
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОДВОДНОГО РАСТЕКАНИЯ УТЕЧЕК ИЗ НЕФТЯНЫХ СКВАЖИН И ЛОКАЛИЗАЦИЯ ИХ НА ВОДНОЙ ПОВЕРХНОСТИ | 2016 |
|
RU2623626C1 |
| СПОСОБ СБОРА НЕФТИ ИЛИ НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ СУДОХОДНЫХ РЕК С БЫСТРЫМ ТЕЧЕНИЕМ | 2014 |
|
RU2593295C2 |
| Устройство для контроля за возникновением аварийных утечек нефти и нефтепродуктов из трубопроводов, выполненных в защитных футлярах | 2020 |
|
RU2747171C1 |
| Землесосное и нефтесборочное судно | 1980 |
|
SU1087066A3 |
| Механический кормовой нефтесборщик | 2023 |
|
RU2806169C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ РАЗЛИВОВ НЕФТИ В ВОДНОЙ СРЕДЕ | 2012 |
|
RU2514645C1 |
| УСТРОЙСТВО ДЛЯ ЛОКАЛИЗАЦИИ И СБОРА НЕФТИ ИЛИ НЕФТЕПРОДУКТОВ С ПОВЕРХНОСТИ ВОДЫ | 2016 |
|
RU2617292C1 |
| ДАТЧИК ОМИЧЕСКИЙ ЭКРАНИРУЮЩИЙ ПУЛЬСИРУЮЩЕГО ТОКА | 2010 |
|
RU2451235C2 |
| ПЛАТФОРМА ДЛЯ МОРСКОЙ ДОБЫЧИ НЕФТИ | 2010 |
|
RU2441129C1 |
| Устройство для определения остатка топлива в баке | 1990 |
|
SU1755054A1 |
