Изобретение относится к системам автоматического комбинированного управления рулевыми, тормозными и другими устройствами транспортных средств, а также для широкого круга других устройств, где необходимо совмещенное управление одновременно поворотным и осевым перемещением.
Известны системы управления одновременно двумя объектами, которые имеют самостоятельные каналы для управления двумя двигателями- независимым поршневым исполнительным механизмом, осуществляющим осевое перемещение и поворотным исполнительным двигателем, осуществляющим вращение.
Наличие двух систем управления и двух независимых исполнительных механизмов при необходимости управления объектами по двум независимым координатам приводит к значительной сложности конструкции, а также к значительным габаритам и массам при ограниченных функциях: обеспечиваются либо только осевые, либо только поворотные движения исполнительных органов.
Известен и выбран за прототип гидравлический следящий двигатель, который обеспечивает перемещение исполнительного вала по двум независимым координатам. Он содержит электродинамический преобразователь, управляемый каналом управления, двигатель осевого и вращательного перемещения, включающий золотник и поршень-ротор, объект управления, электродинамический преобразователь выполнен в виде управляемого двумя взаимосвязанными электродинамическими системами - поворотного и осевого перемещения - выходного вала, жестко связанного с гильзой золотника, которая размещена в отверстии поршня и выполнена с глухими осевыми каналами, разделенными перегородкой и радиальными окнами, сообщающими гидролинии нагнетания и слива с рабочими полостями поршня-ротора, который содержит указанный поршень и ротор, размещенный в кольцевой полости корпуса, при этом ротор и поршень установлены с возможностью поворота и осевого перемещения исполнительного вала.
Известный двигатель имеет возможность только неполных поворотных движений исполнительного вала, поскольку его ротор размещен в кольцевой полости корпуса и выполнен в виде подвижных и неподвижных лопастей. Кроме этого, в устройстве не предусмотрены средства, обеспечивающие равномерную передачу крутящего момента, Это ограничивает функциональные возможности устройства и, в случае необходимости получения сложного перемещения исполнительного вала, приводит к необходимости использования двух независимых систем управления с самостоятельными
двигателями, что неоправдано дорого и сложно.
Цель изобретения - расширение функциональных возможностей при одновременном обеспечении равномерности
0 передачи крутящего момента, исключение холостых ходов и упрощение устройства.
Поставленная цель достигается тем, что кольцевая полость корпуса ротора дополнена Гц равномерно расположенными по ок5 ружности сегментообразными полостями, размещенный в этой полости ротор выполнен в виде цельного кольца и имеет два П2 каналов сообщения с гидролиниями нагнетания и слива и па симметрично располо0 женных по окружности радиальных каналов для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом т не менее чем на единицу больше
5 П2, но не более чем на 3, золотник размещен во втулке с радиальными окнами, при этом золотники втулка имеют осевые щели, сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора, пор0 шень связан с кольцевым ротором шлице- вым соединением со скользящей посадкой, шлицы которого расположены по осям симметрии пластин ротора, в теле ротора выполнены каналы, в которых установлены
5 обратные клапаны для прижима пластин к сегментообразному профилю корпуса.
Сущность предложенного технического решения состоит в том, что в этой конструкции обеспечивается полноповоротное вра0 щение и осевое перемещение исполнительногр вала, что дает возможность управления по двум незавимым коор- динатам с отслеживанием движения исполнительного вала.
