Изобретение относится к электротехнике и радиотехнике и предназначено для преобразования частоты переменного электрического напряжения.
Известен способ безрезонансного формирования низкогармонического переменного электрического напряжения, т.е. напряжения, состоящего из низких гармоник преобразуемого синусоидального элек- трического сигнала, с помощью нелинейных (сегнетоэлектрических) конденсаторов,диэлектрическая поляризация которых нелинейно зависит от приложенного электрического напряжения, что приводит к появлению в токе через конденсатор низких гармоник. При этом в зависимости от того, приложено ли к сегнетоэлектрическим конденсаторам постоянное смещающее электрическое поле или нет, получаются только нечетные (преимущественно, третья) или одновременно четные (преимущественно, вторая) и нечетные гармоники.
Недостатком этого способа является низкая эффективность, вызванная малой амплитудой формируемых гармоник, т.е. малая величина отношения получаемой на выходе гармоники напряжения к переменному напряжению, подаваемому на вход. Недостатком же является преобладание в токе через конденсатор тока с основной частотой.
Наиболее близким к предлагаемому является способ формирования низкогармонического переменного электрического напряжения, при котором воздействуют входным электрическим сигналом и постоянным смещающим электрическим напряжением на линейные и нелинейные элементы преобразователя, производят компенсацию сигнала по основной