1. Система управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА).
Система управления относится к области авиационной техники и может быть использована в области винтокрылых летательных аппаратов с использованием системы привода винта, в частности гибридных БПЛА, а также для распределения и управления энергией винтокрылого летательного аппарата.
Система управления и передачи вращательного момента на винт (ы) предназначена преимущественно для дронов, самолетного типа и вертолетного типов, в том числе для БПЛА с несколькими винтами, например, квадракоптеров.
Известно изобретение «Стартер генератор с дифференциальным электроприводом и способ управления стартер-генератором», патент RU2 711 097, опубл.15.01.2020, МПК H02P 9/04 F02N 11/14, B60W 10/06, включающий синхронную реактивную машину, дифференциальный редуктор, электрически связанный с системой управления и с источником питания бортовой сети, узел задания режимов работы стартер генератора, двухканальную систему управления преобразователя; Вал механически соединен с валом синхронной реактивной машины, а другой вал соединен с коленчатым валом двигателя внутреннего сгорания, и синхронная реактивная машина подключена к преобразователю, системе управления и к узлу задания режимов работы. Позволяет увеличить пусковой момент на валу ДВС при помощи устройства стартера-генератора без увеличения числа элементов аккумуляторной батареи и повысить безотказность пуска ДВС. Однако при этом применение карданной передачи утяжеляет корпус и снижает надежность аппарата. Кроме того, не реализованы регулировочные возможности стартера - генератора в совокупности с системой управления. Не обеспечивает перезапуск двигателя при перебоях в его работе без прерывания в процессе полета дрона.
Известно изобретение «Способ поддержания числа оборотов несущего винта вертолета в допустимых пределах и устройство для его реализации», патент RU2 231 479, опубл.27.06.2004, МПК B64C 27/57 G05D 13/00, при котором осуществляют контроль за числом оборотов винта, управление потребной мощностью, воздействуют на шаг винта и вводят автоматическое дополнительное изменение общего шага. При этом снабжен рычагом общего шага, проводкой управления, гидроусилителем, автоматом перекоса, устройством соединения вала двигателя с валом несущего винта и снабжен тахогенератором, а вычислитель (контроллер) соединен с тахогенератором и переключателем перенастройки оборотов винта и преобразователем электрического сигнала в механическое перемещение. Позволяет обеспечить автоматическое поддержание оборотов несущего винта вертолета в допустимых пределах при выполнении интенсивных маневров. Однако используется в другом классе летательных машин, для мощных вертолетов, имеет сложную и многозвенную систему, карданную передачу, автомат перекоса и другие составные части системы утяжеляют корпус и снижают надежность. Кроме того, устройство не предназначено для БПЛА. Хорошо стабилизируют обороты несущего винта на режимах плавного изменения параметров полета, но для выполнения маневров, точность стабилизации оборотов неудовлетворительна и имеют место большие изменения числа оборотов несущего винта, что не допустимо для дронов. Не позволяет обеспечить перезапуск двигателя при перебоях в его работе без прерывания полета дрона.
Наиболее близким техническим решением к предлагаемой системе является изобретение «Способ распределения и управления энергией винтокрылого летательного аппарата с гибридной системой привода винта», патент RU2 694 695, опубл.16.07.2019, МПК B64C 27/12 B64D 35/08, летательный аппарат выполнен в виде летательного аппарата с гибридной системой привода винта, содержащего несущий винт, двигатель, электрический стартер-генератор, интеллектуальную систему управления гибридной системы привода винта, бортовой аккумулятор, работающий в режимах: подачи суммарной мощности от основного двигателя и электрического стартер-генератора, переключения стартера - генератора на режим генерирования электроэнергии от редуктора, приводимого во вращение двигателем для подзарядки аккумулятора, переключение стартера-генератора на режим генерирования электроэнергии от редуктора, обеспечивая рекуперацию энергии и подзарядку аккумулятора при уменьшении частоты вращения винтов до заданного уровня, переключение стартера -генератора на режим генерирования электроэнергии для увеличения сопротивления вращению несущего винта. Позволяет повысить эффективность управления потоками мощности/энергии на различных этапах полета по заданным алгоритмам от аккумулятора к стартер-генератору и от стартер-генератора в аккумулятор от стартера-генератора. Однако требует дополнительных затрат по мощности на привод генератора и редуктор. Применение карданной передачи утяжеляет корпус и снижает надежность аппарата. Не выполняет задачу перезапуска двигателя при перебоях в его работе. Кроме того, не позволяет обеспечить бесперебойную передачу вращательного момента на винт(ы) дрона и применить схему передачи вращательного момента в совокупности с поршневым, турбовальным или иным основным двигателем.
Для маневренных и мощных БПЛА в настоящее время требуется обеспечить оптимальное управление запасами мощности/энергии на разных режимах полета для различных видов БПЛА с однодвигательными и многодвигательными силовыми установками. А также повысить эффективность управления потоками мощности/энергии на различных этапах полета по заданным алгоритмам от аккумулятора к стартер-генератору и от стартер-генератора в аккумулятор, а также от стартер-генератора потребителям.
Для этого принимаются специальные меры, чтобы не допустить в полете выхода числа оборотов несущего винта за определенный минимум или остановки винта, а при перебоях работы двигателя снова запустить работу винта.
В случае вывода из режима раскрутки путем увеличения общего шага и уменьшения угла тангажа потребная мощность быстро возрастает, а располагаемая мощность будет нарастать заметно медленнее. Требуется улучшить надежность запуска двигателя при перебоях систем питания, на переходных режимах полета, при воздействии внешних факторов. Однако в известных конструкциях дронов существуют ограничения по динамике двигателя при маневрированиях, что ведет к перебоям в работе вплоть до полной остановки двигателя.
Предлагаемая система позволяет обеспечить следующий технический результат:
- обеспечить бесперебойную передачу вращательного момента на винт(ы) дрона и применить схему передачи вращательного момента в совокупности с поршневым, турбовальным или иным основным двигателем;
- обеспечить перезапуск двигателя при перебоях в его работе без прерывания полета дрона, а, следовательно, существенно улучшить эксплуатационные характеристики, ведущие к увеличению продолжительности и дальности полета дрона.
- существенно уменьшить общую массу дронов за счет отказа от трансмиссии и уменьшения массогабаритных характеристик пускового агрегата ДВС.
Данный технический результат достигается за счет того, что система управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА), включает амортизатор для крепления системы на фюзеляж, двигатель, стартер — генератор, воздушный винт и плату управления стартером генератором, осуществляющую переключение режимов работы стартера генератора с режима запуска двигателя на режим генерирования электроэнергии соответственно. В качестве двигателя может быть взят как двигатель внутреннего сгорания, так и газотурбинный двигатель, а также электрический.
Новым в предложенном техническом решении является то, что в качестве стартера-генератора используют бесколлекторный синхронный электродвигатель (БСЭ) с постоянными магнитами на роторе, размещенный на валу двигателя, который соединен шпоночным соединением с ротором стартер-генератора для передачи вращающего момента на воздушный винт. Вал двигателя размещен внутри статора стартер-генератора. Стартер-генератор содержит статор с электромагнитными катушками и ротор с постоянными магнитами, который работает в двух режимах: как стартера для двигателя, так и генератора для подзарядки аккумуляторов. Стартер-генератор снабжен корпусом ротора и корпусом статора. Корпус ротора жестко соединен с воздушным винтом через штифты, а корпус статора жестко соединен с корпусом двигателя. Воздушный винт закреплен на валу двигателя гайкой-втулкой через кок обтекатель воздушного винта и жестко соединен с корпусом ротора посредством штифтов. Стартер — генератор дополнительно снабжен датчиками положения ротора с электромагнитными катушками, расположенными относительно обмоток статора. При этом датчики являются датчиками Холла в количестве, по меньшей мере, 3 (трех) датчиков, размещенных на корпусе статора и электрически соединены с платой управления стартер-генератором, а система управления и передачи вращательного момента на винт, включая корпус двигателя, совместно со стартер-генератором и воздушным винтом закреплена на мотораме с размещенным на ней амортизатором, которая (моторама) снабжена фланцем с узлами крепления на фюзеляже.
Предложенная конструкция иллюстрируется чертежами, которые не охватывают всех модификаций сборки и видов крепежных элементов.
