Известные реверсивные бесконтактные тахогенераторы постоянного тока выполняются на основе двухфазной синхронной машины и внешней выпрямительной схемы, содержащей много различных элементов, что делает эти устройства громоздкими и сказывается на надежности их .работы.
Описываемый тахогенератор отличается тем, что для повышения надежности и обеспечения компактности он выполнен в виде двух тахогенераторов переменного тока на одном валу в общем корпусе, с внешней выпрямительной схемой на двух диодах.
В качестве тахогенераторов переменного тока используются синхронные тахогенераторы с возбуждением от постоя;нных магнитов, у которых число пар полюсов одной машины в два раза больше, чем у другой, а статорные обмотки сдвинуты в пространстве на 45° и состоят каждая «з двух частей, включенных в в разные плечи выпрямительного моста указанной внешней схемы.
Для уменьшения момента инерции вращающихся частей и момента сопротивления в качестве тахогенераторов переменного тока используются асинхронный тахогенератор с полым ротором и синхронный тахогенератор с возбуждением от постоянных магнитов и двумя однофазными обмотками на статоре, одна из которых питает обмотку возбуждения асинхронного тахогенератора, а другая является датчиком сигнального (выпрямляемого) напряжения.
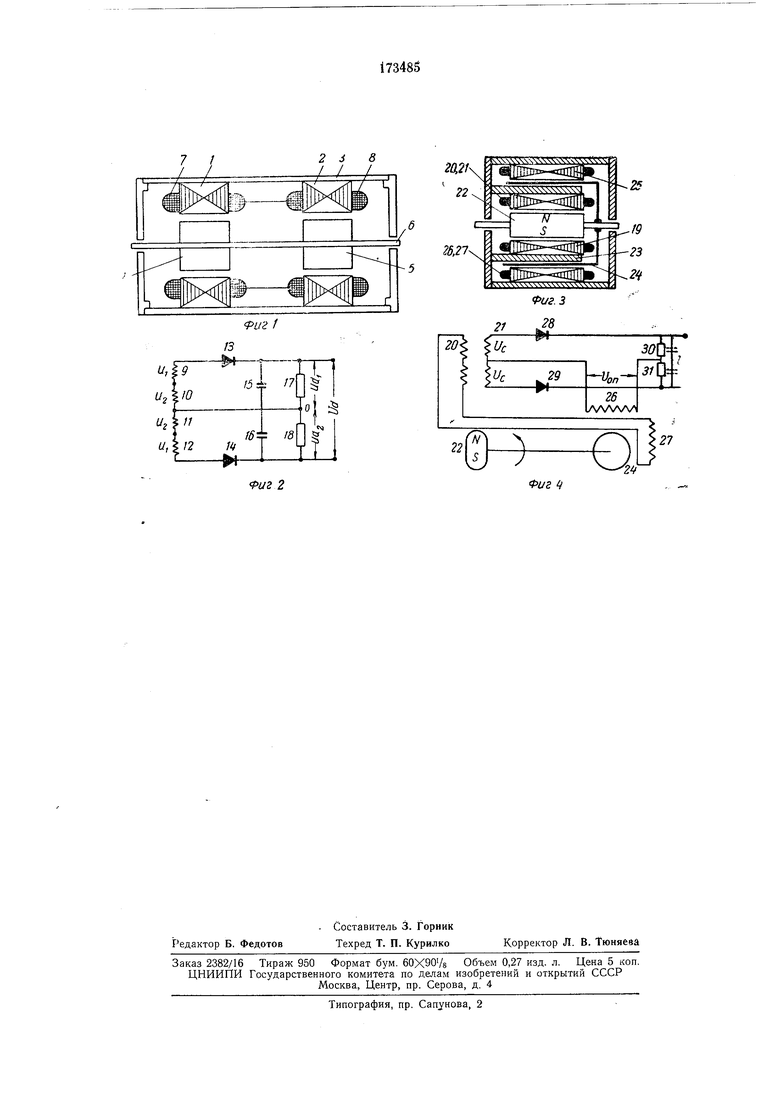
На фиг. 1 схематично изображен тахогенератор на основе двух обычных однофазных синхронных генераторов, статоры которых ,/ и 2 расположены в общем корпусе 3. Роторы 4 И 5 из постоянных .магнитов насажены на общий вал 6. Ротор 4 и обмотка 7 первого генератора имеют число пар полюсов 2р 2, а ротор 5 и обмотка 8 второго генератора 2р 4. Оси ОбМоток 7 и 8 смещены в пространстве на угол 45°.