Использование: локализация утечек нефти. Сущность изобретения: подводный нефтесборщик выполнен в виде торпедооб- разного корпуса с ходовым двигателем, нефтесборочным узлом и системой управления. При перемещении нефтесборщика вдоль трубопровода чистота воды анализируется датчиком наличия нефти в воде. При наличии загрязнения раскрывается нефте- сборочная емкость и нефть собирается в нее. После заполнения последней освобождается поплавок и, всплывая, отмечает место расположения нефтесборочной емкости. 2 з.п.ф-лы, 10 ил.
Изобретение относится к устройствам для локализации нефтяных утечек из таких подводных источников, как трубопроводы, и может быть использовано для защиты окружающей среды от нефтяных загрязнений.
Целью изобретения является расширение технологических возможностей нефтесборщика.
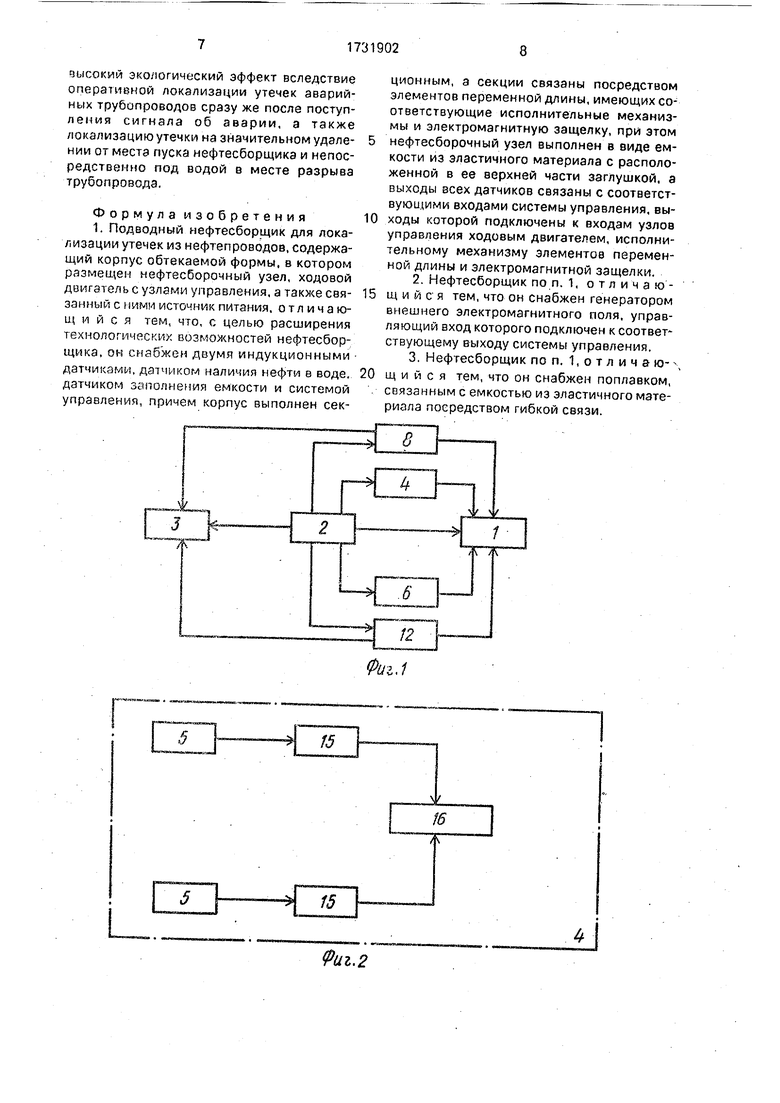
На фиг.1 представлена структурная схема подводного нефтесборщика; на фиг.2 - то же, узла управления движением аппарата; на фиг.З - то же, исполнительного механизма управления выходным патрубком двигателя; на фиг.4 - то же, узла управления безаварийной работой аппарата; на фиг.5 - то же, узла локализации утечки; на фиг.6 - нефтесборщик, вид сбоку; на фиг.7 - нефтесборщик, вид спереди (над местом утечки); на .8 - схема узла управления аппаратом