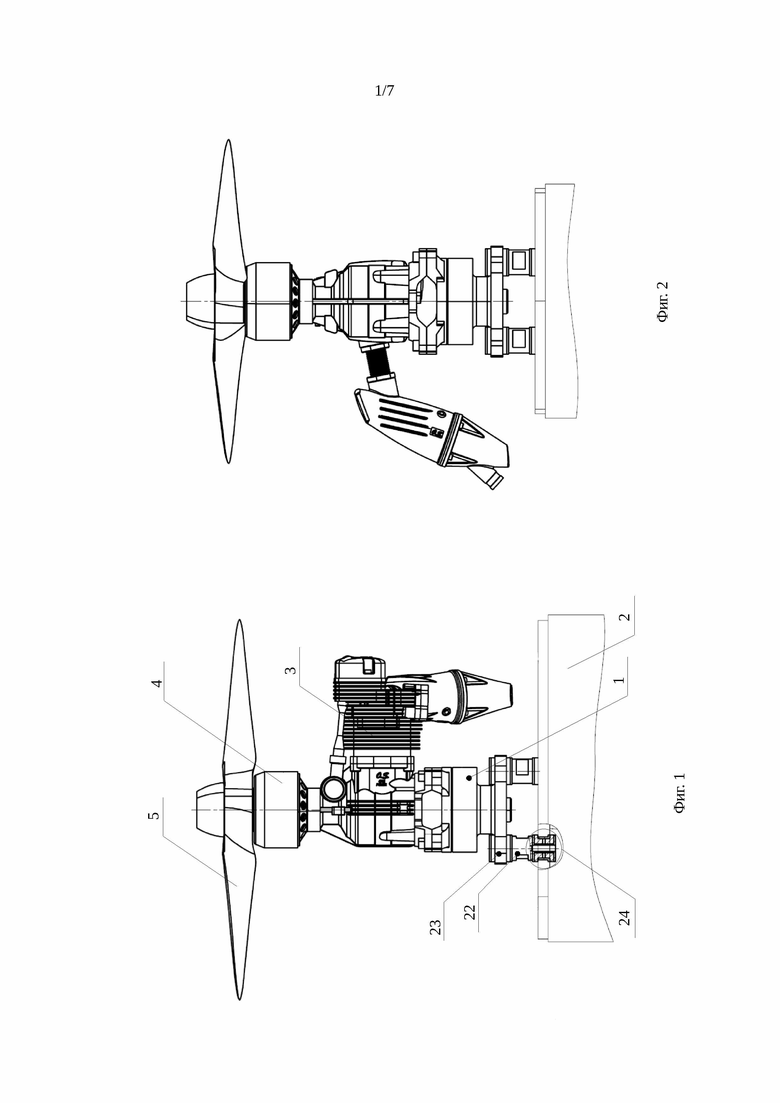
На Фиг. 1 — показан продольный вид системы управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА), закрепленный посредством моторамы на шпангоутах фюзеляжа;
На Фиг. 2 — показан вид сбоку на систему управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА), закрепленный посредством моторамы на шпангоутах фюзеляжа;
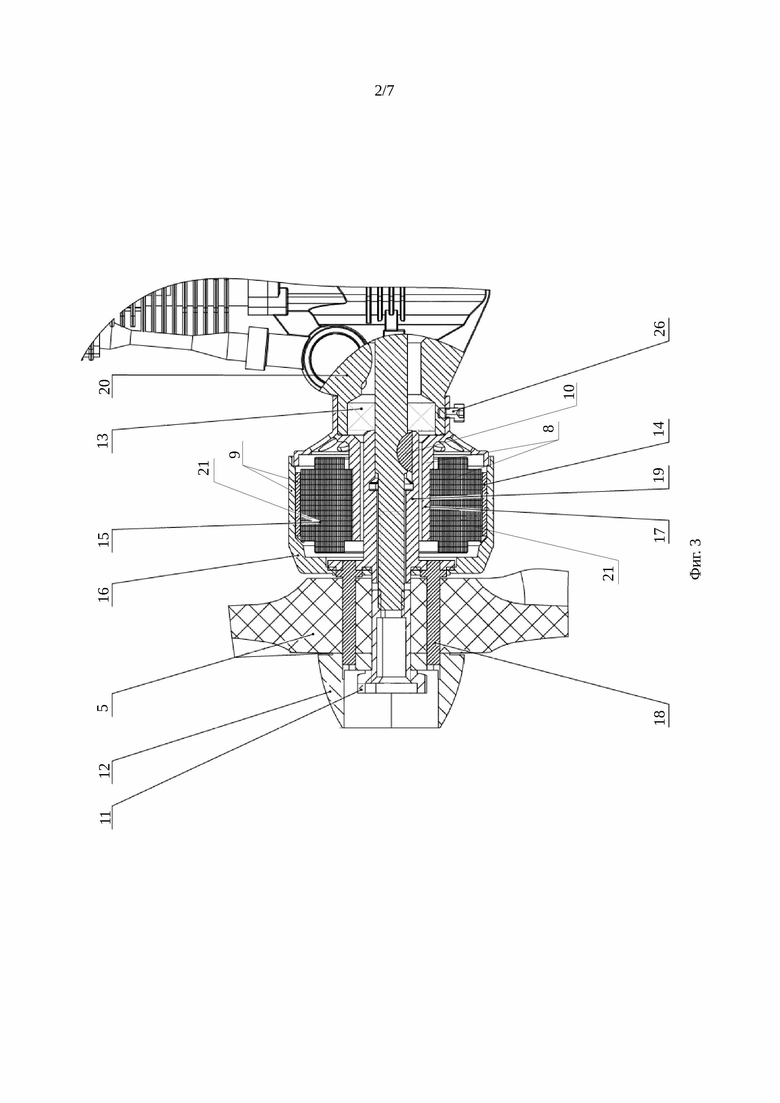
На Фиг. 3 — показан продольный разрез системы управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА) (вал двигателя показан условно);
Система управления и передачи вращательного момента на винт (ы) в беспилотных летательных аппаратах (БПЛА) состоит из амортизатора (1) для крепления системы на фюзеляж (2 — показан тонкими линиями), двигателя (3), стартер — генератора (4), воздушного винта (5) и платы управления (6 - показана условно) стартером генератором. Плата (6) осуществляет переключение режимов работы стартера генератора (4) с режима запуска двигателя (3) на режим генерирования электроэнергии соответственно.
Вал (7) двигателя (3) размещен внутри статора (8) стартер-генератора (4). На валу (7) размещен ротор (9) стартера — генератора (4). Вал (7) соединен шпоночным соединением (10) с ротором (9) стартер-генератора (4) для передачи вращающего момента на воздушный винт (5). Воздушный винт (5) закреплен на валу (7) двигателя гайкой-втулкой (11) через кок — обтекатель (12) воздушного винта (5). Гайка — втулка (11) одновременно удерживает всю систему в сборе на валу (7) двигателя (3). Вал (7) двигателя (3) вращается в подшипнике (13).
В качестве стартера-генератора (4) используют бесколлекторный синхронный электродвигатель (БСЭ) с постоянными магнитами (14) на роторе (9). Также стартер-генератор (4) содержит статор (8) с электромагнитными катушками (15).
Стартер — генератора (4) работает в двух режимах: — стартера для двигателя (3) и генератора для подзарядки аккумуляторов (условно не показаны).
Стартер-генератор (4) снабжен корпусом (16) ротора (9) и корпусом (17) статора (8). Корпус (16) ротора (9) жестко соединен с воздушным винтом (5) посредством штифтов (18). Между корпусом (17) статора (8) и валом (7) двигателя (3) размещена втулка (19). Корпус (17) статора (8) жестко соединен с корпусом (20) двигателя (3).
Стартер — генератор (4) дополнительно снабжен датчиками положения (21, показаны условно) ротора (9) относительно электромагнитных катушек (15) статора (8).
Постоянные магниты (14) ротора (9) расположены относительно обмоток (электромагнитных катушек) (15) статора (8) и образуют между ними магнитное поле, на изменение которого реагируют датчики положения (21). Для определения угла поворота ротора (9) относительно статора (8) используют датчики Холла (21). Однако возможно использовать другие датчики магнитного типа. Предпочтительно применять цифровые биполярные датчики Холла, а также возможно использование практически любых как цифровых, так и аналоговых датчиков, работающих, например, как бесконтактный потенциометр. Количество датчиков положения (21) преимущественно выбирают не менее 3х штук. Эти датчики устанавливают на корпусе (17) статора (8) по окружности, например, под углом примерно 120 градусов. Датчики положения (21) электрически соединяют с платой управления (6) стартер-генератором (4). Вся система управления и передачи вращательного момента на винт, включая корпус (20) двигателя (3), совместно со стартер-генератором (4) и воздушным винтом (5) закреплена на мотораме (22), снабженной амортизаторами (1). Амортизаторы (1) размещены на мотораме (22), а сама моторама (22) снабжена фланцем (23) с узлами крепления (24) на фюзеляже (2).
По команде с автопилота происходит срабатывание стартера- генератора на запуск маршевого двигателя, при этом если магниты стартера- генератора находятся в неправильном положении относительно датчиков Холла, стартер -генератор первоначально поворачивает вал двигателя с тем, чтобы магниты стартера — генератора заняли заданное положение относительно датчиков Холла. На втором шаге он срабатывает в режиме стартера. После успешного запуска система переходит в режим генерации электроэнергии и передачи электроэнергии на полезную нагрузку и бортовое питание.
2. Стартер-генератор.
Стартер-генератор, который используется в системе управления и передачи вращательного момента на винт (ы) относится к электротехническому оборудованию БПЛА, в частности дронов, и может быть использовано в транспортных устройствах, например, для электрического пуска двигателя внутреннего сгорания, а также может быть использован при работающем двигателе внутреннего сгорания в качестве источника питания бортовой электрической сети.
Стартер-генератор предназначен для использования в дронах в области авиастроения, в частности предназначен обеспечить запуск авиационного двигателя и электроснабжение бортовой системы БПЛА.
Обычно в летательных аппаратах применяют управление через гидроусилитель с тарелкой автомата перекоса и рычагом поворота лопасти, но для этого требуется редуктор, соединяющий вал двигателя (двигателей) с валом несущего винта и тахогенератор с указателем числа оборотов, а также топливный регулятор, установленный на двигателе и связанный с датчиками оборотов свободной турбины и турбокомпрессора (см., например, М.М. Масленников, Ю.Г. Бехли, Ю.И. Шальман. Газотурбинные двигатели для вертолетов. М.: Машиностроение, 1969, стр. 109 и И.С. Дмитриев, С.Ю. Есаулов. Системы управления одновинтовых вертолетов, рис. 2.1, стр. 32).
Известно изобретение «Стартер генератор коленчатого вала», патент RU2 700 808, опубл.23.09.2019, конвенционный приоритет 16.10.2014 DE 102014015262.6, МПК F02N 11/04, F16F 15/30, G01D 5/14, G01D 5/245, G01P 3/488, H02K 11/215, H02K 29/08 , в котором с помощью блока управления устанавливается определенное положение поворота ротора относительно статора, положение поворота ротора относительно статора определяется по сигналу суперпозиции, который получается из считанного сигнала и записывающий элемент интегрирован в картер стартера генератора вала. Позволяет предоставить улучшенную возможность регистрации положения поворота ротора относительно статора стартера - генератора коленчатого вала, с помощью которой могут быть устранены недостатки традиционных технологий. Однако может быть использована не в БПЛА, а в модулях трансмиссии транспортных средств, у которых коаксиально коленчатому валу между двигателем и коробкой передач предусмотрена работающая как в режиме двигателя, так и в режиме генератора электрическая машина в виде электрического стартера генератора коленчатого вала. Требуется для того, чтобы зубчатый венец стартера с маховиком был сориентирован так, чтобы контрольная метка была размещена правильно относительно определенного положения коленчатого вала. Не может быть применен в дронах.
Известно изобретение «Стартер генератор газотурбинного двигателя и способ его управления», патент RU2 528 950, опубл.0.09.2014, конвенционный приоритет .30.10.2009, FR 0957661, публикация WO 2011/051598 (05.05.2011), МПК F02N 11/14, H02P 1/50, H02K 19/14, в котором главная электрическая машина, выполнена с возможностью работы в режиме синхронного электрического генератора после запуска двигателя и с возможностью работы в режиме электрического двигателя во время фазы запуска двигателя, роторы главной электрической машины и блока возбуждения установлены на общем валу, предназначенном для механического соединения с валом двигателя. Однако он применим только для стартера генератора газотурбинного двигателя и не предназначен для ДВС или электрических двигателей. Такой стартер генератор может быть применим только для авиационных тяговых газотурбинных двигателей или для вспомогательных газотурбинных силовых установок или APU (“Auxiliary Power Unit”). Является двух или трехкаскадным стартером- генератором, работающим без щеток (или “brushless”). Сложность многокаскадного синхронного генератора обычно влечет за собой большую массу, низкую надежность и высокую стоимость. Кроме того, применим только в качестве вспомогательного устройства для главной электрической машины для того, чтобы подать через GCU переменное напряжение в статорную индукционную катушку блока возбуждения, чтобы получить на его роторных обмотках переменное напряжение, которое после выпрямления питает роторную индукционную катушку главной электрической машины. А для этого он должен быть спроектирован с параметрами, намного превышающими параметры, необходимые для питания блока возбуждения постоянным током в режиме генератора, что приводит к усложнению всей конструкции и не может обеспечить автоматическое поддержание оборотов несущего винта дрона в допустимых пределах при выполнении интенсивных маневров, не может обеспечить перезапуск двигателя при перебоях в его работе без прерывания полета дрона.