частоте на линейный и нелинейных элементах (конденсаторах) в мостиковой схеме и снимают его с выхода преобразователя. При этом приложение постоянного смещающего на- пряжения к нелинейному конденсатору позволяет получить и нечетные, и четные гармоники.
Недостатком способа является низкая эффективность, вызванная малой амплиту- дои выходного сигнала.
Целью изобретения является повышение эффективности за счет увеличения амплитуды выходного сигнала.
В предлагаемом способе безрезонанс- ного формирования низкогармонического переменного электрического напряжения воздействуют входным электрическим сигналом и постоянным смещающим электрическим напряжением на линейные и нелинейные элементы преобразователя и производят компенсацию сигнала по основной частоте на линейных и нелинейных элементах. Новым является то, что компенсацию сигнала по основной частоте осуществляют путем его преобразования в механическую деформацию разных знаков жестко связанных между собой пьезоэлектрического и электрострикцион- ного элементов и передают их разностную деформацию на дополнительный пьезоэлектрический линейный элемент, с которого снимают выходной сигнал.
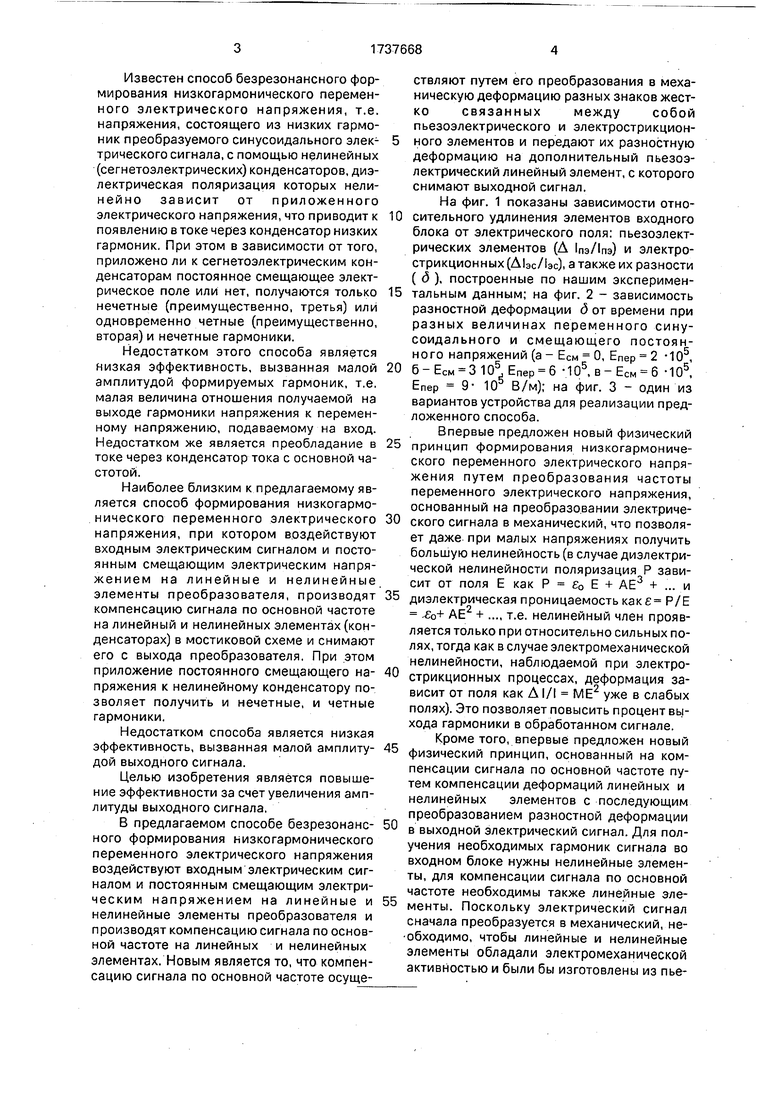
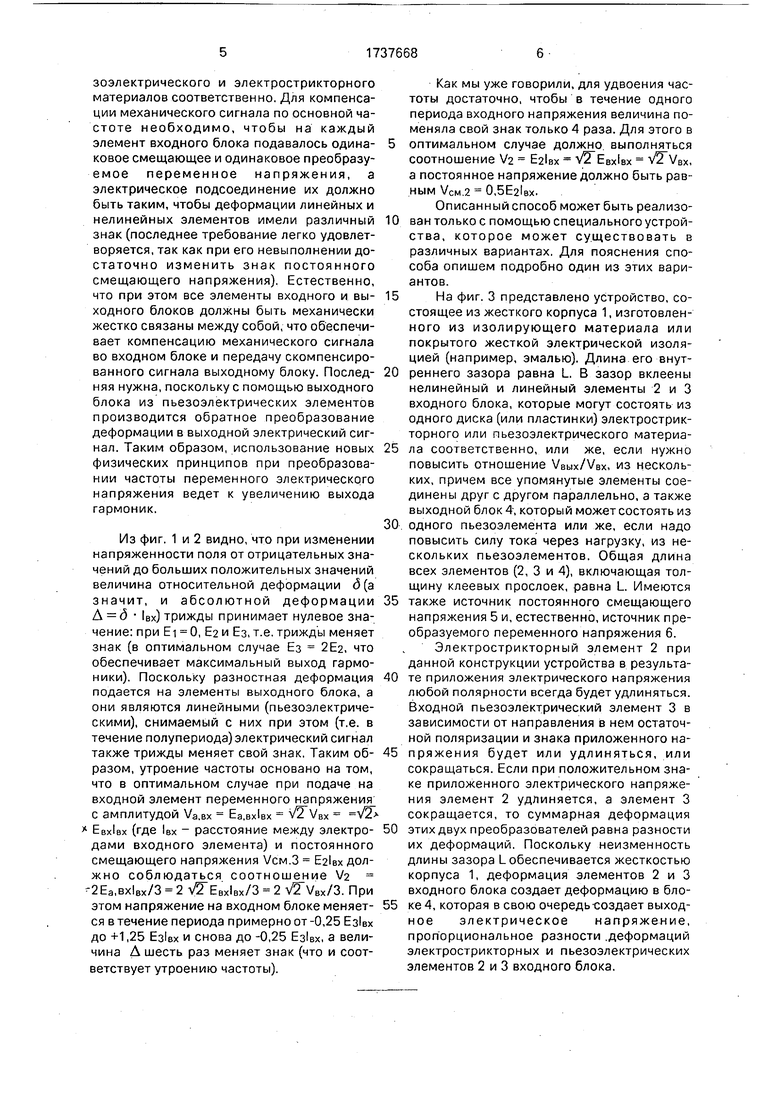
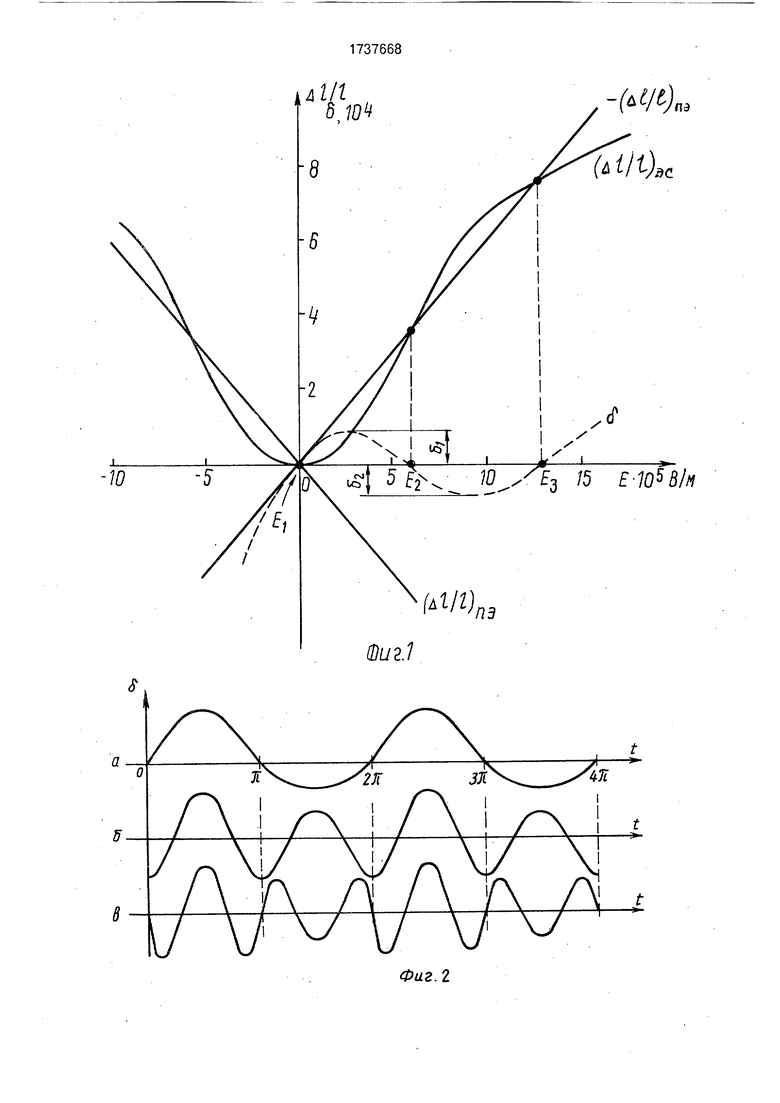
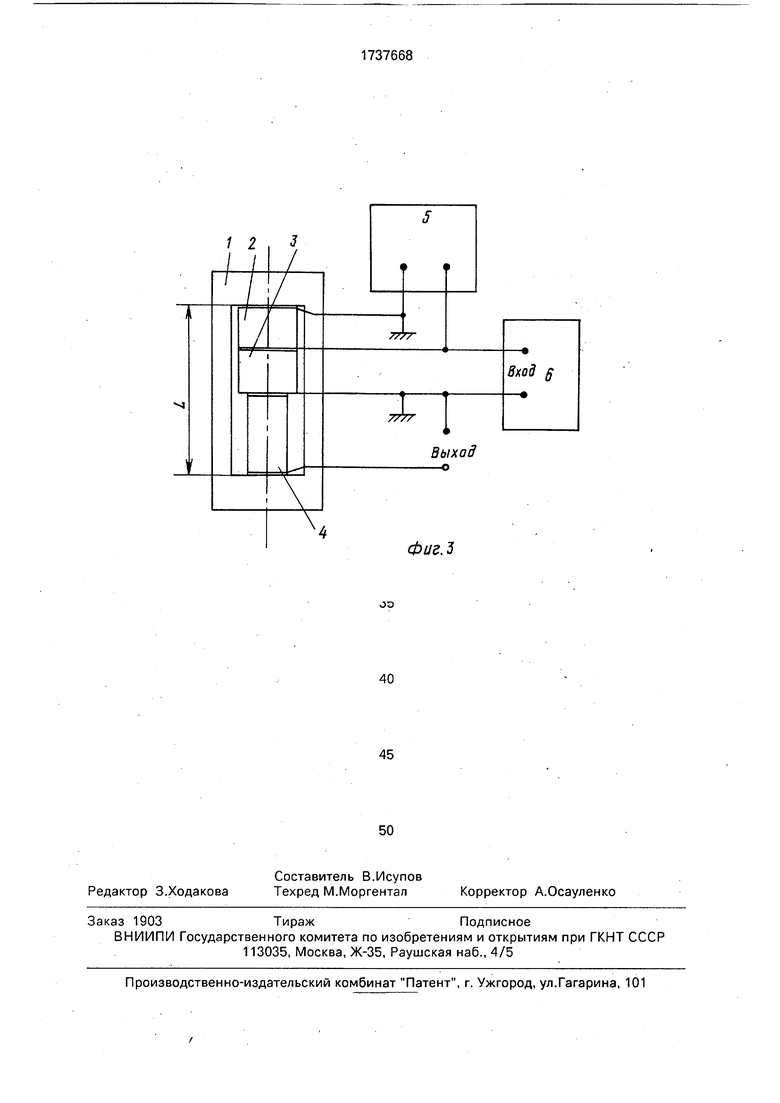
