Известны ленточные тормоза дифференциального типа, выполненные в виде тормозного барабана с обхватывающей его гибкой лентой, ветви которой связаны с рычажной системой, имеющей неподвижную точку качания, располом :енную мелсду ветвями. Расчеты этих тормозов обычно основываются на уравнении Эйлера для гибкой нити, огибающей цилиндр: где 5i и 5г - натяжения концов нити; е - основание натуральных логарифмов;J.I - коэффициент трения нити о новерхность цилиндра; а - угол обхвата цилиндра нитью. Это уравнение выведено для гибкой нерастяжимой и невесомой нити, скользящей но неподвнжному цилиндру, при условии, что коэффициент трения НИТИ о новерхность цилиндра постоянен но всей дуге обхвата. Тормозные ленты во многом отличаются от гибкой ннтн. В ленточных тормозах коэффициент трения тормозной ленты о барабан непостоянен но дуге обхвата (.i const). По этим причинам расчеты ленточных тормозов по уравнению Эйлера не обеспечивают необходимой точности н требуют в каждом конкретном случае практической корректировки. Степень точности расчета по уравнению (1) зависит от достоверности выбранного значения коэффициента трения i.i, нод которым слеует понимать некоторый условный, приведенTVPTHbiii коэффициент трения по всей дуге обхвата, учитывающий также н степень несоответствия тормозной ленты ЗДеальной гибкой нити. Итак, при расчете ленточных тормозов коэффициент трения должен выбираться таким, чтобы отнги:.ение натяжений концов идеальной гибкой нити, подсчитанное но уравнению (1), было равно действительному отноиленню натяжений концов тормозной ленты ленточного тормоза, имеющего одинаковый с гибкой нитью угол обхвата. При оиытно-конструкторских работах приведенный