-ч
U Ю
- 00
ел
Изобретение относится к созданию высокоточных приборов для измерения линейных перемещений и может быть использовано в любой отрасли народного хозяйства.
Известен цифровой датчик линейных перемещений, содержащий генератор переменного тока, выход которого подключен к бифилярной обмотке, уложенной в пазы кодового элемента, выполненного в виде двухзаходного винта, два усилителя импульсных сигналов, выходы которых подключены через соединенные последовательно фазовый дискриминатор, триггер и формирователь счетных импульсов к входу двоич- ного счетчика. В устройство дополнительно введены две подвижные считывающие головки, выполненные в виде ферритовых пластин с пазами, шаг которых кратен шагу бифилярной обмотки.
Недостатками данного устройства являются сложность конструкции и необходимость изготовления специальных элементов, например, двухзаходного винта с бифилярной обмоткой и подвижных считы- вающих головок, у которых шаг пазов должен быть кратен шагу бифилярной обмотки.
Извеоен преобразователь линейного перемещения во временной интервал, содержащий постоянный магнит, укреплен- ный на объекте перемещения, два мультивибратора, индуктивно связанные с постоянным магнитом, генератор импульсов, элемент задержки и триггер.
Данное устройство не обеспечивает точности измерения и имеет значительную погрешность преобразования при воздействии дестабилизирующих факторов, например, температуры.
Известны индуктивные измерители пе- ремещечия, содержащие автогенератор, измеритель амплитуды и две измерительные цепи, состоящие из индуктивных датчиков и конденсаторов, в которых измеритель амплитуды подключен к точкам соединения датчиков с конденсаторами.
Недостатками данных устройств являются наличие стрелочного измерителя амп- литуды, вносящего дополнительную погрешность, и непостоянство выходного сигнала при изменении дестабилизирующих факторов, например, напряжения питания.
Наиболее близким по технической сущности к предлагаемому устройству является устройство для измерения приращений физических величин, содержащее генератор стабильной частоты, квадратурную цепь, со- стоящую из образцового элемента и последовательно подключенного датчика, блок
сравнения, подключенный к квадратурной цепи, и индикатор, которое снабжено тремя делителями частоты, элементом запрета, двумя реверсивными счетчиками, формирователь логического уровня, формирователем импульсов управления, триггером управления, коммутатором, двухполюсным коммутатором на два направления, источником управляющего напряжения, эталонным элементом, причем первый и второй делители частоты и элемент запрета подключен входами к генератору стабильной частоты, первый делитель частоты выходом соединен с первым входом блока сравнения, второй делитель частоты выходом соединен с обоими реверсивными счетчиками и вторым входом элемента запрета, элемент запрета выходом подключен к третьему делителю частоты , выполненному управляемым, первый реверсивный счетчик установочными выходами соединен с установочными входами третьего делителя частоты, который выходом соединен с датчиком и эталонным элементом, формирователи импульсов управления и логического уровня входами подключены к выходу блока сравнения, выход формирователя логического уровня подключен к второму входу первого реверсивного счетчика, выход формирователя импульсов управления через триггер управления коммутатором подключен к управляющему входу двухполюсного коммутатора, который входами первого направления подключен соответственно к датчику и эталонному элементу, а выходом - к второму входу блока сравнения, входами второго направления - к двум выходам источника управляющего напряжения, а выходом - к второму входу второго реверсивного счетчика, цифровым индикатором, подключенным к выходу второго реверсивного счетчика.
Недостатком данного устройства является необходимость в эталонном и образцовом элементах, к параметрам которых предъявляются жесткие требования при тиражировании устройства и зависимость этих параметров от влияния дестабилизирующих факторов, например, температуры и времени,
Одним из перспективных путей создания высокоточных приборов контроля перемещения - использование индуктивных преобразователей с цифровым отсчетом результата измерения.
Цель изобретения - отказ от необходимости в образцовых и эталонных элементах и, следовательно, влияния дестабилизирующих факторов.
Поставленная цель достигается тем, что цифровой преобразователь линейных перемещений содержит две измерительные цепи, каждая из которых выполнена из катушки индуктивности и конденсатора, включенных параллельно и составляющих дифференциальный мост, последовательно соединенных с усилителем мощности и трансформатором, включенных между выходом первого генератора и выводами катушек индуктивности измерительных цепей, и второй генератор, выходом подключенный к второму входу блока ключей, третий вход которого соединен с входом триггера и выходом блока сравнения, вход которого подключен к выходам измерительных цепей, а выходы блока ключей соединены соответственно с входами прямого и обратного счета реверсивного счетчика.