с заполненной емкостью; на фиг.9 - то же, исполнительного механизма закрытия крышки; на фиг.10 - нефтесборщике заполненной емкостью. На фиг.2 - 5,8 и 9 источник энергии и его связь с элементами устройства не показаны.
Подводный нефтесборщик для локализации утечек нефтепроводов представляет собой торпедообразный аппарат, имеющий обтекаемую форму. В корпусе аппарата размещены ходовой двигатель 1, например водометный движитель, источник 2 питания - аккумулятор, являющийся источником энергии для всех систем аппарата, и нефтесбор- ный узел 3.
Работа аппарата (фиг. 1) обеспечивается системой управления, состоящей из узлов, связанных с регистрирующими датчиками: узел управления движением аппарата 4 с
VJ со
ч5
о
ю
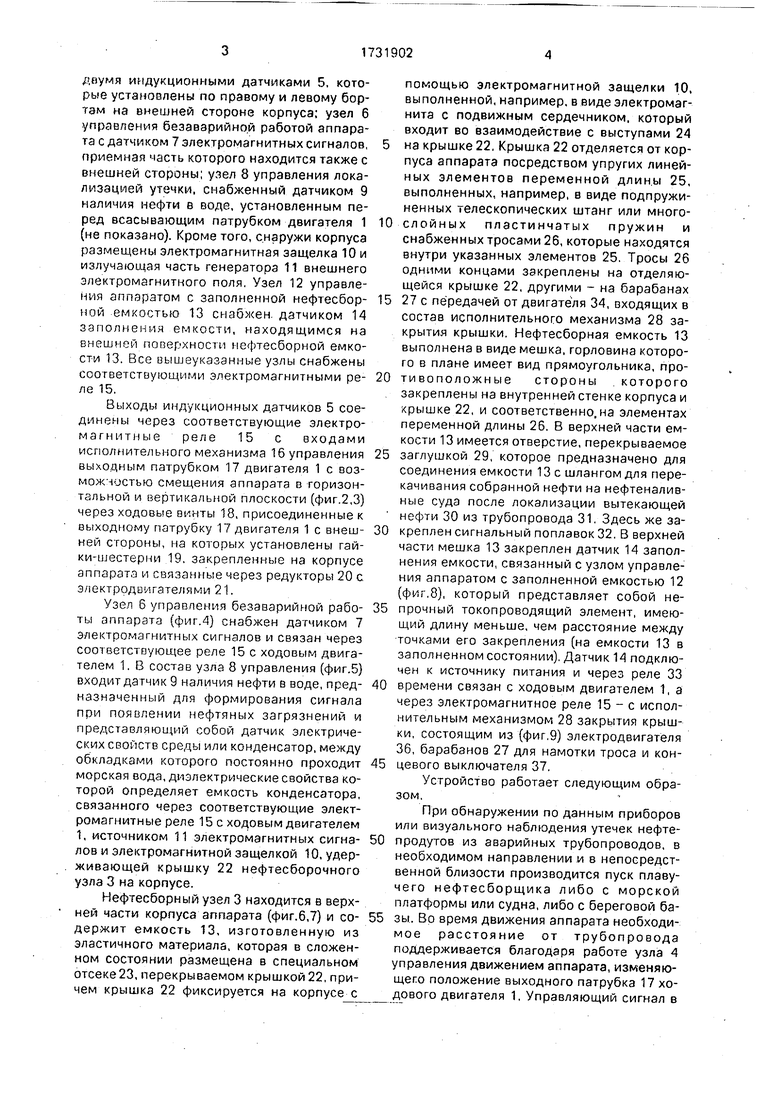
двумя индукционными датчиками 5. которые установлены по правому и левому бортам на внешней стороне корпуса; узел 6 управления безаварийной работой аппарата с датчиком 7 электромагнитных сигналов, приемная часть которого находится также с внешней