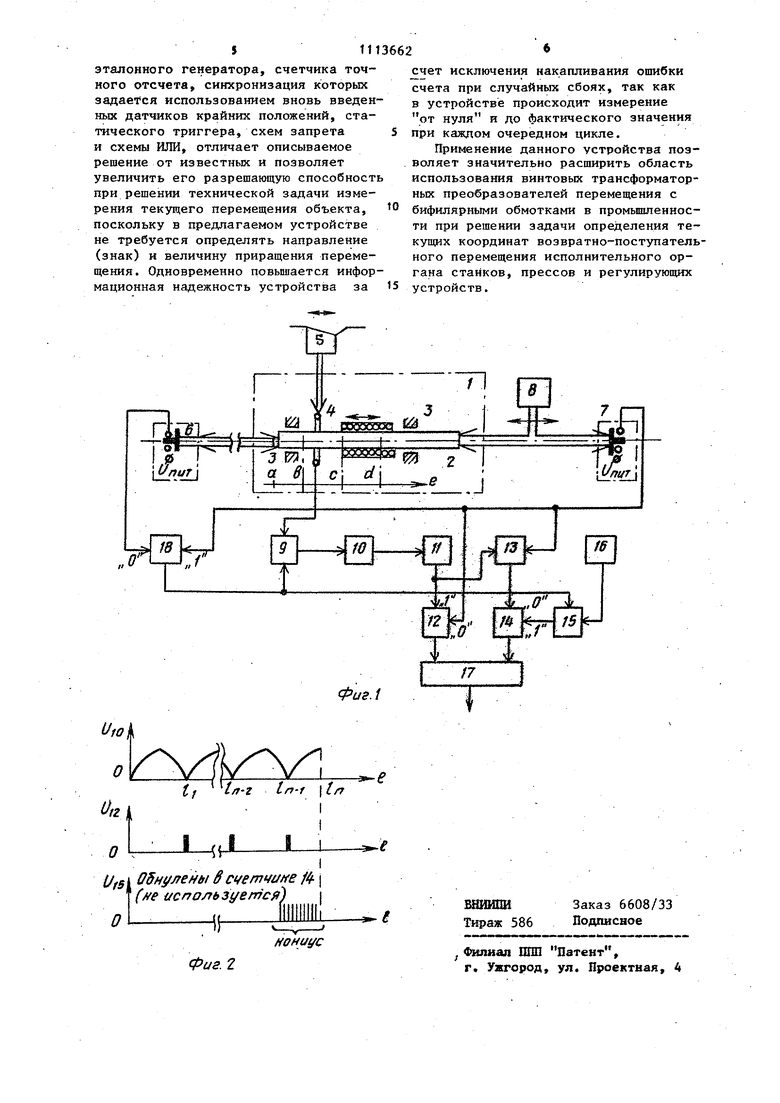
Изобретение относится к автоматике, а именно к преобразователям неэлектрических величин в электрические и может быть использовано в промьппленности для определения текущих координат перемещения механизмов, например дроссельного клапана-скалки, задающего величину давления в гидравлических прессах. Известно устройство для измерения перемещений, содержащее два автогенератора, первичньй преобразователь, состоящий из двух катущек индуктивности со стержневым сердечником, подключенных к соответствующему автогенератору, и блок обработки информации входами соединенный с соответствующими вькодами автогенераторов СП. Недостатками этого устройства являются низкая разрещающая способность при измерении мальгх перемещений объекта и невозможность существенно увеличить величину диапазона перемещений. Наиболее близким по технической сущности к изобретению является устройство для измерения линейного перемещения, содержащее винтовой трансформаторньй датчик, стержень статора которого и подвижная катушка ротора намотаны бифилярными обмотками, а для обработки выходного сигнала исполъзуется вьтрямитель выходного напряжения, компаратор фазы или амплитуда и счетчик экстремальных значений 121 Однако данное устройство также име ет низкую разрешающую способность,кото рая определяется диаметром провода бифи лярной намотки и измерение осуществляется подсчетом количества экстремельных точек выходного напряжения (амплитуды или фазы) на измеряемой длине перемещения, причем в случае случайного сбоя информация не восстанавливается и значение ошибки накапливается. В подобном устройстве не рещена задача предварительного определения знака (направления) очередно го возвратно-поступательного микроперемещения. Цель изобретения - увеличение разрешающей способности и информационной надежности устройства при том же значении диаметра пройода, исполь зуемого при бифилярной намотке. Поставленная цель достигается тем что устройство для измерения линейнонего перемещения, содержащее винтодай трансформаторный датчик с бифилярной обмоткой стержня статора, обмотку ротора, соединяемую с перемещающимся объектом, вьтрямитель, подключенный к выходу обмотки,ротора и соединенный с входом компаратору, к выходу которого подключен счетчик экстремальных значений, снабжено возвратно-поступательным механизмом, механически соединенным со стержнем статора, имеющим возможность перемещения вдоль своей оси, датчиками правого и левого крайних положений стержня статора, статическим триггером, единичный и нулевой входы которого подключены к выходам датчиков правого и левого крайних положений стержня статора соответственно,счетчиком младщих разрядов, эталонным генератором, двумя схемами запрета, управляюцие входы которых подключены к выходу статического триггера, информационный вход одной из схем запрета подключен к выходу обмотки ротора, а ее выход соединен через выпрямитель и компаратор со счетчиком экстремальных значений, информационный, вход второй схемы запрета соединен с выходом эталонного генератора, а выход - с входом счетчика младщих разрядов, схемой ИЛИ, через которую обнулякидий вход счетчика мпадщих разрядов соединен с выходами компаратора и датчика правого крайнего положения, соединенного с обнуляющим входом счетчика экстремальных значений, блоком индикации, к которому подключены выходы обоих счетчиков. Обмотка ротора выполнена в виде многовитковой небифилярной обмотки микропроводом с сумматорным диаметром провода обмотки ротора, равным диаметру провода бифилярной обмотки статора. На фиг. 1 показана структурная схема устройства в исходном крайнем правом положении датчика; на фиг. 2диаграмма, пояснянмцая работу устрой ства. Устройство содержит датчик 1, стержень статора 2, имекяций возможность совершать возвратно-поступательные движения и в крайнем левом положении выходящий на расстояние а-6 за пределы одной из двух (левой) опор 3, обмотку катушки ротора 4, выполненную в виде одного