Известно изобретение «Цепь электропитания летательного аппарата, включающая в себя асинхронную машину », патент RU2 525 852, опубл.20.08.2014, конвенционный приоритет 10.11.2010 FR 1059269, МПК H02K 17/44, H02P 9/46, которая снабжена генератором электропитания, выполненным с возможностью приведения во вращение посредством двигателя, содержит асинхронную машину, соединенную с устройством возбуждения, и асинхронная машина включает в себя ротор, выполненный с возможностью приведения во вращение посредством двигателя, и статор, причем устройство возбуждения выполнено с возможностью вызывать протекание реактивного тока в статоре. Является машиной, которая устойчива к внешним воздействиям, надежной и недорогой, упрощает внедрение ее в двигатель летательного аппарата. Однако использует асинхронную машину вместо бесколлекторного синхронного электродвигателя. Не позволяет преобразовывать электрический ток из переменного в постоянный.
Наиболее близким техническим решением к предлагаемому стартеру — генератору является изобретение «Интегрированный высокотемпературный стартер генератор и способ управления им», патент RU2 583 837, опубл.10.05.2016, МПК H02K 21/02, H02K 21/12, H02K 19/36, снабженный расположенной на статоре полюсно-переключаемой обмоткой, валом стартера- генератора и двигателем, выполненным единым, и с установленными на валу постоянными магнитами с чередующимися полярностями. В таком интегрированном стартере — генераторе в режиме работы генератором уменьшают число активных полюсов и тем самым уменьшают частоту вырабатываемого тока, а в режиме работы стартером, число активных полюсов увеличивают, обеспечивая при этом достаточный пусковой момент при автоматическом воздействии на размагничивание или намагничивание полюсов в зависимости от режима работы стартера – генератора.
Однако имеет высокие массогабаритные показатели двигателя, обусловленные наличием нескольких полюсных систем ротора. (Ротор двигателя имеет две полюсные системы, образуемые постоянными магнитами, каждая из которых соответствует определенному числу полюсов обмотки статора). Так основную обмотку каждой из двух фаз подключают к источнику питания через один транзистор инвертора, а каждую из рекуперационных обмоток двух фаз подключают к источнику питания через один диод инвертора. Недостатками данного устройства являются высокие массогабаритные показатели, а также сложная система питания электрической машины, которая увеличивает потери энергии на возбуждение стартера. В следствие этого данная конструкция не позволяет увеличить величину пускового момента на валу ДВС при помощи стартера-генератора без увеличения числа элементов аккумуляторной батареи и повысить безотказность пуска ДВС; а также не обеспечивает перезапуск двигателя при перебоях в его работе без прерывания полета дрона, а, следовательно, не обеспечивает увеличение продолжительности и дальности полета дрона.
В известных конструкциях и стартеров и генераторов для питания бортовой сети используется электрическая машина (генератор), которая работает при средних и высоких скоростях ДВС. Поскольку просадка оборотов несущего винта может быть очень большой, вплоть до остановки, например, при выходе на малой скорости из маневра, то при этом потребная мощность окажется существенно большей, чем при исходном установившемся полете. В дронах этот недостаток преодолевают только за счет улучшения приемистости двигателей, т.е. более быстрого изменения располагаемой мощностью. Но в известных конструкциях приемистость двигателя достигается средствами самого двигателя.
Несмотря на то, что стартер и генератор имеют близкие значения по электрической мощности, они обычно не работают одновременно, поскольку совместить их функции в одной электрической машине не удается из - за несовпадения их механических характеристик: стартеру требуются относительно малые скорости при очень больших моментах (в зимнее время превосходящих номинальный момент ДВС), а генератору сравнительно малые моменты при высоких скоростях.
Требуется предложить такой стартер — генератор, который позволит уменьшить массогабаритные характеристик пускового агрегата двигателя внутреннего сгорания и обеспечит работу при преобразовании электрического тока из переменного в постоянный.
Предложенная конструкция стартера — генератора позволяет достичь следующего технического результата:
- обеспечить перезапуск двигателя при перебоях в его работе без прерывания полета дрона за счет преобразования электрического тока из постоянного в переменный, а, следовательно, существенно улучшить эксплуатационные характеристики, уменьшить массогабаритные характеристики пускового агрегата ДВС и увеличить продолжительность и дальность полета дрона.
- увеличить величину пускового момента на валу ДВС при помощи стартера-генератора без увеличения числа элементов аккумуляторной батареи и повысить безотказность пуска ДВС;
Технический результат достигается за счет того, что стартер — генератор для системы управления и передачи вращательного момента на винт БПЛА выполнен в виде бесколлекторного синхронного электродвигателя (БСЭ) с магнитами с чередующимися полярностями, который снабжен статором с расположенными на нем переключаемыми обмотками. Новым в данном техническом решении является то, что стартер — генератор содержит:
- ротор, снабженный «m» штук неодимовых постоянных магнитов радиального намагничивания,
- статор, снабженный «n» штук электромагнитных катушек из электротехнической стали с трехфазной намоткой «виток к витку» медным, например, одножильным проводом с соединением по схеме «треугольник»,
- катушки электрически подключены к плате управления стартером генератором с возможностью изменения режимов работы с режима стартера двигателя на режим генератора тока и обратно, при этом посредством установленных на корпусе статора трех датчиков Холла контролируют положение поворота ротора относительно статора.
Посредством платы управления стартером генератором обеспечивают передачу электрического тока (энергии) на вал двигателя с соблюдением условия, что в любой момент времени на стартер-генератор подают двухфазный ток; и статор выполнен с внутренним цилиндрическим отверстием, сквозь которое с зазором проходит вал двигателя с возможностью его вращения и передачи крутящего момента на корпус ротора. При этом стартер — генератор обеспечивает следующие режимы работы:
- стартера - в зависимости от требуемого крутящего момента на валу двигателя посредством передачи переменного тока на обмотку статора путем поочередного переключая обмоток статора и смены полярности тока на них для передачи крутящего момента на вал двигателя,
- или генератора - в зависимости от наличия полезной нагрузки посредством передачи преобразованного переменного тока в постоянный ток.
При этом ротор жестко скреплен посредством втулки с фланцем и, по меньшей мере, двух пальцев с воздушным винтом.
Техническое решение стартера — генератора поясняется чертежом, который, однако не охватывает всех возможных вариантов исполнения корпусов и их соединения с воздушным винтом.
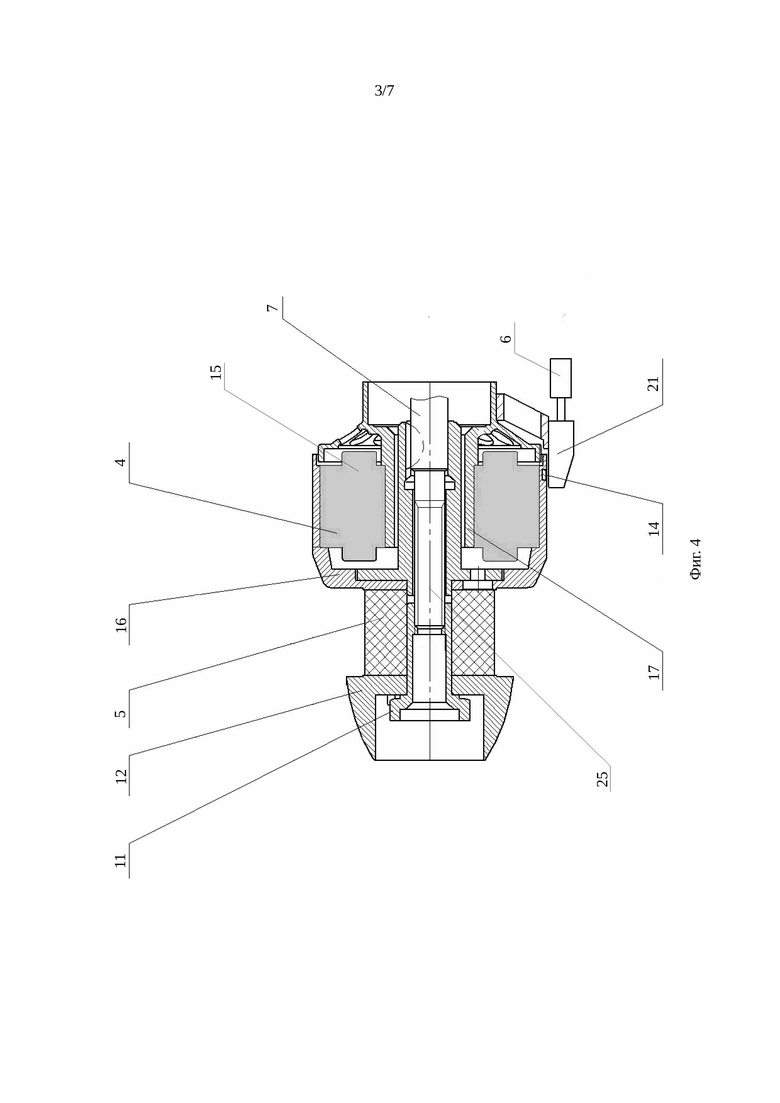
На Фиг. 4 — показан продольный разрез стартера — генератора, вал ротора которого соединен с валом ДВС и с другого конца скреплен с винтом.
Стартер — генератор (4) и винт (5) размещены на валу (7) двигателя (3). Для этого вал ротора (25) соединен шпонкой (10) с валом (7) двигателя (3), образуя общую ось для ротора (9) и винта (5). Стартер — генератор (4) выполнен в виде бесколлекторного синхронного электродвигателя (БСЭ) с магнитами (14) с чередующимися полярностями и снабжен статором (8) с расположенными на нем переключаемыми обмотками (15). Статор (8) размещен в корпусе (17), который выполнен в виде стакана с цилиндрической стенкой и конической юбкой, и снабжен «n» штук электромагнитных катушек (15), сердечник которых выполнен из электротехнической стали, а намотка из медного провода выполнена трехфазной типа «виток к витку». Медный провод преимущественно выполняют одножильным, однако допустимо провод выполнять из 2,3 и т.п. жил. Это зависит от расчета выходной мощности. Провода соединены по схеме «треугольник», допустимо соединение «звезда». Количество переключаемых обмоток может быть от 3 (трех) штук до 210 штук, кратных трем. Обмотки размещены внутри корпуса (17) между наружными и внутренними стенками корпуса. Внутренняя стенка корпуса (17) надета на втулку (19) с минимальным зазором для отсутствия биения при вращении ротора (9). Корпус (17) статора (8) закреплен на корпусе двигателя (20) посредством крепежных элементом (26).
