Фиг.1
Изобретение относится к измерительной технике и может быть использовано для бесконтактного измерения размеров объекта, например, при механических испытаниях в условиях высоких температур.
Известно оптико-электронное устройство, содержащее управляемый генератор и источник импульсов оптического излучения, последовательно связанные приемник оптического излучения, усилитель, аналоговый переключатель, конденсатор хранения, дифференциальный усилитель и компаратор.
Недостаток указанного устройства состоит в следующем.
В нем обеспечивается исключение влияния внешней оптической помехи на инфор- мационный импульс, причем это справедливо для импульсов, продолжительность которых определяется временем разряда конденсатора хранения. Однако оно лишено средств, которые бы исключали влияние фонового излучения на форму огибающей видеосигнала с выхода датчика изображения, так как фоновое излучение воздействует различным образом на отдельные ячейки датчика изображения. Поэтому указанное устройство не обеспечивает получение достоверных результатов при механических испытаниях в условиях высоких температур.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для автоматического контроля геометрических размеров обьектов, содержащее последовательно соединенные датчик изображения на фоточувствительном приборе с зарядовой связью, видеоусилитель, фильтр и тактовый генератор, первый выход которого соединен с входом датчика изображения, а второй выход - с вторым входом видеоусилителя, и последовательно соединенные источник опорного напряжения, компаратор и счетчик. Устройство, кроме того, снабжено блоком управления частотой тактового генератора.