стороны; узел 8 управления локализацией утечки, снабженный датчиком 9 наличия нефти в воде, установленным перед всасывающим патрубком двигателя 1 (не показано). Кроме того, снаружи корпуса размещены электромагнитная защелка 10 и излучающая часть генератора 11 внешнего электромагнитного поля. Узел 12 управления аппаратом с заполненной нефтесбор- ной емкостью 13 снабжен датчиком 14 заполнения емкости, находящимся на внешней поверхности нсфтесборной емкости 13. Все вышеуказанные узлы снабжены соответствующими электромагнитными реле 15.
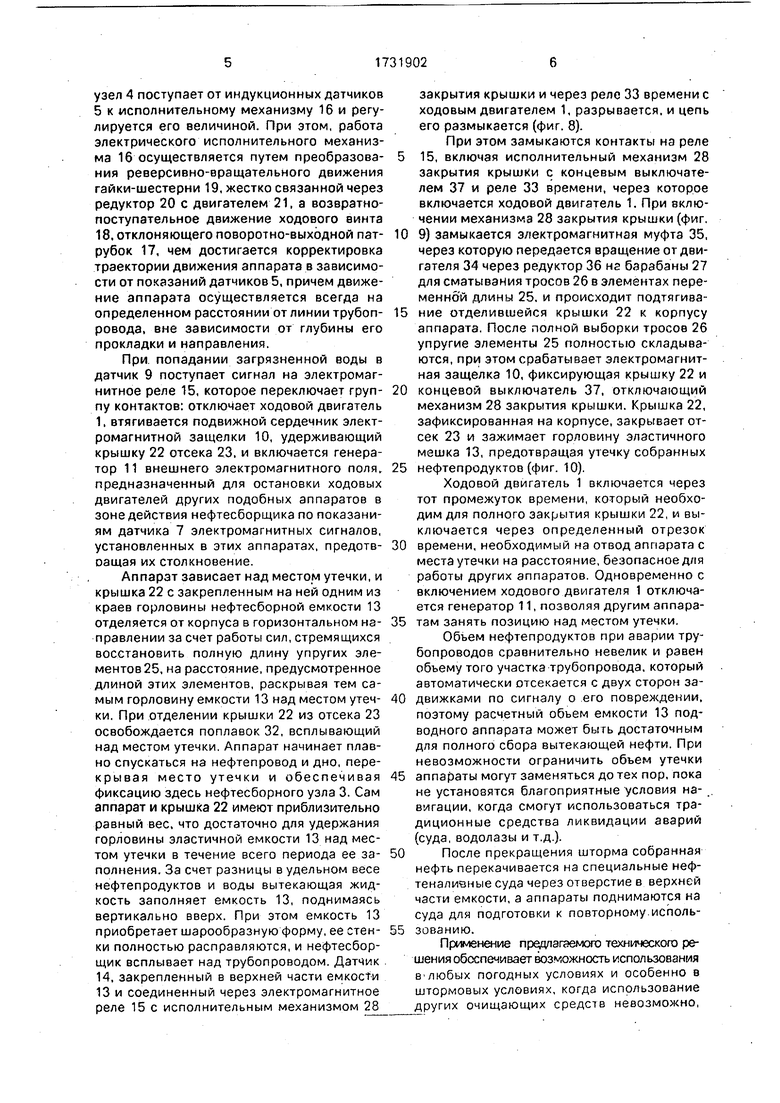
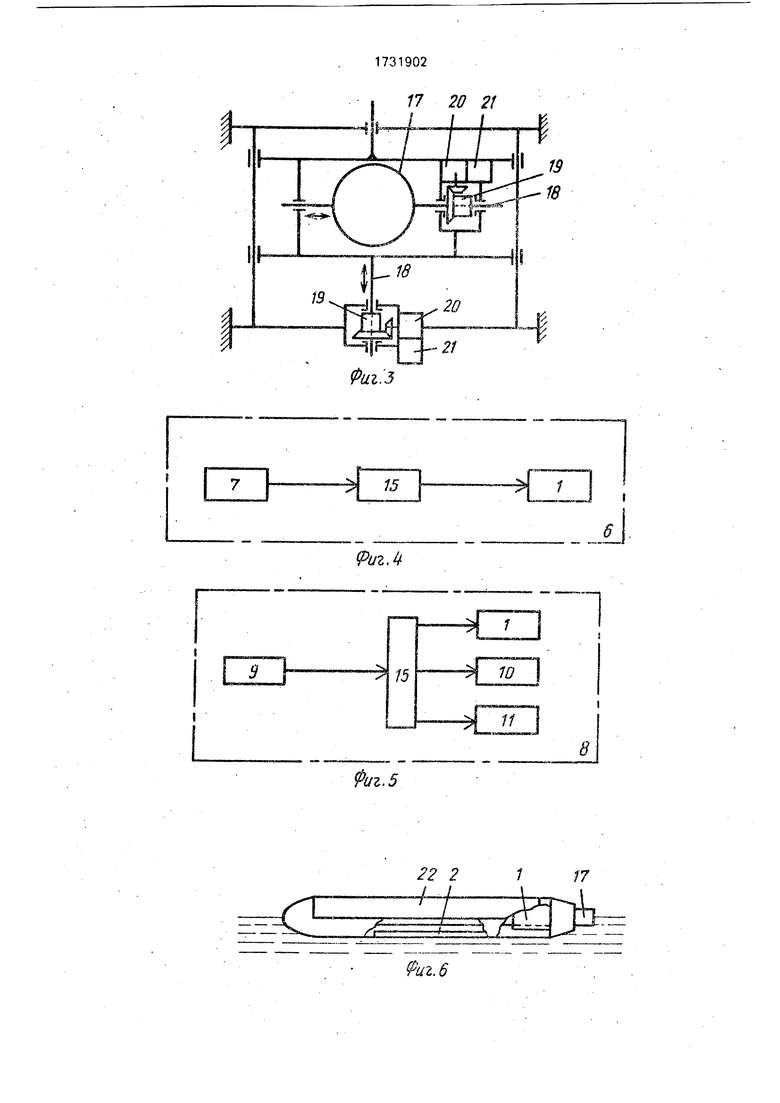
Выходы индукционных датчиков 5 соединены через соответствующие электромагнитные реле 15 с входами исполнительного механизма 16 управления выходным патрубком 17 двигателя 1 с воз- мож-юстью смещения аппарата в горизонтальной и вертикальной плоскости (фиг.2,3) через ходовые винты 18, присоединенные к выходному патрубку 17 двигателя 1 с внешней стороны, на которых установлены гайки-шестерни 19. закрепленные на корпусе аппарата и связанные через редукторы 20 с электродвигателями 21.
