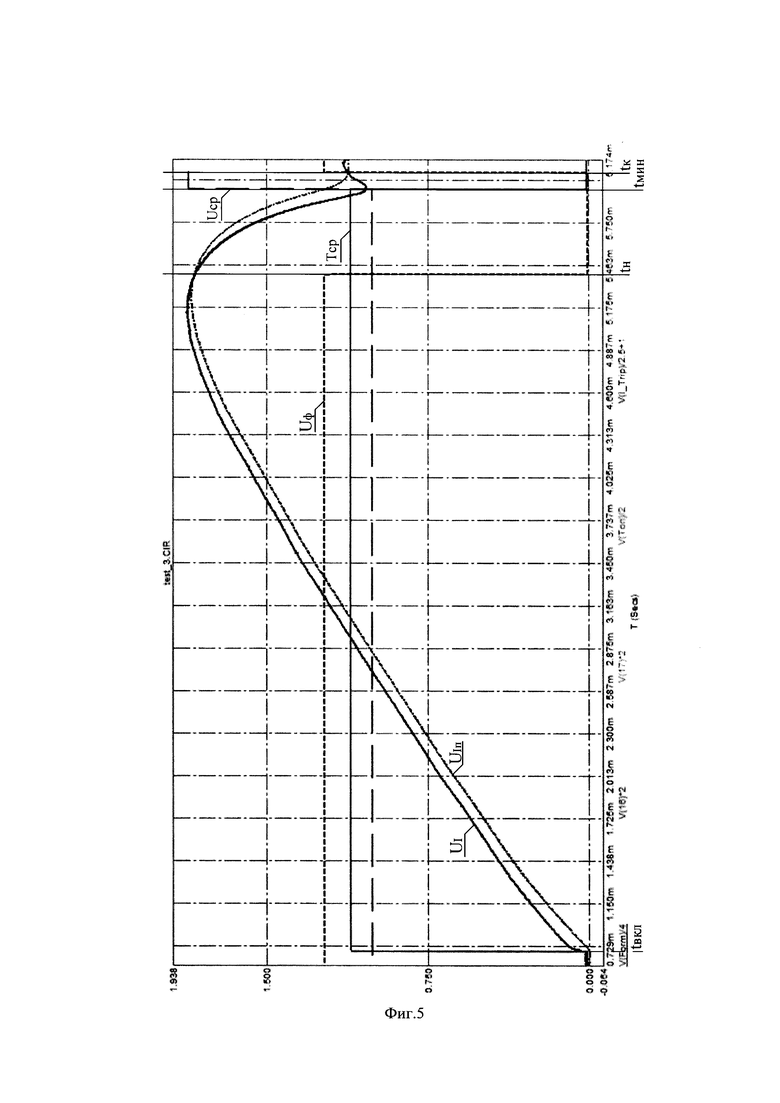
Фиг. 5. Результаты компьютерного моделирования работы предлагаемого устройства с использованием схемы, представленной на фиг. 4.
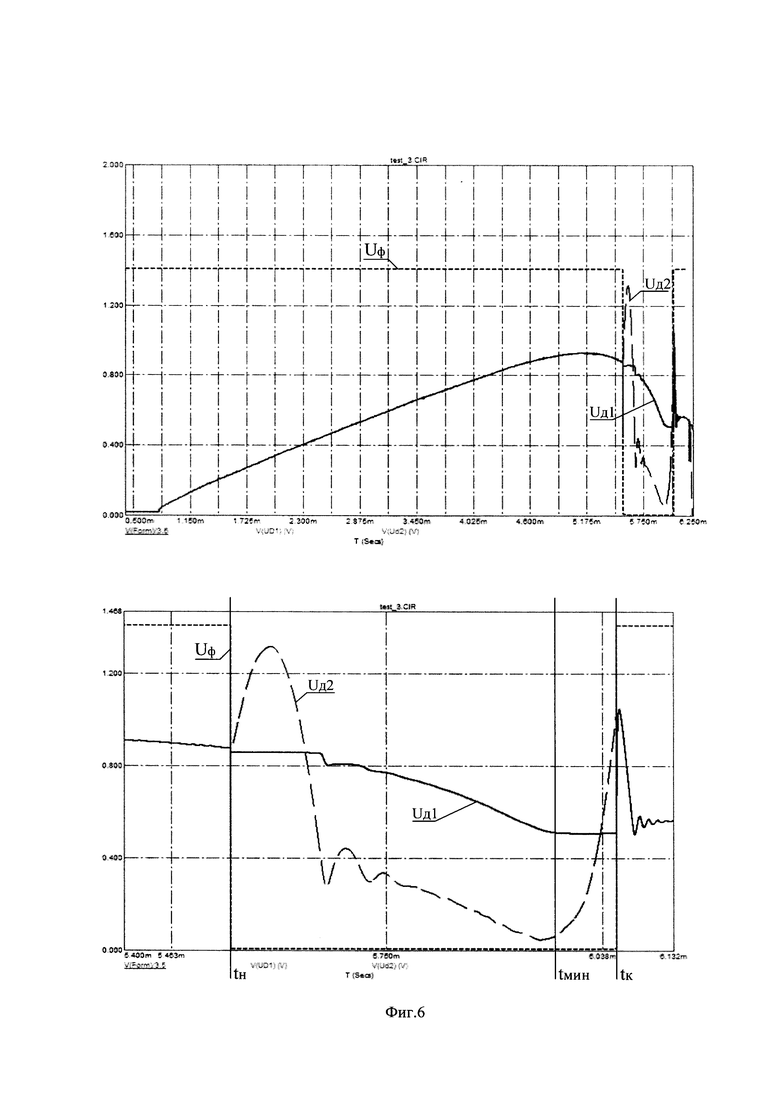
Фиг. 6. Результаты компьютерного моделирования работы формирователя измерительного интервала и пикового детектора.
