Изобретение относится к контрольно- измерительной технике и может быть использовано для определения положения детали со сквозным отверстием, протяженность которого превышает размер поперечного сечения отверстия.
Известен способ определения углов поворота объекта, заключающийся в том, что направляют пучок излучения на объект, формируют два отраженных от объекта пучка с помощью отражателя, выполненного в виде двух призм БР-1800 с взаимно ортогональными ребрами, и один из них оптически поворачивают до совмещения проекции направляющего вектора коллимированного пучка на одну из осей чувствительности анализатора с другой и измеряют одноименные координаты полученных оптических изображений по одной оси чувствительности анализатора.
Недостатком известного способа является невозможность измерить угловые смещения отверстия, что обусловлено наличием связанного с объектом отражателя, состоящего из двух призм. Установка в отверстии малого диаметра двух призм технически невозможна.
Наиболее близким по технической сущности является способ измерения углового положения детали с отверстием, заключающийся в том, что освещают внутреннюю поверхность отверстия двумя точечными источниками света, расположенными симметрично относительно базовой оси, угловое положение детали в плоскости измерения, проходящей через базовую ось и геометрические центры источников света, определяют в плоскости, перпендикулярной базовой линии, вдоль линии пересечения данной плоскости с плоскостью измерения по величине несимметричности распределения полей освещенности, образованных лучами, напрямую прошедшими через отверстие, относительно полей освещенности, образованных лучами, отраженными от внутренней поверхности отверстия.
Недостатками известного способа являются невозможность измерять линейные смещения отверстия в плоскости, перпендикулярной оси отверстия, и невысокая точность, Линейные отклонения оси отверстия относительно базовой оси приводят к изменению положения полей, образованных отраженными от внутренней поверхности отверстия лучами. По положению этих полей в плоскости регистрации судят об угловом положении отверстия. Поэтому линейные отклонения оси отверстия являются источником погрешности при измерении углового положения отверстия и обуславливают невысокую точность измерения. Цель изобретения - расширение технологических возможностей измерений путем
обеспечения возможности определять линейное положение отверстия относительно базовой оси, а также повышение точности измерения углового положения оси отверстия за счет устранения погрешности, обусловленной линейными отклонениями оси отверстия относительно базовой оси.
Поставленная цель достигается за счет того, что деталь располагают между осветителем и экраном так, что ось отверстия номинально совпадает с линией измерения, перпендикулярной поверхности экрана, направляют на деталь два луча света симметрично относительно линии измерения, и имеющих возможность проходить через отверстие детали и отражаться от ее внутренней поверхности, и измеряют один из параметров распределения освещенности полей, образованных лучами в плоскости экрана, вдоль линии пересечения плоскости
экрана и плоскости, образованной линией измерения и оптическими осями лучей света, направляют на деталь не менее двух дополнительных лучей света, один из которых располагают в плоскости, проходящей через линию измерения перпендикулярно плоскости, проходящей через линию измерения и оптические оси основных лучей света, а другой ориентируют так, что его оптическая ось совпадает с осью симметрии
других вышеупомянутых лучей, периферийных по отношению к нему, изменяют и фиксируют расстояние между деталью и экраном, зафиксированное расстояние используют при определении положения детали, а в качестве параметра измеряют смещение полей освещенности, образованных периферийными лучами относительно поля освещенности, образованного лучом, проходящим через ось симметрии периферийных лучей.