На фиг. 1 показаны зависимости относительного удлинения элементов входного блока от электрического поля: пьезоэлектрических элементов (А ) и электро- стрикционных (А Эс/1эс), а также их разности ( д ), построенные по нашим экспериментальным данным; на фиг. 2 - зависимость разностной деформации д от времени при разных величинах переменного синусоидального и смещающего постоянного напряжений (а - ЕСм 0, Епер 2 -105, б-Есм 3105, ЕПер 6 -105, в-Есм 6 -Ю5, Епер 9- 10 В/м); на фиг. 3 - один из вариантов устройства для реализации предложенного способа.
Впервые предложен новый физический принцип формирования низкогармонического переменного электрического напряжения путем преобразования частоты переменного электрического напряжения, основанный на преобразовании электрического сигнала в механический, что позволяет даже при малых напряжениях получить большую нелинейность (в случае диэлектрической нелинейности поляризация Р зависит от поля Е как Р Ј0 Е + АЕ3 + ... и диэлектрическая проницаемость как е Р/Е -Ј0+ АЕ2 + ..., т.е. нелинейный член проявляется только при относительно сильных полях, тогда как в случае электромеханической нелинейности, наблюдаемой при электро- стрикционных процессах, деформация зависит от поля как A I/I ME2 уже в слабых полях). Это позволяет повысить процент выхода гармоники в обработанном сигнале.
Кроме того, впервые предложен новый физический принцип, основанный на компенсации сигнала по основной частоте путем компенсации деформаций линейных и нелинейных элементов с последующим преобразованием разностной деформации в выходной электрический сигнал. Для