Изобретение относится к вибрационной технике и может быть использовано в различных областях народного хозяйства для настройки вибромашин на заданный-ре- жим колебаний в условиях существования многорежимности.
Известен способ настройки вибромашины на резонансные колебания путем использования несимметричной кусочно-линейной характеристики упругого элемента.
Однако реализация данного способа зависит от скорости разгона вибропривода, что в свою очередь не дает полной уверенности в реализации заданного режима.
Известен способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей, в котором на вибромашину воздействуют дополнительной гармонической силой. Это приводит к уменьшению частотного диапазона, при котором наряду с требуемым режимом колебаний рабочего органа вибромашины существуют другие нежелательные режимы.
Способ обеспечивает повышение технологической устойчивости работы вибромашины, но одновременно ограничивает область ее применения в реальных условиях эксплуатации,так каком позволяет реализовать только один из режимов колебаний.
Целью изобретения является расширение технологических возможностей вибромашины.
Поставленная цель достигается с тем, что согласно способу, заключающемуся в определении начального положения рабочей массы и установлении ее в это положение, фиксируют ее, производят разгон привода вибромашины и расфиксируют рабочую массу, регистрируют перемещение и скорость перемещения рабочей массы, строят зависимость скорости рт перемещения, по которой определяют начальное положение рабочей массы при нулевой начальной скорости, определяют начальную фазу вынуждающей силы и смещение рабочей массы, смещают рабочую массу в определенное начальное положение, а
|СЛ
С
И И
ю со
расфиксируют ее при заданной фазе вынуждающей силы.
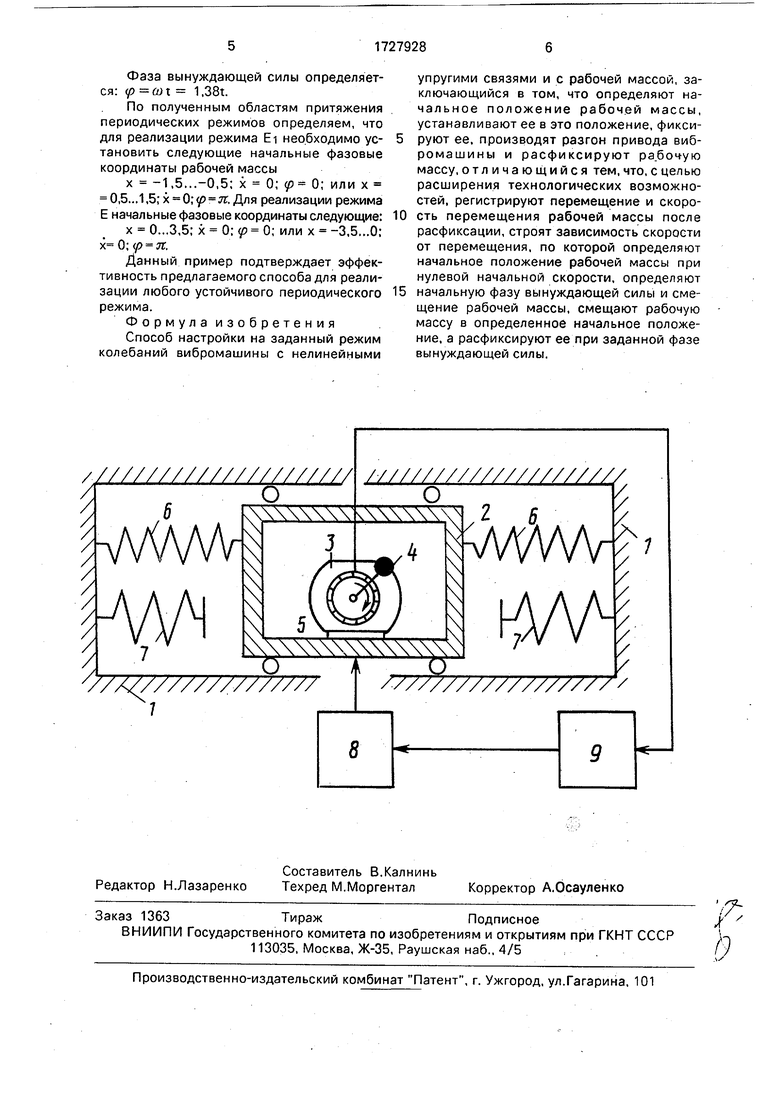
На чертеже схематично показана одно- массовая вибромашина для реализации предлагаемого способа с трилинейной характеристикой упругой подвески, фиксирующим механизмом для установки рабочей массы в заданном начальном положении и управляющим блоком, отпускающим фиксирующий механизм в определенный момент времени, соответствующий заданному значению фазы вынуждающей силы, которая определяется из полной области притяжения.
Вибромашина состоит из корпуса 1, в котором установлена рабочая масса 2, способная совершать поступательное колебательное движение под действием вынуждающей силы, например, дебаланс- ного возбудителя 3 колебаний, имеющего неуравновешенную массу 4 и датчик 5 угла поворота. Упругие элементы 6, выполненные, например, в виде цилиндрической винтовой или плоской пружины, связывают рабочую массу 2 с корпусом 1, а упругие упоры 7, закреплены одним концом с корпусом 1, установлены таким образом, что между их свободными концами и рабочей массой 2 имеются некоторые зазоры Ai и Д2 с каждой стороны соответственно. Такая упругая система, состоящая из упругих упоров 7, реализует трилинейную характеристику восстанавливающей силы. Вибромашина .включает в себя также фиксирующий механизм 8, способный смещать рабочую массу 2 относительно корпуса 1, фиксировать ее в заданном положении и отпускать в момент получения управляющего сигнала от формирователя 9 импульсов.