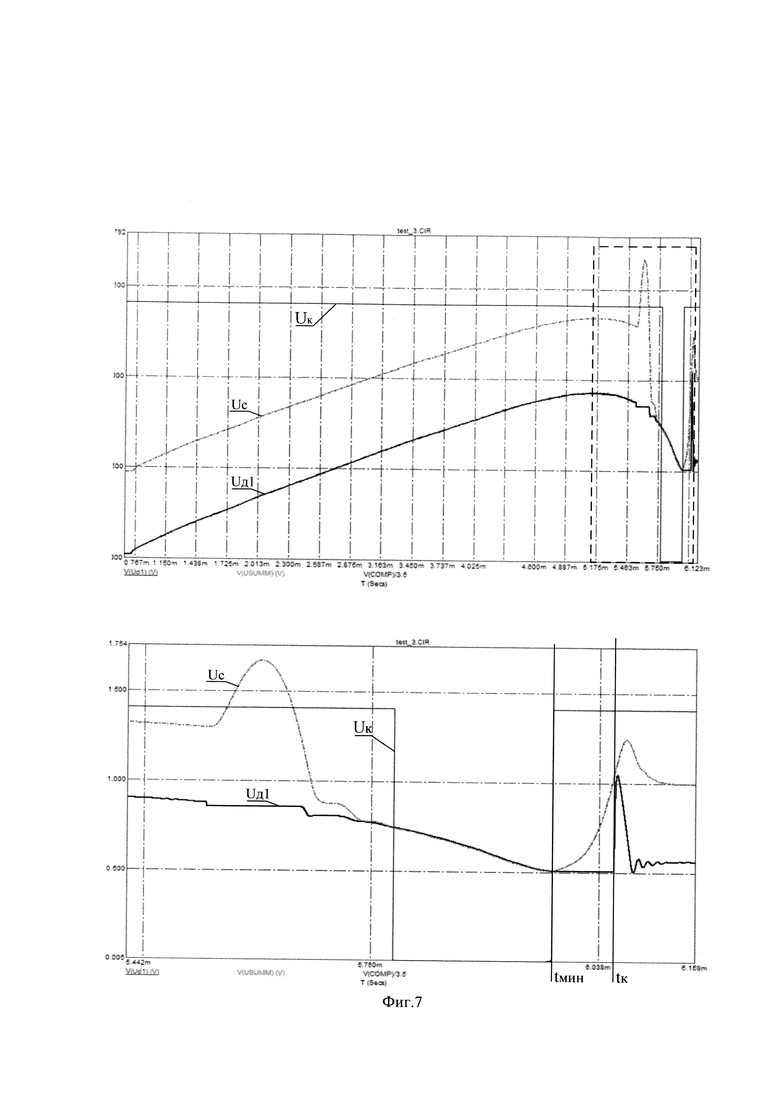
Фиг. 7. Результаты компьютерного моделирования работы пикового детектора, сумматора и компаратора.
Предлагаемый способ определения параметров срабатывания ЭМ основан на анализе переходного процесса изменения тока в его обмотке после подачи на нее напряжения питания. Способ включает мониторинг локального максимума и локального минимума тока в обмотке ЭМ при срабатывании и формирование сигнала, свидетельствующего о его срабатывании. Характер изменения тока в обмотке ЭМ Iо при срабатывании показан на фиг. 1. Этот переходный процесс получен в результате компьютерного моделирования работы ЭМ при срабатывании, но он очень хорошо отражает соответствующие экспериментальные данные.
Для определения момента срабатывания ЭМ формируют измерительный интервал, начало которого устанавливают после достижения локального максимума сигналом, соответствующим величине тока в обмотке ЭМ, и гарантированно до момента достижения этим сигналом локального минимума в любых допустимых условиях эксплуатации ЭМ. Использование термина «сигнал, соответствующий величине тока в обмотке электромагнита,» вызвано тем, что величину тока в обмотке ЭМ обычно оценивают по значению падения напряжения на измерительном резисторе, включенном в цепь питания обмотки ЭМ. Окончание измерительного интервала устанавливают после достижения локального минимума сигналом, соответствующим величине тока в обмотке ЭМ, с задержкой, достаточной для сохранения величины измеренного локального минимума тока в обмотке I мин (см. фиг. 1).
