Изобретение относится к автоматическим следящим системам, а именно к электрооптическим измерителям местоположения движущегося объекта, и может быть использовано для измерения и коррекции перекоса движущейся судовозной камеры судоподъемника поперечного типа, а также других крупных инженерных сооружений при их движении, например мостовых кранов и слипов.
Известно устройство для измерения величины перекоса судовой камеры, состоящее из двух электрооптических устройств для измерения расстояний, приемопередатчики которых установлены на здании подъемных машин, а отражатели помещены на края камеры судоподъемника Измеряется
расстояние между приемопередатчиками и соответствующими отражателями, при этом разность измеренных расстояний дает величину перекоса камеры. Недостатками таких устройств являются сложность устройства, вызванная необходимостью применения двух электрооптических дальномеров, низкая точность измерений, обусловленная медленным действием приемных устройств (одно измерение за 10-15 с, при движении камеры со скоростью 1,2-1,5 м/с), а также отсутствие автоматизации процесса коррекции перекоса.
Наиболее близким к изобретению является устройство для измерения расстояний, содержащее генератор масштабной частоты, излучатель, коммутатор измерительного
4 СО СЛ 00
2
и опорного каналов, фотоприемник, гетеродин и цифровой фазометр с генератором управляющих импульсов. Устройство обладает высоким быстродействием (одно измерение за 0,1-0,2 с).
Недостатком этого устройства является сложность конструкции (необходимо также применение двух электрооптических дальномеров) и отсутствие автоматизации процесса коррекции перекоса. Сложность конструкции обусловлена совмещением приемного и передающего оптических кана- лов в корпусе одного приемопередатчика, в котором расположен также и опорный оптический канал.
Цель изобретения - повышение точности измерений и автоматизация процесса коррекции перекоса движущейся судоподъемной камеры.
Цель достигается тем, что устройство дополнительно содержит первый и второй световоды, установленные на камере судоподъемника, первый и второй передающие объективы, установленные на здании подъемных машин, первый и второй приемные объективы, третий и четвертый световоды, второй расщепитель, второй фотоприемник, оптический переключатель, цифроана- логовый преобразователь и исполнительный механизм, причем выход излучателя через первый расщепитель оптически связан с входами первого и второго световодов, выходы которых соответственно через первые передающий и приемный и вторые передающий и приемный объективы опти- чески связаны с входами третьего и четвертого световодов, выход третьего световода связан с первым входом оптического переключателя, выход которого связан с оптическим входом первого фотоприемника, выход четвертого световода связан с оптическим входом второго фотоприемника через второй расщепитель, второй выход которого соединен с вторым входом оптического переключателя, выход второго фото- приемника подключен к входу формирователя управляющих импульсов, управляющий вход оптического переключателя связан с выходом коммутатора, второй выход гетеродина связан с электрическим входом второго фотоприемника, а управляющий выход счетчика через цифроаналоговый преобразователь подключен к входу исполнительного механизма.