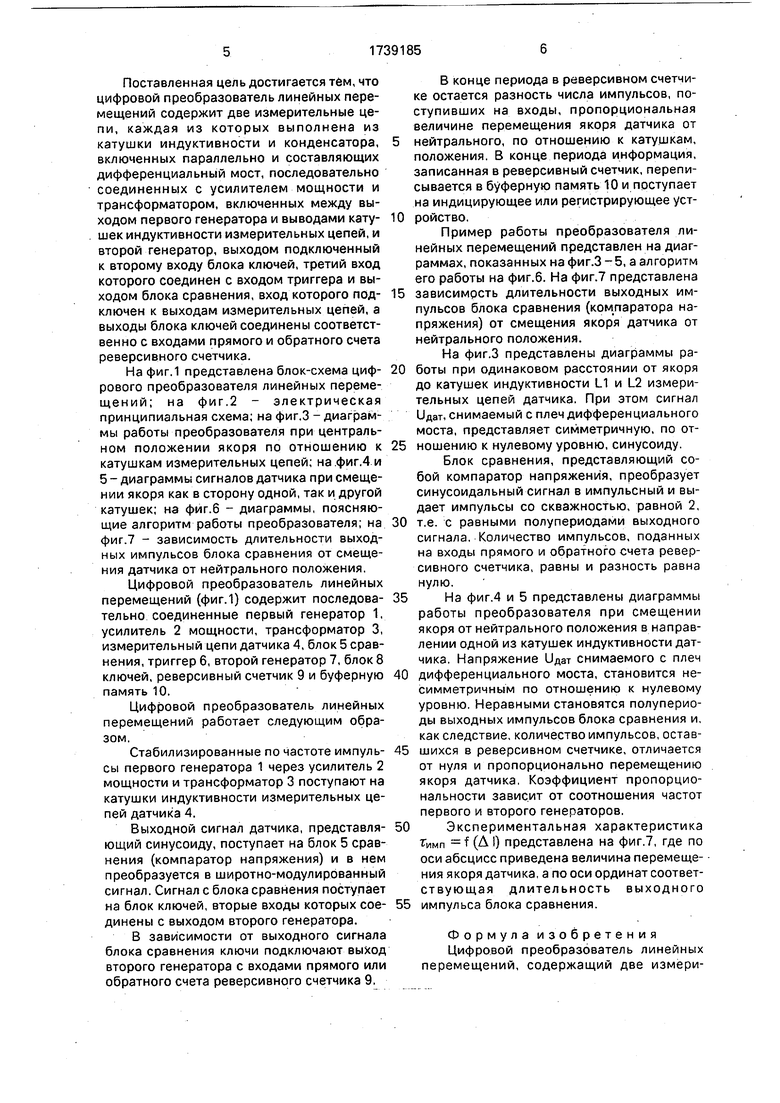
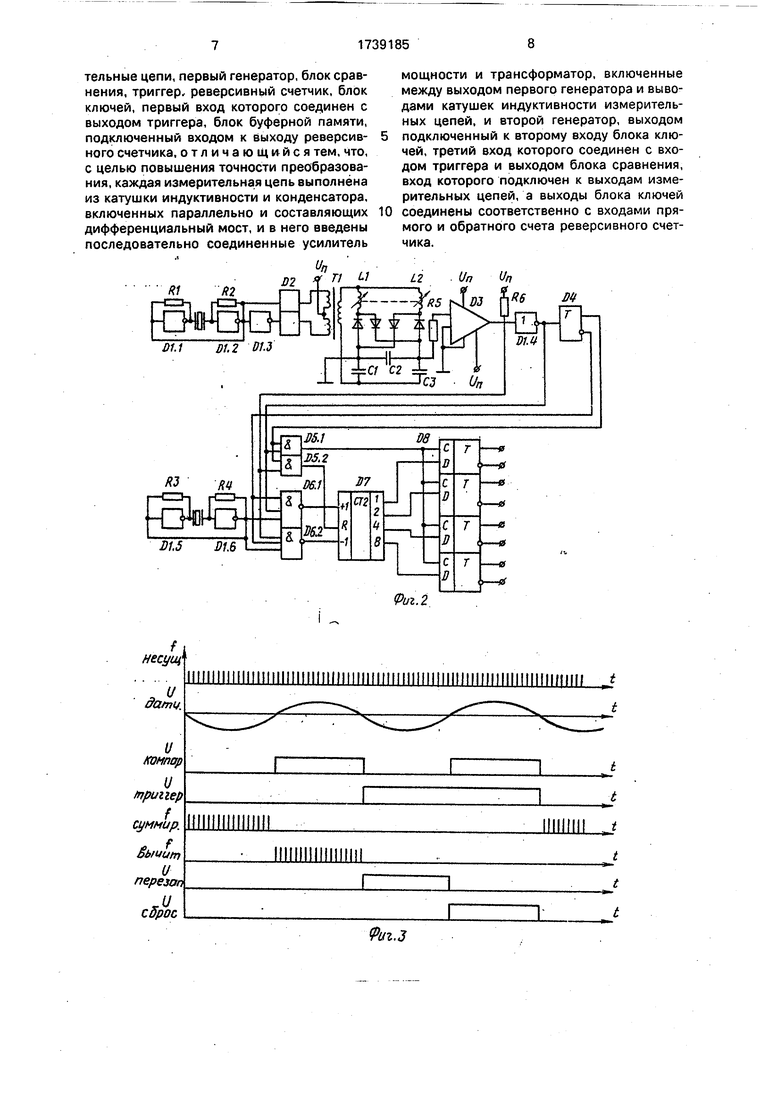
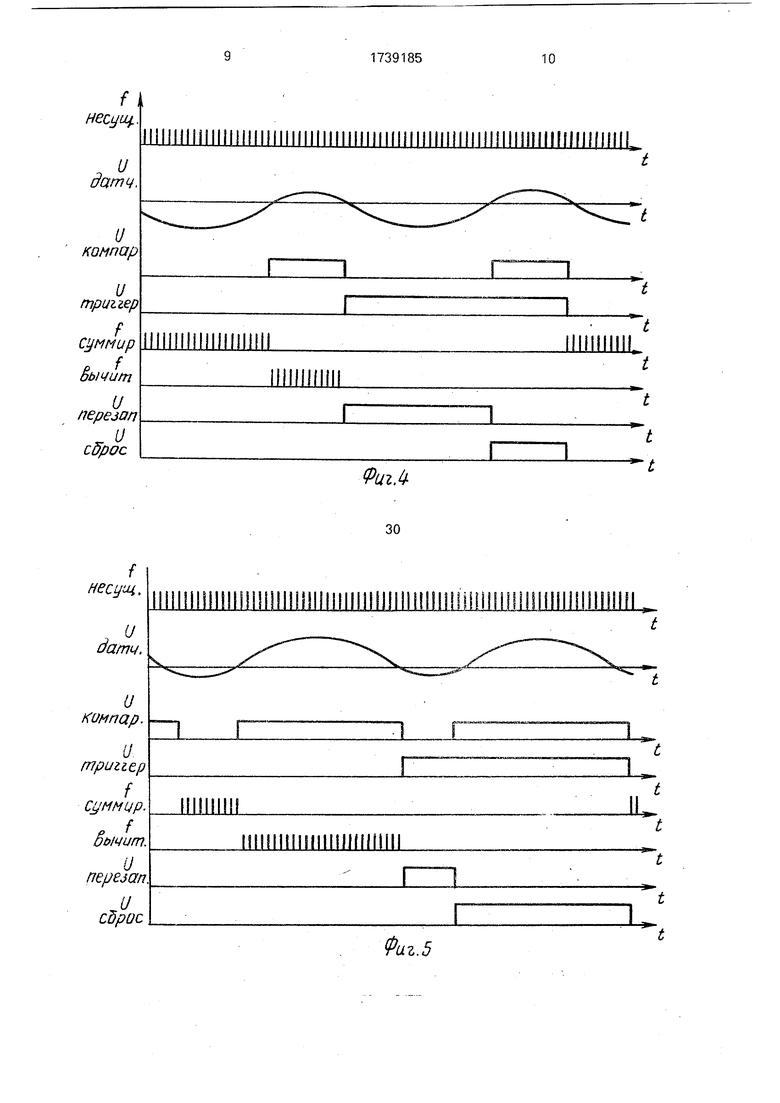
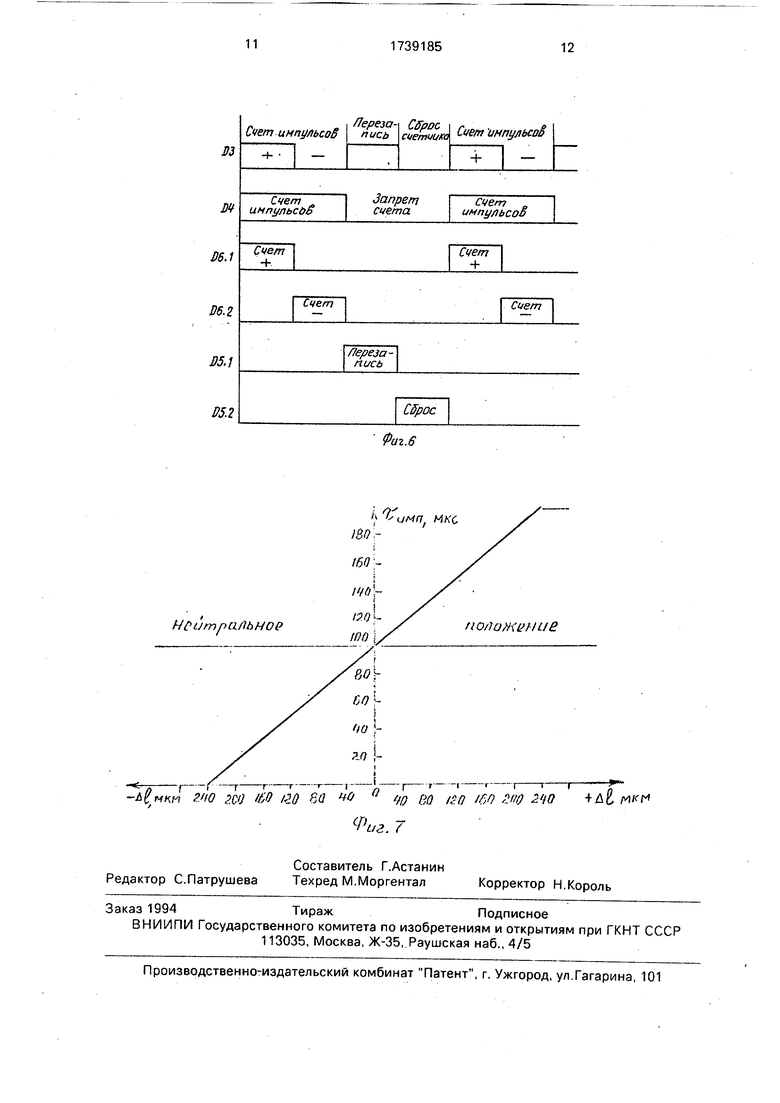
На фиг.1 представлена блок-схема цифрового преобразователя линейных перемещений; на фиг.2 - электрическая принципиальная схема; на фиг.З - диаграммы работы преобразователя при центральном положении якоря по отношению к катушкам измерительных цепей; на фиг.4 и 5 - диаграммы сигналов датчика при смещении якоря как в сторону одной, так и другой катушек; на фиг.6 - диаграммы, поясняющие алгоритм работы преобразователя; на фиг.7 - зависимость длительности выходных импульсов блока сравнения от смещения датчика от нейтрального положения.
Цифровой преобразователь линейных перемещений (фиг.1) содержит последовательно соединенные первый генератор 1, усилитель 2 мощности, трансформатор 3, измерительный цепи датчика 4, блок 5 сравнения, триггер 6, второй генератор 7, блок 8 ключей, реверсивный счетчик 9 и буферную память 10.
Цифровой преобразователь линейных перемещений работает следующим образом.
Стабилизированные по частоте импульсы первого генератора 1 через усилитель 2 мощности и трансформатор 3 поступают на катушки индуктивности измерительных цепей датчика 4.