получения необходимых гармоник сигнала во входном блоке нужны нелинейные элементы, для компенсации сигнала по основной частоте необходимы также линейные элементы. Поскольку электрический сигнал сначала преобразуется в механический, не- обходимо, чтобы линейные и нелинейные элементы обладали электромеханической активностью и были бы изготовлены из пьезоэлектрического и электрострикторного материалов соответственно. Для компенсации механического сигнала по основной частоте необходимо, чтобы на каждый элемент входного блока подавалось одина- 5 ковое смещающее и одинаковое преобразуемое переменное напряжения, а электрическое подсоединение их должно быть таким, чтобы деформации линейных и нелинейных элементов имели различный 10 знак (последнее требование легко удовлетворяется, так как при его невыполнении достаточно изменить знак постоянного смещающего напряжения). Естественно, что при этом все элементы входного и вы- 15 ходного блоков должны быть механически жестко связаны между собой, что обеспечивает компенсацию механического сигнала во входном блоке и передачу скомпенсированного сигнала выходному блоку. Послед- 20 няя нужна, поскольку с помощью выходного блока из пьезоэлектрических элементов производится обратное преобразование деформации в выходной электрический сигнал. Таким образом, использование новых 25 физических принципов при преобразовании частоты переменного электрического напряжения ведет к увеличению выхода гармоник.