Каждая ИЗ обмоток состоит из двух частей с одинаковым числом витков. Схема включения отдельных частей обмоток обоих генераторов с внешним выпрямляющим устройством показана на фиг. 2. Обмотки 9 vi 12 принадлежат машиие, имеющей 2р 2, а обмотки 10 и // - машине, у которой 2р 4. В обмотках 9 и 12 индуктируются равные напряжения Ui, основной частоты fi, а в обмотках W и 11 - равные напрял- :ения Uz частоты .
При постоянстве магнитных потоков и холостом ходе максимальные значения напряжения t/iOT и t/2m пропорциональны скорости вращения. Обмотки 9 и 10 образуют одно плечо схемы, обмотки 11 н 12 - другое .плечо.
и равных сопротивлений /7 и 18 Q качестве сглаживающих фильтров.
Диод 13 врОБОДит ток в течениеположительной части цикла напряжения t/ t/i-{- 2 (суммарное напряжение «аждого плеча), диод 14 - в течение отрицательной части.
Если напряжение IJ, приложенБое к диоду 13, положительно, диод проводит ток и кондвн1сатор 15 заряжается от источника п-итающего напряжения. Когда напряжение И начнет уменьшаться, конденсатор начнет разряжаться на соцротивление 17. Другое плечо схемы работает таким же образом.
Средние напряжения на плечах схемы будут различны. Напряжение на выходе схемы
Ш Vdi - Шг,
где - среднее напряжение на одном плече схемы; Ud2 - TO же, на другом плече -схемы.
При заданной скорости вращения я и определенных емкостях .и сопротивлениях напряжения Udi м Uds будут зависеть соответственно от мак1симальных значений положительных д отрицательных полуволн напряжения Ulf и iJsmi что определяется направлением вращения ротора.
Когда изменяется направление вращения, при неизменной скорости, меняется только полярность Ud.
На фиг. 3 схематично изображен тахогенератор на основе синхронного и асинхронного тахогенераторов; на фиг. 4 представлена его электрическая схема. Асинхронный тахогенератор является датчиком опорного напряжения постоянной фазы U „„, синхронный -- датчиком сигнального напряжения 6.
Статор 19 синхронного генератора с двумя однофазными обмотками 20 и 21 и ротором 22 из постоянных магнитов расположен внутри внутреннего статора 23 асинхронного тахогенератора. Полый немагнитный ротор 24 асинхронного тахогенератора находится на одном валу с ротором синхронного тахогенератора. В наружном статоре 25 расположены обмотки 26 и 27 асинхронного тахогенератора. Обмотка 21 синхронного тахогенератора (фиг. 4) является источником сигнального напряжения f/c, а обмотка 26 асинхронного тахогенератора -опорного напряжения Ug.
Обмотка возбуждения 27 асинхронного тахогенератора получает питание от обмотви 20 синхронного тахогенератора.
Известно, что у асинхронного тахогенератора напряжения обмоток возбуждения и выходной имеют одинаковую частоту, равную частоте об.мотки возбуждения. Следовательно, в данном случае напряжения U и U о„ имеют
f РП
одинаковую частоту / -, где.р - число пар
60
полюсов синхронного тахогенератора, п - скорость вращения.
Фаза напряжения И обмотки 26 с изменением направления вращения остается неизменной, так как одновременно изменяется на 180° фаза напряжения обмотки 20 синхронного тахогенератора, а следовательно, и обмотки 27 асинхронного, и ротор вращается в обратном направлении.
Можно сказать, что асинхронный тахогенератор является в данной схеме датчиком опорного напряжения Uд„. Выпрямительная схема включает диоды 28 и 29, равные сопротивления 30 и 31 и обмотки 21 и 26 синхронного и
асинхронного тахогенераторов. Напряжение и с обмотки 21 при постоянстве магнитного потока возбуждения синхронного тахогенератора пропорционально частоте, т. е. скорости вращения ротора U п. Если при всех скоростях вращения Ug 21/ (устанавливается расчетом устройства), то величина выпрямленного выходного напряжения на выходе схемы будет изменяться -пропорционально скорости вращения.
Предмет изобретения
1. Реверсивный бесконтактный тахогенератор постоянного тока, отличающийся тем, что, с целью увеличения надежности и обеспечения компактности, он выполнен в виде двух тахогенераторов переменного тока, расположенных на одном валу в общем корпусе, с выпрямлением переменного напряжения, осуществляемым внещней выпрямительной схемой на двух диодах.
2.Тахогенератор по п. 1, отличающийся тем, что в качестве тахогенераторов переменного
тока используются синхронные тахогенераторы с возбуждением от постоянных магнитов, у .которых число пар полюсов одной машины в два раза больще, чем у другой, а статорные обмотки сдвинуты в пространстве на 45° и состоят каждая из двух частей, включенных в разные плечи выпрямительного моста указанной внещней схемы.
