Изобретение относится к вибрационной технике и может быть использовано во всех отраслях промышленности для возбуждения механических колебаний на резонансных частотах.
Один из наиболее перспективных способов создания высокопроизводительных энергосберегающих вибрационных машин основан на явлении резонанса. В резонансном состоянии колебательная система машины совершает движение, близкое к собственному, при котором упругие и инерционные силы взаимно уравновешиваются, а энергия возбудителя колебаний расходуется только на преодоление диссипативных сил. Однако из-за недостатков резонансных схем существующих вибрационных машин при обычном резонансе вынужденных колебаний - низкой стабильности, сложности настройки, они не получили широкого распространения в промышленности (Гончаревич И.Ф. Вибрация - нестандартный путь. М.: Наука, 1986. С.7-8. Вибрации в технике: Справочник в 6 томах. Т 4. Вибрационные процессы. М.: Машиностроение, 1981, с.139-141, с.351).
Во многих вибрационных машинах и установках применяется не один, а несколько вибровозбудителей, установленных на одном рабочем органе (несущем теле). Необходимым условием нормального функционирования таких машин является согласованная синхронная работа вибровозбудителей.
Известен способ возбуждения механических колебаний, основанный на использовании явления самосинхронизации двух или более кинематически и электрически не связанных между собой инерционных (дебалансных) вибровозбудителей (неуравновешенных роторов), установленных на общем рабочем органе (несущем теле), который может совершать колебания на упругой подвеске. Роторы вибровозбудителей получают вращение от независимых асинхронных электродвигателей или электродвигателей постоянного тока (Блехман И.И. Что может вибрация? М.: Наука. 1988. С.132, рис.1,а).
Явление самосинхронизации состоит в том, что роторы двух или более дебалансных вибровозбудителей вращаются с одинаковыми или кратными угловыми скоростями ω и с определенными взаимными фазами, тогда как те же роторы на неподвижном основании имеют разные скорости вращения ωi, i=1, 2, …, s, s≥2. Скорости ωi называются парциальными и предполагаются достаточно близкими.
В настоящее время наиболее широкое распространение получили вибромашины и установки с двумя самосинхронизирующимися вибровозбудителями, так как с увеличением их числа области синхронизации сильно сужаются.
Это решение имеет следующие недостатки:
- Резонансные режимы колебаний машин и установок с самосинхронизирующимися дебалансными вибровозбудителями, являющиеся энергетически наиболее эффективными, практически нереализуемы из-за их низкой стабильности при обычном резонансе вынужденных колебаний. По этой причине указанные машины работают в далеко зарезонансном режиме колебаний.
- При зарезонансной настройке для преодоления области интенсивных резонансных колебаний нужно иметь двигатель, мощность которого в 5-6 раз превышает мощность, необходимую для работы в зарезонансном режиме.
- Создаваемые при вращении дебалансов большие центробежные силы нагружают подшипники, что снижает их ресурс и влечет большой непроизводительный расход энергии на преодоление сопротивлений вращению вала. Имеются и другие недостатки, среди которых отметим, что в зарезонансном режиме работы вынуждающая сила должна иметь дополнительную составляющую, действующую против сил инерции.
В качестве прототипа принят параметрический вибровозбудитель и способ его работы по патенту РФ №2072660 (заявка №94008295, В06В 1/16, опубл. 27.01.1997).
Параметрический вибровозбудитель содержит корпус, приводной вал, упругие элементы и тела качения; на приводном валу жестко закреплен по крайней мере один инерционный элемент в виде уравновешенного маховика (ротора), снабженного парой незамкнутых беговых дорожек, которые расположены симметрично относительно двух взаимно перпендикулярных диаметров, а их центры смещены от оси вращения маховика в диаметрально противоположных направлениях, причем круговые беговые дорожки одной пары повернуты вокруг оси маховика на угол 90° относительно другой, на круговых беговых дорожках размещены тела качения с возможностью обкатки в виде четырех одинаковых уравновешенных бегунков.