Начало и окончание измерительного интервала формируют (см. графики на фиг. 1) в результате сравнения сигнала Iо и его преобразованного инерционным звеном значения Iп. Причем, начало измерительного интервала формируют в момент времени, когда величина преобразованного инерционным звеном значения сигнала Iп начинает превышать величину самого сигнала Iо (момент времени tн). А окончание измерительного интервала формируют в момент времени tк, когда после достижения локального минимума тока в обмотке ЭМ Iмин в момент времени tмин величина самого сигнала Iо станет выше значения сигнала Iп, преобразованного инерционным звеном.
При этом величину постоянной времени инерционного звена выбирают экспериментально или расчетными методами таким образом, чтобы начало измерительного интервала наступало по времени гарантированно раньше, чем момент достижения сигналом Iо локального минимума при срабатывании в любых допустимых условиях эксплуатации ЭМ, а окончание измерительного интервала отстояло по времени от момента достижения локального минимума сигнала Iо на отрезок времени tк - tмин, достаточный для сохранения величины локального минимума Iмин.
Для измерения значения времени срабатывания ЭМ формируют интервал времени Тср, длительность которого определяют от момента подачи напряжения питания на обмотку ЭМ tвкл (см. фиг. 1) до момента tмин достижения локального минимума Iмин сигналом Iо.
Формирование сигнала, свидетельствующего о срабатывании ЭМ, осуществляют (см. графики на фиг. 1) в момент времени tмин достижения локального минимума Iмин, который фиксируют, когда на измерительном интервале падение уровня сигнала Iо сменяется его нарастанием. А величину локального минимума Iмин сохраняют до окончания измерительного интервала от момента времени tмин до момента времени tк. При снятии напряжения питания с обмотки ЭМ сигнал, свидетельствующий о срабатывании ЭМ, обнуляют, что позволяет подготовиться к началу следующего рабочего цикла ЭМ. Тот факт, что формирование всех выходных сигналов осуществляется на измерительном интервале, исключает влияние любых помех, действующих вне измерительного интервала, на значения формируемых выходных параметров.
Для осуществления предлагаемого способа определения параметров срабатывания ЭМ было разработано устройство, функциональная схема которого приведена на фиг. 2, а электрическая принципиальная схема - на фиг. 3.
Разработанное устройство для определения параметров срабатывания ЭМ позволяет формировать сигнал Ucp, свидетельствующий о срабатывании ЭМ и определять такие параметры срабатывания ЭМ, как время срабатывания Tср и величину локального минимума сигнала, соответствующего величине тока в обмотке ЭМ, при срабатывании Iмин. На входы устройства должны подаваться сигнал, соответствующий величине тока в обмотке ЭМ, и командный сигнал управления ЭМ, определяющий интервал времени, в течение которого обмотка ЭМ находится под напряжением питания.
Устройство содержит (см. функциональную схему на фиг. 2) пиковый детектор (1), на вход которого поступает сигнал UI, соответствующий величине тока в обмотке ЭМ, компаратор (2), сумматор (3), формирователь измерительного интервала (4), на вход которого поступает сигнал, соответствующий величине тока в обмотке ЭМ, и формирователь времени срабатывания (5) с двумя входами и двумя выходами. Пиковый детектор (1) снабжен вторым входом и вторым выходом. Причем выход сумматора (3) соединен с прямым входом компаратора (2), с инверсным входом которого соединен первый выход пикового детектора (1), который является первым выходом устройства, на котором формируется сигнал, соответствующий величине локального минимума тока в обмотке в момент его достижения. Этот сигнал сохраняет свое значение до окончания измерительного интервала. Второй выход пикового детектора (1) соединен с входом сумматора (3). Выход формирователя измерительного интервала (4) соединен с вторым входом пикового детектора (1). Выход компаратора (2) соединен с первым входом формирователя времени срабатывания (5), на второй вход которого поступает командный сигнал подачи напряжения питания на обмотку «вкл. ЭМ». Первый и второй выходы формирователя времени срабатывания (5) являются соответственно вторым и третьим выходами устройства, на которых формируются сигнал Ucp, свидетельствующий о срабатывании ЭМ, и сигнал Тср, длительность которого соответствует величине времени срабатывания ЭМ. Все выходные сигналы устройства могут использоваться, как уже отмечалось, в качестве входных информационных сообщений для различных систем управления работой ЭМ.
Работает устройство следующим образом (см. функциональную схему на фиг. 2). Сигнал UI, соответствующий величине тока в обмотке ЭМ, поступает одновременно на входы формирователя измерительного интервала (4) и пикового детектора (1). Формирователь измерительного интервала (4) формирует сигнал Uф, управляющий режимом работы пикового детектора (1). На измерительном интервале [tн, tк] активный уровень сигнала Uф - низкий.
Сигнал Uф поступает на второй управляющий вход пикового детектора (1), который работает в режиме слежения (т.е. повторителя) при сигнале «логическая 1» на этом его входе. При поступлении на второй вход пикового детектора (1) сигнала «логический 0», он переходит в режим поиска минимума сигнала, поступающего на первый вход пикового детектора (1). Сигнал Uд1 на первом выходе пикового детектора (1), начиная с момента достижения сигналом UI локального минимума и до окончания измерительного интервала, будет сохранять значение величины локального минимума.