коэффициент трения ленточного тор1 оза обычно определяют на основании экснерименталыгых данных. Основная трудность подготовки эксперимента заключается в обеспечении возможности замера крутящего (тормозного) момента на тормозном барабане. Предлагаемый ленточный тормоз-измеритель дифференцнального типа, содержащий юрмозной барабан и обхватывающую его ленту, ветви которой связаны с рычажной С1;сте юй, имеющей неподвижную точку качания, расположенную между ветвями.
отличается тем, что рычажная система тормоза-измерителя имеет нагрузочныр рычаг, связанный со сбегающей ветвью гибкой ленты и шарнирно связанный с одним плечом качающегося двуплечего рычага, другое плечо которого связано с набегаюи1ей ветвью гибкой ленты и снабжено неподвижно Лстановленными ограничителями угла его поворота. Такая конструкция тормоза позволяет определять приведенный коэффициент тренкя и тормозной момент как самостоятельные величины без необходимости замера крутящего момента на тормозном барабане. Кроме того, в ленточном тормозе-измерителе в качестве ограничителя jOBOpOTa его двуплечего рычага может быть ислользован маятниковый груз, стержень которого жестко закреплен в срелисн части двуплечего рычага.
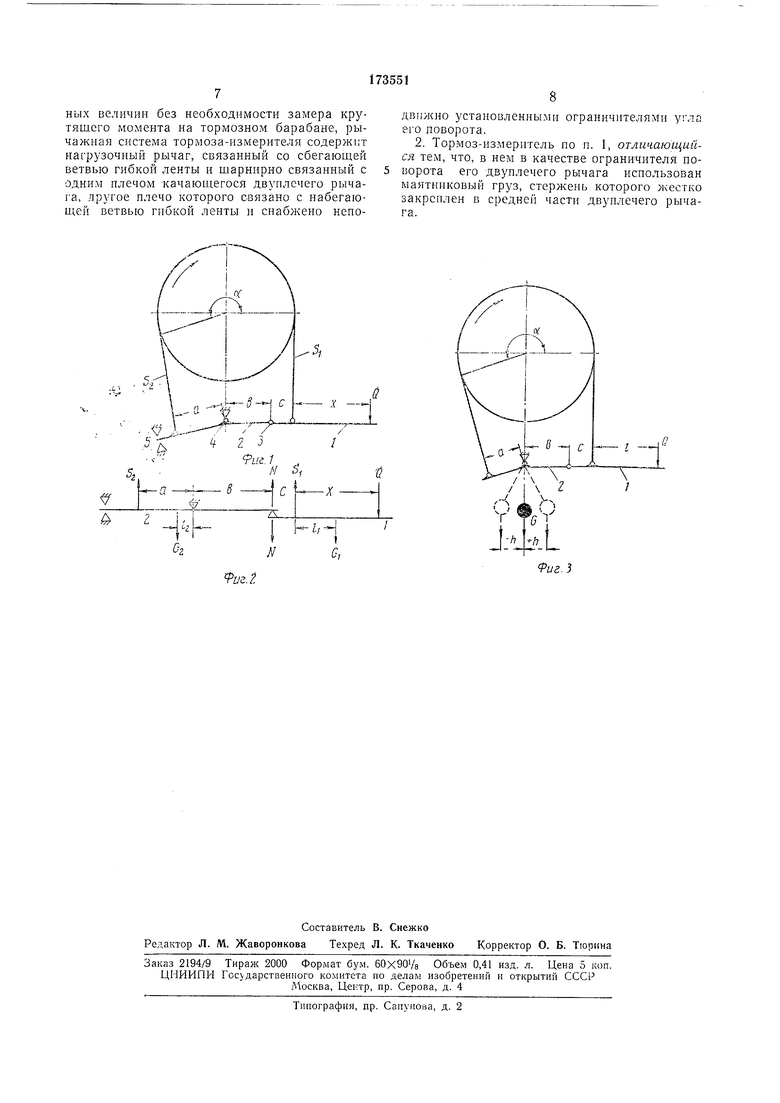
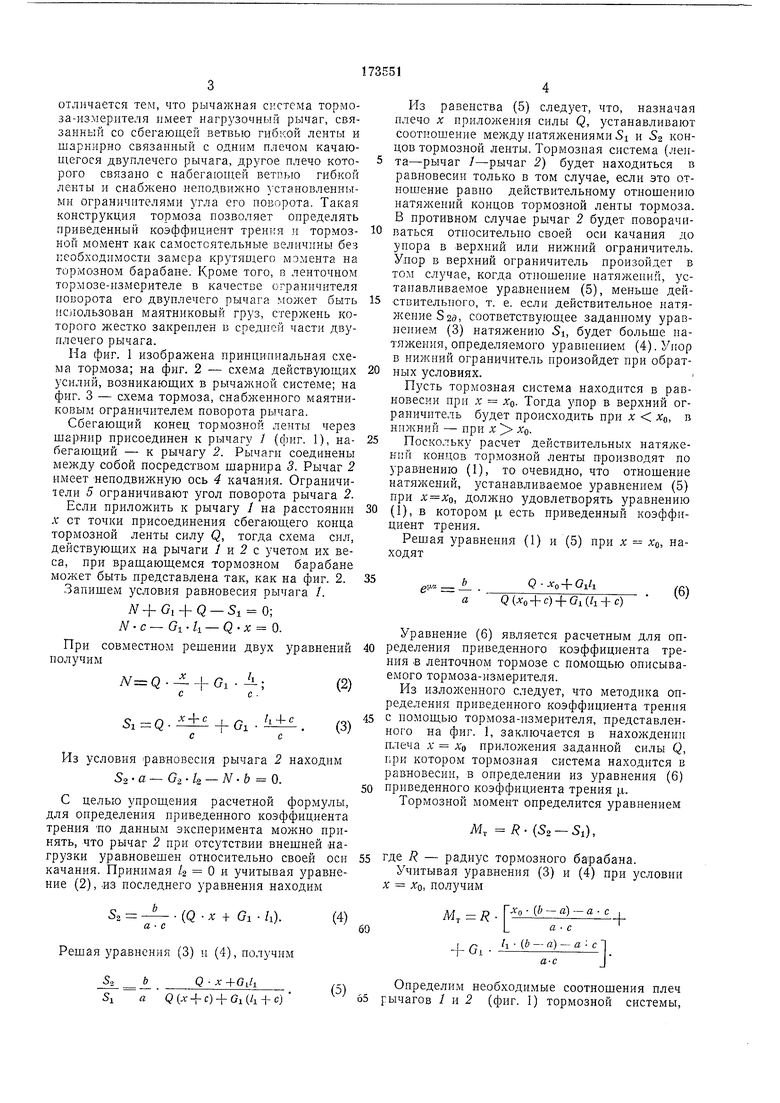
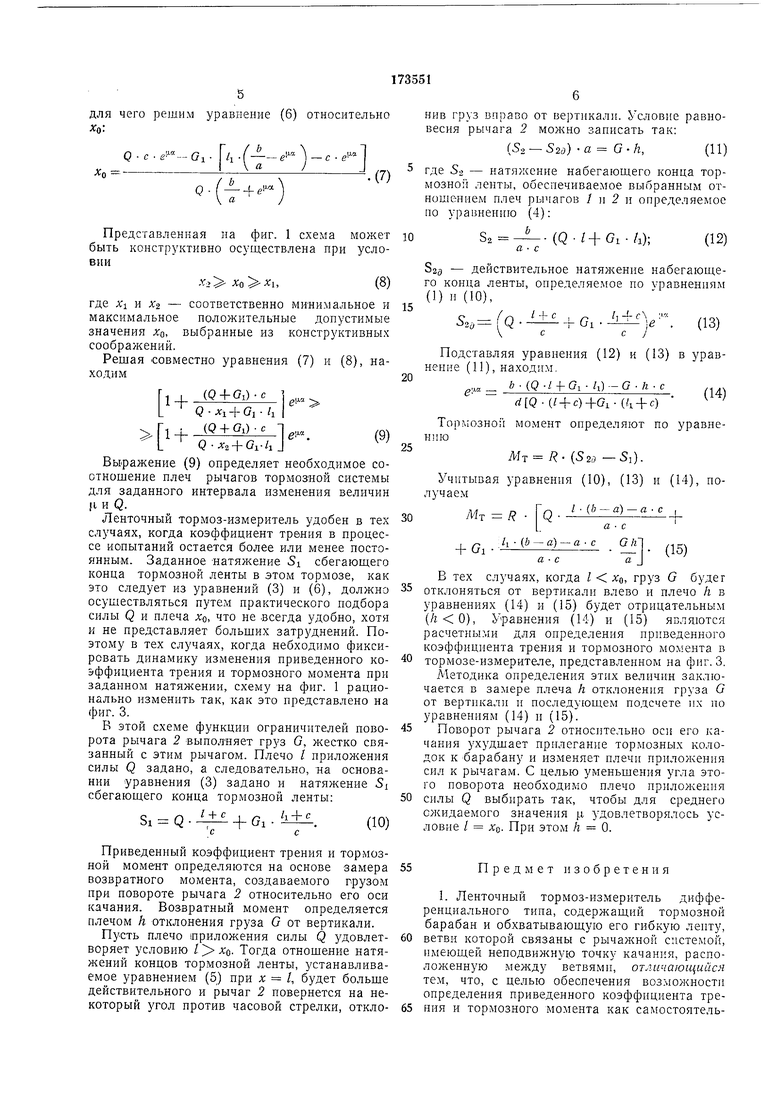
На фиг. 1 изображена принципиальная схема тормоза; на фиг. 2 - схема действующих усилий, возникающих в рычажной системе; на фиг. 3 - схема тормоза, снабженного маятниковым ограничителем поворота рычага.
Сбегающий конец тормозной ленты через шар«ир присоединен к рычагу / (cjnir. 1), набегающий - к рычагу 2. Рычаги соединены между собой посредством щарнира 5. Рычаг 2 имеет неподвижную ось 4 качания. Ограничители 5 ограничивают угол поворота рычага 2.