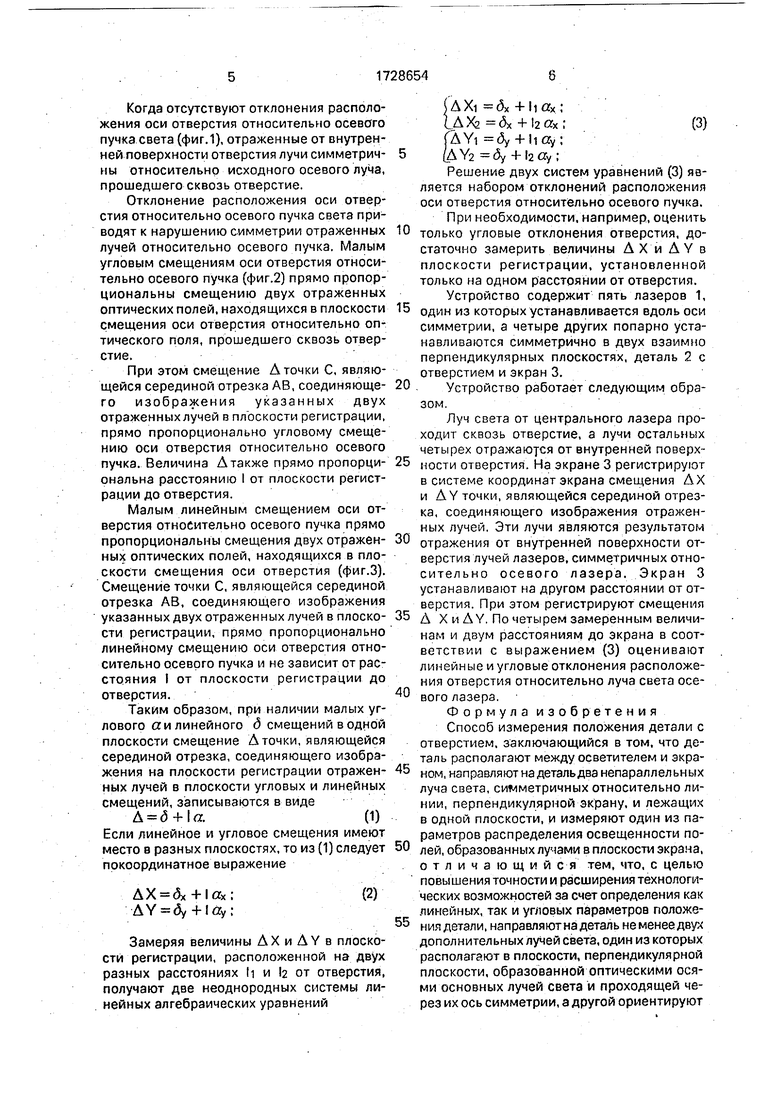
На фиг.1 представлено формирование отраженных лучей при отсутствии отклонений расположения отверстия; на фиг.2 - то
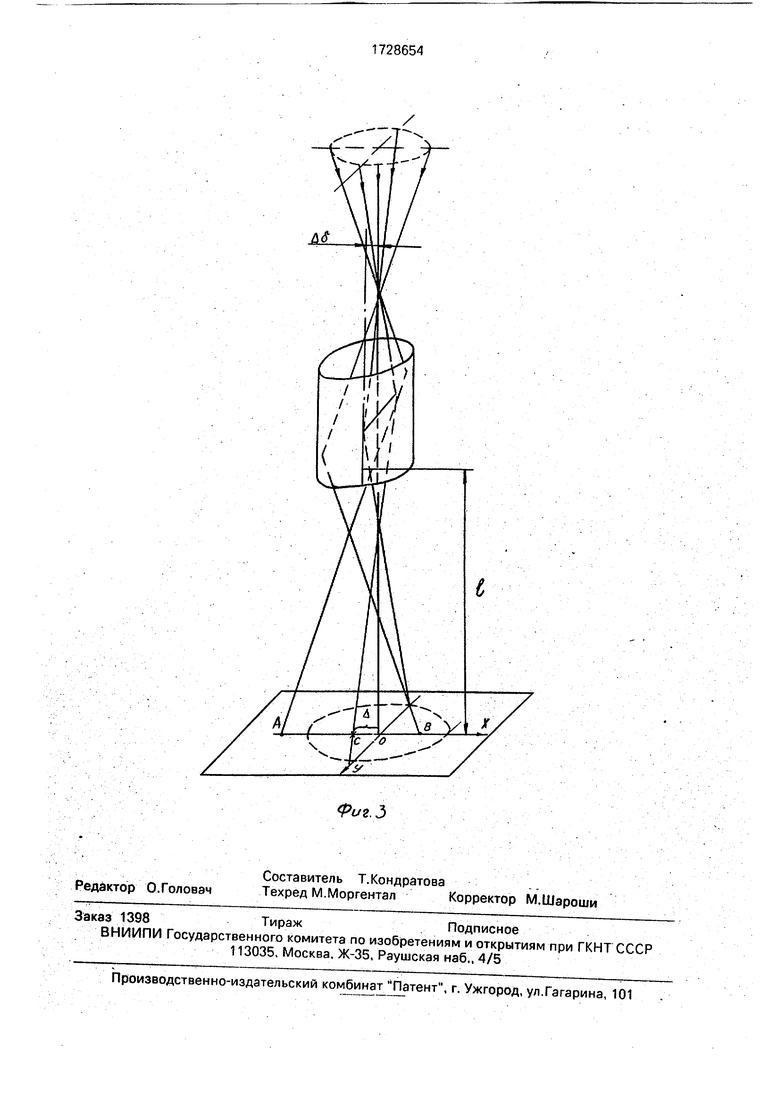
же, при наличии угловых отклонений; на фиг.З - то же, при наличии линейных отклонений расположения; на фиг.4 - схема устройства, реализующего предлагаемый способ.