Недостатком известного устройства является недостаточная достоверность результатов измерений в условиях изменения температуры светящихся обьектов, вызванная тем, что изменением частоты тактового генератора достигается только стабилизация амплитуды видеосигнала с выхода датчика, содержащего линейный ФПЗС, но не исключается влияние фонового излучения на форму огибающей видеосигнала. При этом величина погрешности носит мультипликативный характер.
Цель изобретения - повышение достоверности результатов измерений за счет ис- ключения погрешностей от влияния фонового излучения на форму огибающей
видеосигнала с выхода датчика изображения.
Поставленная цель достигается тем, что устройство для автоматического контроля геометрических размеров объекта, содер0 жащее последовательно соединенные датчик изображения на приборе с зарядовой связью, видеоусилитель, фильтр и тактовый генератор, первый выход которого соединен с входом датчика изображения, а вто5 рой выход - с вторым входом видеоусилителя, и последовательно соединенные источник опорного напряжения, компаратор и счетчик, дополнено осветителем, блоком задержки и блоком управляе0 мого вычитания сигналов, первый и второй входы которого соединены соответственно с выходами фильтра и блока задержки, а выход подключен к второму входу компаратора, первый и второй входы блока задерж5 ки сигнала соединены соответственно с первым и вторым выходами тактового генератора, к третьему выходу которого подключен осветитель, четвертый выход тактового генератора подключен к третьему входу
0 блока управляемого вычитания, пятый - к второму входу счетчика, а выход датчика изображения соединен с третьим входом блока задержки.
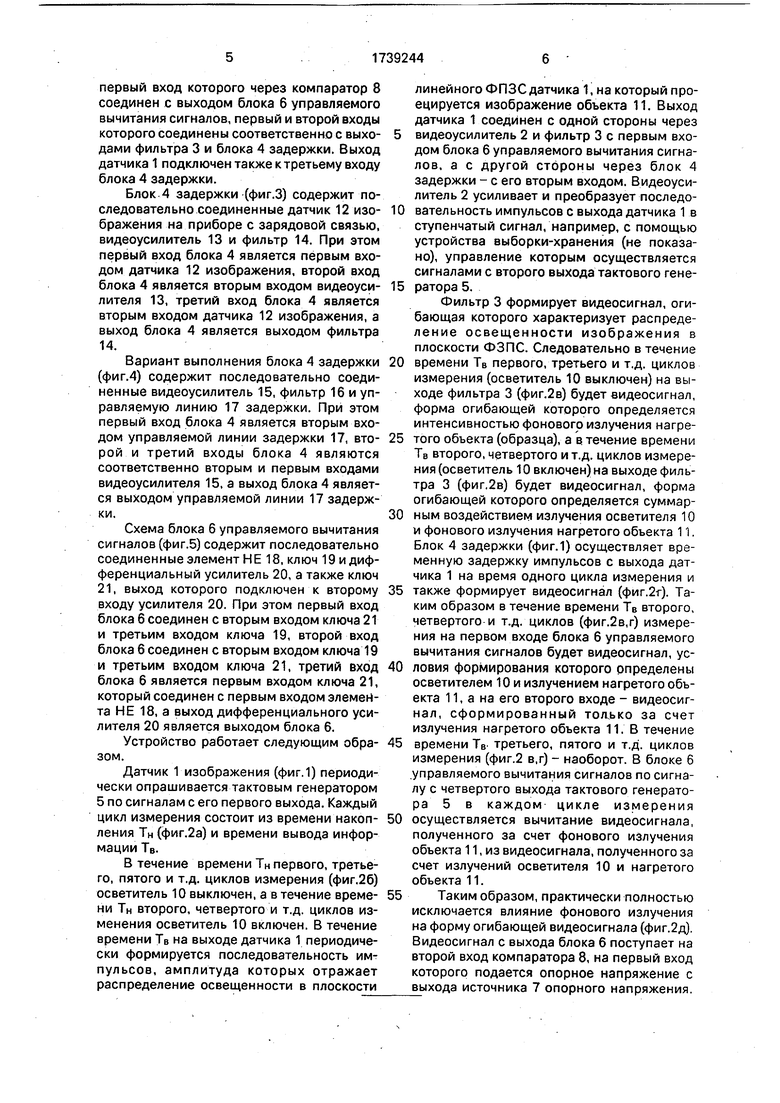
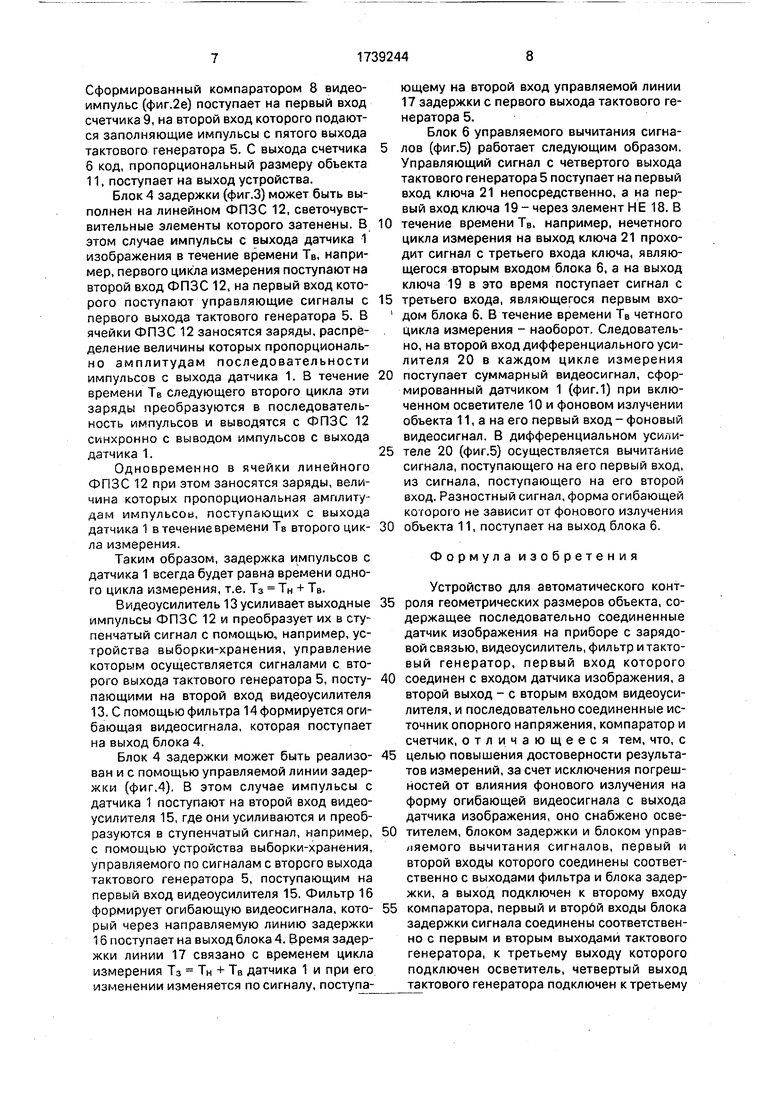
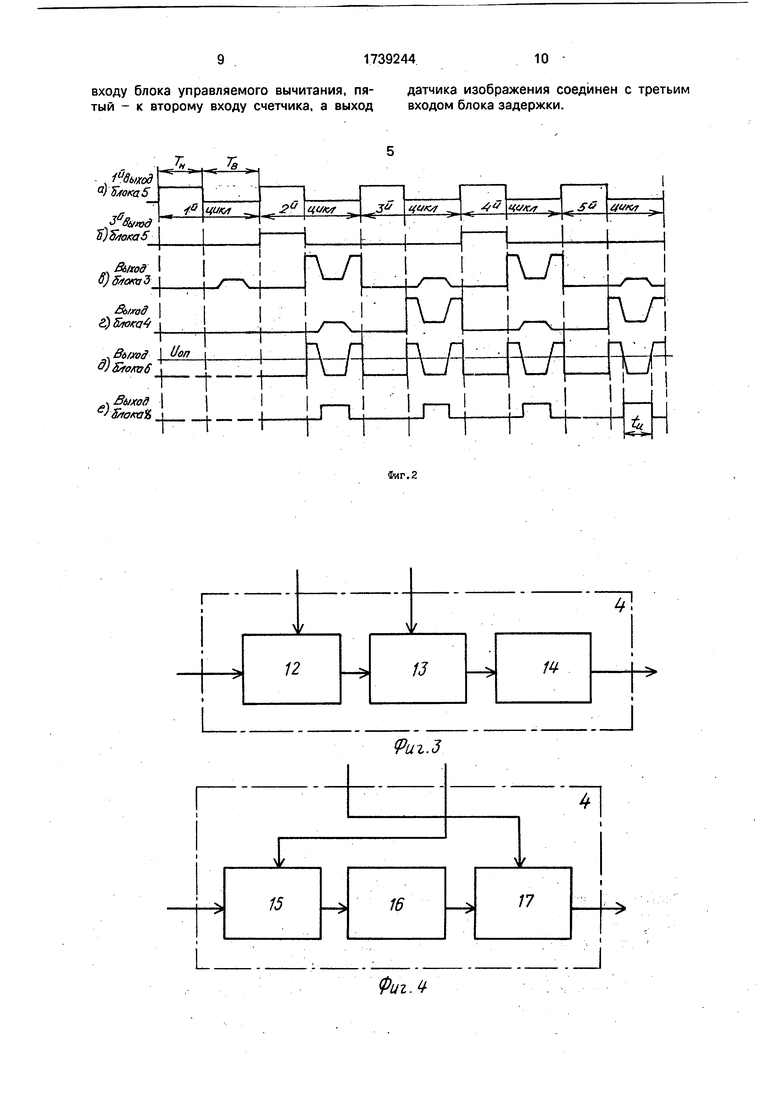