Корпус (16) ротора (9) выполнен цилиндрическим с наружной стенкой, охватывающей статор с обмотками. На внутренней поверхности цилиндрической стенки корпуса (16) закреплены «m» штук, например, неодимовых, постоянных магнитов радиального намагничивания (14). Постоянные магниты (14) размещены по окружности корпуса (16) с минимальным зазором между ними в зависимости от магнитных катушек и имеют форму, охватывающую магнитные катушки, магниты. При этом ротор (9) жестко скреплен посредством втулки с фланцем (гайки — втулки) (11) и, по меньшей мере, двух пальцев (18) с воздушным винтом (5).
Обмотки катушек (15) с сердечником электрически подключены каждая соответственно к силовой части платы управления (6) стартером - генератором (4) с возможностью изменения режимов работы с режима стартера двигателя на режим генератора тока и обратно. При этом посредством установленных на корпусе (17) статора (8) трех цифровых датчиков (21) в виде датчиков Холла контролируют положение поворота ротора (9) относительно статора (8).
Посредством платы управления (6) стартером генератором (4) обеспечивают передачу электрического тока (энергии) на вал (7) двигателя (3), продолжением которого является вал (ось) ротора (9). Вал (7) соединен шпоночным соединением (10) со втулкой (19), а передача электрической энергии осуществлена с соблюдением условия: чтобы в любой момент времени на стартер-генератор (4) был подан двухфазный ток, иными словами в каждый момент времени ток протекает между двумя фазами обмоток стартер-генератора (4);
Статор (8) выполнен с внутренним цилиндрическим отверстием, сквозь которое с зазором проходит вал (7) двигателя с возможностью его вращения и передачи крутящего момента на корпус (16) ротора (9). При этом стартер — генератор (4) обеспечивает следующие режимы работы:
- режим стартера - в зависимости от требуемого крутящего момента на валу (7) двигателя посредством передачи переменного тока на обмотку статора (8) путем поочередного переключая обмоток статора (8) и смены полярности тока на них для передачи крутящего момента на вал (7) двигателя,
- или режим генератора - в зависимости от наличия полезной нагрузки посредством передачи преобразованного переменного тока в постоянный ток.
Например, в дронах типа HLQ, Goliath для передачи вращательного момента на винты используется ременная передача. А в дронах типа Yeair (компании Airstier) в силовой установке используется комбинация из бензиновых и электрических моторов. Дроны типа SOAPdrones модель Belias используют специальные сервомоторы, с помощью которых происходит мгновенное изменение шага вращения винтов, но они слишком сложны по конструкции, а, следовательно, ненадежны.
Предложенная конструкция системы для передачи вращательного момента на винты использует любой тип двигателя силовой установки, не требует дополнительного силового двигателя, чем существенно улучшает эксплуатационные характеристики дрона и уменьшает массогабаритные характеристики пускового агрегата, поскольку стартер — генератора является вспомогательным типом электрической машины, размещенной непосредственно на валу силового агрегата. А это, в свою очередь оптимизирует работу силового агрегата, следовательно, и увеличиваются возможности автономного полета дрона.
В предложенной конструкции использована электрическая машина с внешним ротором, которую используют там, где требуется точное позиционирование и устойчивость к перегрузкам по моменту. Кроме того, магниты радиального намагничивания, т.е. направление магнитного поля в неодимовом магните направлена по радиусу к центру. Например, на роторе могут размещать неодимовые постоянные магниты с рабочей температурой использования от - 400 С до + 900 С позволяет достигать БСЭ стартера — генератора требуемой мощности.
Управление стартера — генератора обеспечена за счет блока управления, где в контролере размещают преобразователь постоянного напряжения в трехфазное импульсное.
Электрическая связь обмоток, связывающая контроллер с периферийными устройствами обеспечена, например, через порты, типа I2C, SPI, USB, IMU1, IMU2, iESC, API, CAN1, CAN2 и др. [Р.Н. Набиев, А.А. Aбдуллаев. Обзор этапов развития, конструкций и проблем проектирования БПЛА типа мультикоптер.//Современная наука: актуальные проблемы теории и практики. Серия Естественные и технические науки. г. Москва, 2017. №3-4. с. 16-21. //Milli Aviasiya Akademiyasının Elmi Məcmuələri. Cild 18, №4, 2016. səh 10-17. Məqalə.]
При реализации предложенной системы со стартером — генераторов может быть использован, например, двигатель внутреннего сгорания O.S. Engines GT15 или GT15 Air Gasoline Engine.
При работе стартера генератора, он выводит винт в нужное для нормального запуска двигателя положение, и поворотом винтомоторной группы обеспечивает запуск двигателя, при достижении двигателем заданных оборотов переходит в режим генерации электроэнергии и передачи ее на полезную нагрузку и бортовую аппаратуру.
3. Плата управления стартером генератором.
Плата управления стартером-генератором относится к области электротехники и силовой электроники и может быть использовано при построении стартер - генераторных систем (СГС) для летательных аппаратов, в которых для достижения высокого качества генерируемой электрической энергии применяются статические преобразователи электрической энергии. В частности, относится к системам преобразования электроэнергии, системам управления двигателями, преобразования и распределения энергии на полезную нагрузку.
Может быть использовано для реализации независимо от различных вариантов исполнения двигателей. Относится к контроллеру для управления пуском двигателя БПЛА и может быть, преимущественно, пригодна для дрона, имеющего двигатель, который автоматически запускается после автоматического останова.
Известна полезная модель «Контроллер для управления пуска двигателя транспортного средства», патент RU 154 193, опубл.20.08.2015, конвенционный приоритет 30.06.2011, публикация WO 2013/002824 (03.01.2013), US 13/174,559, МПК F02N 11/08, в которой контроллер выполнен с возможностью соединения с двигателем и генератором переменного тока, причем контроллер содержит дополнительные команды для регулировки нагрузки генератора переменного тока, приложенной к двигателю в ответ на запрос крутящего момента двигателя и запрос системы управления, и электрическая система управления электрически присоединена к аккумуляторной батарее и генератору переменного тока. Позволяет обеспечить запуск транспортного средства посредством учета входного сигнала управления транспортного средства и запроса крутящего момента двигателя, а также обеспечивает выполнение команды контроллера по регулировке нагрузки генератора переменного тока, приложенной к двигателю в ответ на спрогнозированное событие. Однако не позволяет уменьшить массогабаритные характеристики пускового агрегата двигателя внутреннего сгорания и преобразование электрического тока из переменного в постоянный.
Наиболее близким к предложенной плате управления является изобретение «Адаптивная стартер генераторная система для летательных аппаратов», патент RU2 713 390, опубл. 05.02.2020, МПК H02J 7/34, в котором к синхронному генератору с возбуждением от постоянных магнитов подключен параллельный полупроводниковый преобразователь на базе последовательно соединенного двунаправленного dc dc преобразователя, построенного на базе мостовой схемы, а выходы преобразователя подключены соответственно к трехфазной нагрузке переменного тока и к зажимам ac dc преобразователя, построенного на базе двунаправленного инвертора напряжения, и в звене постоянного тока подключен к зажимам двунаправленного dc dc преобразователя, последовательно соединенного с аккумуляторной батареей и нагрузкой постоянного тока. Изобретение позволяет наделить систему электроснабжения функциями адаптивных систем, появляются свойства так называемых «умных» электрических сетей («smart grid»), что повышает живучесть летательного аппарата. Однако невозможность его работы от синхронного генератора с переменной частотой вращения вала, так же как в коллекторных электрических машинах, содержащих коллектор и щетки, что обусловлено невозможностью их работы из — за скользящего контакта. Предложенное в изобретении техническое решение не позволяет работать от синхронного генератора с переменной частотой вращения вала двигателя. (см. Стартер генераторная система для вспомогательной силовой установки/Левин А.В., Халютин С.П., Давидов А.О., Жмуров Б.В. и др.//Научный вестник МГТУ ГА 2017. №05, Том 20. С. 5066).
Устройства управления двигателем могут представлять собой относительно тяжелое оборудование, вес устройств управления двигателем по существу пропорционален номинальной мощности устройства управления.
Устройство управления двигателем в известных схемах содержит комбинацию из выпрямителей, инверторов и фильтров, которые приводят электрический сигнал, принимаемый от источника питания для использования двигателем, в определенное состояние. Каждое устройство управления двигателем имеет размер, соответствующий требованию по пиковой нагрузке на единицу мощности двигателя, который обслуживается устройством управления двигателем. Важным является совмещение функций режима стартерного запуска двигателей и режима генерации электрической энергии в одном агрегате. В предложенной схеме появляется возможность повысить надежность, а также улучшить массогабаритные показатели авиационных систем за счет отказа от большого числа быстро изнашиваемых частей оборудования летательных аппаратов. Кроме этого, требуется совместить функции генерирования электрической энергии переменного и постоянного тока, а также осуществлять перетоки электрической энергии между этими системами генерирования. В этом случае открывается возможность стартерного запуска газотурбинного или иного двигателя, как от сети переменного, так и постоянного тока. Это особенно важно, поскольку как пуск в ход, так и пуск в разгон транспортного средства с остановки может не давать требуемого ответного действия в некоторых условиях, так как двигатель может быть нагружен посредством периферийных систем, которые потребляют энергию по перезапуску двигателя.
Предложенное техническое решение платы управления стартером генератором для системы управления и передачи вращательного момента на винт позволяет достичь следующего технического результата:
- и преобразование электрического тока из переменного в постоянный и наоборот;
- уменьшение массогабаритных характеристик пускового агрегата двигателя внутреннего сгорания.
Заявленный технический результат получают за счет того, что плата управления стартером генератором системы управления и передачи вращательного момента на винт выполнена с возможностью преобразования в нем переменного тока в постоянный, что позволяет заряжать аккумулятор и питать полезную нагрузку. Новым является то, что плата состоит из
- полупроводникового ключа,
- схемы заряда аккумуляторной батареи,
- контроллера,
- трехфазного силового каскада,
- и, по меньшей мере, трех датчиков Холла.