Рабочий орган (плита, к которой крепится, например, лоток вибротранспортера), вибровозбудитель (уравновешенный маховик (ротор) с телами качения) и упругие связи образуют колебательную систему. Маховик представляет собой монолитную деталь с беговыми дорожками на обеих его плоскостях.
Возбуждаются резонансные механические колебания в направлении оси ох за счет периодического принудительного изменения инерционных параметров колебательной системы.
Физическая сущность известного способа возбуждения колебаний состоит в том, что в зоне параметрического резонанса автоматически образуется неуравновешенность маховика, которая и приводит к появлению возмущающей силы. Вместе с тем маховик играет роль аккумулятора кинетической энергии. В нерезонансной зоне маховик полностью уравновешен.
Недостатки прототипа следующие:
- До настоящего времени остается открытым вопрос о возможности согласованной синхронной работы двух или более параметрических вибровозбудителей без специальных дополнительных синхронизирующих средств.
- Предназначен для возбуждения однонаправленных (по оси ох) прямолинейных механических колебаний, что существенно ограничивает области его применения.
- Невозможность возбуждения круговых и эллиптических колебаний рабочего органа.
Эти недостатки устраняются предлагаемым решением.
Решается задача создания принципиально нового энергосберегающего способа для возбуждения резонансных механических колебаний многовибраторных машин и установок с расширением эксплуатационных возможностей и производительности.
Технический результат - это возбуждение резонансных механических колебаний путем согласованной синхронной работы двух или более параметрических вибровозбудителей, установленных на общем рабочем органе (несущем теле), связанном с основанием упругими связями, с достижением эффекта самосинхронизации без вмешательства извне. При этом реализуется ранее неизвестный обобщенный принцип самосинхронизации, объединяющий в себе известные принципы самосинхронизации колеблющихся тел типа маятников и вращающихся тел типа неуравновешенных роторов.
Этот технический результат достигается тем, что резонансные колебания возбуждают путем периодического принудительного изменения инерционных параметров колебательной системы, образованной массами М1 и М2 на упругой подвеске и двумя или более одинаковыми параметрическими вибровозбудителями, включающими роторы с беговыми дорожками и телами качения в них и приводимыми во вращение от независимых электродвигателей, осуществляют упругую подвеску масс М1 и М2 в двух взаимно перпендикулярных направлениях по осям ох, оу, производят настройку колебательной системы, задавая усредненное значение парциальных угловых скоростей вращения роторов вибровозбудителей ω, эффективные собственные частоты λ1, λ2 соответственно тел качения и масс М1, М2, которые удовлетворяют резонансному соотношению
ω=λ1+λ2,
где λ1=νω, λ2=(λ2x+λ2y)/2, λ2x, λ2y - собственные частоты, соответствующие поступательным противофазным формам колебаний масс М1 и М2 в направлении осей ox, oy, причем осуществляется самосинхронизация колебательной системы, в результате которой между массами М1 и М2 устанавливается синхронный резонансный противофазный режим колебаний с частотой Ω2≅λ2, а между телами качения - синхронный резонансный когерентный режим колебаний с частотой Ω1≅νω, при этом центр масс (тяжести) системы тел качения каждого из роторов вращается вокруг их осей с одинаковой угловой скоростью Ω=Ω2 в направлении вращения роторов, тогда как угловые скорости самих роторов могут быть различными;
для возбуждения поступательных колебаний масс М1 и М2 по эллиптическим траекториям собственные частоты λ2x, λ2y выбирают различными, но так, чтобы эти частоты были близкими и располагались в резонансной зоне, причем частоту λ2 определяют по формуле
λ2=(λ2x+λ2y)/2.
На фиг.1 изображена схема одного из возможных устройств, реализующего предлагаемый способ, а на фиг.2 - инерционный элемент параметрического вибровозбудителя.
Вибрационное устройство состоит из двух одинаковых тел (стальных плит) 1 и 2. Плиты соединены между собой и опорной плитой 3 цилиндрическими винтовыми пружинами 4. Пружины зажаты между стаканами и гнездами в плитах с помощью шпилек 5 и гаек с контргайками 6. Опорная плита 3 установлена на основание 7. Эта упругая система обладает широкими возможностями регулирования поперечной жесткости сжатых пружин путем изменения их длины.
