сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Аттенюатор | 1986 |
|
SU1443130A1 |
| Управляемый П-образный аттенюатор | 1989 |
|
SU1626330A1 |
| АМПЛИТУДНЫЙ КОРРЕКТОР | 2010 |
|
RU2439754C1 |
| ГЕНЕРАТОР ДЛЯ УЛЬТРАЗВУКОВОГО ПРЕОБРАЗОВАТЕЛЯ | 2002 |
|
RU2237357C2 |
| АВТОГЕНЕРАТОР | 2009 |
|
RU2394356C1 |
| ГЕНЕРАТОР | 2016 |
|
RU2619714C1 |
| Широкополосный управляемый аттенюатор | 1987 |
|
SU1555817A1 |
| ПРЕЦИЗИОННЫЙ АНАЛОГО-ЦИФРОВОЙ ИНТЕРФЕЙС ДЛЯ РАБОТЫ С РЕЗИСТИВНЫМИ МИКРО- И НАНОСЕНСОРАМИ | 2013 |
|
RU2541723C1 |
| Устройство для контроля фазочастотных характеристик каналов связи | 1985 |
|
SU1394440A1 |
| АКТИВНЫЙ RC-ФАЗОВЫЙ КОНТУР | 1991 |
|
RU2019027C1 |
Изобретение предназначено для использования в многоканальных измерительных и радиоприемных устройствах, а также системах с повышенными требованиями к стабильности фазочастотных характеристик. Цель изобретения - уменьшение зависимости фазового сдвига от уровня вносимого ослабления. Эта цель достигается введением в аттенюатор Т-образного фильтра нижних частот, совмещенного в себе функции линии задержки и цепи, компенсирующей влияние на фазочастотную характеристику аттенюатора паразитных параметров элементов с управляемым сопротивлением. Управляемый аттенюатор содержит элементы г управляемым сопротивлением 1,2,3 и 4, резисторы 5 и 6, конденсатор 7, катушки индуктивности 8 и 9. 6 ил.
Изобретение относится к радиотехнике и может быть использовано в многоканальных измерительных и радиоприемных устройствах и системах с повышенными требованиями к стабильности фазочастотных характеристик.
Известны управляемые аттенюаторы, содержащие параллельно и последовательно включенные диоды. Недостатком этих аттенюаторов является большая величина изменения наклона фазочастотной характеристики (ФЧХ), возникающего при регулировке вносимого ослабления.
Известны управляемые аттенюаторы, содержащие параллельно и последовательно включенные управляемые и корректирующие элементы. Корректирующие элементы (конденсаторы и катушки индуктивности) в известных аттенюаторах позволяют в 2-3 раза уменьшить изменение наклона ФЧХ. Однако это уменьшение достигается в небольшом диапазоне вносимых ослаблений (6-7 дБ).
Наиболее близким к предлагаемому аттенюатору является управляемый аттенюатор, содержащий включенные последовательно между входом и выходом первый и второй элементы с управляемым сопротивлением, первый и второй резисторы, первые выводы которых подключены соответственно ко входу и выходу, третий и четвертый элементы с управляемым сопротивлением, первые выводы которых подключены к общей шине.
Положительными свойствами известного аттенюатора являются согласование по входу и выходу и относительно большой диапазон вносимых ослаблений. Однако недостатком этого аттенюатора является большая величин) изменения наклона ФЧХ в диапазоне вносимых ослаблений.
Сл
Ј
Целью изобретения является уменьшение зависимости фазового сдвига от вносимых ослаблений в широком диапазоне этих ослаблений.
Для достижения поставленной цели в управляемый аттенюатор, содержащий включенные последовательно между входом и выходом первый и второй элементы с управляемым сопротивлением, первый и второй резисторы, первые выводы которых подключены соответственно к входу и выходу, третий и четвертый элементы с управляемым сопротивлением, первые выводы которых подключены к общей шине, введен Т-образный фильтр нижних частот, состоящий из конденсатора и идентичных первой и второй катушек индуктивности, при этом конденсатор подключен к точке соединения первого и второго элементов с управляемым сопротивлением и общей шине, первые выводы и второй катушек индуктивности подключены к точке соединения первого и второго элементов с управляемым сопротивлением, а вторые их выводы соответственно соединены с вторыми выводами первого и второго резисторов и с вторыми выводами третьего и четвертого элементов с управляемым сопротивлением, причем величина емкости конденсатора с и индуктивности I первой и второй катушек индуктивности выбраны из соотношений U- г-2сч/4, И. с 2сь
гдест, И, г--соответственноемкость, индуктивность и сопротивление в закрытом состоянии первого элемента с управляемым сопротивлением.