При этом датчики Холла электрически соединены с контроллером, посредством которого с выходов контроллера снимают показания режима работы стартера генератора, а на вход контроллера поступает сигнал обратной связи с датчиков Холла, при этом угол между датчиками Холла выбран таким образом, чтобы за одно переключение обмоток бесколлекторного синхронного электродвигателя (БСЭ) поворот ротора БСЭ с магнитами оказывал влияние только на один из датчиков. При этом переключение значения датчика происходит под действием магнитного поля и южного, и северного полюса. Датчик срабатывает под действием поля от южного полюса, а отпускается под действием северного полюса, и с помощью полупроводникового ключа, который осуществляет переключение режимов работы стартера генератора. Для переключения режимов работы плата выполнена с возможностью перевода посредством трехфазного силового каскада стартера - генератора в режим передачи переменного тока на нагрузку, причем трехфазный силовой каскад состоит из трех транзисторных полумостов, которые открывают таким образом, чтобы в любой момент времени ток протекал через две фазы.
Устройство платы пояснено чертежом.
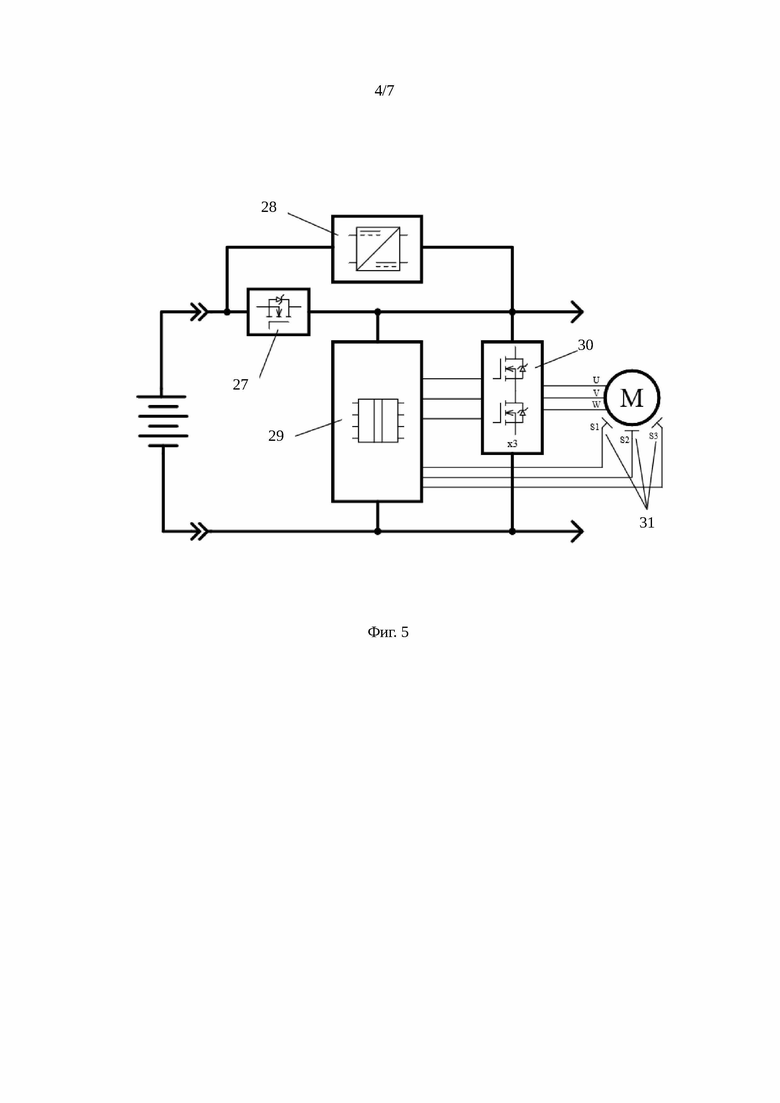
На Фиг. 5 — показан схема платы управления стартером - генератором
Аппаратная часть платы управления состоит из полупроводникового ключа (27), схемы заряда аккумуляторной батареи (28), контроллера (29), трехфазного силового каскада (30) и датчиков Холла (31).
Представленная схема позволяет производить пуск двигателя (3), в частности, двигателя внутреннего сгорания, с установленным на его валу (7) бесколлекторным синхронным электродвигателем стартера — генератора (4). После запуска плата (6) стартер-генератора (4) преобразует переменный ток в постоянный, позволяя питать полезную нагрузку, и заряжает аккумулятор.
Это достигается за счет того, что плата (6) стартер-генератора (4) выполнена в виде блоков силового каскада (30) управления обмотками (15) двигателя (3), контролера (29), датчиков Холла (31), схемы заряда (28) и полупроводникового силового ключа (27) по команде в автоматическом режиме. Это позволяет запускать двигатель внутреннего сгорания (ДВС) (3), преобразовывать генерируемую энергию, заряжать аккумулятор и контролировать все параметры работы модели БПЛА в разных режимах.
Контроллер (29) управляет работой блоков и замеряет параметры работы стартера — генератора (4) и всего БПЛА. Получая сигнал на за пуск двигателя (3), контроллер (29) проверяет входные условия, такие как: напряжение аккумуляторной батареи, температуру силового каскада (30), обороты вала (7) двигателя (3), значения датчиков Холла (31). Если все условия, заданные системой управления соблюдаются, контроллер (29) подает сигналы на трехфазный силовой каскад (30). Силовой каскад (30) состоит из трех транзисторных полумостов. Транзисторы открываются таким образом, чтобы в любой момент времени ток протекал через одну обмотку БСЭ стартера — генератора (4). Переключая обмотки (15) по очереди и меняя полярность тока на них, осуществляется вращение вала (7). Для получения высокого момента на валу (7) уже с первого включения обмотки (15) используют датчики Холла (31). Они встроены в конструкцию стартера — генератора (4) (электродвигателя - БСЭ) и представляют собой инкрементальный энкодер, т.е. устройство, которое определяет угол поворота вращающегося объекта, выдавая импульсный цифровой код. Угол между датчиками (31) выбран таким образом, чтобы за одно переключение обмоток (15) поворот ротора (9) с магнитами (14) оказывал влияние только на один из датчиков (31) и значение датчика менялось на противоположное с ноля на единицу или наоборот, которые соответствуют полюсам. Контроллер (29) следит за оборотами коленвала (7) и как только мотор запустится, контроллер (29) отключает управление трехфазного силового каскада (30). Вырабатываемый переменный ток выпрямляется силовым каскадом (30), который за счет внутренних обратно включенных диодов транзисторов образует выпрямительный мост Ларионова. Контроллер (29) измеряет величину вырабатываемого напряжения и если она достаточна для зарядки аккумулятора, например, составляет 14 вольт (для LiPo аккумуляторов 3S), то включает схему заряда (28). Схема заряда (28) представляет из себя стабилизатор напряжения и тока, позволяющая заряжать литиевый аккумулятор в режиме «ограничение тока» и «ограничение напряжения». Полупроводниковый ключ (27) в данной схеме переключает течение тока в зависимости от режима работы. В режиме стартера ток из аккумуляторной батареи течет через трехфазный силовой каскад (30), приводя в движение электродвигатель — БСЭ, т.е. стартер — генератор (4). В режиме генератора ключ (27) закрывается, не давая нестабилизированному напряжению и току протекать через аккумулятор. В этом случае через аккумулятор может протекать только ток схемы заряда (28). Ключевые параметры, которые измеряет контроллер (29) при работе платы (6) в режиме стартера - это напряжение аккумуляторной батареи, ток, потребляемый стартером, и время поворота ротора (9) после одного переключения обмотки (15). В режиме генератора контроллер (29) следит за оборотами (колен)вала (7), величиной вырабатываемого напряжения, током заряда аккумулятора и мощностью, отдаваемой на полезную нагрузку.
В представленном техническом решении заявленная система позволяет производить пуск двигателя внутреннего сгорания с установленным на его валу бесколлекторным синхронным электродвигателем. После запуска плата (6) стартер-генератора (4) преобразует переменный ток в постоянный, позволяя питать полезную нагрузку, и заряжает аккумулятор.
Плата (6) стартер-генератора (4), выполненная в виде блоков силового каскада (30) управления обмотками (15) стартера — генератора (4), работающего как электродвигатель, контролера (29), датчиков Холла (31), схемы заряда (28) и силового ключа (27) по команде в автоматическом режиме позволяет запускать двигатель внутреннего сгорания (3), преобразовывать генерируемую энергию, заряжать аккумулятор и контролировать все параметры работы модели БПЛА в разных режимах.
Контроллер (29) управляет работой блоков и замеряет параметры работы всей системы. Получая сигнал на запуск двигателя (3), контроллер (29) проверяет входные условия, такие как: напряжение аккумуляторной батареи, температуру силового каскада (30), обороты коленвала (7), значения датчиков Холла (31). Если все условия соблюдаются, контроллер (29) подает сигналы на трехфазный силовой каскад (30).
Силовой каскад состоит из трех транзисторных полумостов. Транзисторы открываются таким образом, чтобы в любой момент времени ток протекал через две фазы статора (8). Переключая фазы по очереди и меняя полярность тока на них, осуществляется вращение вала (25) и соответственно, вала (7) БСЭ стартера — генератора (4).
Для получения высокого момента на валу (7) уже с первого включения обмотки (15) используются датчики Холла (31). Они встроены в конструкцию БСЭ стартера — генератора (4) и представляют собой инкрементальный энкодер. Угол между датчиками выбран таким образом, чтобы за одно переключение обмоток поворот ротора с магнитами оказывал влияние только на один из датчиков и значение датчика менялось на противоположное. Контроллер (29) следит за оборотами (колен)вала (7) и как только двигатель (3) запустится, контроллер (29) отключает управление трехфазного силового каскада (30). Вырабатываемый переменный ток выпрямляется силовым каскадом (30), который за счет внутренних обратно включенных диодов транзисторов образует выпрямительный мост Ларионова. Контроллер (29) измеряет величину вырабатываемого напряжения и если она достаточна для зарядки аккумулятора, то включает схему заряда (28). Схема заряда (28) представляет из себя стабилизатор напряжения и тока, и позволяет заряжать литиевый аккумулятор в режиме «ограничение тока» и «ограничение напряжения». Полупроводниковый ключ (27) в данной схеме переключает течение тока в зависимости от режима работы. Компонентная база состоит из общедоступных марок таких как Texas Instruments, Honeywell, INFINEON, STMICROELECTRONIX.