30
Из фиг. 1 и 2 видно, что при изменении напряженности поля от отрицательных значений до больших положительных значений величина относительной деформации 6 (а значит, и абсолютной деформации 35 А 5 IBX) трижды принимает нулевое значение: при EI О, Е2 и Ез, т.е трижды меняет знак (в оптимальном случае ЕЗ 2Е2, что обеспечивает максимальный выход гармоники). Поскольку разностная деформация 40 подается на элементы выходного блока, а они являются линейными (пьезоэлектрическими), снимаемый с них при этом (т.е. в течение полупериода) электрический сигнал также трижды меняет свой знак. Таким об- 45 разом, утроение частоты основано на том, что в оптимальном случае при подаче на входной элемент переменного напряжения с амплитудой Va.ex Еа, VTvBx V2
(где IBX - расстояние между электро- 50 дами входного элемента) и постоянного смещающего напряжения VCM 3 должно соблюдаться соотношение Va
2Еа,вх1вх/3 2 V5 EBXlex/3 2 V2 VBx/3. При этом напряжение на входном блоке меняет- 55 ся в течение периода примерно от -0,25 до +1,25 и снова до -0,25 , а величина А шесть раз меняет знак (что и соответствует утроению частоты).
Как мы уже говорили, для удвоения частоты достаточно, чтобы в течение одного периода входного напряжения величина поменяла свой знак только 4 раза. Для этого в оптимальном случае должно выполняться соотношение V2 Ealex vTEexlex , а постоянное напряжение должно быть равным VCM 2 0,5E2lex.
Описанный способ может быть реализован только с помощью специального устройства, которое может существовать в различных вариантах. Для пояснения способа опишем подробно один из этих вариантов.
На фиг. 3 представлено устройство, состоящее из жесткого корпуса 1, изготовленного из изолирующего материала или покрытого жесткой электрической изоляцией (например, эмалью). Длина его внутреннего зазора равна L В зазор вклеены нелинейный и линейный элементы 2 и 3 входного блока, которые могут состоять из одного диска (или пластинки) электрострикторного или пьезоэлектрического материала соответственно, или же, если нужно повысить отношение VBBIX/VBX, из нескольких, причем все упомянутые элементы соединены друг с другом параллельно, а также выходной блок 4, который может состоять из одного пьезоэлемента или же, если надо повысить силу тока через нагрузку, из нескольких пьезоэлементов. Общая длина всех элементов (2, 3 и 4), включающая толщину клеевых прослоек, равна L Имеются также источник постоянного смещающего напряжения 5 и, естественно, источник преобразуемого переменного напряжения 6.
Электрострикторный элемент 2 при данной конструкции устройства в результате приложения электрического напряжения любой полярности всегда будет удлиняться. Входной пьезоэлектрический элемент 3 в зависимости от направления в нем остаточной поляризации и знака приложенного напряжения будет или удлиняться, или сокращаться. Если при положительном знаке приложенного электрического напряжения элемент 2 удлиняется, а элемент 3 сокращается, то суммарная деформация этих двух преобразователей равна разности их деформаций. Поскольку неизменность длины зазора L обеспечивается жесткостью корпуса 1, деформация элементов 2 и 3 входного блока создает деформацию в блоке 4, которая в свою очередь создает выходное электрическое напряжение, пропорциональное разности деформаций электрострикторных и пьезоэлектрических элементов 2 и 3 входного блока.
Оценим деформацию выходного пье- зопреобразователя 4: Авых. Пусть блоки 2, 3 и 4 характеризуются длинами I и площадями поперечного сечения S с индексами эс, пэ и вых соответственно. Представим себе, что сначала вся система преобразователей не вставлена в зазор и находится в свободном состоянии, причем суммарная длина этой системы за счет удлинения элементов входного блока возросла на величину А и стала равной L + А . Для того чтобы теперь вставить систему в зазор, нужно поджать ее на А.Тогда каждый из блоков сожмется на величину AJ. Для расчета величин A i учтем, что на каждый блок действует одинаковая сила F Oj Si. Поскольку ст, YI Ai /Ij, где YI - модуль Юнга, то, принимая для простоты расчетов, что Y3c «Yn3-iYBbix (поскольку материал тех и других блоков является, как правило, сегнетоэлек- трической керамикой, модули Юнга двух родственных материалов могут не отличаться существенно друг от друга), получим два независимых уравнения
Асэ 5эс/1эс Апэ 5пэ/1пэ, АпэЗпэЛпЭ АВЫХ 5выхЛвых.
Третьим уравнением является
АЭС + Апэ -ЬАзых А.
Решая эту систему уравнений, получаем
Авых -
5эс5пэ вых
5эс5пэ вых + ЗэсЗвых пэ + 5пэ$вых1эс
Для простоты обсуждения положим 1Эс пэ, Зэс Зпэ. Тогда
Азых
Ээс вых
Зэс вых + 25вых
А.