Для простоты рассматривается случай, когда формируются пять исходных пучков света, один из которых является осью симметрии остальных четырех, расположенных попарно в двух взаимно перпендикулярных плоскостях.
Когда отсутствуют отклонения расположения оси отверстия относительно осевого пучка света (фиг.1), отраженные от внутренней поверхности отверстия лучи симметрич- ны относительно исходного осевого луча, прошедшего сквозь отверстие.
Отклонение расположения оси отверстия относительно осевого пучка света приводят к нарушению симметрии отраженных лучей относительно осевого пучка. Малым угловым смещениям оси отверстия относительно осевого пучка (фиг.2) прямо пропорциональны смещению двух отраженных оптических полей, находящихся в плоскости смещения оси отверстия относительно оптического поля, прошедшего сквозь отверстие.
При этом смещение А точки С, являющейся серединой отрезка АВ, соединяюще- го изображения указанных двух отраженных лучей в плоскости регистрации, прямо пропорционально угловому смещению оси отверстия относительно осевого пучка. Величина Атакже прямо пролорци- ональна расстоянию I от плоскости регистрации до отверстия.
Малым линейным смещением оси отверстия относительно осевого пучка прямо пропорциональны смещения двух отражен- ных оптических полей, находящихся в плоскости смещения оси отверстия (фиг.З). Смещение точки С, являющейся серединой отрезка АВ, соединяющего изображения указанных двух отраженных лучей в плоско- сти регистрации, прямо пропорционально линейному смещению оси отверстия относительно осевого пучка и не зависит от расстояния I от плоскости регистрации до отверстия.
Таким образом, при наличии малых углового а и линейного д смещений водной плоскости смещение А точки, являющейся серединой отрезка, соединяющего изображения на плоскости регистрации отражен- ных лучей в плоскости угловых и линейных смещений, записываются в виде
Д 5-Н«.(1)
Если линейное и угловое смещения имеют место в разных плоскостях, то из (1) следует покоординатное выражение
(2)
ДХ 5х+1ах; AY (5y +Icry;
Замеряя величины АХ и AY в плоскости регистрации, расположенной на двух разных расстояниях h и 2 от отверстия, получают две неоднородных системы линейных алгебраических уравнений
(AXi 5x +liax;
tAX2 &+l2ax;(3)
fAYi ду + liay;
(AY2 ду + hay;
Решение двух систем уравнений (3) яа- ляется набором отклонений расположения оси отверстия относительно осевого пучка.
При необходимости/например, оценить только угловые отклонения отверстия, достаточно замерить величины АХ и AY в плоскости регистрации, установленной только на одном расстоянии от отверстия.
Устройство содержит пять лазеров 1, один из которых устанавливается вдоль оси симметрии, а четыре других попарно устанавливаются симметрично в двух взаимно перпендикулярных плоскостях, деталь 2 с отверстием и экран 3.
Устройство работает следующим образом.
Луч света от центрального лазера проходит сквозь отверстие, а лучи остальных четырех отражаются от внутренней поверхности отверстия. На экране 3 регистрируют в системе координат экрана смещения АХ и A Y точки, являющейся серединой отрезка, соединяющего изображения отраженных лучей, Эти лучи являются результатом отражения от внутренней поверхности отверстия лучей лазеров, симметричных относительно осевого лазера. Экран 3 устанавливают на другом расстоянии от отверстия. При этом регистрируют смещения А X и AY. По четырем замеренным величинам и двум расстояниям до экрана в соответствии с выражением (3) оценивают линейные и угловые отклонения расположения отверстия относительно луча света осевого лазера.