На фиг,1 представлена структурная схе5 ма устройства; на фиг.2 - временные диаграммы сигналов; на фиг.З - структурная схема блока задержки; на фиг.4 - структурная схема блока задержки, вариант; на фиг.5 - структурная схема блока управления
0 вычитания сигналов.
Устройство для автоматического контроля геометрических размеров объекта (фиг.1) содержит последовательно соединенные датчик 1 на приборе с зарядовой
5 связью видеоусилителем 2 и фильтр 3. Устройство включает блок 4 задержки, тактовый генератор 5, блок 6 управляемого вычитания сигналов, источник 7 опорного напряжения, компаратор 8, счетчик 9, осве0 титель 10, освещающий исследуемый объект 11. При этом первый выход тактового генератора 5 соединен с первым входом блока 4 задержки и входом датчика 1, второй выход генератора 5 соединен с вторыми
5 входами видеоусилителя 2 и блока 4 задержки, третий выход генератора 5 подключен к осветителю 10, четвертый выход генератора 5 соединен с третьим входом блока 6 управляемого вычитания сигналов, а его пятый выход - с вторым входом счетчика 9,
первый вход которого через компаратор 8 соединен с выходом блока 6 управляемого вычитания сигналов, первый и второй входы которого соединены соответственно с выходами фильтра 3 и блока 4 задержки. Выход датчика 1 подключен также к третьему входу блока 4 задержки.
Блок 4 задержки (фиг.З) содержит последовательно соединенные датчик 12 изображения на приборе с зарядовой связью, видеоусилитель 13 и фильтр 14. При этом первый вход блока 4 является первым входом датчика 12 изображения, второй вход блока 4 является вторым входом видеоусилителя 13, третий вход блока 4 является вторым входом датчика 12 изображения, а выход блока 4 является выходом фильтра 14.