Использование Т-образных фильтров нижних частот (ФНЧ) является известным. Их используют, например, в качестве согла- сующе-трансформирующих цепей в усилителях и других устройствах. В предложенном решении ФНЧ совмещает в себе дву функции: во-первых, является звеном задержки, связывающим параллельные и последовательные плечи аттенюатора; во- вторых, конденсатор и катушки индуктивности ФНЧ являются корректирующими элементами, то есть вносимый фильтром фазовый сдвиг равен по величине и противоположен по направлению изменению фазового сдвига аттенюатора, обусловленному влиянием паразитных реактивностей элементов с управляемым сопротивлением. Аналогичные решения авторам неизвестны. В связи с тем, что предложенное решение следует считать соответствующим критерию существенные отличия.
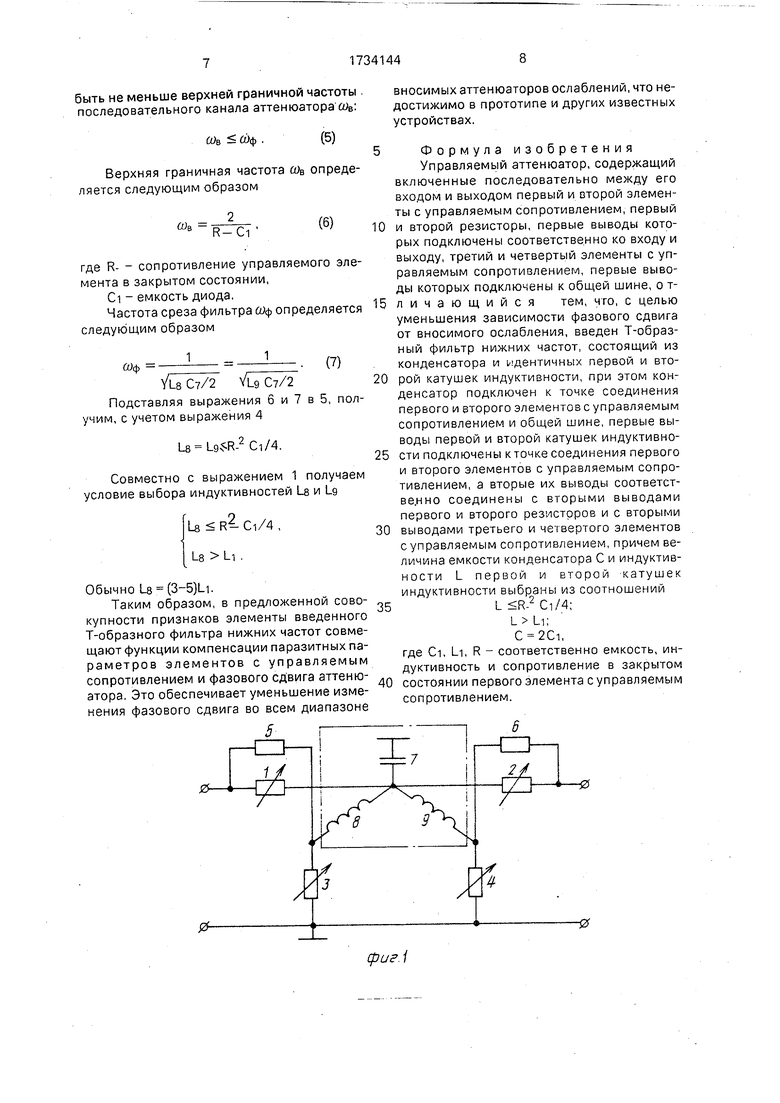
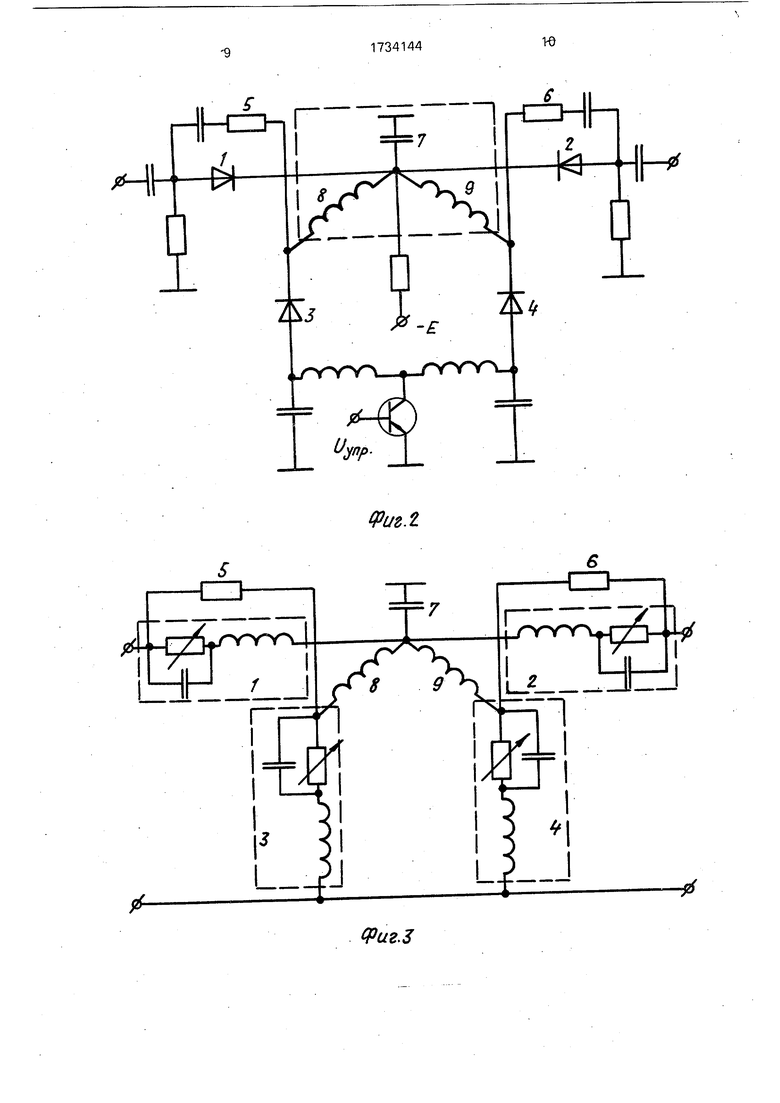
На фиг. 1 представлена принципиальная электрическая схема управляемого аттенюатора; на фиг. 2 - пример управляемого аттенюатора при использовании в нем p-i-n
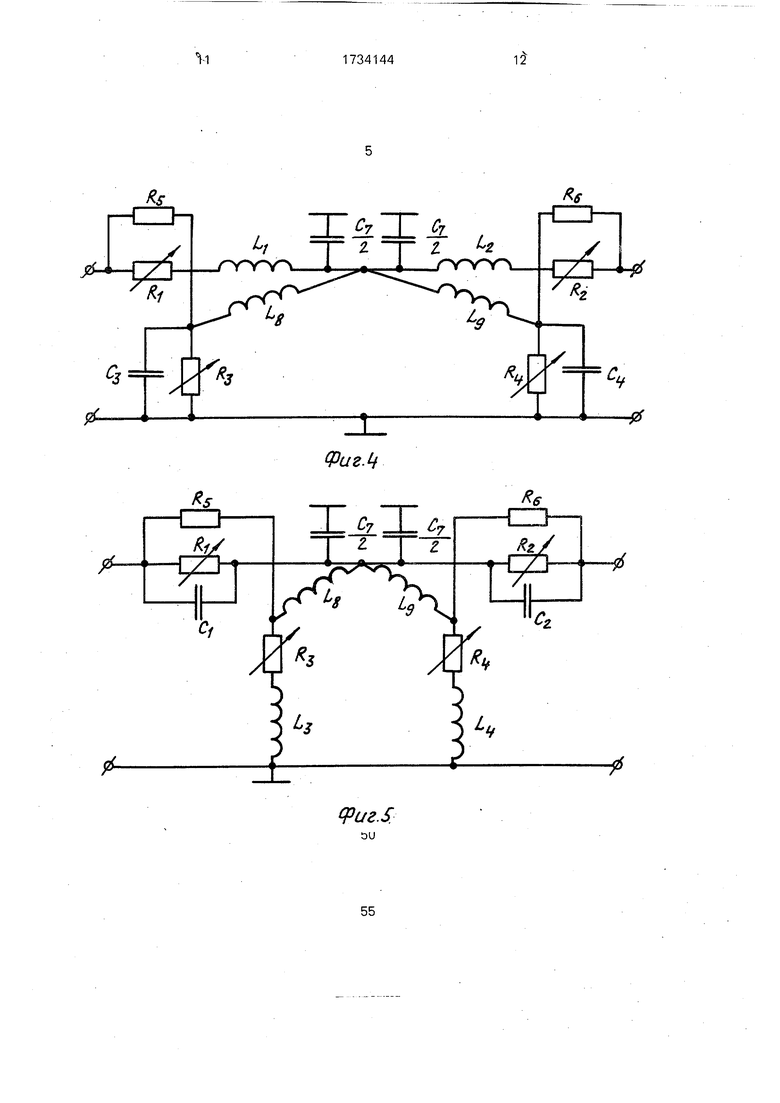