Сигнал Uд2 со второго выхода пикового детектора (1) поступает на вход сумматора (3), где складывается с сигналом постоянного уровня, компенсирующим падение напряжения на диоде пикового детектора. Выходной сигнал Uc сумматора (3) поступает на неинвертирующий вход компаратора (2), где сравнивается с сигналом Uд1, поступающим на инвертирующий вход компаратора (2) с первого выхода пикового детектора (1). После достижения сигналом UI локального минимума разность между сигналами Uд1 и Uc изменяет знак, что приводит к срабатыванию компаратора (2) и появлению на его выходе положительного перепада напряжения в сигнале Uк.
Формирователь времени срабатывания (5) при поступлении на его второй вход сигнала «Вкл. ЭМ» устанавливает сигнал уровня «логическая 1» на его втором выходе Тср. Это состояние на втором выходе формирователя времени срабатывания (5) будет сохраняться до появления на его первом входе положительного перепада напряжения в сигнале Uк. Сигнал Uк, поступая на первый вход формирователя времени срабатывания (5), устанавливает его первом выходе сигнал Uср в состояние «логическая 1» и сбрасывает в состояние «логический 0» сигнал Тср на его втором выходе. Появление положительного перепада напряжения сигнала Uср на первом выходе формирователя времени срабатывания (5) соответствует моменту достижения сигналом UI локального минимума, что совпадает с окончанием движения якоря ЭМ. А длительность пребывания сигнала Tcр в состоянии «логическая 1» на втором выходе формирователя времени срабатывания (5) соответствует времени срабатывания ЭМ.
Формирователь измерительного интервала (4) содержит (см. электрическую принципиальную схему устройства на фиг. 3) компаратор DA3, три резистора R3, R4 и R7 и конденсатор С2. Первые выводы первого и второго резисторов R3 и R4 соединены между собой и являются входом формирователя измерительного интервала (4). Второй вывод первого резистора R3 соединен с прямым входом компаратора DA3 и первым выводом третьего резистора R7, второй вывод которого соединен с положительным выводом источника питания. Второй вывод второго резистора R4 соединен с инверсным входом компаратора DA3 и первым выводом конденсатора С2, второй вывод которого соединен с отрицательным выводом источника питания. Выход компаратора DA3 является выходом формирователя измерительного интервала (4).
Формирователь измерительного интервала (4) выполнен на компараторе DA3. Для установки на его выходе сигнала, соответствующего начальному состоянию - «логическая 1», на неинвертирующий вход компаратора DA3 через резистор R7 подается смещение. На этот же вход через резистор R3 подается сигнал UI, соответствующий величине тока в обмотке ЭМ. Этот же сигнал задержанный RC цепью R4 С2 поступает на инвертирующий вход компаратора DA3. В результате сравнения сигналов на двух входах компаратора DA3 в момент времени, когда сигнал на инвертирующем входе начинает превышать по уровню сигнал на неинвертирующем входе, на выходе компаратора DA3 формируется сигнал с уровнем «логический 0», который будет сохраняться в течение всего измерительного интервала (пока уровень сигнала на инвертирующем входе будет выше уровня сигнала на неинвертирующем входе компаратора DA3). Выходной сигнал Uф формирователя измерительного интервала (4) поступает на второй управляющий вход пикового детектора (1), задавая временной интервал поиска локального минимума входного сигнала устройства UI.
Пиковый детектор (1) содержит (см. фиг. 3) резистор R1, операционный усилитель DA1, конденсатор С3, диод VD1 и управляемый ключ DA2, управляющий вход которого является вторым входом пикового детектора (1). Первый вывод резистора R1 соединен с прямым входом операционного усилителя DA1, инверсный вход которого соединен с первым выводом конденсатора С3, второй вывод которого соединен с отрицательным выводом источника питания. Второй вывод резистора R1 является первым входом пикового детектора (1). Первый вывод управляемого ключа DA2 соединен с выходом операционного усилителя DA1, катодом диода VD1 и вторым выходом пикового детектора (1). Анод диода соединен с первым выводом конденсатора С3, вторым выводом управляемого ключа DA2 и первым выходом пикового детектора (1).
Пиковый детектор (1) работает как детектор минимального значения входного сигнала при разомкнутом управляемом ключе DA2. В качестве такого ключа может быть использована, например, микросхема TS5A3166DBVR [11]. При сигнале уровня «логическая 1» на управляющем входе ключа DA2 он замыкается, переводя пиковый детектор (1) в режим слежения (повторителя). Напряжение Uд2 на втором выходе пикового детектора (1) вне измерительного интервала равно напряжению Uд1 на первом выходе пикового детектора (1). На измерительном интервале ключ DA2 размыкается. При этом напряжение Uд2 будет равно разности напряжения Uд1 и падения напряжения на диоде VD1 UVD1:
Uд2=Uд1-UVD1.