Если приложить к рычагу / на расстоянии Л ст точки присоединения сбегающего конца тормозной ленты силу Q, тогда схема сил, действующих на рычаги / и 2 с учетом их веса, при вращающемся тормозном барабане может быть представлена так, как на фиг. 2.
Запищем условия равновесия рычага /.
7V + G, + Q - 5i 0; Л. с - GI /1 - Q . л: 0.
При совместном решении двух уравнений получим
.G, . А;
(2)
с
5,Q.± + Gi.
(3)
Из условия равновесия рычага 2 находим 5, а - С. 4 - Л & 0.
С целью упрощения расчетной формулы, для определения приведенного коэффициента трения ПО данным эксперимента можно принять, что рычаг 2 при отсутствии внещней нагрузки уравновещен относительно своей оси качания. Принимая /2 О и учитывая уравнение (2), из последнего уравнения находим
5г - (Q л- + GI /i).
(4)
а с
Из равенства (5) следует, что, назначая плечо к приложения силы Q, устанавливают соотиощеиие между натяжениями Si и 52 концов тормозной ленты. Тормозная система (леита-рычаг /-рычаг 2) будет находиться в равновесии только в том случае, если это отношение равно действительному отношению натяжений концов тормозной ленты тормоза. В противном случае рычаг 2 будет поворачиваться относительно своей оси качания до упора в верхний или нижний ограничитель. Упор в верхний ограничитель произойдет в том случае, когда отиошепие иатяжемий, устанавливаемое уравнепием (5), меньше действительпого, т. е. если действительное натяжение 825, соответствующее заданному уравнением (3) натяжению 5i, будет больще иатяжения,определяемого уравнепием (4). Упор в нижний ограничитель произойдет при обратных условиях.