Формула изобретения
Способ измерения положения детали с отверстием, заключающийся в том, что деталь располагают между осветителем и экраном, направляют на деталь два непараллельных луча света, симметричных относительно линии, перпендикулярной экрану, и лежащих в одной плоскости, и измеряют один из параметров распределения освещенности полей, образованных лучами в плоскости экрана, отличающийся тем, что, с целью повышения точности и расширения технологических возможностей за счет определения как линейных, так и угловых параметров положения детали, направляют на деталь не менее двух дополнительных лучей света, один из которых располагают в плоскости, перпендикулярной плоскости, образованной оптическими осями основных лучей света и проходящей через их ось симметрии, а другой ориентируют
так, что его оптическая ось совпадаете осью симметрии основных лучей, изменяют и фиксируют расстояние между деталью и экраном, зафиксированное расстояние .используют при определении положения
детали, а в качестве параметра измеряют смещение полей освещенности, образованных лучами относительно поля освещенности, образованного лучом, проходящим через ось симметрии основных лучей.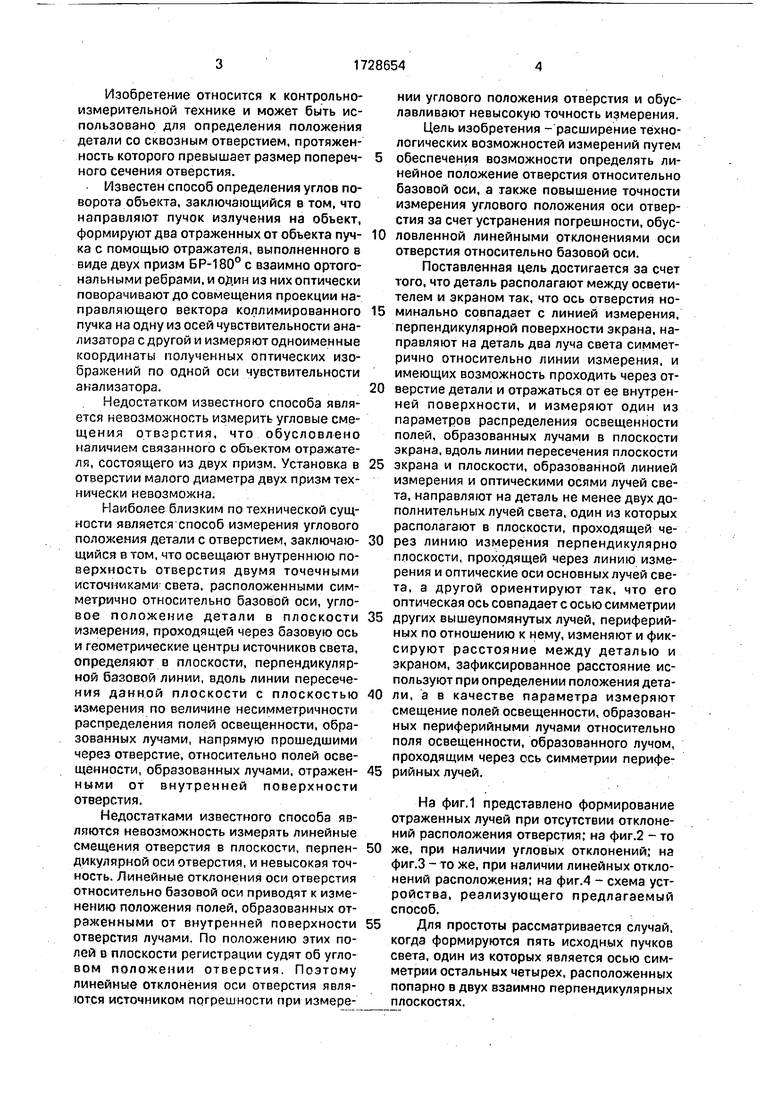
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЙ ДЕФЕКТОВ НА АСФЕРИЧЕСКОЙ ПОВЕРХНОСТИ ОПТИЧЕСКОЙ ДЕТАЛИ (ВАРИАНТЫ) | 2015 |
|
RU2612918C9 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ СТЕНКИ ЕМКОСТИ | 2013 |
|
RU2642165C2 |
| Голографический микроскоп | 1986 |
|
SU1314295A1 |
| Устройство для исследования прозрачных неоднородностей | 1979 |
|
SU873000A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ПЕРЕМЕЩЕНИЙ | 1999 |
|
RU2165070C2 |
| МИКРОСКОП ДЛЯ РАБОТЫ В ПРОХОДЯЩЕМ И (ИЛИ) ОТРАЖЕННОМ СВЕТЕ | 1986 |
|
RU2037854C1 |