Вариант выполнения блока 4 задержки (фиг.4) содержит последовательно соединенные видеоусилитель 15, фильтр 16 и управляемую линию 17 задержки. При этом первый вход блока 4 является вторым входом управляемой линии задержки 17, второй и третий входы блока 4 являются соответственно вторым и первым входами видеоусилителя 15, а выход блока 4 является выходом управляемой линии 17 задержки.
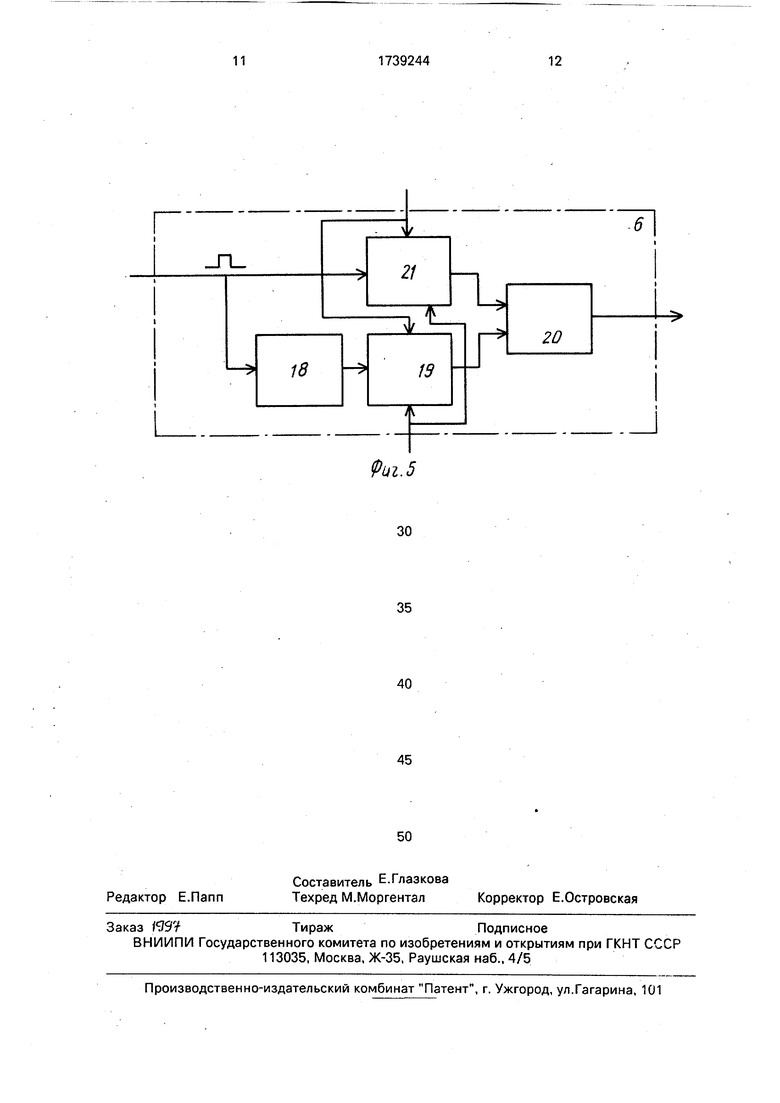
Схема блока 6 управляемого вычитания сигналов (фиг.5) содержит последовательно соединенные элемент НЕ 18, ключ 19 и дифференциальный усилитель 20, а также ключ 21, выход которого подключен к второму входу усилителя 20. При этом первый вход блока 6 соединен с вторым входом ключа 21 и третьим входом ключа 19, второй вход блока б соединен с вторым входом ключа 19 и третьим входом ключа 21, третий вход блока 6 является первым входом ключа 21, который соединен с первым входом элемента НЕ 18, а выход дифференциального усилителя 20 является выходом блока 6.
Устройство работает следующим образом.
Датчик 1 изображения (фиг.1) периодически опрашивается тактовым генератором 5 по сигналам с его первого выхода. Каждый цикл измерения состоит из времени накопления Тн (фиг.2а) и времени вывода информации Тв.
