Фиг. /
Изобретение относится к животноводству, основано на использовании энергии колебаний и толчков животного и может применяться в устройствах для регистрации двигательной активности животных.
Цель изобретения - повышение информативности за счет регистрации движений животного типа толчков с одновременным обеспечением минимальных габаритов, а также увеличение числа направлений регистрации толчков с разных направлений.
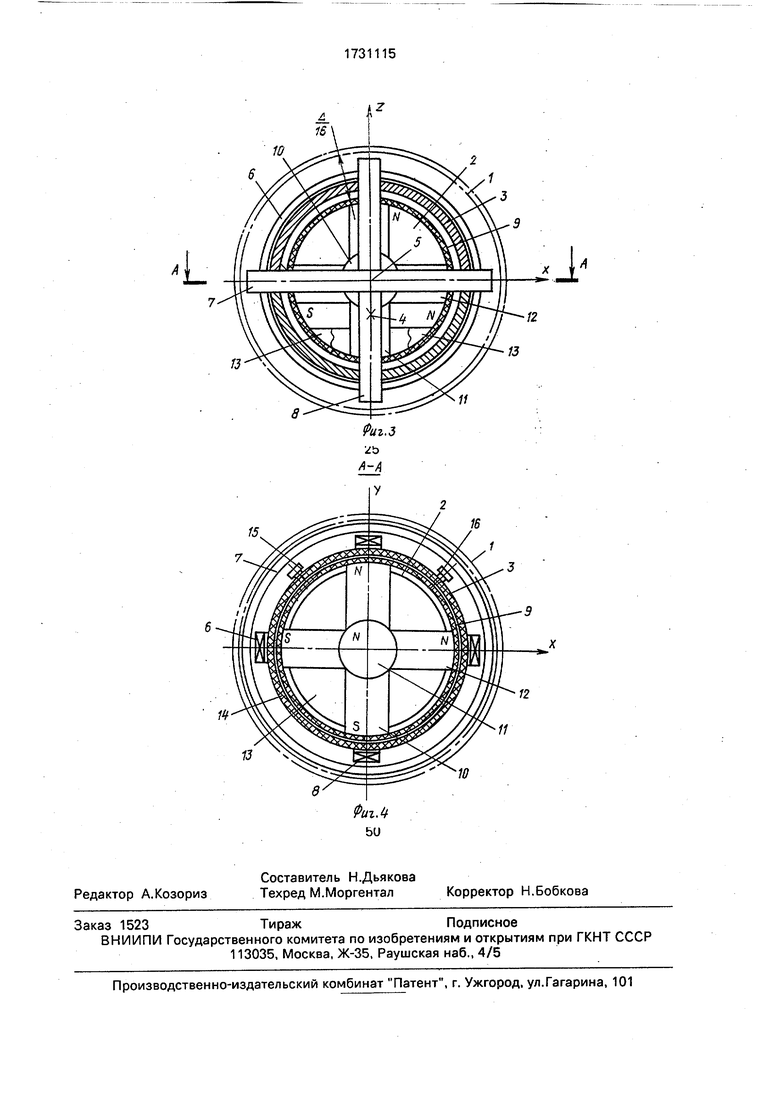
На фиг. 1 показан датчик двигательной активности животного с двухполюсным активным ротором, разрез; на фиг. 2 - электрическая схема соединений катушек обмотки с нагрузкой; на фиг. 3 - датчик с многополюсным (шестиполюсным) активным ротором, разрез; на фиг. 4 - разрез А-А на фиг. 3.