Два одинаковых параметрических вибровозбудителя 8 симметрично закреплены на плите 1 и приводятся во вращение от независимых асинхронных двигателей 9 или электродвигателей постоянного тока. Оси приводных валов 10 вибровозбудителей 8 параллельны и удалены от центра масс O плиты 1 на одинаковое расстояние. На плитах 1, 2 закреплены регулировочные грузы 11.
Две массы устройства, одна из которых М1 (суммарная масса тел 1, 8, 9, 11, 13), а другая М2 (общая масса тел 2, 11), образуют двухмассную колебательную систему.
Упругая система обеспечивает возможность поступательных противофазных свободных колебаний масс М1 и М2 по любым направлениям плоскости oxy (плоскости вращения роторов 8), задаваемой неподвижными осями ox, oy.
Выбор двухмассной динамической модели обусловлен тем, что при противофазных резонансных колебаниях масс М1 и М2 передаваемое на лабораторный стол вибрационное воздействие в значительной мере компенсируется.
Каждый из вибровозбудителей включает по крайней мере один ротор 8, имеющий с обеих сторон пару незамкнутых беговых дорожек 12, расположенных симметрично относительно двух взаимно перпендикулярных его диаметров. Центры беговых дорожек 12 смещены от оси вращения роторов на одинаковые расстояния AB=l в сторону беговой дорожки (фиг.2). В беговых дорожках 12 размещены одинаковые уравновешенные тела качения 13 массой m каждое с возможностью обкатки дорожек 12.
Система координат Ax'y'z' с началом в центре масс ротора 8 движется поступательно относительно неподвижной O1x1y1z1, причем ось z' направлена по оси приводного вала (фиг.2). В положении статического равновесия оси этих координатных систем совпадают.
Положение массы М1 определяется координатами x, y, а тел качения углами φk, k=1, 2, …, N (N=4) (фиг.2). Ориентация беговых дорожек определяется углами ψk=ω1t+2πk/N, где ω1 - угловая скорость левого ротора, k=1, 2, …, N. Заметим, что углы ψk отсчитываются относительно равномерно вращающейся вместе с ротором системе координат.
Способ осуществляется следующим образом. При равномерном вращении роторов вибровозбудителей тела качения образуют в поле центробежных сил инерции подсистему осцилляторов (маятников) качения с точками подвеса в центрах кривизны беговых дорожек с собственными частотами  , где ωi - угловая скорость i-го ротора вибровозбудителя. Вторую подсистему образуют связанные пружинами массы М1 и М2.
, где ωi - угловая скорость i-го ротора вибровозбудителя. Вторую подсистему образуют связанные пружинами массы М1 и М2.
За рабочие колебания принимаются резонансные колебания на частоте λ2, соответствующей поступательным противофазным формам колебаний масс М1 и М2 в направлении осей ox и oy. При этом форма резонансных колебаний на частоте λ2 близка к соответствующей форме свободных колебаний.
Двухмассная колебательная подсистема удерживается упругими связями по всем двенадцати возможным координатам в пространстве. В общем случае решение свободных колебаний при отсутствии демпфирования состоит из j=12 гармоник, которые входят в каждую координату и складываются, не оказывая влияния друг на друга. В различных координатах отдельные гармоники находятся или в одинаковой фазе или в противофазе. Другие сдвиги фаз невозможны. Если амплитуда одной гармоники известна для какой-либо гармоники, то тем самым определяются амплитуды этой гармоники и для всех остальных координат при помощи коэффициентов распределения χij, где i - номер координаты, j - номер собственной частоты.
Форма резонансных колебаний на частоте λj недемпфированной системы совпадает с собственной формой свободных колебаний с частотой λj. Очевидно, что и при небольшом демпфировании форма резонансных колебаний будет близка к форме свободных колебаний.