В течение времени Тн первого, третьего, пятого и т.д. циклов измерения (фиг.2б) осветитель 10 выключен, а в течение времени Тн второго, четвертого и т.д. циклов изменения осветитель 10 включен. В течение времени Тв на выходе датчика 1 периодически формируется последовательность импульсов, амплитуда которых отражает распределение освещенности в плоскости
линейного ФПЗС датчика 1, на который проецируется изображение объекта 11. Выход датчика 1 соединен с одной стороны через
видеоусилитель 2 и фильтр 3 с первым входом блока 6 управляемого вычитания сигналов, а с другой стороны через блок 4 задержки - с его вторым входом. Видеоусилитель 2 усиливает и преобразует последо0 вательность импульсов с выхода датчика 1 в ступенчатый сигнал, например, с помощью устройства выборки-хранения (не показано), управление которым осуществляется сигналами с второго выхода тактового гене5 ратора 5.
Фильтр 3 формирует видеосигнал, огибающая которого характеризует распределение освещенности изображения в плоскости ФЗПС. Следовательно в течение
0 времени Тв первого, третьего и т.д. циклов измерения (осветитель 10 выключен) на выходе фильтра 3 (фиг.2в) будет видеосигнал, форма огибающей которого определяется интенсивностью фонового излучения нагре5 того объекта (образца), а в течение времени Тв второго, четвертого и т.д. циклов измерения (осветитель 10 включен) на выходе фильтра 3 (фиг.2в) будет видеосигнал, форма огибающей которого определяется суммар0 ным воздействием излучения осветителя 10 и фонового излучения нагретого объекта 11. Блок 4 задержки (фиг.1) осуществляет временную задержку импульсов с выхода датчика 1 на время одного цикла измерения и
5 также формирует видеосигнал (фиг.2г). Таким образом в течение времени Тв второго, четвертого и т.д. циклов (фиг.2в,г) измерения на первом входе блока 6 управляемого вычитания сигналов будет видеосигнал, ус0 ловия формирования которого определены осветителем 10 и излучением нагретого объекта 11, а на его второго входе - видеосигнал, сформированный только за счет излучения нагретого объекта 11. В течение
5 времени Тв третьего, пятого и т.д. циклов измерения (фиг.2 в,г) - наоборот. В блоке 6 управляемого вычитания сигналов по сигналу с четвертого выхода тактового генератора 5 в каждом цикле измерения
0 осуществляется вычитание видеосигнала, полученного за счет фонового излучения объекта 11, из видеосигнала, полученного за счет излучений осветителя 10 и нагретого объекта 11.
5 Таким образом, практически полностью исключается влияние фонового излучения на форму огибающей видеосигнала (фиг.2д). Видеосигнал с выхода блока б поступает на второй вход компаратора 8, на первый вход которого подается опорное напряжение с выхода источника 7 опорного напряжения.
Сформированный компаратором 8 видеоимпульс (фиг.2е) поступает на первый вход счетчика 9, на второй вход которого подаются заполняющие импульсы с пятого выхода тактового генератора 5. С выхода счетчика 6 код, пропорциональный размеру объекта 11, поступает на выход устройства.
Блок 4 задержки (фиг.З) может быть выполнен на линейном ФПЗС 12, светочувствительные элементы которого затенены. В этом случае импульсы с выхода датчика 1 изображения в течение времени Тв, например, первого цикла измерения поступают на второй вход ФПЗС 12, на первый вход которого поступают управляющие сигналы с первого выхода тактового генератора 5. В ячейки ФПЗС 12 заносятся заряды, распределение величины которых пропорционально амплитудам последовательности импульсов с выхода датчика 1. В течение времени Тв следующего второго цикла эти заряды преобразуются в последовательность импульсов и выводятся с ФПЗС 12 синхронно с выводом импульсов с выхода датчика 1.
Одновременно в ячейки линейного ФПЗС 12 при этом заносятся заряды, величина которых пропорциональная амплитудам импульсов, поступающих с выхода датчика 1 в течение времени Тв второго цикла измерения.
Таким образом, задержка импульсов с датчика 1 всегда будет равна времени одного цикла измерения, т.е. Т3 Тн + Тв.
Видеоусилитель 13 усиливает выходные импульсы ФПЗС 12 и преобразует их в ступенчатый сигнал с помощью., например, устройства выборки-хранения, управление которым осуществляется сигналами с второго выхода тактового генератора 5, поступающими на второй вход видеоусилителя 13. С помощью фильтра 14 формируется огибающая видеосигнала, которая поступает на выход блока 4.