В плате использованы стандартные комплектующие, например, существующие модели типы полупроводникового ключа (27) IRFS 3206, схемы заряда аккумуляторной батареи (28) BQ 24125, контроллера (29) STM32F103, трехфазного силового каскада (30) IRF 3205 и датчиков Холла (31) SS311PT.
В режиме стартера ток из аккумуляторной батареи течет через трехфазный силовой каскад (30), приводя в движение стартер — генератор (4) в режиме электродвигателя. В режиме генератора ключ (27) закрывается, не давая нестабилизированному напряжению и току протекать через аккумулятор. В этом случае через аккумулятор может протекать только ток схемы заряда. Ключевые параметры, которые измеряет контроллер при работе платы в режиме стартера это напряжение аккумуляторной батареи, ток, потребляемый стартером, и время поворота ротора (9) после одного переключения обмотки (15). В режиме генератора контроллер (29) следит за оборотами коленвала (7) и величиной вырабатываемого напряжения, током заряда аккумулятора и мощностью, отдаваемой на полезную нагрузку.
В результате чего уменьшаются массогабаритные характеристики пускового агрегата двигателя внутреннего сгорания и осуществляется преобразование электрического тока из переменного в постоянный.
4. Амортизатор для этой системы.
Амортизатор применяется в единых системах передачи вращательного момента на винт от двигателя, который крепится на фюзеляже летательного аппарата. В частности, относится к авиационной технике и может быть использовано при создании конструкций фюзеляжей дронов.
Амортизатор предназначен для передачи нагрузок, создаваемых несущим винтом (ротором) и двигателем на фюзеляж, и, в частности, для противодействия осевым и поперечным нагрузкам, а также знакопеременным нагрузкам.
Из уровня техники известны заявки на изобретение № RU93003314 «Узел главного редуктора трансмиссии вертолета», где диск ступицы выполнен из гибкого материала, и заявка № 93025658 «Редуктор вертолета соосной схемы», в котором применены упругие звенья, однако они не могут быть использованы в системе передачи вращательного момента от винта на фюзеляж.
Известна заявка на изобретение «Модифицированное прямозубое цилиндрическое зацепление» № RU 94040908, Конвенционный приоритет 09.03.1992 US 848623, публикация 10.08.1996, и заявка PCT US 93/01191 (10.02.1993), в которых для преодоления шума, вызванного вибрацией, используют только уменьшение люфтов между движущимися частями редуктора. Такое решение используют только в коробке передач, а не в системе, предложенной в системе с данным техническим решением. Возможность уменьшения вибрации, передаваемой на фюзеляж от самого двигателя и винта БПЛА не может быть осуществлена только за счет уменьшения люфтов между движущимися частями, так как вибрация возникает прежде всего за счет разных режимов работы как двигателя, так и винта.
Известно изобретение ЕР 0508938, опубликовано 14.10. 1992 г., конвенционный приоритет 10.04. 1991, US 19910683211, в котором для передачи продольных, боковых, вертикальных и всех крутильных нагрузок используют интегрированный в корпус фюзеляжа сервопривод со вторичными плоскостями, которые воспринимают нагрузку вместо шпангоута фюзеляжа. Однако данная схема не подходит к предлагаемому техническому решению.
Наиболее близким техническим решением является изобретение «Опора для установки главного редуктора с несущим винтом», патент RU 2 343 089, опубл 10.01.2009, МПК B64C 27/00 B64C 27/12, в которой корпусное тело имеет цилиндрический корпусный элемент, основание, выполненное П образной формы и узлы крепления. Создание такой опоры для установки системы с несущим винтом при ее интегрировании в конструкцию силового каркаса фюзеляжа обеспечивает оптимальное перераспределение нагрузок с несущего винта, а также позволяет воспринять сосредоточенные эксплуатационные нагрузки, в частности, от внешней грузовой подвески. Однако не используют демпферы и опора не может быть использована для системы передачи вращательного момента на винт в предложенной разработчиком схеме. Данное техническое решение не позволит существенно уменьшить общую массу дронов за счет отказа от трансмиссии и уменьшить массогабаритные характеристики ДВС.
При работе ДВС, который соединен с воздушным винтом через стартер — генератор и размещен на шпангоутах фюзеляжа БПЛА возникают знакопеременные нагрузки на фюзеляж, вызывающие его вибрацию. В результате таких нагрузок требуется либо существенно уменьшить нагрузку на фюзеляж за счет демпфирования осевых и поперечных нагрузок, либо существенно утяжелять фюзеляж для придания ему необходимой прочности, что, в свою очередь повлечет увеличение мощности двигателя. Поставленная задача особенно актуальна для фюзеляжных дронов, которые по условиям штатного полета должны выполнять крутые маневры, резко снижать и наращивать число оборотов винта при маневрирования. Кроме того, частые остановки винта и последующий его запуск существенно будет увеличивать вибрацию, передаваемую на фюзеляж при раскручивании винта. Эта задача особенно важна при применении двигателей различных типов, так как в разных схемах двигателей, например, в поршневых или турбированных или электрических характеристики нагрузок при передачи на винт будут разными.
Для лётно-технических характеристик перспективный БПЛА должен оснащаться высокоэффективной силовой установкой (двигателем) при рациональной конструктивно-компоновочной схеме с оптимальными параметрами рабочего процесса, поэтому наличие эффективного амортизатора в предложенной системе является неотъемлемой частью самой системы, поскольку необходимо обеспечивать много режимность ее применения в крейсерском режиме полета. Кроме того, требуется обеспечить адаптацию режимов полета за счет системы управления и конструктивно — компоновочной схемы, адаптированных к возможным отказам и неисправностям.
Предложенная конструкция амортизаторов в системах передачи вращательного момента на винт от двигателя позволяет достичь следующего технического результата:
- существенно уменьшить массогабаритные характеристики полезной нагрузки за счет исключения воздействия вибрации схему управления БПЛА и полезную нагрузку, такие как платы управления, фотоаппараты, видеокамеры, тепловизоры, лазеры;
- общую массу дронов за счет отказа от трансмиссии и уменьшения массогабаритных характеристик пускового агрегата ДВС
- возможность применения различных типов двигателей;
Технический результат достигается за счет того, что амортизатор системы управления и передачи вращательного момента на винт состоит из моторамы с фланцем, который (фланец) соединен посредством вилки моторамы, имеющей ответные узлы крепления в крышке корпуса двигателя, при этом фланец размещен симметрично продольной оси стартера — генератора, и вилки моторамы, соединенной с фланцем моторамы, а фланец моторамы закреплен на шпангоутах фюзеляжа посредством вибродемпфирующих элементов. Новым является то, что - фланец моторамы и шпангоуты фюзеляжа дополнительно снабжены, по меньшей мере, четырьмя стаканами каждый, в которых размещены упруго пластические втулки. В частном случае упруго - пластические втулки выполнены из резины марки, например, Mold Max или РТ. Вилка моторамы опорной частью жестко закреплена на фланце моторамы посредством, по меньшей мере, четырех пальцев, между которыми (пальцами) размещены сегментообразные демпферы, с помощью которых гасят вибрационные усилия, возникающие при работе БСЭ и воздушного винта, и передающиеся на фюзеляж. Например, сегментообразные демпферы могут быть выполнены из, например, Mold Max или РТ.
Стаканы фланца моторамы закреплены на стаканах шпангоутов фюзеляжа соответственно посредством оси, размещенной в стаканах фюзеляжа и фланца моторамы, причем между каждой парой стаканов размещена на этой же оси бобышка виброразвязки моторамы. В частности, бобышки виброразвязки могут быть выполнены из упруго — пластического материала, например, Mold Max или РТ. Также в качестве частного примера исполнения ось может быть снабжена фланцем с наворачивающейся на нее крепежной деталью с фланцем для соединения стаканов и виброразвязки.
Конструкция амортизатора поясняется чертежами, которые не охватывают всех вариантов исполнения отдельных конструктивных деталей и узлов, которые могут содержать различные типы креплений и соединений деталей.