Выходной сигнал датчика, представляющий синусоиду, поступает на блок 5 сравнения (компаратор напряжения) и в нем преобразуется в широтно-модулированный сигнал. Сигнал с блока сравнения поступает на блок ключей, вторые входы которых соединены с выходом второго генератора.
В зависимости от выходного сигнала блока сравнения ключи подключают выход второго генератора с входами прямого или обратного счета реверсивного счетчика 9.
В конце периода в реверсивном счетчике остается разность числа импульсов, поступивших на входы, пропорциональная величине перемещения якоря датчика от
нейтрального, по отношению к катушкам, положения. В конце периода информация, записанная в реверсивный счетчик, переписывается в буферную память 10 и поступает на индицирующее или регистрирующее устройство.
Пример работы преобразователя линейных перемещений представлен на диаграммах, показанных на фиг.З -5, а алгоритм его работы на фиг.б. На фиг.7 представлена
зависимость длительности выходных импульсов блока сравнения (компаратора напряжения) от смещения якоря датчика от нейтрального положения.
На фиг.З представлены диаграммы работы при одинаковом расстоянии от якоря до катушек индуктивности L1 и L2 измерительных цепей датчика. При этом сигнал Uдат, снимаемый с плеч дифференциального моста, представляет симметричную, по отношению к нулевому уровню, синусоиду.
Блок сравнения, представляющий собой компаратор напряжения, преобразует синусоидальный сигнал в импульсный и выдает импульсы со скважностью, равной 2,
т.е. с равными полупериодами выходного сигнала. Количество импульсов, поданных на входы прямого и обратного счета реверсивного счетчика, равны и разность равна нулю.
На фиг.4 и 5 представлены диаграммы работы преобразователя при смещении якоря от нейтрального положения в направлении одной из катушек индуктивности датчика. Напряжение Удат снимаемого с плеч
дифференциального моста, становится несимметричным по отношению к нулевому уровню. Неравными становятся полупериоды выходных импульсов блока сравнения и, как следствие,количество импульсов,оставшихся в реверсивном счетчике, отличается от нуля и пропорционально перемещению якоря датчика, Коэффициент пропорциональности зависит от соотношения частот первого и второго генераторов.
Экспериментальная характеристика Тимп - f (A I) представлена на фиг.7, где по оси абсцисс приведена величина перемещения якоря датчика, а по оси ординат соответ- ствующая длительность выходного
импульса блока сравнения.
Формула изобретения Цифровой преобразователь линейных перемещений, содержащий две измерительные цепи, первый генератор, блок сравнения, триггер, реверсивный счетчик, блок ключей, первый вход которого соединен с выходом триггера, блок буферной памяти, подключенный входом к выходу реверсивного счетчика, отличающийся тем, что, с целью повышения точности преобразования, каждая измерительная цепь выполнена из катушки индуктивности и конденсатора, включенных параллельно и составляющих дифференциальный мост, и в него введены последовательно соединенные усилитель
Ь
D2 К2
Г U
j
2)1.5
мощности и трансформатор, включенные между выходом первого генератора и выводами катушек индуктивности измерительных цепей, и второй генератор, выходом подключенный к второму входу блока ключей, третий вход которого соединен с входом триггера и выходом блока сравнения, вход которого подключен к выходам измерительных цепей, а выходы блока ключей соединены соответственно с входами прямого и обратного счета реверсивного счетчика.
U
L2
ОН
f J
несущ..