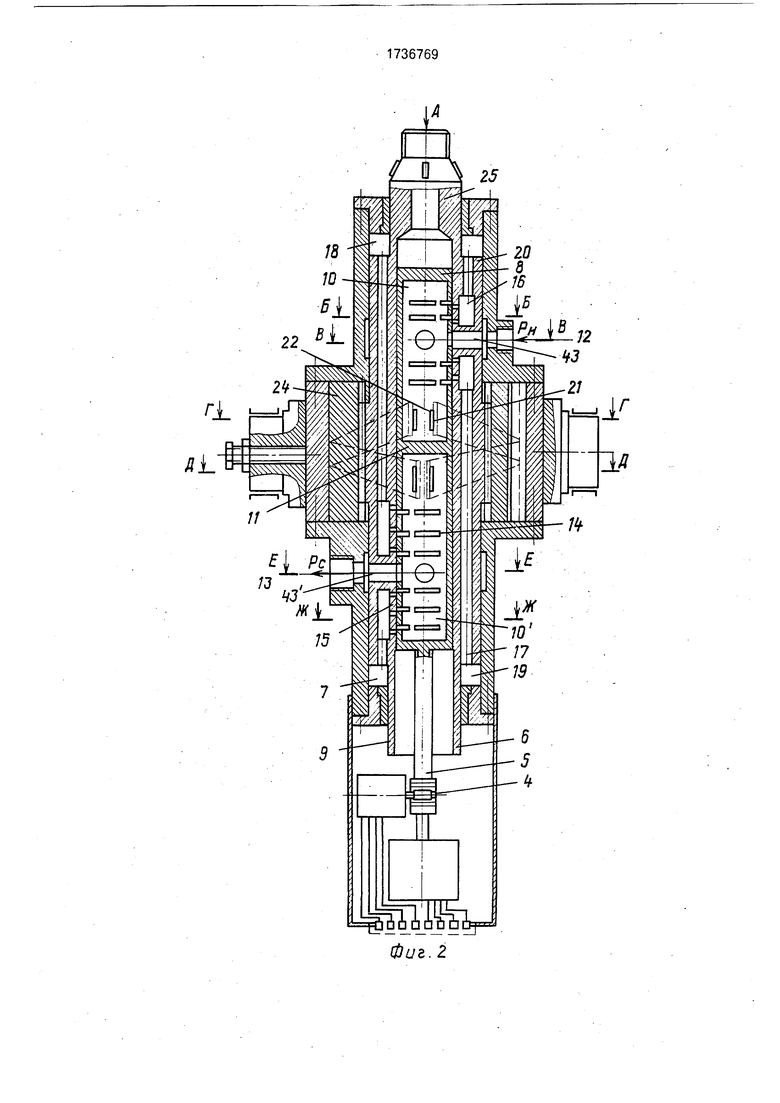
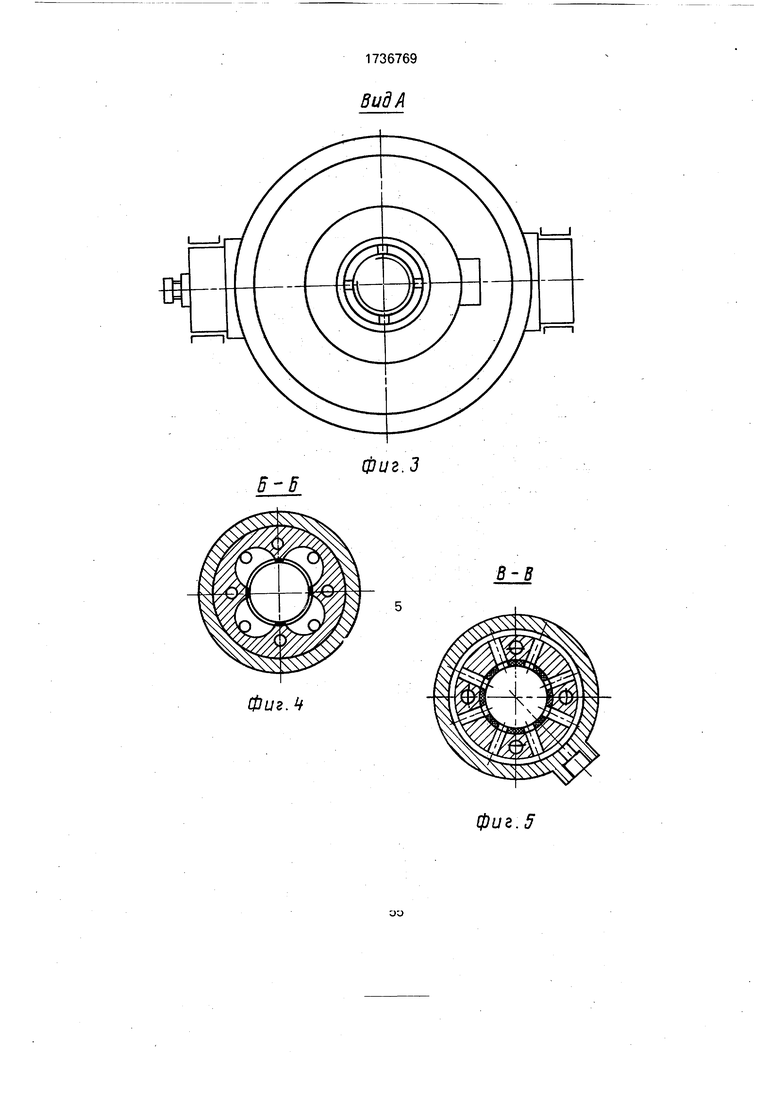
5 На фиг. 1 представлена блок-схема канала управления; на фиг. 2 - конструктивная схема гидравлического следящего двигателя, обеспечивающего управление по двум независимым координатам; на фиг. 3 0 А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 2; на фиг. 6 - разрез Г-Г на фиг. 2; на фиг. 7 - узел I на фиг. 6; на фиг. 8 - разрез Д-Д на фиг. 2; на фиг. 9 - разрез Е-Е на фиг. 2; на фиг.
5 10 - разрез Ж-Ж на фиг. 2.
Канал управления содержит (фиг. 1) задающие элементы 1,1, которые предназначены для задания программы управления объектом, Программа сформирована в виде электрического сигнала. На выходе задающих элементов 1,1 установлены делители 2, 2 входного сигнала, предназначенные для разделения сигнала с задающих элементов 1,1 на разные части; одна половина сигнала с делителей 2, 2 поступает в цепь обратной связи, а другая - на вход электронных усилителей 3, 3 сигнала.
Выход электронных усилителей 3, 3 сигнала подключен к входу функционально- гр электродинамического преобразователя 4, предназначенного для преобразования электрических сигналов с электронных усилителей 3, 3 в совмещенные механические перемещения (по двум независимым координатам). Как следует из фиг. 2, вал 5 элект- родинамического преобразователя 4 жестко