Узел 6 управления безаварийной работы аппарата (фиг.4) снабжен датчиком 7 электромагнитных сигналов и связан через соответствующее реле 15 с ходовым двигателем 1. В состав узла 8 управления (фиг.5) входит датчик 9 наличия нефти в воде, предназначенный для формирования сигнала при появлении нефтяных загрязнений и представляющий собой датчик электрических свойств среды или конденсатор, между обкладками которого постоянно проходит морская вода, диэлектрические свойства которой определяет емкость конденсатора, связанного через соответствующие электромагнитные реле 15 с ходовым двигателем 1, источником 11 электромагнитных сигналов и электромагнитной защелкой 10, удерживающей крышку 22 нефтесборочного узла 3 на корпусе.
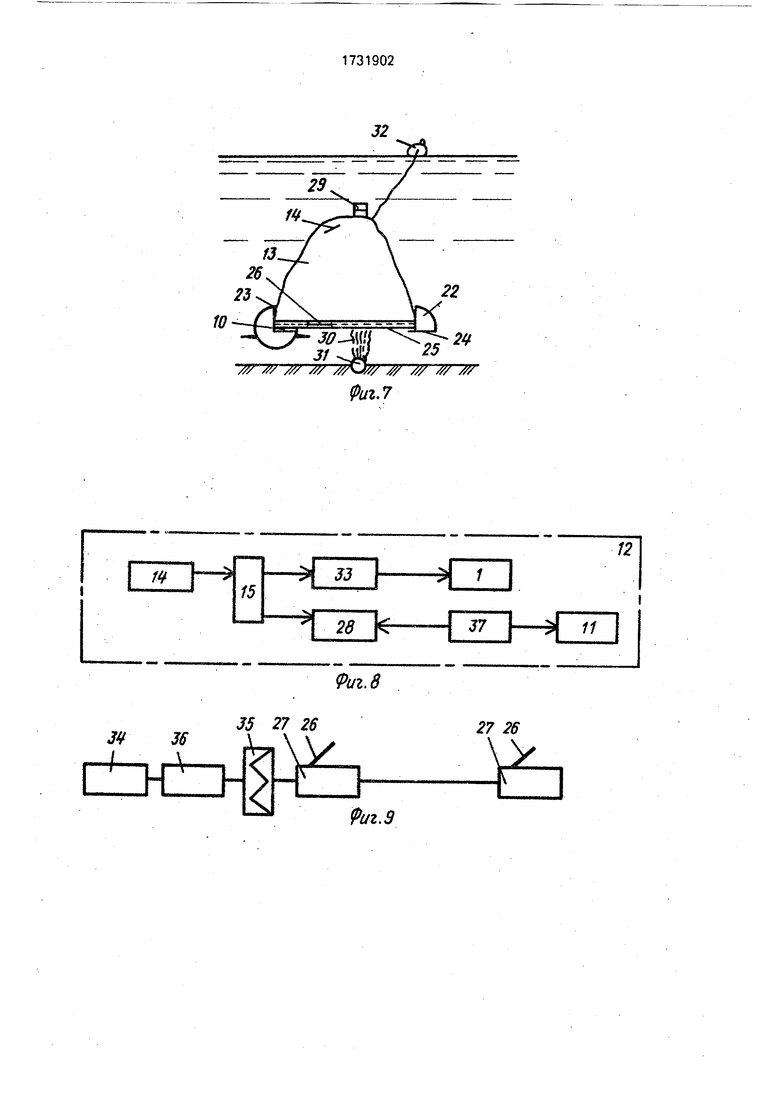
Нефтесборныйузел 3 находится в верхней части корпуса аппарата (фиг.6,7) и содержит емкость 13, изготовленную из эластичного материала, которая в сложенном состоянии размещена в специальном отсеке23, перекрываемом крышкой 22, причем крышка 22 фиксируется на корпусе с
помощью электромагнитной защелки 10, выполненной, например, в виде электромагнита с подвижным сердечником, который входит во взаимодействие с выступами 24
на крышке 22, Крышка 22 отделяется от корпуса аппарата посредством упругих линейных элементов переменной длины 25, выполненных, например, в виде подпружиненных телескопических штанг или много0 слойных пластинчатых пружин и снабженных тросами 26, которые находятся внутри указанных элементов 25. Тросы 26 одними концами закреплены на отделяющейся крышке 22, другими - на барабанах
5 27 с передачей от двигателя 34, входящих в состав исполнительного механизма 28 закрытия крышки. Нефтесборная емкость 13 выполнена в виде мешка, горловина которого в плане имеет вид прямоугольника, про0 тивоположные стороны которого закреплены на внутренней стенке корпуса и крышке 22, и соответственно, на элементах переменной длины 26. В верхней части емкости 13 имеется отверстие, перекрываемое