витка такого же, как обмотка статора, привода, либо В виде многожильной обмотки микропро водом, суммарный диаметр которой равен диаметру обмотки статора, а длина пропорциональна количеству витков (жил), перемещающийся объект 5, меха нически связанный с катушкой ротора 4, который может зажимать пространст венное положение в любой точке ft-с, датчики левого 6 и правого 7 крайних положений, возвратно-поступательный механизм 8, первую схему 9 запрета, вьшрямитель 10, компаратор 11 нуля, счетчик 12 экстремальных значений, схему 13 ИЛИ, счетчик 14 младших раз рядов, вторую схему 15 запрета, эталонный генератор 16, блок 17 индикации. Устройство работает следующим образом. Пусть (см. фиг. 1) перемещающийся объект 5 и соответственно катушка 4 находятся в любой точке линейного измерительного промежутка в-с, а равномерно перемещающийся с помощью .возвратно-поступательного механизма 8 стержень 2 находится в крайнем пра вом положении, при этом его катушка находится в линейном промежутке с-и/ и не имеет индуктивной связи с катуш кой 4, причем начало катушки совпадает с точкой с. Напряжение с выключившегося датчика 7 правого крайне го положения, в качестве которого может быть использован конечный выключатель, поступит непосредственно и через схему 13 ИЛИ на обнуляющие входы счетчиков 12 и 14, а также на единичный вход статического триггера 18, вькодной сигнал с которого включит схемы 9 и 15. При осуществлении рабочего измерительного хода стержен статора вместе со своей катушкой начинает движение влево, при этом выключается датчик 7, и через некоторое время катушки статора и ротора всту-пают в индуктивное взаимодействие, а выпрямленное высокочастотное напря жение с вьтрямителя 10 поступает на компаратор 11. При дальнейшем движении катушки 4 влево (см. фиг. 2) в точках 1, ..., Ij,,. h- компаратор вырабатьгаает одиночные импульсы, которые поступают на счетный вход счетчика 12 старщих разрядов и через схему. 13 ИЛИ на обнуляющий вход нониусного счетчика 14 младших разрядов . Затем на счетный вход нониусного счетчика через схему запрета пос тупают импульсы с генератора 16. предположим, что в точке 1 п-и закончилось измерение целого числа полупериодов и стержень 2 занял крайнее левое положение, соответствующее точке 1ц на фиг. 2 (начало катушки переместилось в точку & , фиг. 1). Таким образом, счетчик 2 сосчитал це- , лое число полупериодов , эквивалентное, например, расстоянию в миллиметрах, если использовался для ка-, тушек обмоточный провод диаметром и с шагом намотки 1 мм, а счетчик 14 за время прохождения катушкой 4 расстояния от 1,4 ) до 1 и сосчитал количество импульсов, эквивалентное определенной доле шага намотки сотым или тысячным долям миллиметра в зависимости от тактовой частоты генератора 16. С выхода счетчиков значение текущего перемещения катушки 4 поступает на блок 17 индикации. При достижении стержнем 2 крайнего левого положения включается датчик 6, который переключает триггер 18, выключающий, в свою очередь, схемы 9 и 15 запрета, поэтому при последующем холостом движении стержня с катушкой слева направо импульсы через схемы запрета не проходят и показания устройства не изменяются. , В дальнейшем при возврате стержня в крайнее правое положение снова сработает датчик 7 и работа устройства повторится. Частота возвратнопоступательных движений определяется временем, через которое необходимо снимать с блока 17 индикации показа-. НИН о пространственном изменении положения объекта 5, поэтому движение стержня 2 может быть не только непрерывным, но и задаваться по определенному алгоритму. Для увеличения амплитуды выходного сигнала виток обмотки ротора не одножильный, а выполнен в виде обычной многовитковой (небифилярной) намотки микропроводом или проводом меньшего диаметра, причем суммарный диаметр провода многовитковой обмотки ро-тора равен диаметру одножильного витка провода обмотки ротора и соответственно диаметру провода обмотки статора. Введение в устройство