вьшэс
Полагая 1Вых/ эс Я , 5вых/5эс в, получим
Из этой формулы видно, что при , т.е. при уменьшении поперечного сечения выходного пьезопреобразователя Азых стремится к А, тогда как при заданной величине в и увеличении А величина Азых также возрастает, приближаясь к А
Возьмем для примера реальные значения Аи в Л 2,0 0,25, т.е. длину выходного преобразователя равной сумме длин входных преобразователей, а его диаметр (если речь идет о дисках) в два раза меньше диаметра входных элементов. Тогда АЗЫХ 0,8 А.
Рассчитаем выходное напряжение. Для этого исходя из кривых на фиг. 1 и известных величин 1Пэ и Lac построим зависимости
10
15
20
25
30
35
40
45
50
55
Д1пэ(/) и A l3c(V), найдем точки их пересечения и определим соответствующие им величины V2 и V3. Тогда условием наибольшего выхода второй гармоники будет Va,Bx
- V2vBx V2, откуда найдем деформацию пьезоэлектрического элемента входного блока (A lna)v - V2 , где dss - пьезомодуль. Полагая, что при 1Пэ 1эс амплитуда второй гармоники будет определяться разностью Idilnldzl,т.е.величиной
5а ( I + I&I) /2, можно сделать вывод, что амплитудная величина абсолютной деформации Аа (пропорциональная (5а) составляет 20,7% от ( А ПЭ)У - V2. Если мы возьмем то же соотношение размеров, что и ранее, т.е. А 2, в 0,25, Вых 21ЭС 21ПЭ, Звых 0,255Эс 0,255пэ, когда мы получили Аеых 0,8А , то придем к выводу, что Аа. вых 16,6%(Alna)v-V2. Когда произведе- ние пьезоэлектрических констант с ззпзз близко к единице, выходное напряжение можно рассчитать как , вых /das. Отсюда следует, что /а,Вых 16, 16,,в . Это же относится и к эффективным значениям напряжения.
Условие получения наибольшего выхода третьей гармоники /а,вых 1,5V2. Величины (5аиДа имеют те же значения. Таким образом, выход третьей гармоники будет меньше в 1,5 раза и будет составлять 16,6%/1,5 11% от входного напряжения, т.е. будет все-таки больше, чем в случае прототипа.
Достоинством изобретения является возможность дальнейшего увеличения выхода гармоник. Если мы составим элементы 2 и 3 входного блока из пЭс и ппэ пластинок или дисков соответственно и для простоты положим пэс ппэ п (хотя это равенство не является обязательным), мы сможем получить ту же величину деформации А при входном напряжении, меньшим в п раз, если при этом величины Эс и Пэ будут в п раз меньше. Например, если входные преобразователи имеют толщину 5 мм и при п 1 требуют входного напряжения 2 кВ, чтобы обеспечить выходное напряжение 200 В, то при п 10 указанное выходное напряжение будет обеспечиваться при входном напряжении 200 В, подаваемом на каждый из элементов толщиной 0,5 мм. Тогда VBbix/VBx
-100%. При большем п можно получить VBbix VBX. Ясно, что предел повышения величины указанного соотношения этим не ограничивается, так как современная технология сегнетокерамики позволяет легко получить так называемые сегнетокерамические пленки толщиной 50 мкм и тоньше.
Далее покажем, что совокупность существенных признаков, отраженных в формуле изобретения, является новой по сравнению с решениями, известными в науке и технике.
Как было показано, для преобразования частоты входного электрического сигнала в электрический сигнал с другой частотой впервые обоснована целесообразно преобразования электрического сигнала в меха- нический и обращено внимание на то, что в отличие от нелинейности диэлектрической поляризации нелинейность электрострик- торного преобразователя осуществляется уже в слабых полях, что позволяет значи- тельно повысить процент выхода гармоник. Таким образом, использование хорошо известных способов преобразования электрического сигнала в механический и хорошо известных зависимостей в сочетании с уче- том их особенностей позволило по новому решить задачу преобразования частоты и обеспечить более высокий процент выхода гармоник. Впервые предложено компенса- цию сигнала осуществлять на том этапе, ког- да сигнал представляет собой периодически меняющуюся механическую деформацию, и-преобразование в электрический сигнал только разностной деформации, что позволяет обойтись без последующей электрической компенсации сигнала.