Датчик двигательной активности животного содержит статор 1 с обмоткой и маг- нитопроводом и двуполюсный активный ротор 2 (фиг. 1) или многополюсный (шести- полюсный) активный ротор (фиг. 3-4). Обмотка статора 1 закреплена на немагнитном каркасе 3, в полости которого размещен активный ротор 2. Каркас 3 с обмоткой установлен в полости магнитопровода статора 2. Магнитопровод и каркас 3 выполнены в виде полых сфер, установленных коаксиаль- но. Ротор 2 выполнен в виде сферы с центром 4 тяжести, смещенным относительно геометрического центра 5. Обмотка статора состоит из трех катушек 6-7, оси Y, Z, X которых взаимоперпендикулярны. Пространство между ротором 2 и каркасом 3 заполнено жидкой смазкой.
Многополюсный (шестиполюсный) активный ротор 2 (фиг. 3 и 4) выполнен в виде, например, полой немагнитной сферы 9, в полости которой установлены три постоянных магнита 10-12 и груз 13, при этом оси Y, Z, X магнитов 10-12 взаимоперпендикулярны, груз 13 расположен в одной из половин полости сферы 9. Магнитопровод статора 1 выполнен разъемным из двух частей. Каркас 3 также выполнен разъемным с нижней частью 14, герметично скрепленной с его верхней частью. Каркас 3 оснащен сливными трубками, через которые заливают жидкость в полость каркаса 3. Трубки закрыты пробками 15. Катушки 6-8 могут быть наложены слоями на всю поверхность каркаса 3. В качестве жидкой смазки может быть использовано машинное масло. Суммарный зазор 16 между полюсами активного ротора 2 и магнитопроводом статора 1 не превышает 5 мм,
Ротор 2 изготовлен из магнитного сплава с большой коэрцитивной силой и имеет
воздушный пузырь 17, смещенный относительно геометрического центра 5 ротора 2. Воздушный пузырь 17 (фиг. 1)и груз 13 (фиг. 3) обеспечивают смещение центра 4 тяжести активного ротора 2 относительно его геометрического центра 5.
Катушки 6-8 соединены с нагрузкой 18 через выпрямительные мостики 19 (фиг. 2), но они могут быть соединены с нагрузками
0 непосредственно-каждая катушка со своей нагрузкой.
Датчик работает следующим образом. Активный (фиг. 1) или многополюсный (шестиполюсный)(фиг. 3 и 4) ротор 2 плавает
5 в смазочной жидкости и имеет плавучесть, отличную от нуля, поэтому он ориентируется в поле тяжести определенным образом. Это обеспечивает взаимное перемещение ротора 2 и статора 1 от любых криволиней0 ных перемещений датчика движений типа толчков, а также от вращений его вокруг датчика движений типа толчков, а также от вращений его вокруг любой оси и от ускоренных перемещений по любой прямой
5 (кроме перемещений по вертикали). Взаимное перемещение ротора 2 и статора 1 сопровождается изменением потокосцеп- ления по крайней мере у одной из катушек 6-8 и появлением на ее концах ЭДС индук0 ции. Это относится и кмногополюсному(ше- стиполюсному) ротору (фиг. 3 и 4). Двуполюсный ротор 2 (фиг. 1) не обеспечивает изменения потокосцепления катушек 6-8 при угловых колебаниях и вращениях
5 вокруг оси Z при указанных (фиг. 1) расположении этих катушек. Поэтому устройство с многополюсным (шестиполюсным) активным ротором 2 (фиг. 3) обладает более широким возможностями, чем устройство с
0 двуполюсным ротором 2 (фиг. 1).
На фиг, 1 показано положение ротора 2 сразу после остановки датчика, который двигается по оси X. В исходном состоянии относительного покоя датчика центр пузы5 ря 17 располагается по оси Z, как и центр тяжести 4 ротора 2. Во время движения датчика по оси X влево центр 4 тяжести отклоняется вправо от оси Z, а после остановки датчика он отклоняется влево от
0 нее. Эти отклонения объясняются инерционностью ротора 2, отклонением центра 4 тяжести от геометрического центра 5 ротора 2. Колебательные перемещения центра 4 тяжести и полюсов ротора 2 в плоскости
5 XZ сопровождаются появлением ЭДС на концах катушек 7 и 8 (на катушке 6 ЭДС не возникает, так как ее потокосцепление не изменяется). Аналогично объясняется появление ЭДС на обмотке датчика при других видах его перемещений.