| Сдвиговый спекл-интерферометр (варианты) | 2019 |
|
RU2726045C1 |
| БЕСКОНТАКТНЫЙ СПОСОБ ИЗМЕРЕНИЯ ВНУТРИГЛАЗНОГО ДАВЛЕНИЯ | 1995 |
|
RU2114550C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ УСТАНОВКИ КОЛЕС АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2033602C1 |
| Устройство для измерения угла конуса внутренних конических поверхностей деталей | 1990 |
|
SU1737265A1 |
Изобретение относится к контрольно- измерительной технике и может быть ис пользовано для определения положения детали со сквозным отверстием, протяженность которого превышает размер поперечного сечения отверстия. Целью изобретения является повышение точности и расширение технологических возможностей способа за счет определения как линейных, так и угловых параметров положения детали, а также за счет устранения погрешности, обусловленной линейными отклонениями оси отверстия относительно базовой оси. При измерении формируют с помощью излучателей (лазеров 1) не менее четырех лучей света, один из которых направлен по оси отверстия детали 2, симметрично относительно остальных. Об угловом и линейном положении отверстия в детали судят по расположению полей освещенности на экране 3, образованных лучами, отраженными от внутренней поверхности отверстия, относительно поля освещенности, образованного лучом, напрямую прошедшим сквозь отверстие. Затем экран 3 устанавливают на другом расстоянии от детали 2 и повторяют измерение. Peзyльtaты измерений используют для определения линейных и угловых отклонений детали 2. 4 ил. (Л С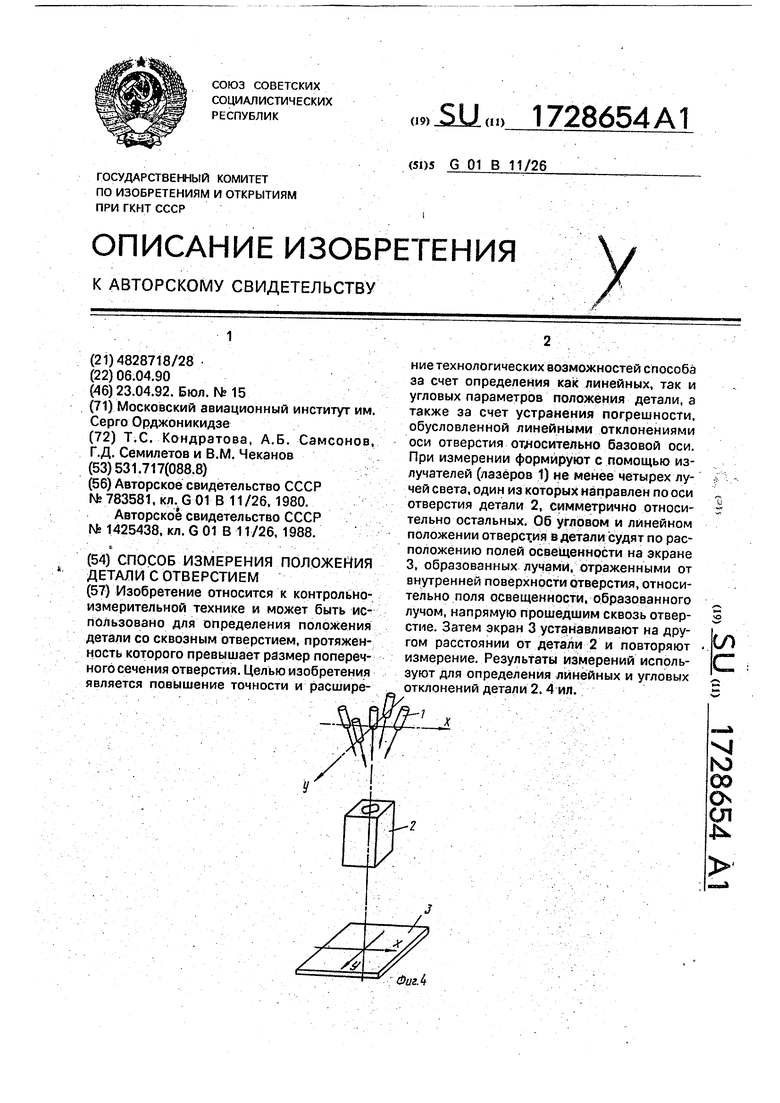
| Способ определения углов поворота объекта | 1977 |
|
SU783581A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Способ измерения углового положения детали | 1986 |
|
SU1425438A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