Производят настройку колебательной системы вибрационного устройства, задавая усредненную угловую скорость вращения ω роторов вибровозбудителей, параметры ν, ε, эффективные собственные частоты λ1=νω, λ2=(λ2x+λ2y)/2 соответственно тел качения и масс М1, М2, удовлетворяющих резонансному соотношению
ω=λ1+λ2 при  ,
,
где  , S≥2, λ2x, λ2y - собственные частоты, соответствующие поступательным противофазным формам колебаний масс М1 и М2 в направлении осей ox, oy,
, S≥2, λ2x, λ2y - собственные частоты, соответствующие поступательным противофазным формам колебаний масс М1 и М2 в направлении осей ox, oy,  , ε=σν2NmρC/(2M1l) - коэффициент, пропорциональный отношению общей массы тел качения к массе М1,
, ε=σν2NmρC/(2M1l) - коэффициент, пропорциональный отношению общей массы тел качения к массе М1,  ,
,  - относительные коэффициенты линейного демпфирования тел качения и массы М1. Здесь IB - момент инерции тел качения относительно оси обкатки, n0=b0/2IB, n=b/2M1 - приведенные коэффициенты линейного демпфирования в направлении координат φk и x, y, b=(bx+by)/2; b0, bx, by - обобщенные коэффициенты линейного сопротивления в направлении координат φk и x, y, ρC=ВС; σ - число роторов вибровозбудителей.
- относительные коэффициенты линейного демпфирования тел качения и массы М1. Здесь IB - момент инерции тел качения относительно оси обкатки, n0=b0/2IB, n=b/2M1 - приведенные коэффициенты линейного демпфирования в направлении координат φk и x, y, b=(bx+by)/2; b0, bx, by - обобщенные коэффициенты линейного сопротивления в направлении координат φk и x, y, ρC=ВС; σ - число роторов вибровозбудителей.
Для возбуждения поступательных противофазных колебаний масс М1 и М2 по эллиптическим траекториям в плоскости вращения роторов вибровозбудителей, задаваемой осями ox, oy, собственные частоты λ2х, λ2у выбирают различными, но так, чтобы они были близки и располагались в резонансной зоне, причем λ2=(λ2х+λ2у)/2.
Для возбуждения поступательных противофазных колебаний масс М1 и М2 по круговым траекториям собственные частоты выбирают равными λ2х=λ2у=λ2 при bx≅by.
При вращении двух (или любого четного числа) роторов вибровозбудителей в противоположных направлениях возбуждаются резонансные поступательные прямолинейные колебания масс М1 и М2 в направлении оси oy.
Устройство работает следующим образом. Энергия к колебательной системе вибрационного устройства подводится посредством вращающихся роторов вибровозбудителей.
Сначала рассмотрим раздельную работу вибровозбудителей, например левого.
При равномерном вращении ротора 8 с угловой скоростью ω1, тела качения этого ротора образуют подсистему N одинаковых осцилляторов (маятников) качения с осями обкатки в центрах кривизны беговых дорожек с одинаковыми собственными частотами  , которые выполняют функции инерционного элемента вибрационного устройства. Колеблющиеся массы М1, М2 могут выполнять роль рабочих органов. Если за рабочий орган взята масса М2, то масса М1 выполняет роль реактивной массы.
, которые выполняют функции инерционного элемента вибрационного устройства. Колеблющиеся массы М1, М2 могут выполнять роль рабочих органов. Если за рабочий орган взята масса М2, то масса М1 выполняет роль реактивной массы.
Равномерное вращение ротора 8 порождает периодическое изменение инерционных параметров (инертных свойств) колебательной системы с периодом 2π/ω1. При настройке  и выполнении порогового условия в системе возбуждается многократный комбинационный параметрический резонанс с возникновением коллективного взаимодействия указанных выше подсистем. При этом колебательная система виброустановки синхронизируется на частотах
и выполнении порогового условия в системе возбуждается многократный комбинационный параметрический резонанс с возникновением коллективного взаимодействия указанных выше подсистем. При этом колебательная система виброустановки синхронизируется на частотах  , где
, где  ,
,  - некратные частоты генерации.
