4
4
taaol.
Ю
объектив 3, которьй установлен от сканирующего многогранного зеркала блока 2 на расстоянии, равном его рабочему отрезку. Объектив 3 осуществляет ггреобразование развертки из угловой Р пикейную. Зеркало 4, установленное под углом 45° к оптической оси, осуществляет поворот светового потока на ЭО . Объект 6 должен быть располЬжен в точках пересечения прямого светового потока, при этом обеспечиваетгя измерение параметром об7,- екта по координате X, и светового потока, повернутого на 90 зеркалом 4, что обеспечивает измерение смещения и диаметра объекта 6 по координате У. Затем свет попадает на фокусирующую линзу 5, которая собирает его на фотоприемник 7. Последний вырабатывает информационные сигналы, попадающие на усилитель-формирователь 8. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения положения и контроля правильности геометрических форм длинномерных многогранных объектов | 1988 |
|
SU1585678A1 |
| Устройство для измерения положения объекта | 1983 |
|
SU1272109A1 |
| Устройство для измерения размеров элементов микроструктур | 1983 |
|
SU1128118A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАЗМЕРА И ПОЛОЖЕНИЯ ИЗДЕЛИЯ | 1988 |
|
SU1828239A1 |
| Устройство для бесконтактного измерения диаметров и перемещений изделий | 1987 |
|
SU1439402A1 |
| Устройство для измерения плоских углов | 1988 |
|
SU1567885A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1997 |
|
RU2133451C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО ИЗМЕРЕНИЯ УГЛОВЫХ ВЕЛИЧИН | 1995 |
|
RU2112208C1 |
| Устройство для бесконтактного измерения диаметра изделий | 1983 |
|
SU1116310A1 |
| Измеритель координат элементов объектов | 1990 |
|
SU1744446A1 |
Изобретение относится к контрольно-измерительной технике. Цель изобретения - повышение точности и информативности измерения за счет введения одноканальной оптической системы и измерения диаметра объекта по двум направлениям. Устройство дпя измерения положения и диаметра объекта содержит последовательно расположенные и оптически связанные лазер I, блок 2 сканирования, оптическую систему, состоящую из объектива 3, оборачивающего зеркала 4, установленного под углом 45° к оптической оси фокусирующей линзы 5, объект 6 измерения, фотоприемник 7, усилитель-фор-§ мирователь 8. Вышедший из лазера 1 пучок света попадает на блок 2 сканирования, излучение попадает на
Изобретение относится к контрольно-измерительной технике и может быть использовано для измерения нарз жного диаметра и контроля положения протяжных изделий при производстве Стекловолокна, проволоки, кабеля.
Целью изобретения является повышение точности и информативнос.ти измерения за счет введения однока- нальной оптической системы и измерения диаметра по двум направлениям.
На фиг. 1 представлена блок-схема предложенного устройства; на фиг.2 - .временные диаграммы информационных .импульсов; на фиг. 3 - временные диаграммы работы устройства.
Устройство содержит последовательно расположенные и оптически связанные лазер I, блок 2 сканирования, представляющий собой многогранное- зеркало, установленное с возможностью вращения.с заданной частотой, оптический блок, состоящий из объектива 3, оборачивающего зеркала 4, установленного под углом 45° к оптической оси и фокусирующей линзы 5, объектив 6 измерения и фотоприемник 7. К выходу фотоприемника 7 через усилитель- формирователь 8 подключены первая схема 9 задержки и блок 10 временной селекции, состоящий из инвертора 11, одновибратора 12, четырех В-тригге- ров 13-16, включенных по схеме деления на два, и четырех.трехвкодовых схем И 17-20. Счетный вход D-триггера 5, а также входы инвертора П, од- новибраторп 12, третьи входы-схем И 17 и 18, пход схемы 9 задержки под0
0
5
0
5
ключены к выходу усилителя-формирователя 8, счетный вход D-триггера 13 и первые входы схем И 19 и 20 подключены к выходу инвертора 11; вы/ход одновибратора 12 связан с R-входами всех D-триггеров, прямой выход D-триггера 13 соединен со счетным входом D-триггера 14, прямой выход D-триггера 15 подключен к счетному входу D-триггера 16 и к вторым входам схем, И 17, 18 и 19, а обратный - к третьему входу схемы И 20, прямой выход D- триггера 14 связан с первым входом схемы, И 18 и с вторым входом схемы. И 20, прямой выход D-триггера 16 подключен к первому входу схемы И 17 и к третьему входу схемы И 19, выходы схем И 17-20 подсоединены к первым входам схем 21 совпадения соответствующих измерительных каналов 22-25, каждый из которых состоит из последовательно соединенных схемы 21 сов- . падения, счетчика 26 и буферного регистра 27. К вторым входам схем 21 совпадения всех измерительных каналов 22-25 подключен генератор 28 тактовой частоты. Выход первой схемы 9 задержки связан непосредственно со счетным входом буферного регистра 27 всех измерительных каналов 22-25 и через вторую схему 29 задержки - с R-входом счетчика 26 также всех измерительных каналов 22-25.