связан с золотником 6 двигателя 7 осевого и вращательного перемещений. Золотник 6 двигателя 7 выполнен в виде гильзы 8, осуществляющей жесткую связь золотника 6 с валом 5 электродинамического преобразователя 4. Гильза 8 золотника 6 размещена во втулке 9. Гильза 8 золотника 6 выполнена с глухими осевыми каналами 10, 10 , разделенными перегородками 11. Глухие соевые каналы 10, 10 служат для обеспечения через них с гидролиниями нагнетания t2 и слива 13 и регулирования подачи рабочей среды. Для этих целей в гильзе 8 золотника 6 выполнены несколько радиальных окон 14, регулирующих совместно с радиальными окнами 15 втулки 9 подачу рабочей среды через каналы 16, 17 в подпоршневые полости 18, 19 поршня 20.
Кроме того, в гильзе 8 золотника 6 вы- полнены осевые щели 21, а во втулке 9 золотника 6 - осевые щели 22, регулирующие подачу рабочей среды от гидролиний нагнетания 12 и слива 13 в радиальные каналы 23 поршня-ротора 24. Поршень-ротор 24 дви- гателя 7 имеет исполнительный вал 25, кинематически связанный с объектами управления 26, 27 (фиг. 1) и собственно совершающий осевые и вращательные полноповоротные перемещения - вращательное перемещение передается объекту управления 26, а осевое перемещение передается объекту управления 27. Осевое перемещение создается собственно поршнем 20, а вращательное - ротором 28.