- некратные частоты генерации.
Вследствие синхронизации фаз осцилляторов качения по типу колеблющихся маятников (феномен Гюйгенса) центр масс системы тел качения в первом приближении описывают окружность по отношению к системе координат Ax'y'z' (фиг.2), которая движется поступательно относительно неподвижной Oxyz. Угловая скорость центра масс по этой окружности равна  . Поскольку
. Поскольку  , то неуравновешенная центробежная сила инерции будет возбуждать резонансные колебания масс М1, М2, которые в свою очередь вызывают резонансные колебания осцилляторов качения.
, то неуравновешенная центробежная сила инерции будет возбуждать резонансные колебания масс М1, М2, которые в свою очередь вызывают резонансные колебания осцилляторов качения.
Таким образом, автоматически образуется невидимый дебаланс, который вращается с угловой скоростью , тогда как ротор инерционного элемента вращается с угловой скоростью ω1. При ν=0.25 угловая скорость приблизительно на 25% ниже угловой скорости ω1.
Отключая левый вибровозбудитель и рассматривая равномерное вращение ротора 8 правого вибровозбудителя с угловой скоростью ω2, достаточно близкой к ω1, приходим к образованию второго невидимого дебаланса, который вращается с угловой скоростью .
При совместной работе вибровозбудителей невидимые дебалансы самосинхронизируются по типу неуравновешенных роторов. При этом невидимые дебалансы вращаются с одинаковой угловой скоростью Ω, тогда как угловые скорости роторов инерционных элементов могут быть различными.
Здесь одновременно реализуется самосинхронизация колеблющихся тел типа маятников и вращающихся тел типа неуравновешенных роторов. Согласованная работа вибровозбудителей достигается самой системой без вмешательства извне и проявляется как результат процесса ее самоорганизации.
В отличие от самосинхронизации нескольких обычных дебалансных вибровозбудителей, установленных на одном несущем теле, область самосинхронизации нескольких параметрических вибровозбудителей не зависит от их числа и определяется шириной резонансной зоны (области неустойчивости положения равновесия). Эта область может быть сколь угодно широкой.
Пример осуществления способа.
Для проверки возможности практического осуществления способа была изготовлена действующая модель согласно фиг.1.
Четырехмаятниковый инерционный элемент массой mИЭ=1,72 кг (ротор 8 с телами качения 13) каждого из вибровозбудителей закреплялся на консольном конце приводного вала электродвигателя постоянного тока. В модели использовались одинаковые электродвигатели мощностью 77 Вт с регулируемым числом оборотов (0-3000 об/мин). Роторы и тела качения массой m=0,105 кг каждое изготовлены из стали.
Колебательная система модельной установки построена так, что М1=27,7 кг, М2=20 кг, λ2х=150,7 с-1, λ2y=155,4 c-1, ν=0,25, ε=0,007. Здесь λ2x, λ2y - экспериментально определенные (методом вынужденных колебаний) собственные частоты поступательных противофазных прямолинейных колебаний масс М1, М2 в направлении осей ox, oy. Заметим, что в направлении оси ox используются поперечные колебания сжатых цилиндрических винтовых пружин. Отстройка собственных поступательных противофазных форм колебаний масс М1, и М2 осуществлялась с помощью регулировочных грузов 11 и изменения жесткости пружин.
На первом этапе испытаний исследовалась раздельная работа вибровозбудителей. Они поочередно вводились в режим комбинационного параметрического резонанса с угловыми скоростями ω1=193 с-1, ω2=198 с-1. При этом были зафиксированы следующие значения частот генерации противофазных колебаний масс М1, М2:  ,
, .
.
Угловая скорость вращения роторов и частота колебаний масс М1, М2 измерялись с помощью строботахометра, а амплитуда колебаний - ручным вибрографом BP-1.
При стробоскопическом освещении и незначительном рассогласовании частоты вспышек лампы наблюдались противофазные колебания масс М1 и М2 по эллиптическим траекториям (практически по гармоническому закону). Отметим отсутствие биений двух достаточно близких собственных частот λ2x, λ2y, что указывает на синхронизацию частот генерации по Гюйгенсу.