Напряжение Uд2 со второго выхода пикового детектора (1) поступает на вход сумматора (3), где складывается с постоянным напряжением, компенсирующим падение напряжения на диоде VD1. Выходное напряжение сумматора Uc поступает (см. фиг. 3) на неинвертирующий вход компаратора DA5, где сравнивается с напряжением Uд1, поступающим на его инвертирующий вход с первого выхода пикового детектора (1). При достижении локального минимума сигнала UI диод VD1 закрывается, вызывая резкий рост напряжения UVD1, приводящий к срабатыванию компаратора DA5, на выходе которого устанавливается сигнал Uк уровня «логическая 1». С этого момента напряжение на выходе Uд1 сохраняется на уровне локального минимума сигнала UI до окончания измерительного интервала. По окончании измерительного интервала пиковый детектор (1) снова переходит в режим слежения.
Формирователь времени срабатывания (5) содержит два D-триггера DD2.1 и DD2.2, инвертор DD1.1, два резистора R10 и R11, два диода VD2 и VD3 и конденсатор С4. Первый вход формирователя времени срабатывания (5) соединен с тактовым входом (С) первого D-триггера DD2.1. Вход сброса (R) первого D-триггера DD2.1 соединен с выходом инвертора DD1.1, вход которого соединен с вторым входом формирователя времени срабатывания (5), который соединен также с тактовым входом (С) второго D-триггера DD2.2, вход сброса (R) которого соединен с катодами первого и второго диодов VD2 и VD3 и первым выводом второго резистора R11. Анод первого диода VD2 соединен с первым выводом первого резистора R10 и первым выводом конденсатора С4, второй вывод которого соединен с положительным выводом источника питания. Анод второго диода VD3 соединен с прямым выходом первого D-триггера DD2.1, который одновременно является первым выходом формирователя времени срабатывания (5). Входы данных (D) первого и второго D-триггеров DD2.1 и DD2.2 соединены и с положительным выводом источника питания, а их установочные входы (S) соединены с отрицательным выводом источника питания, с которым соединены также вторые выводы обоих резисторов R10 и R11. А прямой выход второго D-триггера DD2.2 является вторым выходом формирователя времени срабатывания (5).
Формирователь времени срабатывания (5) получает на второй вход командный сигнал «Вкл. ЭМ» от системы управления ЭМ. На вход сброса (R) триггера DD2.1 этот сигнал поступает после преобразования инвертором DD1.1, и при выключении ЭМ устанавливает прямой выход первого D-триггера DD2.1 в состояние «логический 0». При включении ЭМ по этому сигналу снимается сигнал сброса с первого D-триггера DD2.1 и записывается «логическая 1» на прямом выходе второго D-триггера DD2.2, формируя начало интервала, равного времени срабатывания Тср.
Выходной сигнал Uк с выхода компаратора (2) подается на первый вход формирователя времени срабатывания (5). Когда в момент достижения локального минимума сигнала UI сигнал Uк приобретает уровень «логическая 1», он, воздействуя на тактовый вход (С) первого D-триггера DD2.1, формирует сигнал уровня «логическая 1» на его прямом выходе. Этот момент времени соответствует окончанию движения подвижных частей ЭМ, т.е. его срабатыванию. Таким образом, появление на прямом выходе первого D-триггера DD2.1, одновременно являющимся первым выходом формирователя времени срабатывания (5), сигнала Ucp уровня «логическая 1» свидетельствует о срабатывании ЭМ. Сигнал с прямого выхода первого D-триггера DD2.1 через вход схемы «ИЛИ», образованной элементами VD2, VD3, и R11 поступает на вход сброса (R) второго D-триггера DD2.2, сбрасывая его прямой выход в состояние «логический 0». При этом заканчивается формирование интервала, равного времени срабатывания ЭМ, и сигнал Тср обнуляется.
Элементы С4 и R10 образуют схему установки начального состояния второго D-триггера DD2.2, которой при подаче напряжения питания на устройство формируется сигнал начальной установки и через диод VD2, являющийся элементом схемы «ИЛИ», поступает на вход сброса (R) второго D-триггера DD2.2, сбрасывая его выход в состояние «логический 0».
Для подтверждения работоспособности заявляемого технического решения было выполнено компьютерное моделирование работы электрической принципиальной схемы возможного исполнения устройства, реализующего предлагаемый способ. При этом использовался программный пакет Micro-Cap (Microcomputer Circuit Analysis Program) для компьютерного моделирования аналоговых и цифровых электронных устройств [12]. Была разработана схема для компьютерного моделирования предлагаемого устройства, приведенная на фиг. 4, которая выполнена с использованием 12 версии [13] программы схемотехнического моделирования Micro-Cap.Эта схема разработана на основе электрической принципиальной схемы устройства для определения параметров срабатывания ЭМ, приведенной на фиг. 3.