Для уменьшения трения между ротором и статором до окончательной сборки машины производят приработку сферических поверхностей ротора 2 (или сферы 9) и каркаса 3. Для этого на каркас 3 вместо катушек 6-8 надевают специальные катушки, расположенные так же, как и катушки 6-8, и подключают их к источнику трехфазного переменного напряжения, соединив их в звезду или в треугольник. При этом ротор 2 совершает внутри каркаса 3 колебательные перемещения по нескольким направлениям, в результате чего происходит приработка сферических поверхностей ротора 2 и каркаса 3. Затем каркас 3 разбирают, промывают поверхности каркаса 3 и ротора 2 и окончательно собирают датчик.
Формула изобретения 1. Датчик двигательной активности животного, содержащий полый статор с обмоткой и магнитопроводом, активный ротор,
размещенный в полости статора со смещением центра тяжести по отношению к статору, отличающийся тем, что, с целью повышения информативности за счет регистрации движений животного типа толчков с одновременным обеспечением минимальных габаритов, ротор и магнитопровод статора выполнены сферическими, обмотка статора размещена внутри магнитопровода
статора на сферическом немагнитном каркасе, расположенном коаксиально по отношению к магнитопроводу статора, и состоит из трех катушек, оси которых взаимно перпендикулярны, а пространство между ротором и каркасом заполнено жидкой смазкой, причем ротор выполнен двуполюсным.
2. Датчик по п. 1,отличающийся тем, что, с целью увеличения числа направлений регистрации толчков, ротор выполнен
многоплюсным в виде немагнитной сферы с установленными внутри нее тремя постоянными магнитами, оси которых взаимно перпендикулярны.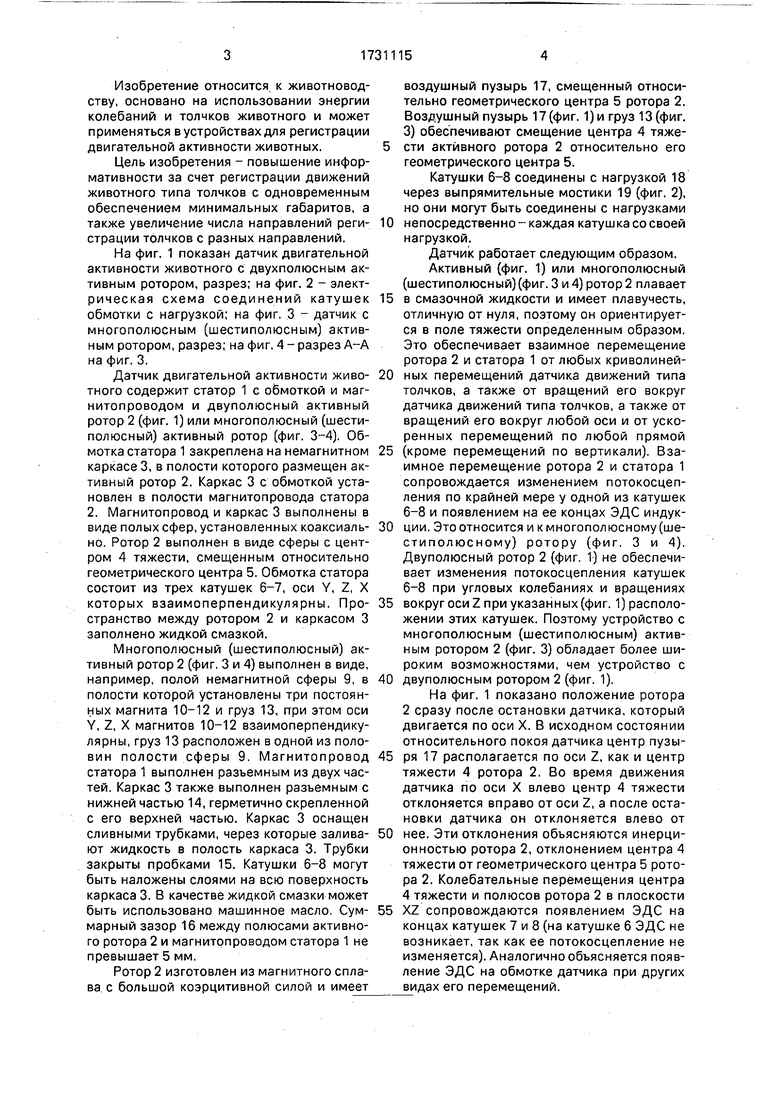

| название | год | авторы | номер документа |
|---|---|---|---|
| Универсальный каскадный многофазный аксиальный магнитоэлектрический генератор | 2017 |
|
RU2704805C2 |
| СКВАЖИННЫЙ ЭЛЕКТРОМАШИННЫЙ ИСТОЧНИК ПИТАНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СИСТЕМЫ | 2003 |
|
RU2242074C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1995 |
|
RU2098908C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2423272C2 |