При совместной работе вибровозбудителей получены следующие результаты: ω1=189,4 с-1, ω2=197,8 c-1, Ω2=149 c-1. При этом наблюдались поступательные противофазные колебания масс М1, М2 по эллиптическим траекториям.
Резонансные колебания масс М1, М2 по круговым траекториям получаются как частный случай при λ2x=λ2y и bx≅by.
При противоположном направлении вращений роторов наблюдались поступательные прямолинейные противофазные колебания масс М1, М2 в направлении оси oy.
Итак, колебательная система вибрационного устройства самосинхронизируется на частоте вращения невидимых дебалансов (на частоте колебаний масс М1, М2), тогда как угловые скорости самих роторов вибровозбудителей различны. Между роторами устанавливается синхронный режим, при котором возникает суммарная возмущающая сила.
При совместной работе параметрических вибровозбудителей реализуется ранее неизвестный обобщенный принцип самосинхронизации, объединяющий в себе два известных принципа - самосинхронизацию колеблющихся тел типа маятников (феномен Гюйгенса) и самосинхронизацию вращающихся тел типа неуравновешенных роторов.
Предложенный способ возбуждения имеет следующие достоинства:
1. Резонансные колебания возбуждаются при любых начальных условиях. Эффект самовозбуждения обеспечивает практически абсолютную устойчивость резонансного режима колебаний (в пределах резонансной зоны) при высокой добротности колебательной системы.
2. Установочная мощность вибропривода может быть существенно (в два раза) уменьшена по сравнению с используемыми в промышленности инерционными (дебалансными) самосинхронизирующимися вибровозбудителями с зарезонансной настройкой, т.е. способ относится к числу новых энергосберегающих технологий.
3. Рост амплитуды параметрических колебаний по показательному закону делает выгодным использование предложенного способа возбуждения в вибромашинах, работающих с частыми выключениями и включениями (например, в дозаторах). При этом не требуется производить остановку двигателя. Достаточно вывести вибромашину из резонансной зоны.
4. Вибромашина с самосинхронизирующимися параметрическими вибровозбудителями - это самоорганизующийся "технический коллектив", в котором отдельные объекты подстраиваются под ритм работы коллектива в целом.
5. Реализуется эффект расширения резонансной зоны при значительном увеличении линейного демпфирования рабочего органа относительно уровня демпфирования тел качения. Во всех других случаях увеличение демпфирования сужает резонансную зону.
6. С увеличением числа самосинхронизирующихся обычных инерционных (дебалансных) вибровозбудителей, установленных на одном несущем теле, область синхронизации сильно сужается, тогда как область синхронизации параметрических вибровозбудителей не зависит от числа вибровозбудителей и определяется шириной резонансной зоны, причем резонансная зона может быть сколь угодно широкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННАЯ ТРАНСПОРТИРУЮЩАЯ МАШИНА | 2012 |
|
RU2532235C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Способ возбуждения колебаний и устройство для его осуществления | 2015 |
|
RU2669163C2 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2019 |
|
RU2716862C1 |
| Способ и устройство оценки технического состояния инженерного сооружения | 2016 |