5 заглушкой 29, которое предназначено для соединения емкости 13 с шлангом для перекачивания собранной нефти на нефтеналивные суда после локализации вытекающей нефти 30 из трубопровода 31. Здесь же за0 креплен сигнальный поплавок 32. В верхней части мешка 13 закреплен датчик 14 заполнения емкости, связанный с узлом управления аппаратом с заполненной емкостью 12 (фиг.8), который представляет собой не5 прочный токопроводящий элемент, имеющий длину меньше, чем расстояние между точками его закрепления (на емкости 13 в заполненном состоянии). Датчик 14 подключен к источнику питания и через реле 33
0 времени связан с ходовым двигателем 1, а через электромагнитное реле 15 - с исполнительным механизмом 28 закрытия крышки, состоящим из (фиг.9) электродвигателя 36, барабанов 27 для намотки троса и кон5 цевого выключателя 37.
Устройство работает следующим образом.
При обнаружении по данным приборов или визуального наблюдения утечек нефте0 продутое из аварийных трубопроводов, в необходимом направлении и в непосредственной близости производится пуск плавучего нефтесборщика либо с морской платформы или судна, либо с береговой ба5 зы. Во время движения аппарата необходимое расстояние от трубопровода поддерживается благодаря работе узла 4 управления движением аппарата, изменяющего положение выходного патрубка 17 ходового двигателя 1, Управляющий сигнал в
узел 4 поступает от индукционных датчиков 5 к исполнительному механизму 16 и регулируется его величиной. При этом, работа электрического исполнительного механизма 16 осуществляется путем преобразования реверсивно-вращательного движения гайки-шестерни 19, жестко связанной через редуктор 20 с двигателем 21, а возвратно- поступательное движение ходового винта 18, отклоняющего поворотно-выходной патрубок 17, чем достигается корректировка траектории движения аппарата в зависимости от показаний датчиков 5, причем движение аппарата осуществляется всегда на определенном расстоянии от линии трубопровода, вне зависимости от глубины его прокладки и направления.
При попадании загрязненной воды в датчик 9 поступает сигнал на электромагнитное реле 15, которое переключает группу контактов: отключает ходовой двигатель 1. втягивается подвижной сердечник электромагнитной защелки 10, удерживающий крышку 22 отсека 23, и включается генератор 11 внешнего электромагнитного поля, предназначенный для остановки ходовых двигателей других подобных аппаратов в зоне действия нефтесборщика по показаниям датчика 7 электромагнитных сигналов, установленных в этих аппаратах, предотв- оащая их столкновение.