Устройство работает следующим образом. .
Вьщгедший из лазера 1 пучок света попадает на блок 2 сканирования. Далее излучение попадает на объектив
3, который установлен от сканирующего многогранного зеркала блока 2 на расстоянии, равном его рабочему отрезку.
Объектив 3 осуществляет преобразование развертки из угловой в линейную. Зеркало 4, установленное под углом к оптической оси, осуществляет поворот светового потока на 90 . Объект 6 должен быть расположен в точках пересечения прямого светового потока, при этом обеспечивается измерение параметров объектов по коор динате X и светового потока, повернутого на 90° зеркалом 4, что обеспечивает измерение смещения и диаметра объекта 6 по координате У.
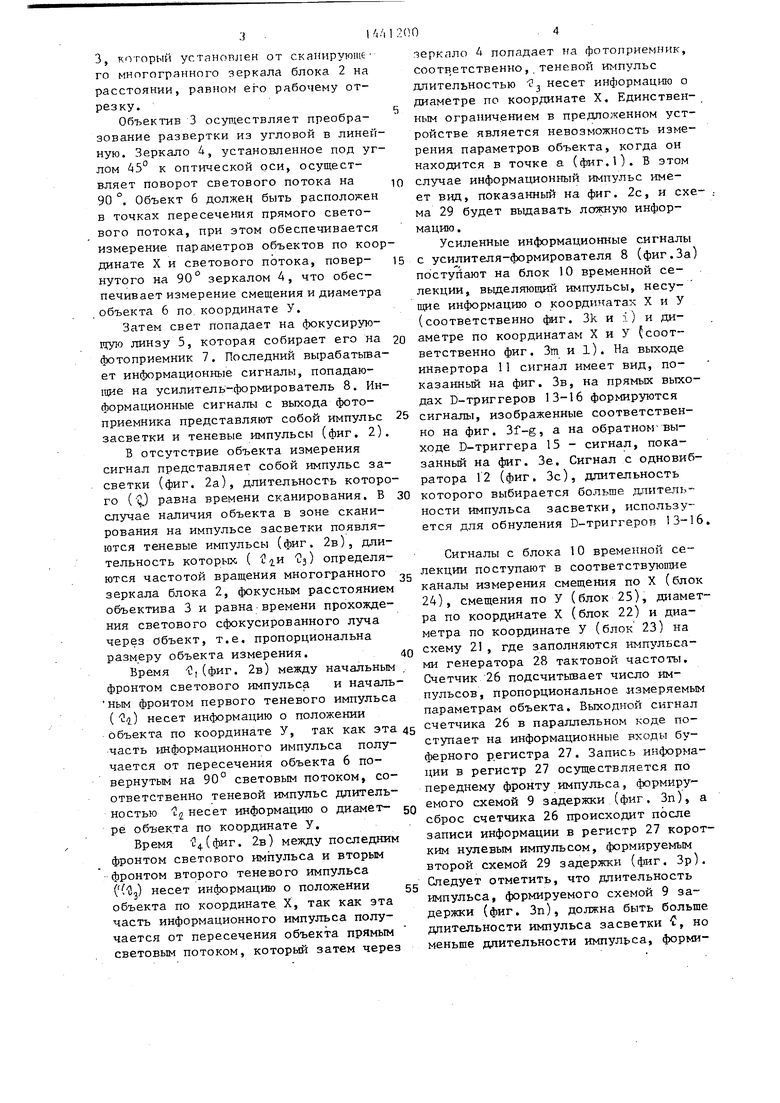
Затем свет попадает на фокусирующую линзу 5, которая собирает его на фотоприемник 7. Последний вырабатьгоа- ет информационные сигналы, попадающие на усилитель-формирователь 8. Информационные сигналы с выхода фотоприемника представляют собой импульс засветки и теневые импульсы (фиг, 2).