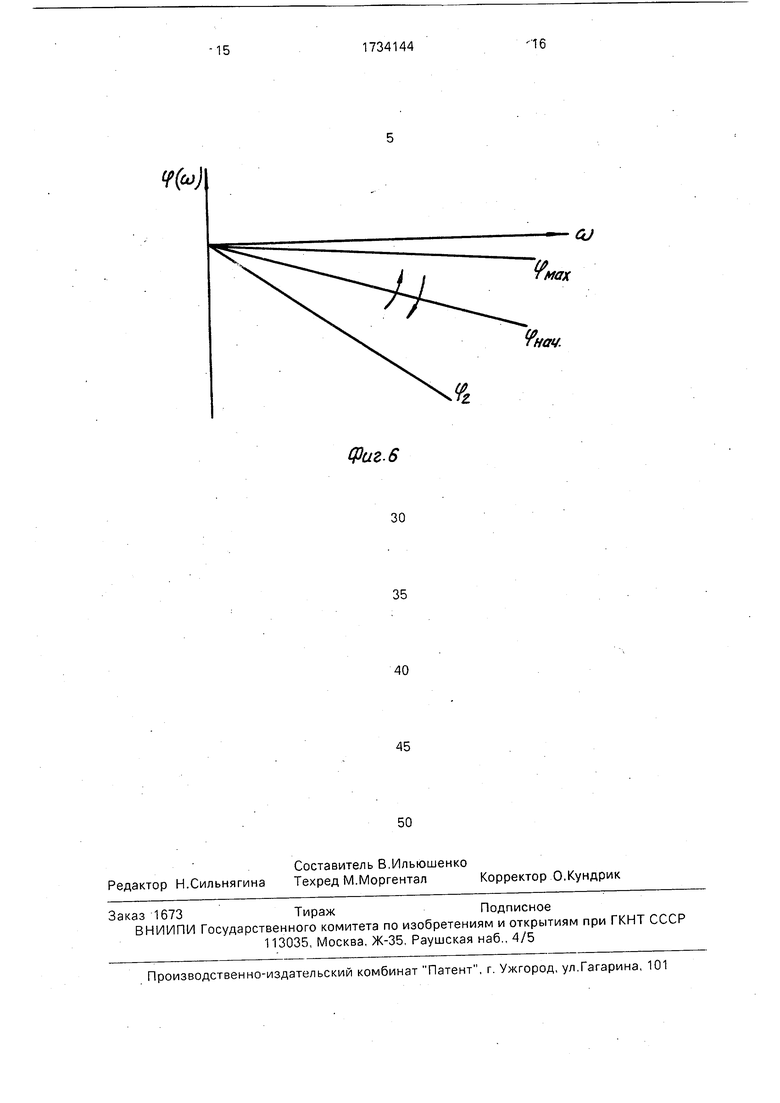
диодов в качестве элементов с управляемым сопротивлением (в аттенюаторе могут использоваться также переменные резисторы, оптроны, транзисторы в режиме управляемого сопротивления); на фиг. 3 эквивалентная схема предложенного аттенюатора с учетом паразитных параметров элементов с управляемым сопротивлением; на фиг. 4, 5 - эквивалентные схемы аттенюатора- в режимах минимального и максимального ослаблений соответственно; на фиг. 6 - фазовая характеристика передаточной функции аттенюатора.