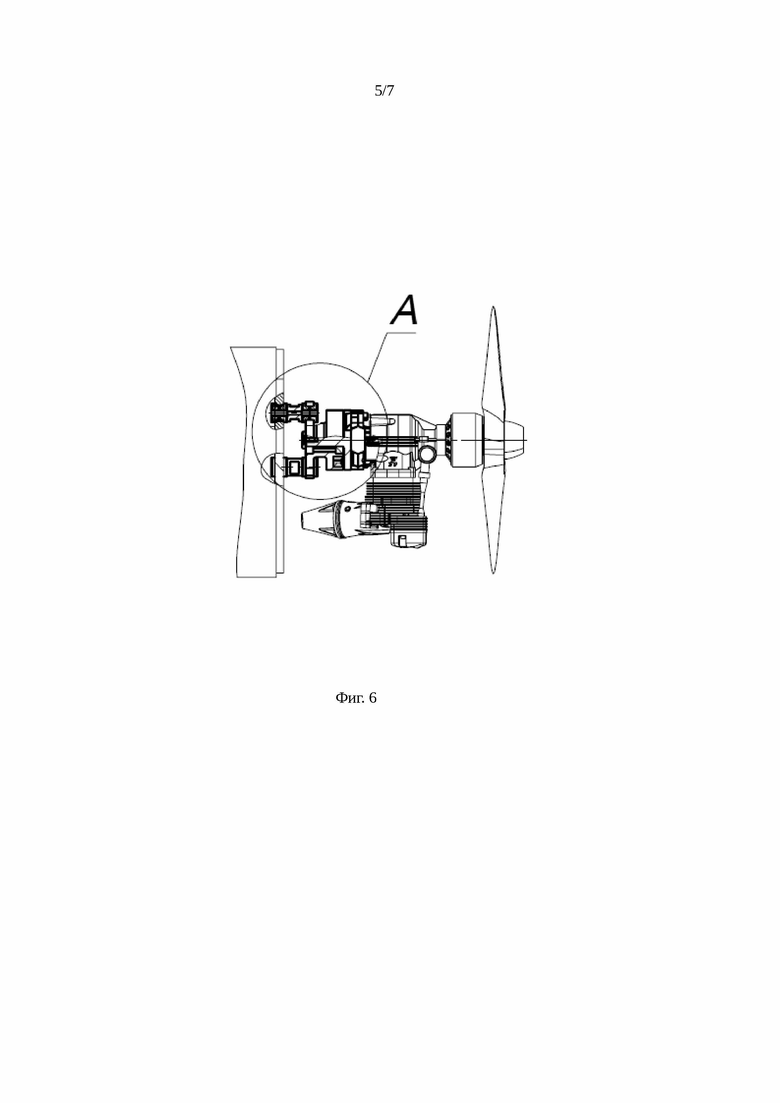
На Фиг. 6 — показан общий вид системы управления и передачи вращательного момента на винт с продольным разрезом по амортизатору;
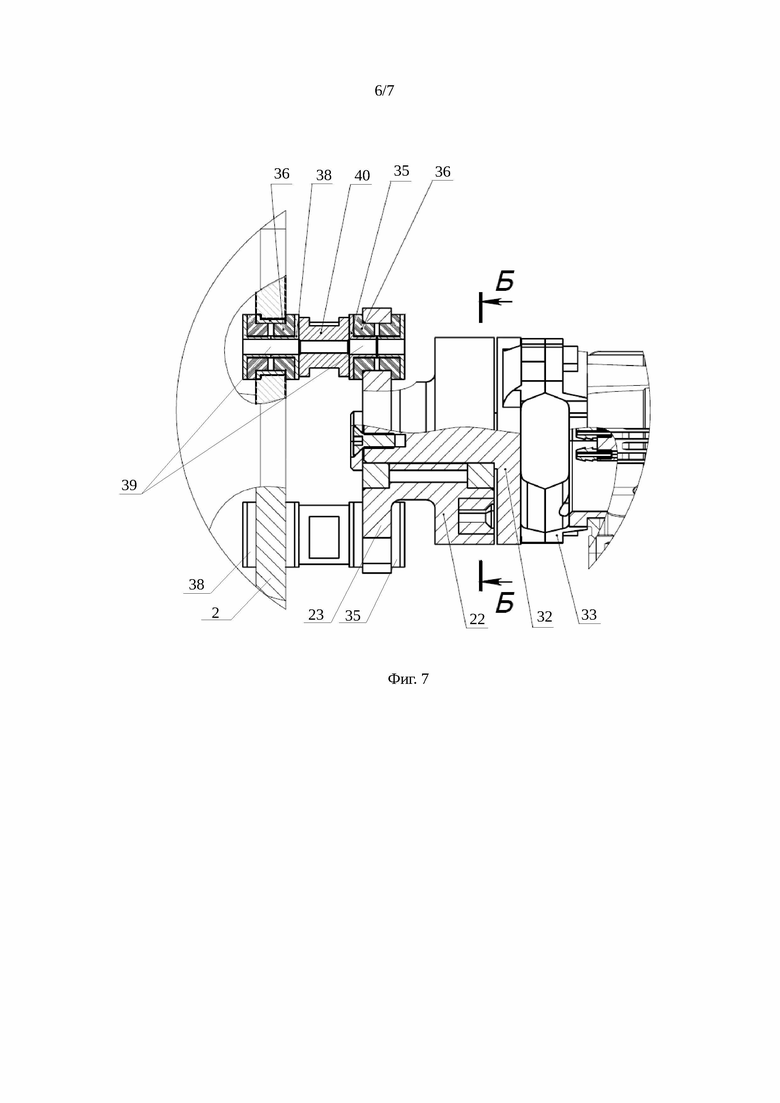
На Фиг. 7 — показано продольное сечение амортизатора, установленного на фюзеляж (фюзеляж показан тонкими линиями);
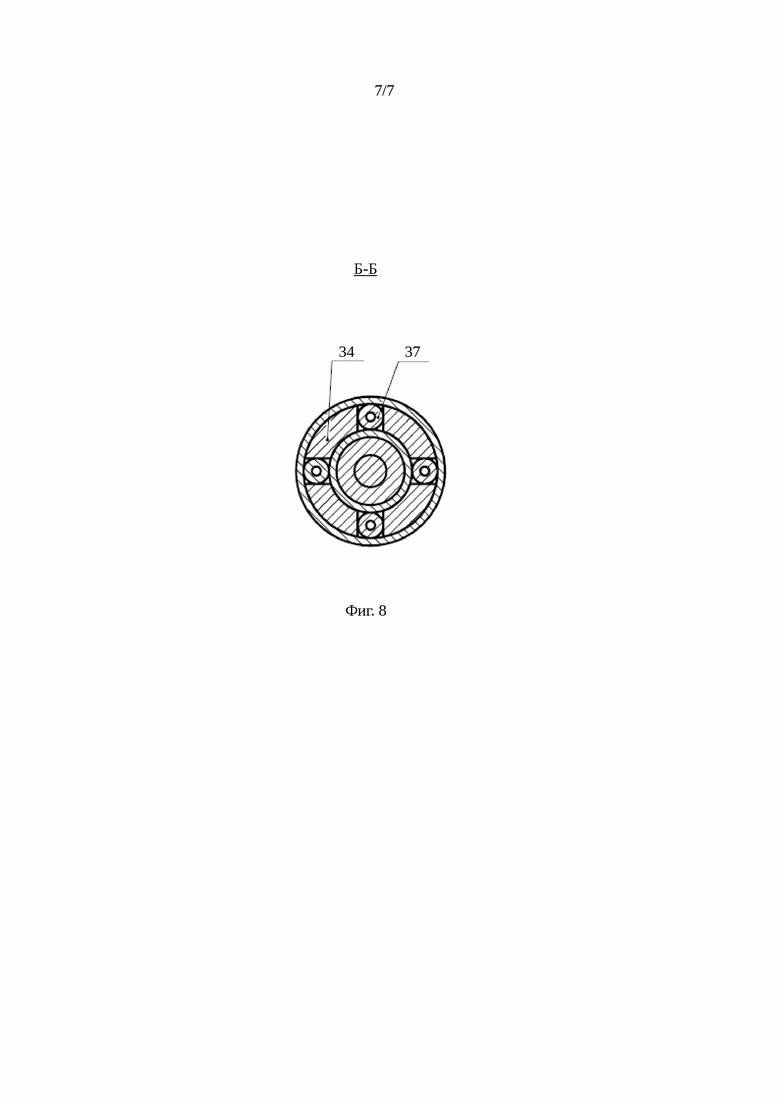
на Фиг. 8 — показано сечение А-А по демпферу с пальцами;
Амортизатор системы управления и передачи вращательного момента на винт состоит из моторамы (22) с фланцем (23), который (фланец) соединен посредством вилки (32) моторамы (22), имеющей ответные узлы крепления (24) в крышке (33) корпуса (20) двигателя (3). При этом фланец (23) размещен симметрично продольной оси стартера — генератора (4), и вилки (32) моторамы (22), соединенной с фланцем (23) моторамы (22), а фланец (23) моторамы (22) закреплен на шпангоутах фюзеляжа (2) посредством вибродемпфирующих элементов.
Фланец (23) моторамы (22) и шпангоуты фюзеляжа (2) дополнительно снабжены, по меньшей мере, четырьмя стаканами (35) каждый, в которых размещены упруго пластические втулки (36).
Вилка (32) моторамы (22) опорной частью жестко закреплена на фланце (23) моторамы (22) посредством, по меньшей мере, четырех пальцев (37), между которыми (пальцами) размещены сегментообразные демпферы (34), с помощью которых гасят вибрационные усилия, возникающие при работе двигателя (3) и воздушного винта (5), и передающиеся на фюзеляж (2).
Стаканы (35) фланца (23) моторамы (22) закреплены на стаканах (38) шпангоутов фюзеляжа (2) соответственно посредством осей или одной оси (39), размещенной в стаканах (35 и 38) фюзеляжа (38) и фланца (23) моторамы (22), причем между каждой парой стаканов (35-38) размещена на этой же оси (39) бобышка виброразвязки моторамы (40). Также в качестве частного примера исполнения ось (39) может быть снабжена фланцем с наворачивающейся на нее крепежной деталью (39´) с фланцем для соединения стаканов (35 и 38) и виброразвязки (40).