3.Тахогенератор по п. 1, отличающийся тем, что, с целью уменьщения момента инерции вращающихся частей и момента сопротивления, в качестве тахогенераторов переменного тока используются асинхронный тахогенератор с полым ротором и синхронный тахогенератор с возбуждением от постоянных магнитов и двумя однофазными обмотками на статоре, одна из которых питает обмотку возбуждения асинхронного тахогенератора, а другая является датчиком сигнального (выпрямляемого) напряжения.
риг f
25
26.27
|Г11РР --«дЩШ1||
.З 28
21
и,
21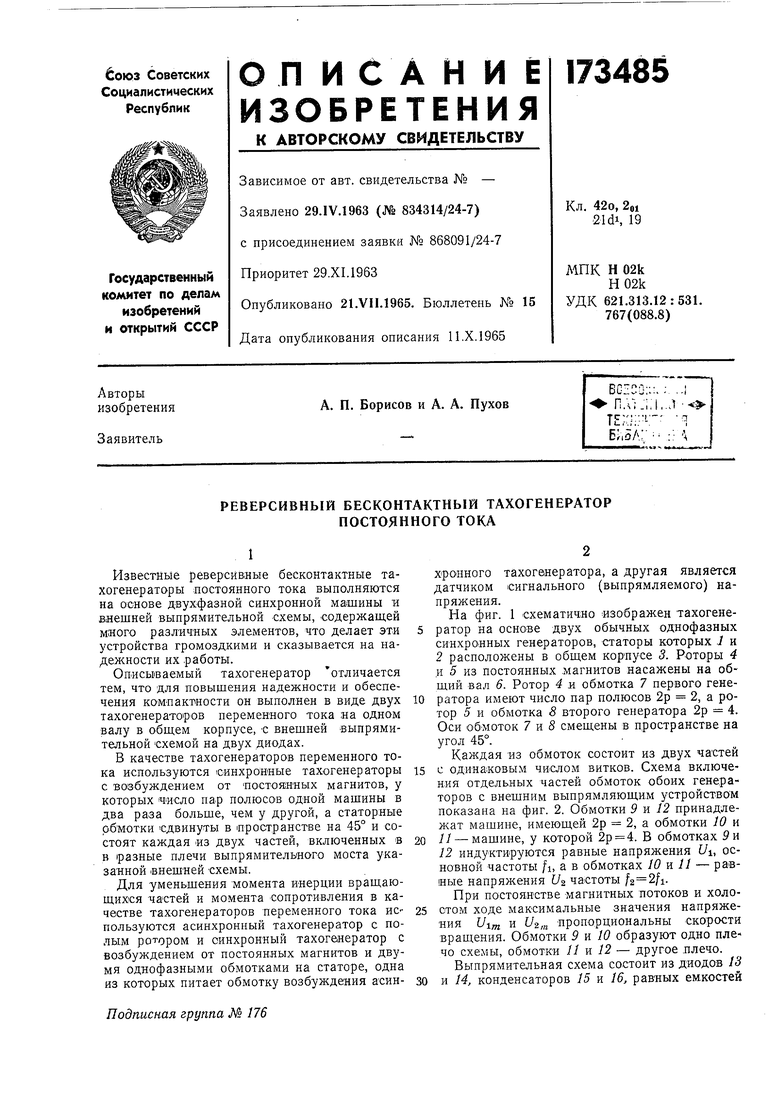
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСИАЛЬНЫЙ УПРАВЛЯЕМЫЙ БЕСКОНТАКТНЫЙ ДВИГАТЕЛЬ-ГЕНЕРАТОР | 2015 |
|
RU2601952C1 |
| Способ изготовления усовершенствованной магнитоэлектрической машины | 2017 |
|
RU2667661C1 |
| Реверсивный бесконтактный тахогенератор постоянного тока | 1974 |
|
SU539358A1 |
| Реверсивный бесконтактный тахогенератор постоянного тока и способ его настройки | 1988 |
|
SU1557642A1 |
| Источник автономного электроснабжения постоянным током | 1976 |
|
SU657518A1 |
| СПОСОБ ПОЛУЧЕНИЯ ПОВЫШЕННОГО ВЫХОДНОГО НАПРЯЖЕНИЯ | 2016 |
|
RU2632817C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2247039C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| Одномашинный преобразователь частоты | 1981 |
|
SU966820A1 |
| СПОСОБ ПУСКА И БЕСЩЕТОЧНОГО ВОЗБУЖДЕНИЯ БЕСКОНТАКТНОЙ СИНХРОННОЙ МАШИНЫ | 2012 |
|
RU2498491C2 |