Управляемый аттенюатор (фиг.З) содержит элементы с управляемым сопротивлением 1,2 и 3,4, резисторы 5 и 6, конденсатор 7, катушки 8,9 индуктивности.
Управляемый аттенюатор работает следующим образом. В режиме минимального ослабления сопротивления элементов 1 и 2
имеют наименьшие значения, а элементов 3 и 4 - наибольшие. По мере увеличения сопротивлений элементов 1 и 2 и уменьшения сопротивлений элементов 3 и 4 ослабление, вносимое аттенюатором, увеличивается.
Сопротивления резисторов 5 и 6 выбираются равными соответственно сопротивлениям источника сигнала и нагрузки, что обеспечивает согласование аттенюатора по входу и выходу в процессе регулирования
при соответствующем соотношении сопротивления элементов в последовательном и параллельном плечах.
Покажем, что предложенная схема управляемого аттенюатора отличается от известных малой зависимостью фазового сдвига от вносивого ослабления.
Фазовый сдвиг выходного сигнала аттенюатора относительно входного в диапазоне ослаблений определяется следующим
соотношением
Ay ( Zs , Zp , f )/( Zs mm , Zp max , f ) ( Zs max , Zp mm , f ) ,
где Zs, Zp - полные сопротивления элементов с управляемым сопротивлением соответственно в последовательном и параллельном плечах; индексы min и max 5 соответствуют минимальному и максимальному значениям резистивной составляющей полного сопротивления элемента с управляемым сопротивлением; f - частота. Из последнего выражения следует, что фазовый сдвиг в управляемом аттенюаторе
зависит от частоты, а также от уровня вносимого ослабления и определяется соотношениями между реактивной и резистивной составляющими полных сопротивлений управляемых элементов. Изменение фазового сдвига тем меньше, чем меньше отношение реактивной составляющей полного сопротивления управляемого элемента к резистивной. Уменьшение изменения фазового сдвига в предложенном устройстве достигается следующим образом.
Граничным значением (фиг. 4,5), определяющим переход от диапазона минимального ослабления ч максимальному является равенство характеристического сопротивления р элемента с управляемым сопротивлением его резистивной составляющей Rg, то есть
р Rg YLTc
где L и С - паразистные индуктивность и емкость элемента с управляемым сопротивлением. При Rg р характер полного сопро- тивления управляемого элемента индуктивный, а при Rg р - емкостной (фиг. 4,5). В диапазоне ослаблений 6-8 дБ введение конденсатора 7 и индуктивностей 3 и 9 приводит к образованию двул Г-образных звеньев ФНЧ LI, С 7/2 и , C7/2. При этом индуктивности La и Lg (фиг.4) включаются параллельно индуктивностям LI и L.2 соответственно через малые сопротивления RI + + Rs и R2 +Re, что повышает верхнюю граничную частоту аттенюатора, а это, в свою очередь, эквивалентно уменьшению изменения фазового сдвига при регулировании. Таким образом, вуказанном диапазоне ослаблений происходит компенсация паразитных индуктивностей диодов и .
При затуханиях больше 6-8 дБ причина уменьшения изменения фазового сдвига заключается в следующем. При минимальном ослаблении (фиг.4) сигнал от входа к выходу аттенюатора поступает по цепиРт, , С, L2, R2 и фазовая характеристика передаточной функции аттенюатора, определаяемая как отношение выходного напряжения к входному, изображена на фиг. 6 ( ). По мере увеличения затухания характер реактивного сопротивления последовательно включенных элементов с управляемым сопротивлением изменяется с индуктивного на емкостный, а параллельно включенных - с емкостного на индуктивный. В этом случае в известном аттенюаторе ( оо,) фазовая характеристика переместилась бы в положение тах (в сторону уменьшения величины фазового сдвига). Однако в данном
случае по мере увеличения затухания на его значение начинает влиять и второй путь передачи сигнала со входа на выход - Rg, Le, С, 1-9, Re, задержка сигнала по которому больше, чем по вышеописанному, так как
Yb Yti Cv/2
или
KUC7/2 Yl 2C7/2 ,
0)
поскольку задержка сигнала определяется по формуле
15
Тзэд VLC
Увеличение времени задержки сигнала приводит к увеличению фазового сдвига до значения (pi (фиг.6), так как
fOb
(р / Тзад d ft).