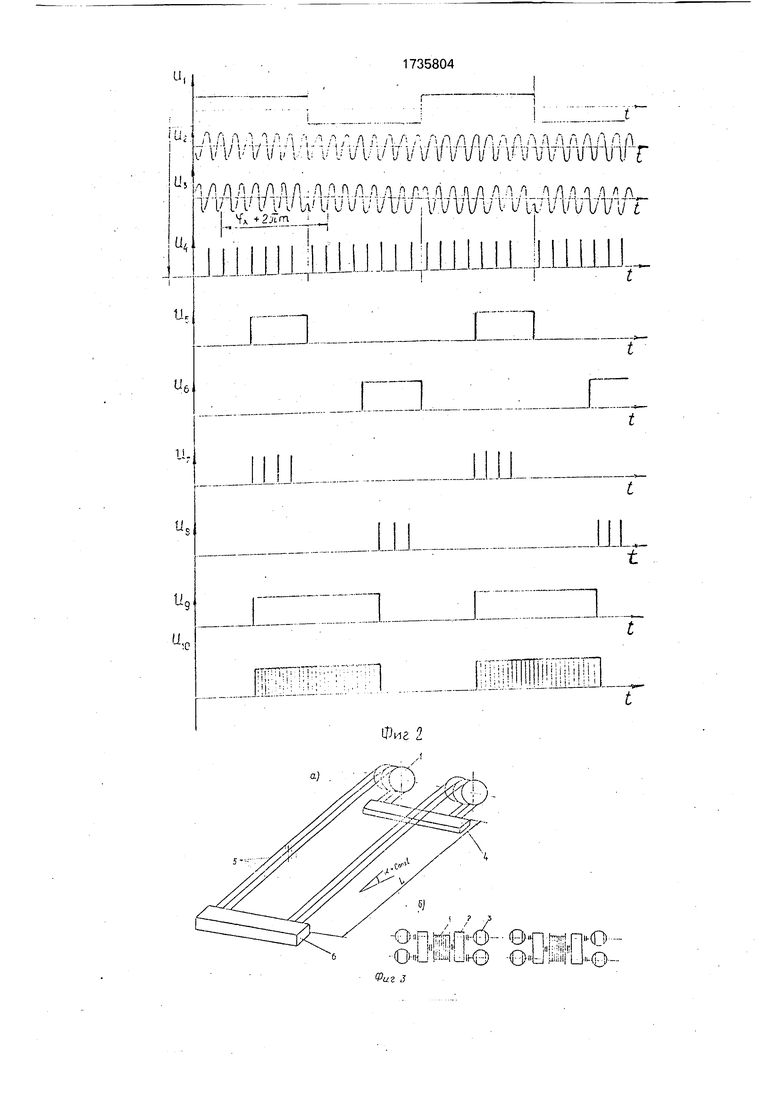
На фиг. 1 показана блок-схема устрой- ства; на фиг. 2 - эпюры напряжений, поясняющие работу схемы; на фиг. 3 - принципиальная схема судоподъемника поперечного типа; на фиг. 4 - блок-схема исполнительного механизма управления приводом.
Устройство содержит передатчик 1, состоящий из генератора 2 масштабной частоты, излучателя 3, расщепителя 4, линз 5 и 6, световодов 7 и 8, передающих объективов 9 и 10, приемник 11, состоящий из приемных объективов 12 и 13, световодов 14 и 15, линз 16, 17 и 20, коммутатора 19 с зеркальной шторкой 18, фотоприемников 21 и 23, расщепителя 22 и гетеродина 24; цифровой фазометр 25, состоящий из формирователя 26 импульсов, схем 27 и 28 совпадения, генератора 29 управляющих импульсов, триггера 30, ключа 31, генератора 32 счетных импульсов, счетчика 33 числа импульсов и цифрового индикатора 34, а также цифроаналоговый преобразователь 35 с исполнительным механизмом 36.
Передатчик 1 расположен на судовоз- ной камере, которая с помощью многоканатной системы движется относительно здания подъемных машин. Генератор 2 масштабной частоты вырабатывает высокочастотные колебания, которые поступают на излучатель 3 и модулирует его излучение. Модулированный световой поток поступает на расщепитель 4, представляющий собой полупрозрачную пластину, пропускающую на линзу 5 и отражающую на линзу 6 одинаковые световые потоки.
В фокусе линз 5 и 6 установлены входные торцы цилиндрических волоконных световодов 7 и 8, выходные торцы которых расположены в фокусе передающих объективов 9 и 10. Объективы 9 и 10 передатчика устанавливаются на краях судовозной камеры на расстоянии 60-70 м друг от друга. Световоды 7 и 8 прокладываются в неопасных для механического повреждения местах камеры. Оптические оси передающих объективов расположены параллельно железнодорожным путям судоподъемника.