Блок 4 задержки может быть реализован и с помощью управляемой линии задержки (фиг.4). В этом случае импульсы с датчика 1 поступают на второй вход видеоусилителя 15, где они усиливаются и преобразуются в ступенчатый сигнал, например, с помощью устройства выборки-хранения, управляемого по сигналам с второго выхода тактового генератора 5, поступающим на первый вход видеоусилителя 15. Фильтр 16 формирует огибающую видеосигнала, который через направляемую линию задержки 16 поступает на выход блока 4. Время задержки линии 17 связано с временем цикла измерения Т3 Тн + Тв датчика 1 и при его изменении изменяется по сигналу, поступающему на второй вход управляемой линии 17 задержки с первого выхода тактового генератора 5.
Блок 6 управляемого вычитания сигналов (фиг.5) работает следующим образом. Управляющий сигнал с четвертого выхода тактового генератора 5 поступает на первый вход ключа 21 непосредственно, а на первый вход ключа 19-через элемент НЕ 18. В
течение времени Тв, например, нечетного цикла измерения на выход ключа 21 проходит сигнал с третьего входа ключа, являющегося вторым входом блока б, а на выход ключа 19 в это время поступает сигнал с
третьего входа, являющегося первым вхо- дом блока 6. В течение времени Тв четного цикла измерения - наоборот. Следовательно, на второй вход дифференциального усилителя 20 в каждом цикле измерения
поступает суммарный видеосигнал, сформированный датчиком 1 (фиг.1) при включенном осветителе 10 и фоновом излучении объекта 11, а на его первый вход - фоновый видеосигнал. В дифференциальном усилителе 20 (фиг.5) осуществляется вычитание сигнала, поступающего на его первый вход, из сигнала, поступающего на его второй вход. Разностный сигнал, форма огибающей которою не зависит от фонового излучения
объекта 11, поступает на выход блока 6.
Формула изобретения
Устройство для автоматического контроля геометрических размеров объекта, содержащее последовательно соединенные датчик изображения на приборе с зарядовой связью, видеоусилитель, фильтр и тактовый генератор, первый вход которого
соединен с входом датчика изображения, а второй выход - с вторым входом видеоусилителя, и последовательно соединенные источник опорного напряжения, компаратор и счетчик, отличающееся тем, что, с
целью повышения достоверности результатов измерений, за счет исключения погрешностей от влияния фонового излучения на форму огибающей видеосигнала с выхода датчика изображения, оно снабжено осветителем, блоком задержки и блоком управляемого вычитания сигналов, первый и второй входы которого соединены соответственно с выходами фильтра и блока задержки, а выход подключен к второму входу
компаратора, первый и вторбй входы блока задержки сигнала соединены соответственно с первым и вторым выходами тактового генератора, к третьему выходу которого подключен осветитель, четвертый выход тактового генератора подключен к третьему