Графическое определение выхода гармоник по зависимостям A Ina(V) и Al3c(V) для различных комбинаций материалов показа- ло, что с отклонением соотношения 0,5 Vs/Va от единицы выход гармоник понижается, хотя преимущество перед прототипом еще сохраняется, пока указанное соотношение больше 0,9 и меньше 1,2. Это преиму- щество сохраняется и при отклонении напряжений, подаваемых на вход, от оптимальной величины, а именно при условии, что 2 VCM.2/W и VBX/V2 (в случае генерации второй гармоники) или 2VCw.3/V3 и 1,333 VBx/V3(B случае генерации третьей гармоники) лежат в пределах от 0,8 до 1,2.
Объединение устройств предлагаемого типа в каскады может позволить высокоэффективное получение более высоких гармоник. Например, в случае двух удваивающих и одного утраивающего преобразователей частоты в каскаде можно получить двенадцатую гармонику.
Предлагаемый способ может найти применение для питания радиотехнических и электротехнических устройств, для изготовления устройств с переключаемой частотой и возможно, для сигнальных устройств.
Формула изобретения
Способ безрезонансного формирования низкогармонического переменного электрического напряжения, при котором воздействуют входным электрическим сигналом и постоянным смещающим электрическим напряжением на линейные и нелинейные элементы преобразователя, производят компенсацию сигнала по основной частоте на линейных и нелинейных элементах и снимают его с выхода преобразователя, отличающийся тем, что, с целью повышения эффективности за счет увеличения амплитуды выходного сигнала, компенсацию сигнала по основной частоте осуществляют путем его преобразования в механическую деформацию разных знаков, жестко связанных между собой пьезоэлектрического и электрострикционного элемента и передают их разностную деформацию на дополнительный пьезоэлектрический линейный элемент, с которого снимают выходной сигнал.
,лШ f В.ЮЧ
-W)m
(ti/t).
ЙС
.
/
X
X
/
cf
75
(Al/l)
пэ
(йиг.1
Изобретение относится к приборостроению и может быть использовано в горнодобывающей, металлургической, химической и других отраслях промышленности для контроля уровня материала, например горной массы, в подземных емкостях. Цель изобретения - повышение разрешающей способности устройства. В устройство, содержащее два датчика сейсмических колебаний, размещенных на разном расстоянии от подземной емкости и подключенных к измерительному блоку, который состоит из двух формирователей, регистра сдвига, генератора тактовых импульсов, элементов совпадения, связанных выходами со счетчиками импульсов, блока запоминания и обработки введены элементы ИЛИ, многоканальный коммутатор и блок управления. Вызванный ударами падающего материала сигнал от ближнего датчика поступает через первый формирователь на информационный вход регистра, а с его выходов задержанный сигнал подается через элементы ИЛИ на первые входы первой группы элементов совпадения и, кроме того, через коммутатор на первые входы второй группы элементов совпадения. Запаздывающий сигнал отдаленного датчика через второй формирователь и элемент совпадения, подключенный вторым входом к генератору, поступает на вторые входы элементов совпадения обеих групп, на третьи входы которых подаются сигналы от блока управления. На адресный вход коммутатора из блока управления подается код номера группы выходов регистра, определяемый номером счетчика из первой группы счетчиков, переполненного в предыдущем цикле измерения. С помощью второй группы элементов совпадения и счетчиков определяется величина дополнительной задержки опережающего сигнала ближнего датчика до момента его совпадения с сигналом отдаленного датчика. Фиксируемые блоком запоминания и обработки коды номеров счетчиков, переполненных раньше остальных в первой и второй группах, характеризуют величину взаимного временного сдвига сигналов и соответственно высоту контролируемого уровня. Измерение осуществляется в разном масштабе времени, благодаря чему число дискретных значений контролируемого уровня равно произведению числа элементов совпадения и счетчиков в первой группе на их число во второй группе. 3 ил. СП С 4 CJ VJ О О 00
Фаг.2
/ г
I
Вход g
-
Выход -о
Фиг.Ъ
| Казарновский Д.М | |||
| Емкостные преобразователи частоты | |||
| Л.: Энергия, 1968, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