На фиг. 5 приведены результаты компьютерного моделирования работы предлагаемого устройства с использованием схемы, представленной на фиг. 4. На фиг. 5 представлены переходные процессы изменения основных сигналов, позволяющие оценить логику функционирования предлагаемого устройства. Здесь показаны: входной сигнал UI, соответствующий величине тока в обмотке ЭМ; сигнал UIп, который получен в результате преобразования инерционным звеном входного сигнала UI; сигнал Uф - выходной сигнал формирователя измерительного интервала; сдвинутый по уровню (для избегания наложения на другие) сигнал Ucp, формируемый на втором выходе устройства; сигнал Тср - формируемый на третьем выходе устройства импульс, длительность которого соответствует времени срабатывания ЭМ. Здесь же отмечены отражающие логику работы устройства основные моменты времени: tвкл - момент включения ЭМ (подача напряжения питания на обмотку); tн - начало измерительного интервала; tк - конец измерительного интервала; tмин - момент достижения локального минимума сигналом UI, соответствующий величине тока в обмотке ЭМ. В качестве входного сигнала UI использована запись реального сигнала изменения тока в обмотке ЭМ, полученная экспериментально при испытаниях.
Результаты компьютерного моделирования работы формирователя измерительного интервала и пикового детектора показаны на фиг. 6. Здесь представлены переходные процессы изменения выходного сигнала формирователя измерительного интервала Uф и двух выходных сигналов пикового детектора Uд1 и Uд2. На графике в увеличенном масштабе, приведенном в нижней части фиг. 6, отмечены также характерные моменты времени: tн - начало измерительного интервала, tк - конец измерительного интервала и tмин - момент достижения локального минимума сигналом UI.
На фиг. 7 приведены результаты компьютерного моделирования работы пикового детектора, сумматора и компаратора. Здесь показаны переходные процессы изменения выходного сигнала компаратора Uк, выходного сигнала сумматора Uc и формируемого на первом выходе пикового детектора сигнала Uд1, который поступает на первый выход устройства. На графике в увеличенном масштабе, приведенном в нижней части фиг. 7, отмечены tмин - момент достижения локального минимума сигналом UI и момент времени tк - конец измерительного интервала. На нижнем графике четко видно, что величина сигнала Uд1, соответствующая значению локального минимума сигнала UI, сохраняется на отрезке времени от tмин до tк.
Приведенные результаты компьютерного моделирования убедительно подтверждают работоспособность и эффективность предлагаемого технического решения и позволяют рекомендовать его к использованию при построении различных систем автоматического управления ЭМ.
1. СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СРАБАТЫВАНИЯ ДВУХОБМОТОЧНОГО ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. SU 1840227 А1. Опубликовано: 20.08.2006. Бюл. №23.
2. УСТРОЙСТВО И СПОСОБ ДИАГНОСТИКИ СОЛЕНОИДНЫХ КЛАПАНОВ. RU 2768368 С2. Опубликовано: 24.03.2022 Бюл. №9.
3. DETECTION OF PLUNGER MOVEMENT IN DC SOLENOIDS THROUGH CURRENT SENSE TECHNIQUE. Patent No.: US 10,317,453 B2. Date of Patent: Jim. 11, 2019.
4. DIAGNOSTIC DEVICE AND METHOD FOR SOLENOID VALVES. Patent No.: US 11,322,283 B2. Date of Patent: May 3, 2022.
5. DIAGNOSTIC DEVICE AND METHOD FOR SOLENOID VALVES. Patent No.: US 11,569,017 B2. Date of Patent: Jan 31, 2023.
6. DETERMINE SOLENOID PLUNGER POSITION OF A CURRENT CONTROLLED SOLENOID USING POSITION FEEDBACK. Pub. No.: US 2021/0134502 A1. Pub. Date: May 6, 2021.
7. СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. RU 2773298 С1. Опубликовано: 01.06.2022. Бюл. №16.
8. СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ. RU 2783869 С1. Опубликовано: 21.11.2022. Бюл. №33.
9. РЕГУЛЯТОР ДАВЛЕНИЯ. RU 2773680 С2. Опубликовано: 07.06.2022. Бюл. №16.
10. DETECTION OF PLUNGER MOVEMENT IN DC SOLENOIDS THROUGH CURRENT SENSE TECHNIQUE. US 10895608 B2. Date of Patent: Jan 31, 2021.
11. TS5A3166DBVR. [Электронный ресурс] https.7/static.chipdip.ru/lib/726/DOC018726061.pdf (дата обращения 10.01.2024).
12. Амелина M.A., Амелин С.А. Программа схемотехнического моделирования Micro-Cap.Версии 9, 10. - Смоленск, Смоленский филиал НИУ МЭИ, 2013. - 618 с., ил.