Ротор 28 поршня-ротора 24 двигателя 7 выполнен в виде цельного кольца и размещен в кольцевой полости 29 корпуса 30(фиг. 3). Кольцевая полость 29 соответствует параметрам кольцевого ротора 28, но допол- нена п равномерно расположенными по внешней окружности кольцевой полости 29 корпуса 30 выемками - сегментообразными полостями 31 (фиг. 3). В теле ротора 28 выполнены каналы 32, 33 (всего 2п каналов),
сообщающиеся с гидролинией нагнетания
12и имеющие возможность реверса. При этом за каналами 32 и 33 имеются каналы 32, 33 сообщающие с гидролинией слива
13соответственно свой сливной канал при реверсе.
Кроме этого, в теле ротора 28 выполнены п | радиальных направляющих пазов 34 для перемещения внутри них п подвижных в радиальном направлении пластин 35, взаимодействующих своими торцами с сегмен- тообразным профилем 36 корпуса 30. Пластины 35 симметрично расположены по окружности (фиг. 3). Для равномерности передачи крутящего момента и исключения холостых ходов экспериментально установлено, что необходимо выдержать, чтобы гп было не менее чем на единицу более П2, где ni - число сегментообразных полостей, П2 число пластин.
Сегментообразный профиль 36 отверстия в корпусе 30 образован кривыми сегментов сегметообразных полостей 31 и соединяющими их перемычками 37 - отрезками наружной окружности кольцевой полости 29 между сегментообразными полостями 31 (фиг. 3). Каналы 38, 39 служат для подачи в них рабочей среды и прижима торцов пластин 35 к сегментообразному профилю 36 корпуса 30.
В каналах 38, 39 установлены обратные клапаны 40, 41, которые задают режим прижима и величину давления на пластины 35 в радиальных пазах 34 (фиг. 3). Поршень 20 связан с кольцевым ротором 28 шлицевым соединением 42 со скользящей посадкой для передачи исполнительному валу 25 одновременно осевого и вращательного перемещений. В теле поршня 20 выполнены радиальные каналы 43,43 для подачи рабочей среды из гидролиний нагнетания 12 и на слив 13. В устройстве (фиг. 1) предусмотрены блок питания 44, обеспечивающий сообщение рабочих полостей гидравлического двигателя 7 с гидролиниями нагнетания 12 и слива 13.
Исполнительный вал 25 гидравлического двигателя 7 связан с объектами управления 26, 27 через кинематические передачи 45,46. Блок обратной связи 47 представляет собой электронное устройство с датчиками обратной связи, выход которого подключен к входу блока сравнения 49, предназначенного для сравнения заданного сигнала с делителей 2, I1 входного сигнала и сигналов обратной связи.
Выходы блока сравнения 49 подключены к входам сумматоров 50,50, второй вход которых подключен к выходу делителей 2,2 заданного сигнала.
На фиг. 1 показаны сумматоры 51, 51 жесткой единичной обратной связи по положению, имеющейся в гидравлическом двигателе 7 между золотником 6 и ротором 28.
Устройство работает следующим обра- зом.
С задающих элементов 1,1 (фиг. 1) заданный сигнал поступает в делитель 2, 2 входного сигнала, где он делится пополам и усиливается. Одна половина сигнала посту- пает на сумматоры 50, 50, а другая - в цепь обратной связи на вход блока сравнения 49 (фиг. 1). С выходов блока сравнения 49 сиг; нал поступает на входы сумматоров 50, 50 , где суммируется с заданным сигналом и усиливается на электронных усилителях 3,3 . С выхода электронных усилителей 3, 3 сигналы поступают на вход функционального электрического преобразователя 4, который выполнен в виде выходного вала 5 со слож- ным осевращательным движением, который управляется двумя связанными электромагнитными (электродинамическими) системами, одна из которых создает осевое перемещение выходному валу 5, а другая сообщает ему (выходному валу 5) вращательное перемещение (фиг. 2).
Выходной вал 5 жестко связан с гильзой 8 золотника 6, которая то же совершает вместе с валом 5 осевые и поворотные переме- щения (фиг. 2).