Приемник 11 расположен на здании подъемных машин. Оптические оси разнесенных приемных объективов 12 и 13 совмещены с осями объективов 9 и 10 передатчика 1. Модулированный световой сигнал, передаваемый объективом 9, принимается объективом 12; сигнал, передаваемый объективом 10, принимается объективом 13. Указанная параллельность оптических осей и высокая точность прокладки путей судоподъемника в плане и по высоте обеспечивают непрерывную передачу светового сигнала при движении камеры во всем требуемом диапазоне расстояний. В фокусах объективов 12 и 13 помещены входные торцы световодов 14 и 15, выходные торцы которых установлены в фокусах линз 16 и 17. Вторые фокусы этих линз совмещены на зеркальной шторке 18 коммутатора 19. Коммутатор вибрационного типа позволяет переключить свет с частотой до 100 Гц от внешнего управляющего сигнала (фиг. 2).
Световой поток поочередно от линзы 16, когда шторка 18 отодвинута, или от линзы 17, когда пучок отражается от зеркала шторки, попадает через линзу 20 на фотоприемник 21. Отрезок пути от расщепителя 4 до шторки 18, включающий расстояние между объективами 9 и 12, называется измерительным каналом. Отрезок пути, включающий расстояние между объективами 10 и 13, называется опорным каналом. В части опорного канала, размещенной в приемнике 11, расположен расщепитель 22, отводящий часть светового потока на фотоприемник 23. С гетеродина 24 на фотоприемники 21 и 23 подается напряжение гетеродинной частоты. На выходе фотоприемника 23 выделяется непрерывное напряжение U2 низкой частоты, представляющей собой разностную частоту между масштабной и гетеродинной частотами. На выходе фотоприемника 21 выделяются пакеты напряжений изи и из0, несущие измерительную и опорную фазы масштабного колебания. В связи с наличием перекоса камеры относительно здания машин фаза сигнала, прошедшего измерительной канал, будет несколько опережать фазу или запаздывать по отношению к фазе сигнала, прошедшего опорный канал. Поэтому пакеты 11зи и Us0 сдвинуты по фазе для моментов перехода через нуль мгновенных значений сравниваемых колебаний на величину
р - УХ + 2 Jt т ,
где (/ - искомая разность фаз; m - целое число фазовых циклов.
Пакеты сигналов Узи и Us0 поступают в цифровой фазометр 25, на входе которого имеется формирователь 26, представляющий собой нуль-орган, действие которого сводится к генерированию коротких импульсов 1)4 в моменты перехода мгновенных значений напряжений 1)з через нуль. С выхода формирователя импульсы 1М поступают на две схемы 27 и 28 совпадения. Схемы совпадения срабатывают поочередно от генератора 29. На второй вход схемы 27 подается импульс Us. Импульс присутствует на входе схемы 27 совпадения в интервале времени, в течение которого на первом входе той же схемы совпадения имеет место пакет импульсов 11зи, задаваемых световым сигналом, поступившим из измерительного канала.
Начало импульса Us приходится на середину пакета Узи.
На второй вход схемы 28 совпадения подается импульс Ue, действующий уже в
интервале времени, в течение которого на схему 28 приходит пакет импульсов 11з°, задаваемых световым сигналом, поступившим с опорного канала. Начало импульса Ue приходится на середину пакета Us0. За время действия импульса Us через схему 27 совпадения пройдет пакет импульсов за время действия импульса Ue через схему 28 совпадения пройдет пакет импульсов Us. Первый импульс пакета U переключит тригrep 30 и положит начало импульсу Ug, a первый импульс из пакета Us снова переключит триггер 30 и закончит импульс Ug. Импульс Ug отпирает ключ 31, который пропускает от генератора 32 счетных импульсов
определенное число импульсов Uio. Количество N в последовательности определяется выражением
25
N mNi + nx rn у+ пх,
где m - целое число; - количество счетных импульсов, сумма периодов повторения которых равна одному периоду
колебаний низкой (разностной) частоты; Т - период колебаний разностной частоты; г- период следования счетных импульсов; пх - число счетных импульсов, пропорциональных рх(0 nx Ni).