При работе двигателя (винтомоторной группы) возникают колебания, связанные с дисбалансом частей силовой установки. Вибродемпфирующие элементы, установленные на шпангоуте фюзеляжа и фланце моторамы гасят разнонаправленные колебания и низкочастотные колебания, а сегментные демпферы, установленные в вилке моторамы, компенсируют вибрации, вызванные крутящим моментом силовой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| СИСТЕМА СТАРТЕР-ГЕНЕРАТОР ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2012 |
|
RU2510796C1 |
| СТАРТЕР-ГЕНЕРАТОР АВТОМОБИЛЯ | 2013 |
|
RU2543076C2 |
| СТАРТЕР-ГЕНЕРАТОР АВТОМОБИЛЯ | 2004 |
|
RU2265133C1 |
| СТАРТЕР-ГЕНЕРАТОР | 2016 |
|
RU2650889C2 |
| СТАРТЕР-ГЕНЕРАТОР | 2004 |
|
RU2268391C2 |
| СТАРТЕР-ГЕНЕРАТОР | 2004 |
|
RU2270931C1 |
| Стартер-генератор с дифференциальным электроприводом и способ управления стартер-генератором | 2019 |
|
RU2711097C1 |
| ИНТЕЛЛЕКТУАЛЬНЫЙ СТАРТЕР-ГЕНЕРАТОР С ВОЗМОЖНОСТЬЮ САМОДИАГНОСТИКИ | 2016 |
|
RU2654209C2 |
| АВТОНОМНАЯ СТАРТЕР-ГЕНЕРАТОРНАЯ СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ | 2011 |
|
RU2460204C1 |
Группа изобретений относится к области авиационной техники и может быть использована в области винтокрылых ЛА с использованием системы привода винта, в частности гибридных БПЛА, а также для распределения и управления энергией винтокрылого ЛА. Стартер-генератор системы управления и передачи вращательного момента на винт БПЛА, выполненный в виде бесколлекторного синхронного электродвигателя с постоянными магнатами на роторе, обеспечивает запуск авиационного двигателя и электроснабжение бортовой системы. Плата управления стартером-генератором, состоящая из полупроводникового ключа, схемы заряда аккумуляторной батареи, контроллера, трехфазного силового каскада, датчиков Холла, относится к контроллеру для управления пуском двигателя БПЛА. Амортизатор, состоящий из моторамы с фланцем, предназначен для передачи нагрузок, создаваемых несущим винтом и двигателем на фюзеляж, для противодействия осевым и поперечным нагрузкам. Обеспечиваются бесперебойная передача вращательного момента на винт ЛА, перезапуск двигателя при перебоях в его работе без прерывания полета. 4 н. и 8 з.п. ф-лы, 8 ил.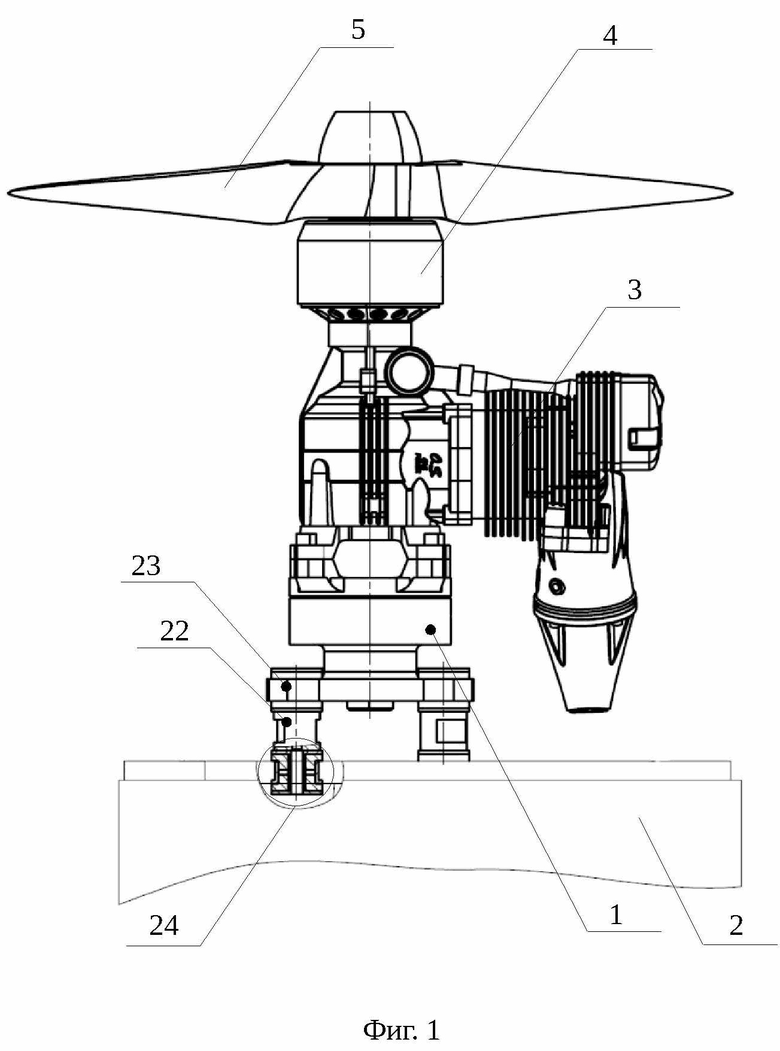
1. Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), включающая амортизатор для крепления системы на фюзеляж, двигатель, стартер-генератор, воздушный винт и плату управления стартером-генератором, осуществляющую переключение режимов работы стартера-генератора с режима запуска двигателя на режим генерирования электроэнергии соответственно, отличающаяся тем, что в качестве стартера-генератора используют бесколлекторный синхронный электродвигатель (БСЭ) с постоянными магнитами на роторе, размещенный на валу двигателя, который соединен разъемным соединением с ротором стартера-генератора для передачи вращающего момента на воздушный винт, вал двигателя размещен внутри статора стартера-генератора, стартер-генератор содержит статор с электромагнитными катушками и ротор с постоянными магнитами, работающий в двух режимах: стартера для двигателя и генератора для подзарядки аккумуляторов, а также стартер-генератор снабжен корпусом ротора и корпусом статора, и корпус ротора жестко соединен с воздушным винтом через штифты, а корпус статора жестко соединен с корпусом двигателя, воздушный винт закреплен на валу двигателя гайкой-втулкой через кок-обтекатель воздушного винта и жестко соединен с корпусом ротора посредством штифтов, стартер-генератор дополнительно снабжен датчиками положения ротора относительно электромагнитных катушек статора, расположенных в корпусе статора напротив торцевых частей постоянных магнитов ротора, в количестве по меньшей мере 3 (трех) датчиков, размещенных на корпусе статора и электрически соединенных с платой управления стартером-генератором, а система управления и передачи вращательного момента на винт, включая корпус двигателя, совместно со стартером-генератором и воздушным винтом закреплена на мотораме с размещенным на ней амортизатором, которая снабжена фланцем с узлами крепления на фюзеляже.
2. Система по п. 1, отличающаяся тем, что вал двигателя соединен с ротором шпоночным соединением или посадкой на конус.
3. Система по п. 1, отличающаяся тем, что датчики положения являются датчиками Холла.
4. Стартер-генератор системы управления и передачи вращательного момента на винт БПЛА, выполненный в виде бесколлекторного синхронного электродвигателя (БСЭ) с магнитами с чередующимися полярностями по п.1, который снабжен статором с расположенными на нем переключаемыми обмотками, отличающийся тем, что стартер-генератор содержит ротор, снабженный m штуками неодимовых постоянных магнитов радиального намагничивания, статор, снабженный n штуками электромагнитных катушек из электротехнической стали с трехфазной намоткой «виток к витку» медным проводом с соединением по схеме «треугольник» или «звезда», катушки электрически подключены к плате управления стартером-генератором с возможностью изменения режимов работы с режима стартера двигателя на режим генератора тока и обратно с обеспечением возможности контроля положения поворота ротора относительно статора, и посредством платы управления стартером-генератором обеспечен режим работы «стартер» на подачу электрического тока на обмотки статора, а в режиме «генератор» обеспечено преобразование трехфазного переменного электрического тока в однофазный постоянный с последующей передачей на полезную нагрузку, статор выполнен с внутренним цилиндрическим отверстием, сквозь которое с зазором проходит вал двигателя с возможностью его вращения и передачи крутящего момента на корпус ротора, и стартер-генератор обеспечивает следующие режимы работы: стартера - в зависимости от требуемого крутящего момента на валу двигателя посредством передачи переменного тока на обмотку статора путем поочередного переключения обмоток статора и смены полярности тока на них для передачи крутящего момента на вал двигателя или генератора - в зависимости от наличия полезной нагрузки посредством передачи преобразованного переменного тока в постоянный ток, при этом ротор жестко скреплен посредством втулки с фланцем и по меньшей мере двух пальцев с воздушным винтом.
5. Стартер-генератор по п. 4, отличающийся тем, что трехфазная намотка выполнена медным многожильным или одножильным проводом сечением «х».
6. Стартер-генератор по п. 4, отличающийся тем, что катушки электрически подключены к плате управления стартером-генератором с возможностью изменения режимов работы с режима стартера двигателя на режим генератора тока и обратно, при отслеживании режимов установленными на корпусе статора датчиками Холла.
7. Стартер-генератор по п. 4, отличающийся тем, что в качестве полезной нагрузки используют бортовую электрическую сеть и/или зарядку аккумуляторных батарей и подобных устройств.
8. Плата управления стартером-генератором системы управления и передачи вращательного момента на винт по п. 1, выполненная с возможностью преобразования в стартере-генераторе переменного тока в постоянный, что обеспечивает зарядку аккумулятора и питание полезной нагрузки, отличающаяся тем, что плата состоит из полупроводникового ключа, схемы заряда аккумуляторной батареи, контроллера, трехфазного силового каскада и по меньшей мере трех датчиков Холла, при этом датчики Холла электрически соединены с контроллером, посредством которого с выходов контроллера снимают показания режима работы стартера-генератора, а на вход контроллера поступает сигнал обратной связи с датчиков Холла, при этом угол между датчиками Холла выбран таким образом, чтобы за одно переключение обмоток бесколлекторного синхронного электродвигателя (БСЭ) поворот ротора БСЭ с магнитами оказывал влияние только на один из датчиков, при этом значение «открыт» или «закрыт» датчика меняется на противоположное, и посредством полупроводникового ключа обеспечивают переключение режимов работы стартера-генератора, для чего плата выполнена с возможностью перевода посредством трехфазного силового каскада стартера-генератора в режим передачи трехфазного тока с последующим преобразованием в постоянный ток и подачей его на нагрузку, при этом трехфазный силовой каскад состоит из трех транзисторных полумостов, которые обеспечивают открывание ключа таким образом, чтобы в любой момент времени ток протекал через две фазы обмоток БСЭ.
9. Амортизатор системы управления и передачи вращательного момента на винт по п. 1, состоящий из моторамы с фланцем, который соединен посредством вилки моторамы, имеющей ответные узлы крепления в крышке корпуса двигателя, при этом фланец размещен симметрично продольной оси стартера-генератора, и вилки моторамы, соединенной с фланцем моторамы, а фланец моторамы закреплен на шпангоутах фюзеляжа посредством вибродемпфирующих элементов, отличающийся тем, что фланец моторамы и шпангоуты фюзеляжа дополнительно снабжены по меньшей мере четырьмя стаканами каждый, в которых размещены упругопластические втулки, вилка моторамы опорной частью через подшипники закреплена на фланце моторамы посредством стопорного крепежного элемента, между вилкой и фланцем моторамы размещены четыре пальца, между которыми размещены сегментообразные демпферы, с помощью которых гасят вибрационные усилия, возникающие при работе силовой установки и воздушного винта и передающиеся на фюзеляж, стаканы фланца моторамы закреплены на стаканах шпангоутов фюзеляжа соответственно посредством оси, размещенной в стаканах фюзеляжа и фланца моторамы, причем между каждой парой стаканов размещена на этой же оси бобышка виброразвязки моторамы, являющаяся соединительным элементом.
10. Амортизатор по п. 9, отличающийся тем, что упругопластические втулки выполнены из резины или полиуретана, или силикона расчетной твердости от 5 до 80 единиц, измеренной по Шору.
11. Амортизатор по п. 9, отличающийся тем, что сегментообразные демпферы выполнены из резины или полиуретана, или силикона расчетной твердости «х», измеренной по Шору.
12. Амортизатор по п. 9, отличающийся тем, что ось снабжена фланцем с наворачивающейся на нее крепежной деталью с фланцем для соединения стаканов и виброразвязки.
| СПОСОБ РАСПРЕДЕЛЕНИЯ И УПРАВЛЕНИЯ ЭНЕРГИЕЙ ВИНТОКРЫЛОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ГИБРИДНОЙ СИСТЕМОЙ ПРИВОДА ВИНТА | 2018 |
|
RU2694695C1 |
| ИНТЕГРИРОВАННЫЙ ВЫСОКОТЕМПЕРАТУРНЫЙ СТАРТЕР-ГЕНЕРАТОР И СПОСОБ УПРАВЛЕНИЯ ИМ | 2015 |
|
RU2583837C1 |
| Адаптивная стартер-генераторная система для летательных аппаратов | 2019 |
|
RU2713390C1 |
| ОПОРА ДЛЯ УСТАНОВКИ ГЛАВНОГО РЕДУКТОРА С НЕСУЩИМ ВИНТОМ | 2007 |
|
RU2343089C2 |
| EP 3009666 A1, 20.04.2016 | |||
| WO 9318320 A1, 16.09.1993. | |||