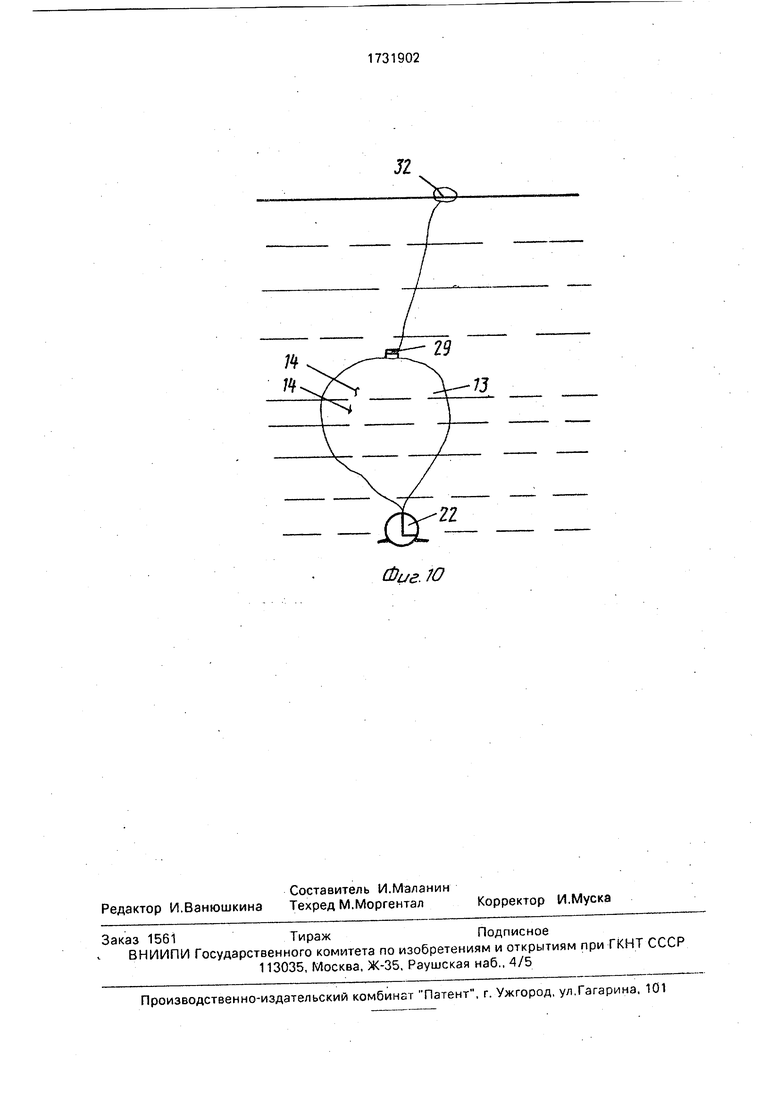
Аппарат зависает над местом утечки, и крышка 22 с закрепленным на ней одним из краев горловины нефтесборной емкости 13 отделяется от корпуса в горизонтальном направлении за счет работы сил, стремящихся восстановить полную длину упругих элементов 25, на расстояние, предусмотренное длиной этих элементов, раскрывая тем самым горловину емкости 13 над местом утечки. При отделении крышки 22 из отсека 23 освобождается поплавок 32, всплывающий над местом утечки. Аппарат начинает плавно спускаться на нефтепровод и дно, пере- крывая место утечки и обеспечивая фиксацию здесь нефтесборного узла 3. Сам аппарат и крышка 22 имеют приблизительно равный вес, что достаточно для удержания горловины эластичной емкости 13 над местом утечки в течение всего периода ее заполнения. За счет разницы в удельном весе нефтепродуктов и воды вытекающая жидкость заполняет емкость 13, поднимаясь вертикально вверх. При этом емкость 13 приобретает шарообразную форму, ее стенки полностью расправляются, и нефтесборщик всплывает над трубопроводом. Датчик 14, закрепленный в верхней части емкости 13 и соединенный через электромагнитное реле 15 с исполнительным механизмом 28
закрытия крышки и через реле 33 времени с ходовым двигателем 1, разрывается, и цепь его размыкается (фиг. 8).