Последовательность импульсов N поступает на счетчик 33 числа импульсов. Так как емкость счетчика равна NI, то он производит пересчет числа импульсов mNi и в момент остановки запомнит только число
импульсов пх. Со счетчиком 33 связан цифровой индикатор 34, на котором отражается разность фаз р. в дискретной цифровой форме. Цифровой код, записанный в счетчике 33, поступает в цифроаналоговый преобразователь 35. Выходной сигнал преобразователя, несущий информацию о величине и знаке перекоса, управляет исполнительным механизмом 36, корректирующим перекос камеры за счет регулирования
режима работы двигателей подъемных машин судоподъемника.
Для обеспечения работы цифрового фазометра 25 в одноканальном режиме, необ- ходима кратность между собой разностной частоты U2, частоты коммутации каналов Ui и частоты повторения импульсов Ue и U. Для этой цели на вход генератора 29 управляющих импульсов с выхода фотоприемника 23 поступает непрерывный сигнал разностной частоты.
При масштабной частоте 15 МГц, разностной частоте 1,5 кГц и счетной частоте 15 МГц, погрешность считывания составит ±1 мм.
При частоте коммутации 50 Гц продолжительность одного измерения 0,2 с и погрешность измерений ±10 мм. При применении в качестве излучателя полупро- водникового непрерывного лазера на арсе- ниде галлия дальность действия составит 1000м.
В качестве триггера 30 может быть использован, например, триггер, который ера- батывает при подаче на один его вход только первого импульса; его состояние от других импульсов на входе не изменяется, а импульс Us появится только через целое число периодов промежуточной частоты,
В тексте описания, в части раскрытия формулы общей последовательности импульсов N, указано: последовательность импульсов поступает на счетчик 33 числа импульсов. Так как емкость счетчика равна NI, то он производит пересчет числа импульсов и в момент остановки запомнит только число импульсов пх.
Схема совпадения воспринимает с триггера 30 либо положительный сигнал (при ( 0), либо инвертированный (при р 0), U9.
Таким образом, на счетчик 33 начнут поступать импульсы с переходом из О в 1 - в первом случае и с 1 в О - во втором. Индикатор 34 состоит из полупроводниковых светодиодных индикаторов с дешифраторов кода счетчика 33.
Предполагается, что счетчик 33 позволяет срабатывать как по положительным, так и по отрицательным периодам передаваемого на него напряжения и тем самым определять знак /.
Пример. Судовозная камера, напри- мер Богучанского судоподъемника, имеющая ширину около 60 м, допускает перекосы до 30 см (допускаемый угол перекоса а нормируется по аналогии с мостовыми кранами, для которых iga 1/5000).
Для раскрытия конкретного содержания исполнительного механизма 36 приведена принципиальная схема судоподъемника (фиг. За, 36), где приняты следующие обозначения: канатоведущий орган 1 много- канатной машины фрикционного типа, редукторы 2, подъемные двигатели 3, противовес4, подъемные канаты 5. судовоз- ная камера 6.