В отсутствие объекта измерения сигнал представляет собой импульс засветки (фиг. 2а), длительность которо го ( 1) равна времени сканирования. В случае наличия объекта в зоне сканирования на импульсе засветки появляются теневые импульсы (фиг. 2в), длительность которых ( 1Я ) определяются частотой вращения многогранного зеркала блока 2, фокусным расстоянием объектива 3 и равна времени прохождения светового сфокусированного луча через объект, т.е. пропорциональна размеру объекта измерения.
Время D,(фиг. 2в) между начальным фронтом светового импульса и началь ным фронтом первого теневого импульса ( 2/2.) несет информацию о положении объекта по координате У, так как эта часть информационного импульса получается от пересечения объекта 6 повернутым на 90° световым потоком, соответственно теневой импульс длительностью llj несет информацию о диаметре объекта по координате У,
Время (фиг. 2в) между последним фронтом светового импульса и вторым фронтом второго теневого импульса ((ij) несет информацию о положении объекта по координате X, так как эта часть информационного импульса получается от пересечения объекта прямым световым потоком, который затем через
зеркало 4 попадает на фотоприемник, соответственно, теневой импульс длительностью -С,, несет информацию о диаметре по координате X, Единственным ограничением в предложенном устройстве является невозможность измерения параметров объекта, когда он находится в точке а (фиг.О. В этом
0 случае информационный импульс имеет вид, показанный на фиг. 2с, и схема 29 будет выдавать ложную информацию .
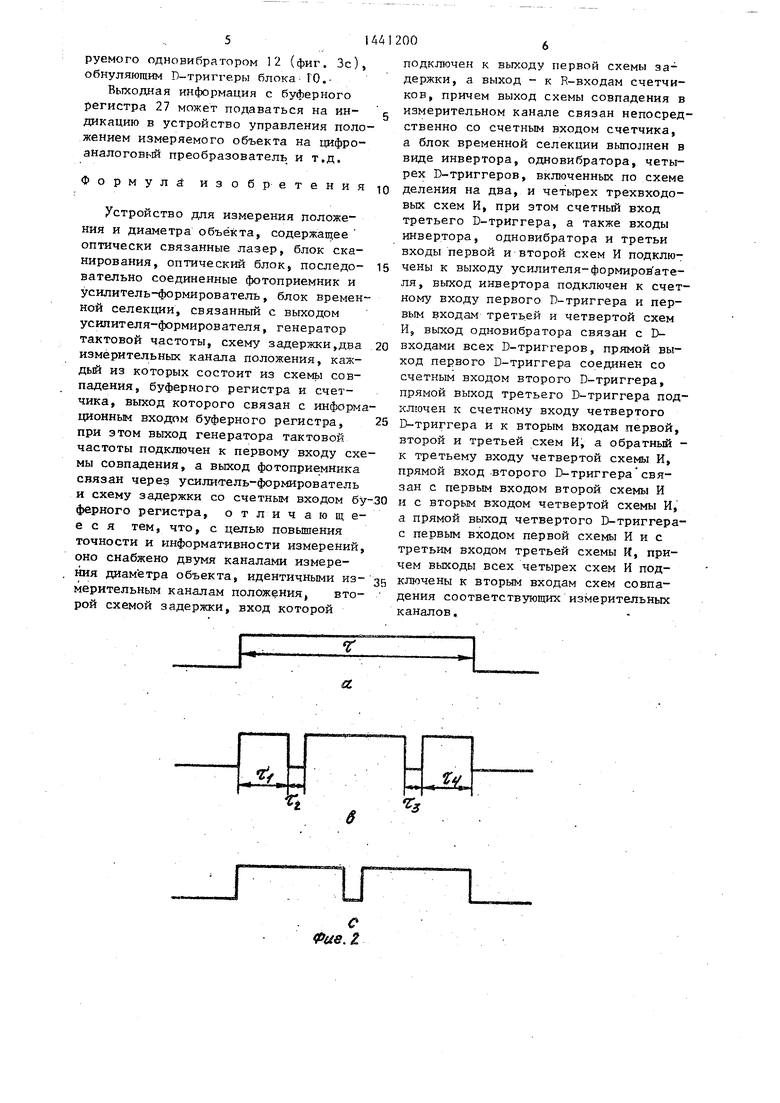
Усиленные информационные сигналы
5 с усилителя-формирователя 8 (фиг.За) поступают на блок 10 временной селекции, вьщеляющий импульсы, несу- щие информацию о координатах X и У (соответственно фиг. 3k и L) и ди0 аметре по координатам X и У (соответственно фиг. 3т и 1). На выходе инвертора 11 сигнал имеет вид, показанный на фиг. Зв, на прямых выходах D-триггеров 13-16 формируются
5 сигналы, изображенные соответственно на фиг. 3f-g, а на обратномвыходе D-триггера 15 - сигнал, показанный на фиг. Зе. Сигнал с одновибратора 12 (фиг. 3с), длительность
0 которого выбирается больше длительности импульса засветки, используется для обнуления D-триггероп 13-16,
Сигналы с блока 10 временной селекции поступают в соответствующие каналы измерения смещения по X (блок 24), смещения по У (блок 25), диаметра по координате X (блок 22) и диаметра по координате У (блок 23) на
Q схему 21, где заполняются импульсами генератора 28 тактовой частоты. Счетчик 26 подсчитьшает число импульсов , пропорциональное измеряемым параметрам объекта. Выходной сигнал
с счетчика 26 в параллельном коде поступает на информационные входы буферного р.егистра 27. Запись информации в регистр 27 осуществляется по переднему фронту импульса, формируQ емого схемой 9 задержки (фиг. Зп), а сброс счетчика 26 происходит после записи информации в регистр 27 коротким нулевым импульсом, формируемым второй схемой 29 задержки (фиг. Зр).