13. Micro-Cap 12 Electronic Circuit Analysis Program User's Guide Copyright 1982-2018 by Spectrum Software. [Электронный ресурс] // URL: https://www.iee.et.tu-dresden.de/~jmueller/simulation/soft/microcap/MC12.UsersGuide.pdf (дата обращения 12.12.2023).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КОЭРЦИТИВНОЙ СИЛЫ МАГНИТНЫХ МАТЕРИАЛОВ | 2001 |
|
RU2186381C1 |
| Устройство для контроля электромагнита | 1982 |
|
SU1111135A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2746039C1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2832565C1 |
| Устройство для управления электромагнитом | 1988 |
|
SU1511772A1 |
| СПОСОБ МОНИТОРИНГА ДАВЛЕНИЯ НА ВХОДЕ ГАЗОВОГО ЭЛЕКТРОМАГНИТНОГО КЛАПАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2802294C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЯКОРЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2747003C1 |
| Устройство для измерения параметров электромагнитов | 1983 |
|
SU1145319A1 |
Изобретение относится к электротехнике может быть использовано предпочтительно для управления электромагнитами (ЭМ) и контакторами. Технический результат заключается в расширении функциональных возможностей и повышении помехозащищенности при определении параметров срабатывания ЭМ. Способ определения параметров срабатывания электромагнита основан на анализе переходного процесса изменения тока в его обмотке после подачи на нее напряжения питания, включающий мониторинг локального максимума и локального минимума тока в обмотке при срабатывании и формирование сигнала, свидетельствующего о срабатывании электромагнита. Для определения момента срабатывания ЭМ формируют измерительный интервал, начало которого устанавливают после достижения локального максимума сигналом, соответствующим величине тока в обмотке ЭМ, и гарантированно до момента достижения этим сигналом локального минимума в любых допустимых условиях эксплуатации ЭМ. А окончание измерительного интервала устанавливают после достижения локального минимума сигналом, соответствующим величине тока в обмотке ЭМ, с задержкой, достаточной для сохранения величины измеренного локального минимума. Причем формирование сигнала, свидетельствующего о срабатывании ЭМ, осуществляют в момент достижения локального минимума, который фиксируют, когда на измерительном интервале падение уровня сигнала, соответствующего величине тока в обмотке ЭМ, сменяется его нарастанием, а величину локального минимума сохраняют до окончания измерительного интервала. При снятии напряжения питания с обмотки ЭМ сигнал, свидетельствующий о срабатывании ЭМ, обнуляют. 2 н. и 5 з.п. ф-лы, 7 ил.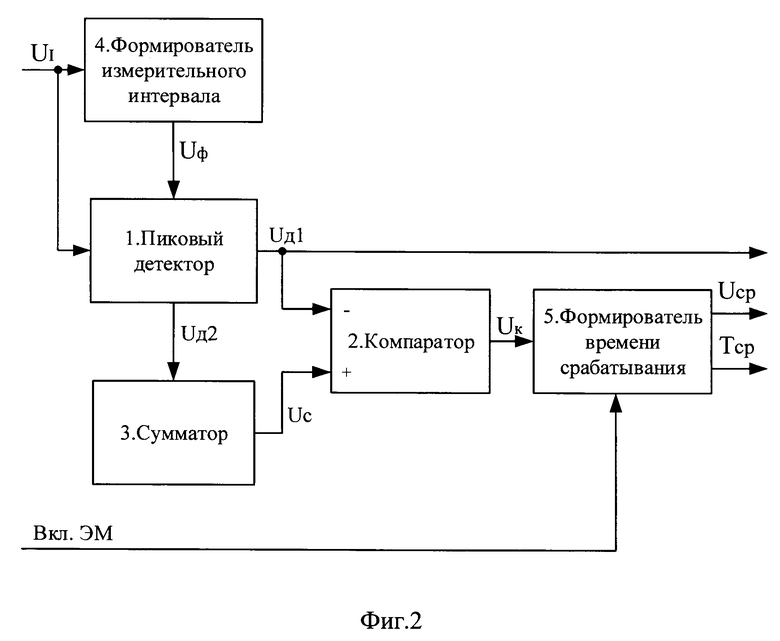
1. Способ определения параметров срабатывания электромагнита, основанный на анализе переходного процесса изменения тока в его обмотке после подачи на нее напряжения питания, включающий мониторинг локального максимума и локального минимума тока в обмотке при срабатывании и формирование сигнала, свидетельствующего о срабатывании электромагнита, отличающийся тем, что для определения момента срабатывания электромагнита формируют измерительный интервал, начало которого устанавливают после достижения локального максимума сигналом, соответствующим величине тока в обмотке электромагнита, и гарантированно до момента достижения этим сигналом локального минимума в любых допустимых условиях эксплуатации электромагнита, а окончание измерительного интервала устанавливают после достижения локального минимума сигналом, соответствующим величине тока в обмотке электромагнита, с задержкой, достаточной для сохранения величины измеренного локального минимума, причем формирование сигнала, свидетельствующего о срабатывании электромагнита, осуществляют в момент достижения локального минимума, который фиксируют, когда на измерительном интервале падение уровня сигнала, соответствующего величине тока в обмотке электромагнита, сменяется его нарастанием, а величину локального минимума сохраняют до окончания измерительного интервала, и при снятии напряжения питания с обмотки электромагнита сигнал, свидетельствующий о срабатывании электромагнита, обнуляют.