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой преобразователь линейных перемещений | 1991 |
|
SU1796882A1 |
| Цифровой преобразователь линейных перемещений | 1991 |
|
SU1809293A1 |
| Индуктивный измеритель перемещений | 1990 |
|
SU1744434A1 |
| ЭЛЕКТРОННО-МЕХАНИЧЕСКИЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНЫХ РАЗМЕРОВ | 1992 |
|
RU2075725C1 |
| Устройство для измерения линейных перемещений | 1981 |
|
SU1013734A1 |
| Устройство для измерения вибрации и перемещений | 1989 |
|
SU1665235A2 |
| Аналого-цифровой преобразователь | 1977 |
|
SU656206A1 |
| Цифровой измеритель добротности | 1988 |
|
SU1647456A1 |
| Устройство для измерения линейного перемещения | 1981 |
|
SU1113662A1 |
| Аналого-цифровой преобразователь | 1984 |
|
SU1352619A1 |
Изобретение относится к контрольно- измерительной технике, в частности к области измерения неэлектрических величин электрическими методами, и может быть использовано в различных устройствах для измерения величины перемещения. Целью изобретения является повышение точности измерения. Поставленная цель достигается тем, что в цифровой датчик линейных перемещений, включающий две измерительные цепи, каждая из которых состоит из катушки индуктивности и конденсатора, включенных параллельно, дополнительно введен кварцевый генератор 1, соединенный через усилитель 2 мощности и трансформатор 3 с катушками индуктивности датчика 4, к которым подключен компаратор 5 напряжения, выходы которого связаны с ключами 8. Реверсивный счетчик 9, входы которого связаны с выходом второго кварцевого генератора 7 несущей частоты, соединен с буферной памятью 10, в которую записывается величина информации о величине пере- мещения. Чувствительность датчика регулируется изменением емкости дополнительного конденсатора, шунтирующего плечи дифференциального моста. 7 ил. (Л с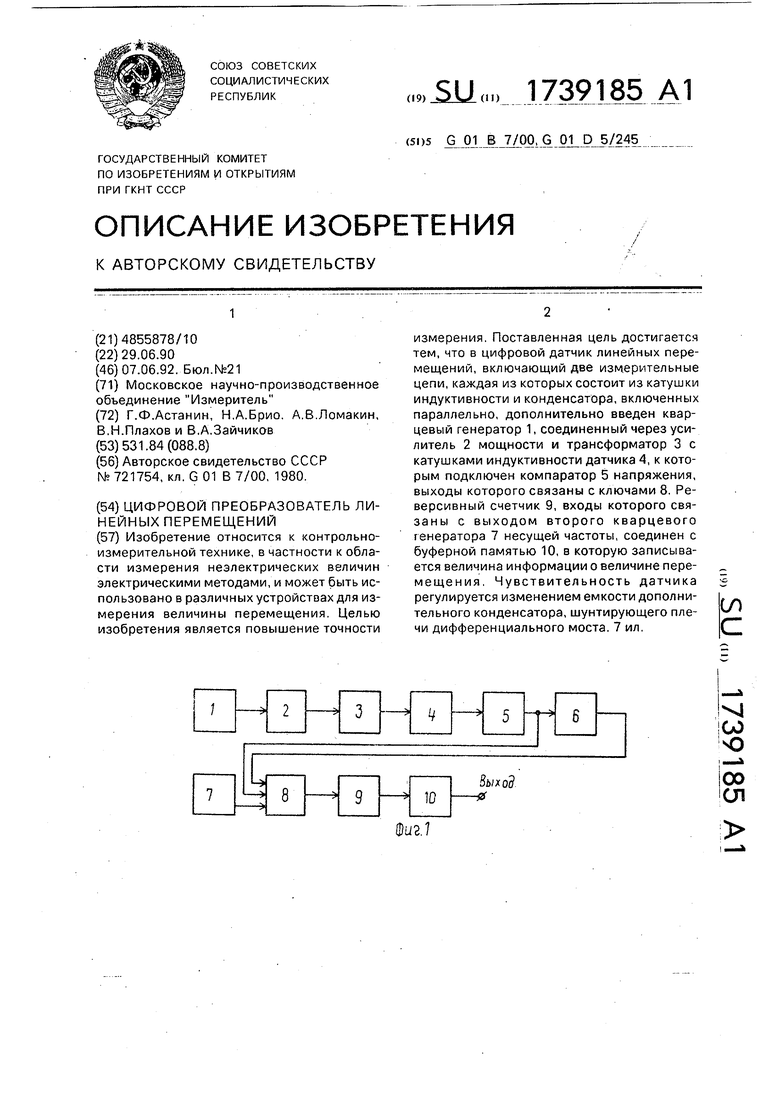
дцтч.
пнякпм
Г
liliiilllil.
ФигЛ
t
Риг.5
HCumpllfthHOP
-А$мкм г /О рЛ Ц0 ° 40 BQ if О Ю 2W 240 +&1
Составитель Г.Астанин Редактор С.Патрушева Техред М.МоргенталКорректор Н.Король
Заказ 1994ТиражПодписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
i Ъ амп/ МКС
ISQФиг. 7
| Устройство для измерения приращений физических величин | 1977 |
|
SU721754A1 |