g Следует отметить, что дпительность импульса, формируемого схемой 9 задержки (фиг, Зп), должна быть больше длительности импульса засветки С, но меньше длительности импульса, формируемого одновибратором 12 (фиг. 3с), обнуляющим D-триггеры блока ГО.Выходная информация с буферного регистра 27 может подаваться на ий- дикацию в устройство управления положением измеряемого объекта на цифро- аналоговый преобразователь и т.д.
Формула изобретения
стройство для измерения положения и диаметра объекта, содержащее оптически связанные лазер, блок сканирования, оптический блок, последо- вательно соединенные фотоприемник и усилитель-формирователь, блок временной селекции, связанный с выходом усилителя-формирователя, генератор тактовой частоты, схему задержки,два измерительных канала положения, каж- дьй из которых состоит из схемь совпадения, буферного регистра и счетчика, выход которого связан с ршформа ционным входом буферного регистра, при этом выход генератора тактовой частоты подключен к первому входу схемы совпадения, а выход фотоприемника связан через усилитель-формирователь и схему задержки со счетным входом бу ферного регистра, отличающееся тем, что, с целью повышения точности и информативности измерений оно снабжено двумя каналами измерения диаметра объекта, идентичными из- 35 ключены к вторым входам схем совпа- мерительным каналам положения, второй схемой задержки, вход которой
дения соответствующих измерительных каналов,
г. .
с
Фие. Z
но дключен к выходу первой схемы задержки, а выход - к R-входам счетчиков, причем выход схемы совпадения в измерительном канале связан непосредственно со счетным входом счетчика, а блок временной селекции выполнен в виде инвертора, одновибратора, четырех D-триггеров, включенных по схеме деления на два, и четьфех трехвходо- вых схем И, при зтом счетный вход третьего D-триггера, а также входы инвертора, одновибратора и третьи входы первой и второй схем И подключены к выходу усилителя-формиров ате- ля, выход инвертора подключен к счетному входу первого D-триггера и первым входам третьей и четвертой схем И, выход одновибратора связан с D- входами всех D-триггеров, прямой выход первого D-триггера соединен со счетным входом второго D-триггера, прямой выход третьего D-триггера подключен к счетному входу четвертого D-триггера и к вторым входам первой, второй и третьей схем И, а обратный - к третьему входу четвертой схемы И, прямой вход второго D-триггера связан с первым входом второй схемы И и с вторым входом четвертой схемы И, а прямой выход четвертого D-триггера- с первым входом первой схемы И и с третьим входом третьей схемы И, причем выходы всех четырех схем И подключены к вторым входам схем совпа-
дения соответствующих измерительных каналов,
Фиг.з
| Устройство для измерения положения объекта | 1983 |
|
SU1272109A1 |