Способ реализуется следующим образом.
Перед запуском вибромашины фиксирующим механизмом 8 фиксируют рабочую массу 2 в заданное положение х х0, т.е. начальная скорость х0 0, а датчик 5 угла поворота неуравновешенной массы 4 настраивают на угол р (ро. В результате этого обеспечивается запуск вибромашины из заданных координат х0, х0 0, р0, которые находятся внутри области притяжения требуемого периодического режима.
После включения привода вибромашины дебалансного возбудителя 3 колебаний начинает вращаться неуравновешенная масса 4. При этом датчик 5 угла поворота создает последовательность импульсов в моменты времени, когда фаза поворота неуравновешенной массы р совпадает с углом (р0 на который настроен датчик 5 угла поворота. При включении формирователя 9 импульсов после разгона возбудителя с требуемой частоты вращения очередной сигнал
датчика 5 угла поворота передается на фиксирующий механизм 8, в результате чего рабочая масса 2 расфиксируется и начинает совершать возвратно поступательное движение относительно корпуса 1. Таким образом осуществляется запуск вибромашины из заданного начального состояния, в результате чего реализуется требуемый режим колебаний.
В качестве примера, поясняющего сущность предлагаемого способа, рассмотрим возможность реализации двух периодических режимов колебаний в вибромашине, динамика которой описывается дифференциальным уравнением
х + f(x) + bx Hcos (a) t + (р)
где х, х, х - перемещение, скорость и ускорение рабочей массы соответственно;
Н, 1), р , - амплитуда, частота и фаза
вынуждающей силы соответственно; t - текущее время; .
Ь- коэффициент линейной диссипации;
f(x) - нелинейная характеристика упругой восстанавливающей силы, показанная на фиг. 1а;
35
C2(xi - DI) при х 5i ;
f(x) Cix при д х Й2 ; Са(х - Da) при х (32, где DI. 2 40 5i.2(1-Ci/C2).
Выберем следующие безразмерные параметры: Н 0,5; (о 1,38; b 0,01; Ci 1,0; С2 4,0; (5i -0,5; & 1,5.
Для полной системы получена область притяжения устойчивых периодических режимов EI и Е2 при р 0, приведенная на фиг. 2, и полная область притяжения при изменении р от 0 до Т ш, где Т ш - период вынуждающей силы Т (t) 2 л/а, Т (i) 6,28/1,38 4,55, приведенная на фиг. 3 в виде семи отдельных сечений (фрагментов) в моменты времени t, равные
0;
1
Т а); Т о) ; о
Т а) ;
45
Т а); Т а); Т а). оо
Фаза вынуждающей силы определяется: р ftn - 1,38t.
По полученным областям притяжения периодических режимов определяем, что для реализации режима EI необходимо установить следующие начальные фазовые координаты рабочей массы
х -1,5...-0,5; х 0; р 0; или х 0,5...1,5;х 0, у) :7Г, Для реализации режима Е начальные фазовые координаты следующие:
х О...3,5; х 0; р 0; или х -3.5...0; гг.
Данный пример подтверждает эффективность предлагаемого способа для реализации любого устойчивого периодического режима.
Форму л а изо бретени я
Способ настройки на заданный режим колебаний вибромашины с нелинейными
упругими связями и с рабочей массой, заключающийся в том, что определяют начальное положение рабочей массы, устанавливают ее в это положение, фиксируют ее, производят разгон привода вибромашины и расфиксируют ра.бочую массу, отличающийся тем, что, с целью расширения технологических возможностей, регистрируют перемещение и скорость перемещения рабочей массы после расфиксации, строят зависимость скорости от перемещения, по которой определяют начальное положение рабочей массы при нулевой начальной скорости, определяют
начальную фазу вынуждающей силы и смещение рабочей массы, смещают рабочую массу в определенное начальное положение, а расфиксируют ее при заданной фазе вынуждающей силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Виброударная машина | 1989 |
|
SU1708435A1 |
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1985 |
|
SU1351696A1 |
| Способ настройки на многокомпонентные резонансные колебания вибромашин с нелинейными упругими связями | 1989 |
|
SU1713671A1 |
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1986 |
|
SU1380805A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И ПОДДЕРЖАНИЯ РЕЗОНАНСНЫХ РЕЖИМОВ КОЛЕБАНИЙ ВИБРАЦИОННОЙ МАШИНЫ С ПРИВОДОМ ОТ АСИНХРОННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2589639C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2523045C1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| МАГНИТОВЯЗКИЙ МАЯТНИК | 2005 |
|
RU2291546C1 |
Изобретение относится к вибрационной технике. Цель изобретения - расширение технологических возможностей - достигается за счет реализации нескольких режимов колебаний в частотном диапазоне,соответствующем зоне многорежимности. 1 ил.
6
О
www
//////////////////////
/ /
/ / /
| Крюков Б.И | |||
| Динамика вибрационных машин резонансного типа | |||
| - Киев: Наукова думка, 1967, с | |||
| Устройство для разметки подлежащих сортированию и резанию лесных материалов | 1922 |
|
SU123A1 |
| Способ настройки на резонансные колебания вибромашины с кусочно-линейной характеристикой упругих связей | 1986 |
|
SU1380805A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