В этом случае рабочая среда поступает из гидролинии нагнетания 12 через радиальные каналы 43 поршня 20 в глухой осевой канал 10 гильзы 3 золотника, канал 1 в рабочую полость 18 поршня 20 (фиг. 2 - 4). Одновременно в момент перемещения золотника вниз по чертежу открываются радиальные окна 14 слива и рабочая жидкость из полости 19 поршня 20 поступает в глухой осевой канал 10 гильзы 8 и далее по радиальным каналам 43 в гидролинию слива 13 (фиг. 2-4). При этом поршень 20 перемещается вниз. Аналогично происходит открывание каналов при перемещении золотника вверх. При этом осевое положение поршня 20 пропорционально входному сигналу. Это достигается тем, что в этом положении гильзы 8 золотника 6 относительно втулки 9 радиальные окна 15 втулки 9 золотника 6 перекрыты радиальными окнами 14 гильзы 8 золотника 6 и эта величина перекрытия пропорциональна перемещению гильзы 8, т. е. входному сигналу. Следовательно, расход рабочей среды, подводимой в рабочие полости 18,19 поршня 20,таков, что положение поршня 20 отслеживает положение гильзы 8 (фиг. 2).
Поршень 20 перемещается до тех пор, пока радиальные окна 15 гильзы 8 золотника 6 не перекроются втулкой 9 относительно гидролинии нагнетания 12.
При осевом перемещении поршня 20 элементы шлицевого соединения 4 скользят по внутренним шлицам ротора 28. При вращательном движении ротора 28 поршень 20 поворачивается одновременно с ним, так как связан шлицевым соединением 42. Таким образом, исполнительный вал 25 может производить сложные полноповоротные и осевые перемещения.
Это происходит следующим образом. Рабочая среда из глухого соевого канала 10 гильзы 8 золотника 6, который в это время сообщен с гидролинией нагнетания 12 через радиальные отверстия 43, осевые щели 21 и 22 соответственно гильзы 8 и втулки 9 золотника, радиальные каналы 23 поршня- ротора 24 и каналы 32 и 33 поступает в сегментообразные полости 31, при этом одна половина сегментообразной полости 31, которая разделена пластиной 35 на две час- ти,сообщена с гидролинией нагнетания 12, а другая - с гидролинией слива 13.
Под действием разности давления, оказываемого на пластину 35 с двух сторон и за счет неравенства давлений, оказываемых на пластину 35, поршень 24 под действием крутящего момента начинает поворачиваться. При этом поворот поршня-ротора 24 отслеживает поворотные положения гильзы 8 золотника 6 за счет перекрытия осевых щелей 21, 22 соответственно гильзы 8 и втулки 9 золотника 6.
Прижим пластин 35 к сегментообразно- му профилю 36 осуществляется через сообщенные с гидролинией нагнетания 12 и слива 13 каналы 38, 39, в них установлены обратные клапаны 40, 41, которые пропускают рабочую среду из гидролинии нагнетания и запирают гидролинию слива 13. При этом за счет обратных клапанов 40, 41 в радиальном канале 34 устанавливается давление, необходимое для прижима пластин 35 к сегментообразному профилю 36. Шлицы шлицевого соединения 42 расположены между пластинами 35 и равноудалены от них, чем обеспечивается равномерная передача крутящего момента на исполнительный вал 25, который одновременно совершает осевое перемещение. Для тех же целей - равномерности передачи крутящего момента - необходимо, чтобы взаимно противоположные пластины 35 находились в процессе работы в противофазе или равномерно и взаимно противоположно перемещались друг по отношению к другу, исключая при этом холостые ходы. Установлено экспериментом, что это может быть достигнуто тем, тр сегментообразные полости (т полостей)
расположены равномерно по окружности, а радиальные пазы с пластинами (их П2), симметрично расположены по окружности, при этом п не менее чем на единицу больше П2, но не более чем на 3, а также равномерным размещением по окружности элементов шлицевого соединения 42.
Положительный эффект предлагаемого устройства заключается в обеспечении полноповоротных вращений с одновременным осевым перемещением исполнительного вала, что исключает необходимость установки двух следящих двигателей. Кроме этого, в устройстве передача полноповоротного вращения осуществляется при равномерной передаче крутящего момента, что достигается равномерным размещением шлицёвых соединений между, каждой парой пластин, а также равномерным расположением пластин по окружности и симметричным расположением сегментообразных полостей.