входу блока управляемого вычитания, пя- датчика изображения соединен с третьим тый - к второму входу счетчика, а выход входом блока задержки.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКТИВНО-ИМПУЛЬСНЫЙ ТЕЛЕВИЗИОННЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 2014 |
|
RU2589947C1 |
| Устройство цифрового преобразования видеосигнала | 1989 |
|
SU1660210A1 |
| Многоканальный спектрометр | 1988 |
|
SU1627865A1 |
| АКТИВНО-ИМПУЛЬСНЫЙ ТЕЛЕВИЗИОННЫЙ ПРИБОР НОЧНОГО ВИДЕНИЯ | 2016 |
|
RU2645122C2 |
| Устройство для считывания изображений | 1988 |
|
SU1645979A1 |
| ОПТИЧЕСКИЙ ПРОГИБОМЕР | 1995 |
|
RU2095755C1 |
| Устройство для автоматической регулировки режима передающей телевизионной трубки | 1986 |
|
SU1350846A1 |
| Способ измерения угла вращения плоскости колебаний поляризованного излучения | 1989 |
|
SU1744462A1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КОМПЛЕКС ДЛЯ ВЕДЕНИЯ ВОЗДУШНОЙ РАДИАЦИОННОЙ РАЗВЕДКИ МЕСТНОСТИ ДИСТАНЦИОННЫМ МЕТОДОМ | 2010 |
|
RU2489804C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ | 1994 |
|
RU2096927C1 |
Изобретение относится к измерительной технике. Целью изобретения является повышение достоверности результатов измерения. Устройство содержит последовательно соединенные датчик 1 на приборе с зарядовой связью, видеоусилитель 2, фильтр 3, блок 4 задержки, тактовый генераЮ 11 тор 5, блок 6 управляемого вычитания сигналов, источник 7 опорного напряжения, компаратор 8, счетчик 9, осветитель 10, освещающий исследуемый объект 11. Датчик 1 изображения периодически опрашивается генератором 5. В течение первого, третьего и т.д. циклов измерения осветитель 10 выключен, а в течение второго, четвертого и т.д. циклов измерения включен. В блоке 6 управляемого вычитания сигналов осуществляется вычитание видеосигнала, полученного за счет фонового излучения объекта 11 при выключенном осветителе 10, из видеосигнала, полученного при включенном осветителе 10 и фоновом излучении объекта 11. Один из сигналов задержан на время одного цикла измерения при прохождении через блок 4 задержки. На выходе блока 6 из огибающей видеосигнала практически полностью исключена фоновая составляющая и он поступает через компаратор 8 на первый вход счетчика 9, на второй вход которого поступают заполняющие импульсы с пятого выхода тактового генератора 5. 5 ил. СО с VI CJ чэ ю N N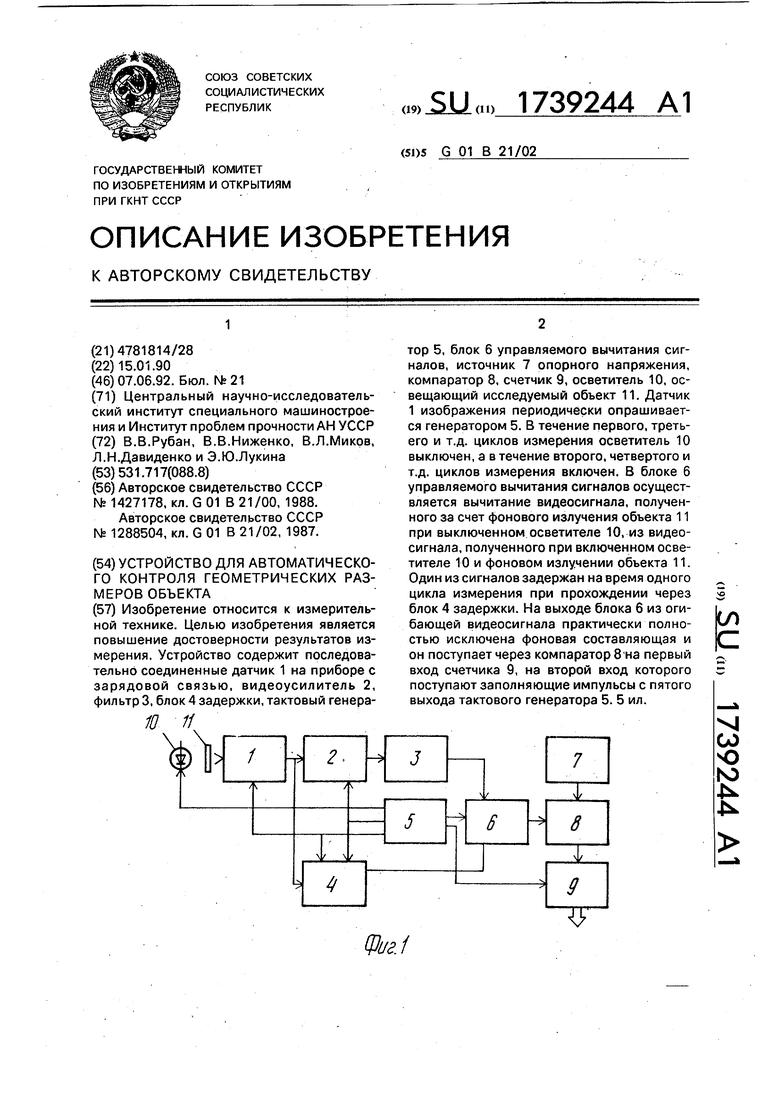
ЕТ
15
L.
Риг.З
16
17
-
.
Фиг.ЧРиг.5
| Оптико-электронное устройство | 1986 |
|
SU1427178A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство автоматического контроля геометрических размеров объектов | 1985 |
|
SU1288504A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