|
RU2617800C1 |
| Роторно-маятниковый инерционный элемент | 2021 |
|
RU2790957C1 |

Изобретение относится к вибрационной технике и может быть использовано для возбуждения механических колебаний на резонансных частотах. Техническим результатом изобретения является повышение энергосбережения и расширение функциональных возможностей. Предлагается осуществлять упругую подвеску масс в двух взаимно перпендикулярных направлениях по осям ox, oy, производить настройку колебательной системы, задавая эффективные собственные частоты, соответственно, тел качения и масс, а также эффективную резонансную угловую скорость вращения роторов (приводится расчетная формула). Рассматриваются случаи возбуждения поступательных колебательных масс по эллиптическим траекториям и по круговым. 2 з.п. ф-лы, 2 ил.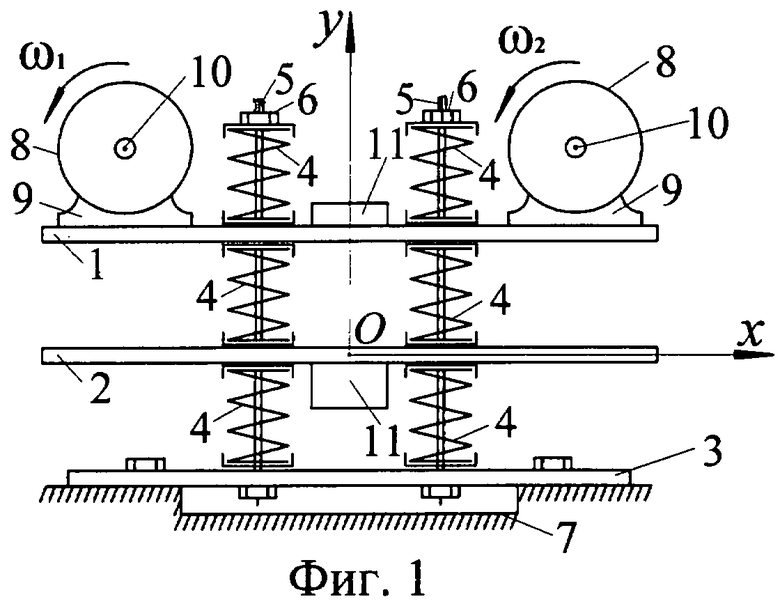
1. Способ возбуждения резонансных механических колебаний, заключающийся в том, что резонансные колебания возбуждают путем периодического принудительного изменения инерционных параметров колебательной системы, образованной массами M1 и М2 на упругой подвеске и двумя или более одинаковыми параметрическими вибровозбудителями, включающими роторы с беговыми дорожками и телами качения в них и приводимыми во вращение от независимых электродвигателей, отличающийся тем, что осуществляют упругую подвеску масс M1 и М2 в двух взаимно перпендикулярных направлениях по осям ox, oy, производят настройку колебательной системы, задавая усредненное значение парциальных угловых скоростей вращения роторов вибровозбудителей ω, эффективные собственные частоты λ1, λ2, соответственно тел качения и масс M1 и М2, которые удовлетворяют резонансному соотношению
ω=λ1+λ2,
где λ1=νω, λ2=(λ2x+λ2y)/2, λ2x, λ2y - собственные частоты, соответствующие поступательным противофазным формам колебаний масс M1 и М2 в направлении осей ox, oy, причем осуществляется самосинхронизация колебательной системы, в результате которой между массами M1 и М2 устанавливается синхронный резонансный противофазный режим колебаний с частотой Ω2≅λ2
, а между телами качения - синхронный резонансный когерентный режим колебаний с частотой Ω1≅νω, при этом центр масс (тяжести) системы тел качения каждого из роторов вращается вокруг их осей с одинаковой угловой скоростью Ω=Ω2 в направлении вращения роторов, тогда как угловые скорости самих роторов могут быть различными.
2. Способ по п.1, отличающийся тем, что для возбуждения поступательных колебаний масс M1 и М2 по эллиптическим траекториям собственные частоты λ2x, λ2y выбирают различными, но так, чтобы эти частоты были близкими и располагались в резонансной зоне, причем частоту λ2 определяют по формуле λ2=(λ2x+λ2y)/2.
3. Способ по п.1, отличающийся тем, что для возбуждения поступательных круговых колебаний масс M1 и М2 собственные частоты λ2x, λ2y выбирают равными, причем λ2=λ2x=λy.
| ВИБРОВОЗБУДИТЕЛЬ | 1994 |
|
RU2072660C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2335356C2 |
| Способ возбуждения резонансных колебаний механических систем и устройство для его осуществления | 1988 |
|
SU1609515A1 |
| Электромагнитный ограничитель тока | 1940 |
|
SU60002A1 |
| GB 1185730 A, 25.03.1970 | |||
| US 2958228 A, 01.11.1960. | |||