| ТОРЦЕВОЙ НАБОРНЫЙ ЭЛЕКТРОМОТОР | 2000 |
|
RU2213408C2 |
| Синхронный электрический генератор с многополюсной комбинированной магнитной системой с постоянными магнитами | 2019 |
|
RU2709788C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ УСИЛИТЕЛЬ РУЛЯ АВТОМОБИЛЯ | 2007 |
|
RU2381940C2 |
| СКВАЖИННЫЙ ЭЛЕКТРОМАШИННЫЙ ИСТОЧНИК ПИТАНИЯ ИНКЛИНОМЕТРИЧЕСКОЙ СИСТЕМЫ | 2000 |
|
RU2202849C2 |
| ЦЕНТРОБЕЖНЫЙ НАГНЕТАТЕЛЬ | 1993 |
|
RU2079722C1 |
| БЕСЩЕТОЧНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2012 |
|
RU2526846C2 |
Изобретение относится к области животноводства, основано на использовании энергии колебаний, толчков животных и может применяться в устройствах для регистрации двигательной активности животных. Цель изобретения - повышение информативности за счет регистрации движений животного типа толчков с одновременным обеспечением минимальных габаритов, а также увеличение числа направлений регистрации толчков. Датчик двигательной активности животного выполнен на базе электрической машины, содержащей статор 1 с обмоткой и магн ито про водом и двухполюсный (либо многополюсный) активный ротор 2. Обмотка статора 1 закреплена на немагнитном каркасе 3. В полости каркаса 3 размещен ротор 2. Каркас 3 установлен в магнитопроводе статора 1. Магнитопровод и каркас 3 выполнены в виде полых сфер, установленных коаксиально. Ротор 2 представляет собой сферу с центром 4 тяжести, смещенным относительно геометрического центра 5. Обмотка статора 1 имеет три катушки 6-7, оси которых взаимно перпендикулярны. Пространство между ротором 2 и каркасом 3 заполнено жидкой смазкой, например машинным маслом. Многополюсный активный ротор 2 выполнен в виде полой немагнитной сферы. В полости ее расположены три постоянных магнита, оси которых взаимно перпендикулярны. В одной из половин полости сферы ротора 2 размещен груз, а магнитопровод является разъемным с возможностью герметичного соединения двух его частей. Каркас 3 снабжен сливными трубками для заполнения датчика жидкой смазкой. 1 з.п. ф-лы, 4 ил. 6 /7 5 VI СО 01 8
Фиг. 2
16
10
14
13
11
w
| Электрический генератор | 1979 |
|
SU776488A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