Пусть тормозная система находится в равновесии при к XQ. Тогда зшор в верхний ограничитель будет происходить при ;с Хо, в нижний - при X XQ.
Поскольку расчет действительных натяжений концов тормозной ленты производят по уравнению (1), то очевидно, что отношение натяжений, устанавливаемое уравнением (5) при х,-к, должно удовлетворять уравнению
(1), в котором 1-1 есть приведенный коэффициент трения.
Рещая уравнения (1) и (5) при х. XQ, находят
Q.xo + Gili
g|J.(Z
(6)
Q( + f) + Gi(/H-c)
Уравнение (6) является расчетным для определения приведенного коэффициента трения в ленточном тормозе с помощью описываемого тормоза-измерителя.
Из изложенного следует, что методика определения приведенного коэффициента трения с помощью тормоза-измерителя, представленного на фиг. 1, заключается в нахождении плеча X Хо приложения заданной силы Q, при котором тормозная система находится в равновесии, в оиределении из уравнения (6) приведенного коэф)фициента трения ц.
Тормозной момент определится уравнением
М, R- (82 -Si),
где R - радиус тормозного барабана.
Учитывая уравнения (3) и (4) при условии X Хо, получим
м./. с
li (b - а) - а с
для чего решим уравнение (6) относительно XQ: HiQ.c. - е -с е Q. . а Представленная на фиг. 1 схема может быть конструктивно осуществлена при условии,(8) где Al и Xz - еоответственно мннимальное и максимальное положительные допустимые значения Хо, выбранные из конструктивных соображений. Решая совместно уравнения (7) и (8), находим (Q + Gi)-c Q-Xi + Gi- li (Q + GI) n j (9 -f GI) с 1 .i.(9) + Gi L Q- 2-fGi./iJ Выражение (9) определяет необходимое соотношение плеч рычагов тормозной системы для заданного интервала изменения величин 1 и Q. Ленточный тормоз-измеритель удобен в тех случаях, когда коэффициент трения в процессе испытаний остается более или менее постоянным. Заданное Натяжение 5i сбегаюш,его конца тормозной ленты в этом тормозе, как это следует из уравнений (3) и (6), должно осуществляться путем практического подбора силы Q и плеча хо, что не всегда удобно, хотя и не представляет больших затруднений. Поэтому в тех случаях, когда небходимо фиксировать динамику изменения приведенного коэффициента трения и тормозного момента при заданном натяжении, схему на фиг. 1 рационально изменить так, как это представлено на фиг. 3. В этой схеме функции ограничителей поворота рычага 2 выполняет груз G, жестко связанный с этим рычагом. Плечо / приложения силы Q задано, а следовательно, на основании уравнения (3) задано и натяжение 5i сбегающего конца тормозной ленты: Si Q.
Приведенный коэффициент трения и тормозной момент определяются на основе замера возвратного момента, создаваемого грузом при повороте рычага 2 относительно его оси качания. Возвратный момент определяется плечом h отклонения груза G от вертикали.
Пусть плечо ириложения силы Q удовлетворяет условию / XQ. Тогда отношение натяжений концов тормозной ленты, устанавливаемое уравнением (5) при х I, будет больше действительного и рычаг 2 повернется на некоторый угол против часовой стрелки, отклоПредмет изобретения
55
1. Ленточный тормоз-измеритель дифференциального типа, содержащий тормозной барабан и обхватывающую его гибкую леиту,
ветви которой связаны с рычал ной системой, имеющей неподвижную точку качания, расположенную между ветвями, отличающийся тем, что, с целью обеспечения возможности определения приведенного коэффициента тренив груз вправо от ве)тикали. Условие равновесия рычага 2 можно записать так: (5, -52d) -а G-ft,(11) где S-y - натяжение набегающего конца тормозной ленты, обеспечиваемое выбранным отношением плеч рычагов / и 2 и определяемое по уравнению (4): (Q-/+Gi./a);(12) 825 - действительное натяжение набегающего конца ленты, определяемое по уравнениям (1) и (10), &. (Q. Подставляя уравнения (12) и (13) в уравнение (11), находим, & (Q -/-bOi /i) -G /г с .(;4-c)+Gi-(;i + c) Тормозной момент определяют по уравнениюМт R- (S2i -Si). Уч 1тывая уравнения (10), (13) и (14), получаемВ тех случаях, когда / х, груз G будет отклоняться от вертикали влево и плечо /г в уравнениях (14) и (15) будет отрицательным (), Уравнения (14) и (15) являются расчетными для определения приведенного коэффициента трения и тормозного момента в тормозе-измерителе, представленном на фиг. 3. Методика определения этих величин заключается в замере плеча h отклонения груза G от вертикали и последующем подсчете их по уравнениям (14) и (15). Поворот рычага 2 относительно ocii его качания ухудшает прилегание тормозных колодок к барабану и изменяет плечи приложения сил к рычагам. С целью уменьшения угла этого поворота необходимо плечо приложения силы Q выбирать так, чтобы для среднего ожидаемого значения |.i удовлетворялось условие / XQ. При этом /г 0.