При этом замыкаются контакты на реле 5 15, включая исполнительный механизм 28 закрытия крышки с концевым выключателем 37 и реле 33 времени, через которое включается ходовой двигатель 1. При включении механизма 28 закрытия крышки (фиг. 10 9) замыкается электромагнитная муфта 35, через которую передается вращение от двигателя 34 через редуктор 36 нг барабаны 27 для сматывания тросов 26 в элементах переменной длины 25. и происходит подтягива5 ние отделившейся крышки 22 к корпусу аппарата. После полной выборки тросов 26 упругие элементы 25 полностью складываются, при этом срабатывает электромагнитная защелка 10, фиксирующая крышку 22 и
0 концевой выключатель 37, отключающий механизм 28 закрытия крышки. Крышка 22, зафиксированная на корпусе, закрывает отсек 23 и зажимает горловину эластичного мешка 13, предотвращая утечку собранных
5 нефтепродуктов (фиг. 10).
Ходовой двигатель 1 включается через тот промежуток времени, который необходим для полного закрытия крышки 22, и выключается через определенный отрезок
0 времени, необходимый на отвод аппарата с места утечки на расстояние, безопасное для работы других аппаратов. Одновременно с включением ходового двигателя 1 отключается генератор 11, позволяя другим аппара5 там занять позицию над местом утечки.
Объем нефтепродуктов при аварии трубопроводов сравнительно невелик и равен объему того участка трубопровода, который автоматически отсекается с двух сторон за0 движками по сигналу о его повреждении, поэтому расчетный объем емкости 13 подводного аппарата может быгь достаточным для полного сбора вытекающей нефти. При невозможности ограничить объем утечки
5 аппараты могут заменяться до тех пор, пока не установятся благоприятные условия на- вигации, когда смогут использоваться традиционные средства ликвидации аварий (суда, водолазы и т.д).
0После прекращения шторма собранная
нефть перекачивается на специальные нефтеналивные суда через отверстие в верхней части емкости, а аппараты поднимаются на суда для подготовки к повторному исполь5 зованию.
Применение предлагаемого технического решения обеспечивает возможность использования в любых погодных условиях и особенно в штормовых условиях, когда использование других очищающих средств невозможно,
чысокий экологический эффект вследствие оперативной локализации утечек аварийных трубопроводов сразу же после поступления сигнала об аварии, а также локализацию утечки на значительном удалении от места пуска нефтесборщика и непосредственно под водой в месте разрыва трубопровода.
Формула изобретения 1. Подводный нефтесборщик для локализации утечек из нефтепроводов, содержащий корпус обтекаемой формы, в котором размеа еи нефтесборочный узел, ходовой двигатель с узлами управления, а также связанный с нимм источник питания, отличающийся тем, чго, с целью расширения технологических возможностей нефтесборщика, он снабжен двумя индукционными датчиками, датчиком наличия нефти в воде, датчиком заполнения емкости и системой управления, причем корпус выполнен секп С лга ЕМ
Фиъ.2
ционным, а секции связаны посредством элементов переменной длины, имеющих соответствующие исполнительные механизмы и электромагнитную защелку, при этом
нефтесборочный узел выполнен в виде емкости из эластичного материала с расположенной в ее верхней части заглушкой, а выходы всех датчиков связаны с соответствующими входами системы управления, выходы которой подключены к входам узлов управления ходовым двигателем, исполнительному механизму элементов переменной длины и электромагнитной защелки.
внешнего электромагнитного поля, управляющий вход которого подключен к соответствующему выходу системы управления.
связанным с емкостью из эластичного материала посредством гибкой связи.
i
16
17 20 21
Риг.З
15
Ш d
Фиг А
1
Фиг. 5
22 2
Риг. 6
9Z tf
Zl
e
Ь гпф
///////// /// /pry // ////////////
6 Щ
л
9Z LZ fff
9 гпй
j ЈЈ
SI
v.
ZЈ
206IGil
J2
Vv
Фиг. 7O
| С-.СЕСОЮЗНАЯ I ПДТ^Й.КО-11.ЛЙГ:[СН^^4 | 0 |
|
SU368461A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