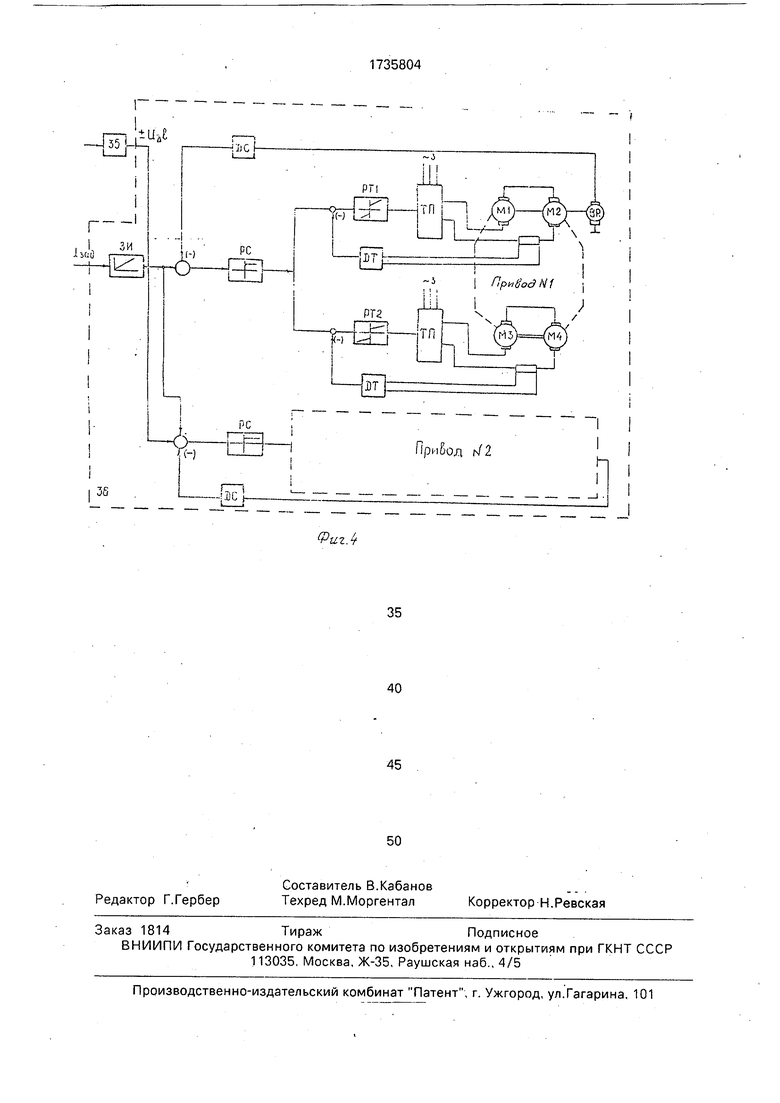
Исполнительный механизм 36 представлен на фиг. 4. Здесь подробно представлена структурная схема для привода № 1 (с четырьмя электродвигателями, соединенными последовательно и параллельно). Аналогично выполнена схема привода № 2. На фиг. 4 обозначены отдельные элементы, которые входят в стандартизированную систему УВСР/АИ: датчик скорости (ДС); задатчик интенсивности (ЗИ); регулятор скорости (PC); регуляторы тока (РТ1, РТ2); датчик тока (ДТ); тиристорный преобразователь (ТП); двигатели привода М1-М4; тахо- генератор (BR); напряжение, пропорциональное отклонению по пути U i; напряжение задания скорости и3ад.
Система управления выполнена по принципу подчиненного регулирования и настраивается на технический оптимум, для которого характерна ошибка регулирования, не превышающая 5%.
Корректирующая связь по пути с цифро- аналогового преобразователя 35 складывается с сигналом задания скорости (PC), поступающим на регулятор скорости второго привода.
Формирователь 26 состоит из компаратора напряжения и одновибратора, что позволяет сформировать из синусоидального сигнала импульсный сигнал (выполнен на одной микросхеме).
Генератор 29 управляющих импульсов представляет собой делитель частоты и схемы совпадения.
Напряжения на схемах совпадения получают с помощью различных комбинаций выходов делителя частоты точки ЦАП 35 представляет собой цифроаналоговый преобразователь, например, серии К572.