Еще одно преимущество устройства состоит в том, что в конструкции обеспечивается слежение исполнительного вала за входным сигналом как при его вращении, так и при его осевом перемещении.
Формула изобретения Система совмещённого управления приводами по двум независимым координатам, содержащая последовательно соединенные задающие элементы, делитель входного сигнала, сумматор, электронный усилитель, электродинамический преобразователь, двигатель осевого и вращательного перемещений, включающий золотник, и поршень-ротор, объект управления, блок обратной связи с электронным усилителем, блок сравнения, выходы которого подключены к входам сумматоров, при этом электродинамический преобразователь выполнен в виде управляемого двумя взаимосвязанными электродинамическими системами поворотного и осевого перемещения выходного вала, жестко связанного с гильзой золотника, которая выполнена с глухими осевыми каналами, разделенными
перегородкой, и размещена в отверстии поршня, при этом гильза золотника выполнена с радиальными окнами, сообщающими гидролинии нагнетания и слива с рабочими полостями поршня-ротора, который содержит указанный поршень и ротор, размещен- ный-в кольцевой полости корпуса, при этом ротор и поршень установлены с возможностью поворота и осевого перемещения исполнительного вала, отличающаяся
тем, что, с целью расширения функциональных возможностей при одновременном обеспечении равномерности передачи крутящего момента, исключения холостых ходов, упрощения устройства, кольцевая
полость корпуса ротора выполнена с ni равномерно расположенными по окружности сегментообразными полостями, размещенный в упомянутой полости ротор выполнен в виде цельного кольца и снабжен двумя П2
каналами сообщения с гидролиниями нагнетания и слива и П2 симметрично располо- женными по окружности радиальными пазами для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом щ не менее чем на единицу больше П2, но не более чем на 3, золотник размещен во втулке с радиальными окнами, при этом золотник и втулка имеют
осевые щели;-сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора, поршень связан с кольцевым ротором шлицевым соединением со скользящей посадкой, шлицы которого расположены на осях симметрии пластин ротора, в теле ротора выполнены каналы, в которых установлены обратные клапаны для прижима пластин к сегментообразному профилю корпуса поршня-ротора.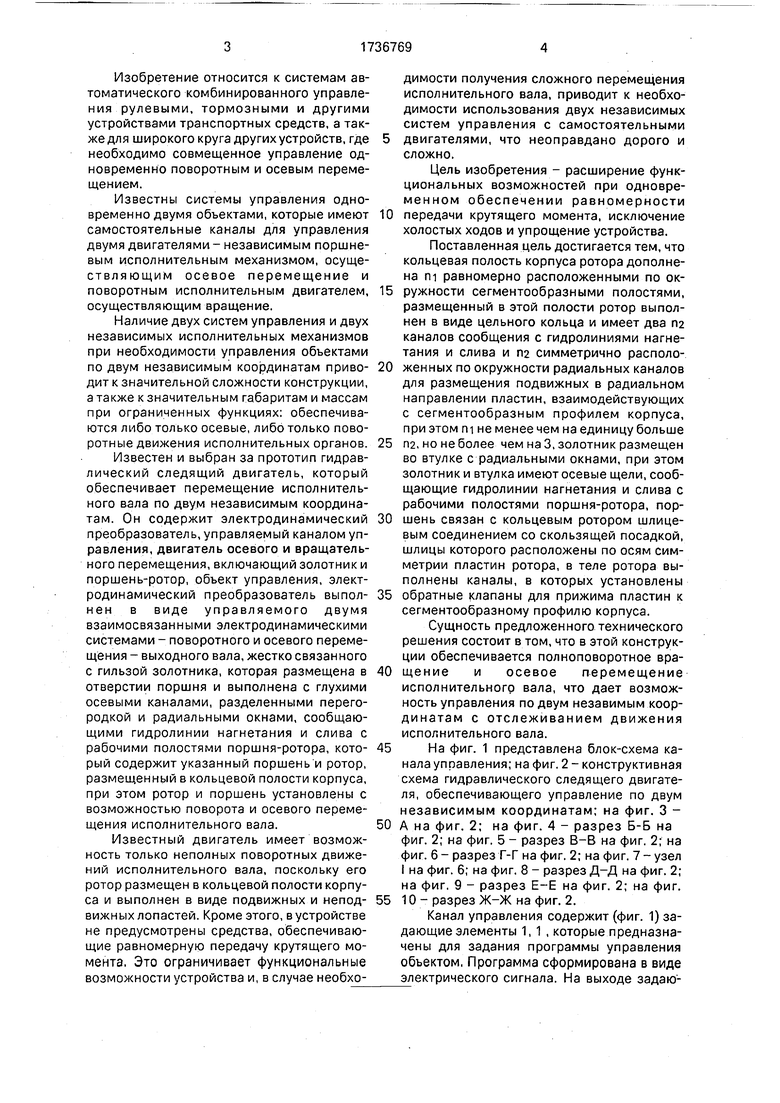