о
Таким образом, происходит компенсация фазового сдвига (ртах за счет (р2 и ФЧХ остается практически в первоначальном положении (рнач.
Определим, каким условиям должны удовлетворять элементы 7,8 и 9 для обеспечения минимума изменения фазового сдвига.
Для элементов с управляемым сопротивлением, используемых в аттенюаторах, обычно выполняется соотношение
(2)
Кроме того, для обеспечения согласования в схеме для последовательного канала передачи сигнала должно выполняться равенство
С7/2 Z0(3)
Сравнивая выражения 2 и 3, получим
2Li/C Li/Ci Откуда
C 2Ci,(4)
что также следует и из условия минимальности фазового сдвига.
Индуктивности фильтра LS и Lg должны выбираться так, чтобы не ограничивать полосу рабочих частот аттенюатора. Для этого частота среза С0ф фильтра Ls Lg С должна
быть не меньше верхней граничной частоты последовательного канала аттенюатора Шв
шй щ .
(5)
Верхняя граничная частота а)в определяется следующим образом
сов
R-C-i
(6)
где R- - сопротивление управляемого элемента в закрытом состоянии,
Ci - емкость диода.
Частота среза фильтра определяется следующим образом
щ
1
1
(7)
VLs С7/2 Су/2 Подставляя выражения 6 и 7 в 5, получим, с учетом выражения 4
U L9fR-2Ci/4.
Совместно с выражением 1 получаем условие выбора индуктивностей Le и Lg
u R-Ci/4, L8 Li .
Обычно U (3-5)Li.
Таким образом, в предложенной совокупности признаков элементы введенного Т-образного фильтра нижних частот совмещают функции компенсации паразитных параметров элементов с управляемым сопротивлением и фазового сдвига аттенюатора. Это обеспечивает уменьшение изменения фазового сдвига во всем диапазоне
5
вносимых аттенюаторов ослаблений, что недостижимо в прототипе и других известных устройствах.
Формула изобретения
Управляемый аттенюатор, содержащий включенные последовательно между его входом и выходом первый и второй элементы с управляемым сопротивлением,первый
и второй резисторы, первые выводы которых подключены соответственно ко входу и выходу, третий и четвертый элементы с управляемым сопротивлением, первые выводы которых подключены к общей шине, о тличающийся тем, чго, с целью уменьшения зависимости фазового сдвига от вносимого ослабления, введен Т-образный фильтр нижних частот, состоящий из конденсатора и идентичных первой и второй катушек индуктивности, при этом конденсатор подключен к точке соединения первого и второго элементов с управляемым сопротивлением и общей шине, первые выводы первой и второй катушек индуктивности подключены к точке соединения первого и второго элементов с управляемым сопротивлением, а вторые их выводы соответст- ве.нно соединены с вторыми выводами первого и второго резисторов и с вторыми
выводами третьего и четвертого элементов с управляемым сопротивлением, причем величина емкости конденсатора С и индуктив- ности L первой и второй катушек индуктивности выбраны из соотношений
L R-2Ci/4;
L Li; C 2Ci,
где Ci, Li, R - соответственно емкость, индуктивность и сопротивление в закрытом
состоянии первого элемента с управляемым сопротивлением.
0
(риг 1
s CZh
HI
Ј
Ж JL «
, .
V J
лАп ти«MraLi ммЬ
Ј
ь
.Ј
e.J
Фиг.
R5
фиг-S.
аи
i
Я
HW.
Фиг. 6
| Крылов Г.М | |||
| и др | |||
| Управляемые аттенюаторы | |||
| М,: Радио и связь, 1985, с.74-76 | |||
| УПРАВЛЯЕМЫЙ АТТЕНЮАТОР | 0 |
|
SU296182A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