Формула изобретения
Устройство для измерения и коррекции перекоса камеры судоподъемника, содержащее последовательно соединенные генератор масштабной частоты и излучатель, а также первый расщепитель, коммутатор и последовательно соединенные гетеродин, первый фотоприемник и цифровой фазо- мер, содержащий формирователь управляющих импульсов, генератор счетных импульсов, первый элемент И, последовательно соединенные формирователь управляющих импульсов, генератор счетных импульсов, первый элемент И и последовательно соединенные формирователь управляющих импульсов, генератор счетных импульсов, первый элемент И и последовательно соединенные формирователь фазовых импульсов, второй элемент И, триггер, ключевой элемент, счетчик и цифровой индикатор, причем первый и второй выходы
формирователя управляющих импульсов связаны с вторыми входами соответственно первого и второго элементов И, выход генератора счетных импульсов связан с управляющим входом ключевого элемента, первый элемент И подключен своим выходом к второму входу триггера, а первым входом - к выходу формирователя фазовых импульсов, третий выход формирователя управляющих импульсов подключен к входу коммутатора, отличающееся тем, что, с целью повышения точности, оно дополнительно содержит первый и второй световоды, установленные на камере судоподъемника, первый и второй передающие объективы, установленные на здании подъемных машин, первый и второй приемные объективы, третий и четвертый световоды, второй расщепитель, второй фотоприемник, оптический переключатель, цифроаналоговый преобразователь и исполнительный механизм, причем выход излучателя через первый расщепитель оптически связан с
й
входами первого и второго световодов, выходы которых соответственно через первые передающий и приемный и вторые передающий и приемный объективы оптически свя5 заны с входами третьего и четвертого световодов, выход третьего световода связан с первым входом оптического переключателя, выход которого связан с оптическим входом первого фотоприемника, выход чет10 вертого световода связан с оптическим входом второго фотоприемника через второй расщепитель, второй выход которого соединен с вторым входом оптического переключателя, выход второго фотоприемника
15 подключен к входу формирователя управляющих импульсов, управляющий вход оптического переключателя связан с выходом коммутатора, второй выход гетеродина связан с электрическим входом второго фото- 20 приемника, а управляющий выход счетчика через цифроаналоговый преобразователь подключен к входу исполнительного механизма.



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения расстояний | 1980 |
|
SU870919A2 |
| Устройство для измерения расстояний | 1981 |
|
SU977956A2 |
| Устройство для измерения расстояний | 1976 |
|
SU586701A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЙ | 1990 |
|
RU2031365C1 |
| Электрооптический дальномер | 1978 |
|
SU764461A1 |
| ДАЛЬНОМЕР-ТАХЕОМЕТР | 1993 |
|
RU2062981C1 |
| Устройство для обработки допплеровского сигнала лазерного анемометра | 1980 |
|
SU888042A1 |
| ЦИФРОВОЙ ТЕЛЕВИЗОР | 2003 |
|
RU2246796C1 |
| Устройство для измерения расстояний | 1979 |
|
SU853386A2 |
| Устройство для измерения положения и диаметра объекта | 1987 |
|
SU1441200A1 |

Изобретение относится к автоматическим следящим системам и может быть использовано для коррекции перекоса движущейся судовозной камеры судоподъемника поперечного типа. Устройство содержит генератор масштабной частоты, излучатель, коммутатор измерительного и опорного каналов, фотоприемник, гетеродин, цифровой фазометр с генератором управляющих импульсов, дополнительный фотоприемник в опорном канале, связанный с гетеродином и генератором управляющих импульсов. Цель изобретения - повышение точности измерений и обеспечение возможности автоматизации процесса коррекции 4 ил. сл
К}мЈри Ј4ЬЧа ьа зл If 1
т .
u, г гj-7 Uu8
- Ue
Збзпие маи;им
lf7 f6 / SO
гU,
Ш
U9
Ue
IJ.-pj
Фиг.
c;
L
d
Г
tTi
D
p
fT
c-,
C
e-P3
cr
i
C
Т
г
di-
--
srr
n
ZJ
i QQt s
czg ifl
©6
Jl
cr
ca
о
3
| Прилепин Н.Т., Голубев А.Н | |||
| Оптические квантовые генераторы в геодезических измерениях | |||
| Устройство для измерения расстояний | 1976 |
|
SU586701A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения расстояний | 1980 |
|
SU870919A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