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СОВМЕЩЕННОГО УПРАВЛЕНИЯ ПРИВОДАМИ ПО ДВУМ НЕЗАВИСИМЫМ КООРДИНАТАМ | 1992 |
|
RU2033344C1 |
| Система управления рулевыми органами летательного аппарата | 1990 |
|
SU1744001A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| Стенд для испытания рулевого управления транспортного средства | 1984 |
|
SU1163188A1 |
| ШАГОВЫЙ ГИДРОПРИВОД С ОБЪЕМНЫМ ДОЗИРОВАНИЕМ | 2018 |
|
RU2680633C1 |
| Устройство для управления реверсивным исполнительным механизмом | 1982 |
|
SU1084444A1 |
| ШАГОВЫЙ ПРИВОД С ОБЪЕМНЫМ ДОЗИРОВАНИЕМ | 2006 |
|
RU2347953C2 |
| ОГРАНИЧИТЕЛЬ МОЩНОСТИ ЭЛЕКТРОГИДРАВЛИЧЕСКОГО СЛЕДЯЩЕГО ПРИВОДА | 2006 |
|
RU2309302C1 |
| ГИДРОСТАТИЧЕСКИЙ РУЛЕВОЙ МЕХАНИЗМ | 2000 |
|
RU2184670C1 |
| ГИДРОПРИВОД | 2018 |
|
RU2724422C2 |


Изобретение относится к системам автоматического комбинированного управления рулевыми, тормозными и другими устройствами транспортных средств, а также для широкого круга других устройств, где необходимо совмещенное управление одновременно поворотным и осевым перемещениями. Цель изобретения - расширение функциональных возможностей при одновременном обеспечении равномерности передачи крутящего момента, исключение холостых ходов и упрощение системы. КольJJ 32 2 е е е е г-г цевая полость 29 корпуса 30 ротора дополнена ni равномерно расположенными по окружности сегментообразными полостями 31. Размещенный в этой полости ротор 28 выполнен в виде цельного кольца и имеет два П2 каналов сообщения с гидролиниями нагнетания и слива и па симметрично расположенных по окружности радиальных каналов для размещения подвижных в радиальном направлении пластин, взаимодействующих с сегментообразным профилем корпуса, при этом m не менее чем на единицу больше П2, но не более чем на три. Золотник размещен во втулке с радиальными окнами, при этом золотник и втулка имеют осевые щели, сообщающие гидролинии нагнетания и слива с рабочими полостями поршня-ротора. Поршень связан с кольцевым ротором 28 шлицевым соединением со скользящей посадкой, шлицы которого расположены по осям симметрии пластин ротора. В теле ротора выполнены каналы, в которых установлены обратные клапаны для прижима пластин к сегментообразному профилю корпуса. 10 ил. 23 3S (Л с VJ CJ Os XI Qs ю фиг В
6919Ш
5-5
Фиг.Ц
фиг.З
В-В
фиг.5
д-д
Фиг.З
37
| 0 |
|
SU156026A1 | |
| Судно | 1925 |
|
SU1961A1 |