возвратнопоступательного механизма, равномерно перемещающего стержень статора. эталонного генератора, счетчика точного отсчета, синхронизация которых задается использованием вновь введен ных датчиков крайних положений, статического триггера, схем запрета и схемы ИЛИ, отличает описываемое решение от известных и позволяет увеличить его разрешающую способност при решении технической задачи измерения текущего перемещения объекта, поскольку в предлагаемом устройстве не требуется определять направление (знак) и величину приращения перемещения. Одновременно повышается инфор мационная надежность устройства за чет исключения накапливания ошибки счета при случайных сбоях, так как в устройстве происходит измерение от нуля я до фактического значения при каждом очередном цикле. Применение данного устройства позволяет значительно расширить область использования винтовых трансформаторных преобразователей перемещения с бифилярными обмотками в промьшшенности при решении задачи определения текущих координат возвратно-поступательного перемещения исполнительного органа станков, прессов и регулирующих устройств.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой датчик линейных перемещений | 1990 |
|
SU1739185A1 |
| ПРИЕМОНАМАТЫВАЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2022900C1 |
| Устройство для регулирования и контроля производительности измельчителя | 1990 |
|
SU1791031A1 |
| Измеритель угловых перемещений | 1988 |
|
SU1603187A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1999 |
|
RU2175812C2 |
| Устройство для определения положения экскавационной машины в пространстве | 1980 |
|
SU937622A1 |
| Способ защиты электрической машины от коротких замыканий | 1987 |
|
SU1495896A1 |
| Устройство для программного управления намоточным станком | 1990 |
|
SU1784942A1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| Бесконтактная система зажигания для двигателей внутреннего сгорания | 1981 |
|
SU976123A1 |
1. УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ШтЕЙНОГО ПЕРЕМЕЩЕНИЯ, содержащее винтовой трансформаторный датчик с бифилярной обмоткой стержня статора, обмотку ротора, соединяемую с перемещающимся объектом, выпрямитель, подключенный к выходу обмотки ротора и соединенный с входом компаратора, к выходу которого подключен счетчик экстремальных значений, о тличающееся тем, чтб, с целью увеличения разрешающей способности и информационной надежности, оно снабжено возвратно-поступательным механизмом, механически соединенным со стержнем статора, имею1цим возможность перемещения вдоль своей оси, датчиками правого и левого крайних положений стержня статора, статическим триггером, единичный и нулевой входы которого подключены к выходам датчиков правого и левого крайних положений стержня статора соответственно, счетчиком младших разрядов, эталонным генератором, двумя схемами запрета, управляю1цие входы которых подключены к выходу статического триггера, информационньй вход одной из схем запрета подключен к выходу обмотки ротора, а ее выход соединен через выпрямитель и компаратор со счетчиком экстремальных значений, информационный вход второй схемы запрета соединен с выходом эталонного генератора, а вькод - с входом счетчика младших разрядов, схемой ИЛИ, через которую обнуляющий вход счетчика младших разрядов соединен с выходами компаратора и датчика правого крайнего положения, соединенного с обнуляющим входом счетчика экстремальных значений, блоком индикации, к которому подключены выходы обоих счетчиков. 2. Устройство по п. 1, отличающееся тем, что, с целью увеличения амплитуды выходного сигнала, обмотка ротора выполнена в виде многовитковой небифилярной обмотки микропроводом с суммарным диаметром , провода обмотки ротора, равным диаметру провода бифилярной обмотки статора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения перемещений | 1976 |
|
SU630521A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Фазорегулирующее устройство | 1960 |
|
SU145932A1 |