ных величин без необходимости замера крутяшего момента на тормознод барабане, рычажная система тормоза-нзмерителя содержит нагрузочный рычаг, связанный со сбегающей ветвью гибкой ленты н нларнирно связанный с одним плечом качающегося двунлечего рычага, другое плечо которого связано с набегающей ветвью гибкой ленты и снабжено непо | г| -I kz
,
9иг.г
движно установленнымн ограничителями угла его поворота.
2. Тормоз-измеритель по п. 1, отличающийся тем, что, в нем в качестве ограничителя поворота его двуплечего рычага использован маятниковый груз, стержеиь которого жестко закреплен в сред,ней части двуплечего рычага.
1
иг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕНТОЧНО-КОЛОДОЧНЫЙ ТОРМОЗ БУРОВОЙ ЛЕБЕДКИ С МНОГОПАРНЫМИ УЗЛАМИ ТРЕНИЯ | 2012 |
|
RU2513964C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ПРИ КВАЗИЛИНЕЙНОЙ ЗАКОНОМЕРНОСТИ ИХ ИЗМЕНЕНИЯ В ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗАХ БУРОВЫХ ЛЕБЕДОК | 2010 |
|
RU2507423C2 |
| Ленточно-колодочный тормоз с равнонагруженными лентами буровой лебедки | 2012 |
|
RU2612274C2 |
| СПОСОБ РАЦИОНАЛЬНОГО РАЗМЕЩЕНИЯ ФРИКЦИОННЫХ НАКЛАДОК С РАЗЛИЧНЫМИ ИЗНОСО-ФРИКЦИОННЫМИ СВОЙСТВАМИ ИХ МАТЕРИАЛОВ НА ТОРМОЗНОЙ ЛЕНТЕ ЛЕНТОЧНО-КОЛОДОЧНОГО ТОРМОЗА | 2012 |
|
RU2531535C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ЛЕНТОЧНО-КОЛОДОЧНЫХ ТОРМОЗОВ БУРОВЫХ ЛЕБЕДОК С НЕПОДВИЖНЫМИ НАКЛАДКАМИ НА ТОРМОЗНОЙ ЛЕНТЕ | 2010 |
|
RU2489619C2 |
| СПОСОБ УПРАВЛЕНИЯ УДЕЛЬНЫМИ НАГРУЗКАМИ НА ВЕТВЯХ ТОРМОЗНОЙ ЛЕНТЫ ЛЕНТОЧНО-КОЛОДОЧНОГО ТОРМОЗА БУРОВОЙ ЛЕБЕДКИ | 2007 |
|
RU2357132C2 |
| ЛЕНТОЧНО-КОЛОДОЧНЫЙ ТОРМОЗ | 2004 |
|
RU2299368C2 |
| ЛЕНТОЧНО-КОЛОДОЧНЫЙ ТОРМОЗ | 2010 |
|
RU2460911C2 |
| ЛЕНТОЧНО-КОЛОДОЧНЫЙ ТОРМОЗ С СЕКЦИОННЫМИ ФРИКЦИОННЫМИ НАКЛАДКАМИ НА ТОРМОЗНОЙ ЛЕНТЕ | 2009 |
|
RU2432510C2 |
| УСТРОЙСТВО И СПОСОБ ВЫРАВНИВАНИЯ УДЕЛЬНЫХ НАГРУЗОК В ПАРАХ ТРЕНИЯ ЛЕНТОЧНО-КОЛОДОЧНОГО ТОРМОЗА БУРОВОЙ ЛЕБЕДКИ | 2012 |
|
RU2521138C2 |