2. Способ определения параметров срабатывания электромагнита по п. 1, отличающийся тем, что начало и окончание измерительного интервала формируют в результате сравнения сигнала, соответствующего величине тока в обмотке электромагнита, и его преобразованного инерционным звеном значения, причем начало измерительного интервала формируют в момент времени, когда величина преобразованного инерционным звеном значения сигнала начинает превышать величину самого сигнала, соответствующего величине тока в обмотке электромагнита, после чего окончание измерительного интервала формируют в момент времени, когда после достижения локального минимума величина самого сигнала, соответствующего величине тока в обмотке электромагнита, станет выше значения сигнала, преобразованного инерционным звеном, а величину постоянной времени инерционного звена выбирают экспериментально или расчетными методами таким образом, чтобы начало измерительного интервала наступало по времени гарантированно раньше, чем момент достижения сигналом, соответствующим величине тока в обмотке электромагнита, локального минимума при срабатывании в любых допустимых условиях эксплуатации электромагнита и окончание измерительного интервала отстояло по времени от момента достижения локального минимума сигнала, соответствующего величине тока в обмотке электромагнита, на отрезок времени, достаточный для сохранения величины локального минимума.
3. Способ определения параметров срабатывания электромагнита по п. 1, отличающийся тем, что для измерения значения времени срабатывания электромагнита формируют интервал времени, длительность которого определяют от момента подачи напряжения питания на обмотку электромагнита до момента достижения локального минимума сигналом, соответствующим величине тока в обмотке электромагнита.
4. Устройство для определения параметров срабатывания электромагнита, содержащее пиковый детектор, на вход которого поступает сигнал, соответствующий величине тока в обмотке электромагнита, компаратор и сумматор, отличающееся тем, что в него введены формирователь измерительного интервала, на вход которого поступает сигнал, соответствующий величине тока в обмотке электромагнита, и формирователь времени срабатывания с двумя входами и двумя выходами, а пиковый детектор снабжен вторым входом и вторым выходом, причем выход сумматора соединен с прямым входом компаратора, с инверсным входом которого соединен первый выход пикового детектора, который является первым выходом устройства, второй выход пикового детектора соединен с входом сумматора, а выход формирователя измерительного интервала соединен со вторым входом пикового детектора, выход компаратора соединен с первым входом формирователя времени срабатывания, на второй вход которого поступает командный сигнал подачи напряжения питания на обмотку электромагнита, а первый и второй выходы формирователя времени срабатывания являются соответственно вторым и третьим выходами устройства.
5. Устройство для определения параметров срабатывания электромагнита по п. 4, отличающееся тем, что формирователь измерительного интервала содержит компаратор, три резистора и конденсатор, причем первые выводы первого и второго резисторов соединены между собой и являются входом формирователя измерительного интервала, второй вывод первого резистора соединен с прямым входом компаратора и первым выводом третьего резистора, второй вывод которого соединен с положительным выводом источника питания, второй вывод второго резистора соединен с инверсным входом компаратора и первым выводом конденсатора, второй вывод которого соединен с отрицательным выводом источника питания, при этом выход компаратора является выходом формирователя измерительного интервала.
6. Устройство для определения параметров срабатывания электромагнита по п. 4, отличающееся тем, что формирователь времени срабатывания содержит два D-триггера, инвертор, два резистора, два диода и конденсатор, причем первый вход формирователя времени срабатывания соединен с тактовым входом первого D-триггера, вход сброса первого D-триггера соединен с выходом инвертора, вход которого соединен со вторым входом формирователя времени срабатывания, который соединен также с тактовым входом второго D-триггера, вход сброса которого соединен с катодами первого и второго диодов и первым выводом второго резистора, анод первого диода соединен с первым выводом первого резистора и первым выводом конденсатора, второй вывод которого соединен с положительным выводом источника питания, анод второго диода соединен с прямым выходом первого D-триггера, который одновременно является первым выходом формирователя времени срабатывания, причем входы данных первого и второго D-триггеров соединены и с положительным выводом источника питания, а их установочные входы соединены с отрицательным выводом источника питания, с которым соединены также вторые выводы обоих резисторов, а прямой выход второго D-триггера является вторым выходом формирователя времени срабатывания.
7. Устройство для определения параметров срабатывания электромагнита по п. 4, отличающееся тем, что пиковый детектор содержит резистор, операционный усилитель, конденсатор и диод, при этом первый вывод резистора соединен с прямым входом операционного усилителя, инверсный вход которого соединен с первым выводом конденсатора, второй вывод которого соединен с отрицательным выводом источника питания, второй вывод резистора является первым входом пикового детектора, причем в пиковый детектор дополнительно введен управляемый ключ, управляющий вход которого является вторым входом пикового детектора, первый вывод управляемого ключа соединен с выходом операционного усилителя, катодом диода и вторым выходом пикового детектора, а анод диода соединен с первым выводом конденсатора, вторым выводом управляемого ключа и первым выходом пикового детектора.
| US 10895608 B2, 19.01.2021 | |||
| US 2021134502 A1, 06.05.2021 | |||
| СПОСОБ РЕГУЛИРОВАНИЯ ВРЕМЕНИ СРАБАТЫВАНИЯ ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773298C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ КЛАПАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2783869C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ СРАБАТЫВАНИЯ ДВУХОБМОТОЧНОГО ЭЛЕКТРОМАГНИТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1987 |
|
SU1840227A1 |
| Устройство для управления электромагнитами | 1984 |
|
SU1229851A2 |

