Изобретение относится к измерительной технике, в частности к устройствам для измерения вязкости жидкостей, и может быть использовано в химической, нефтехимической, машиностроительной и других отраслях промышленности.
Цель изобретения - упрощение конструкции и разработка способа регулировки данного вискозиметра.
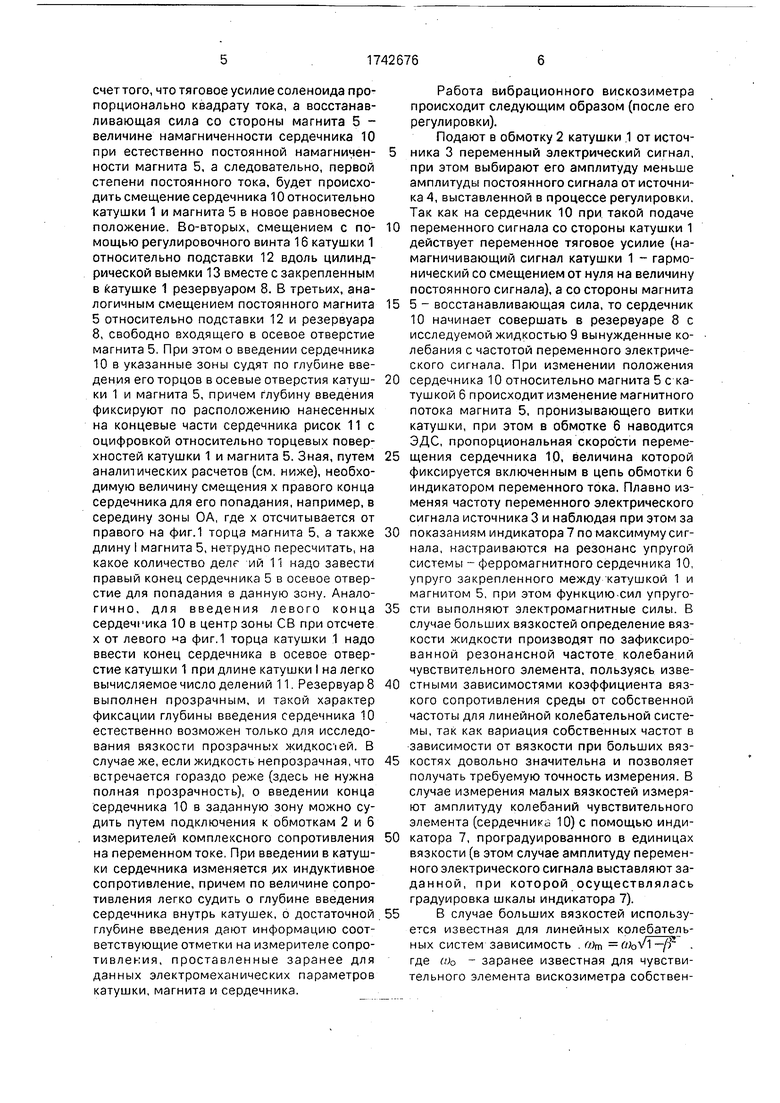
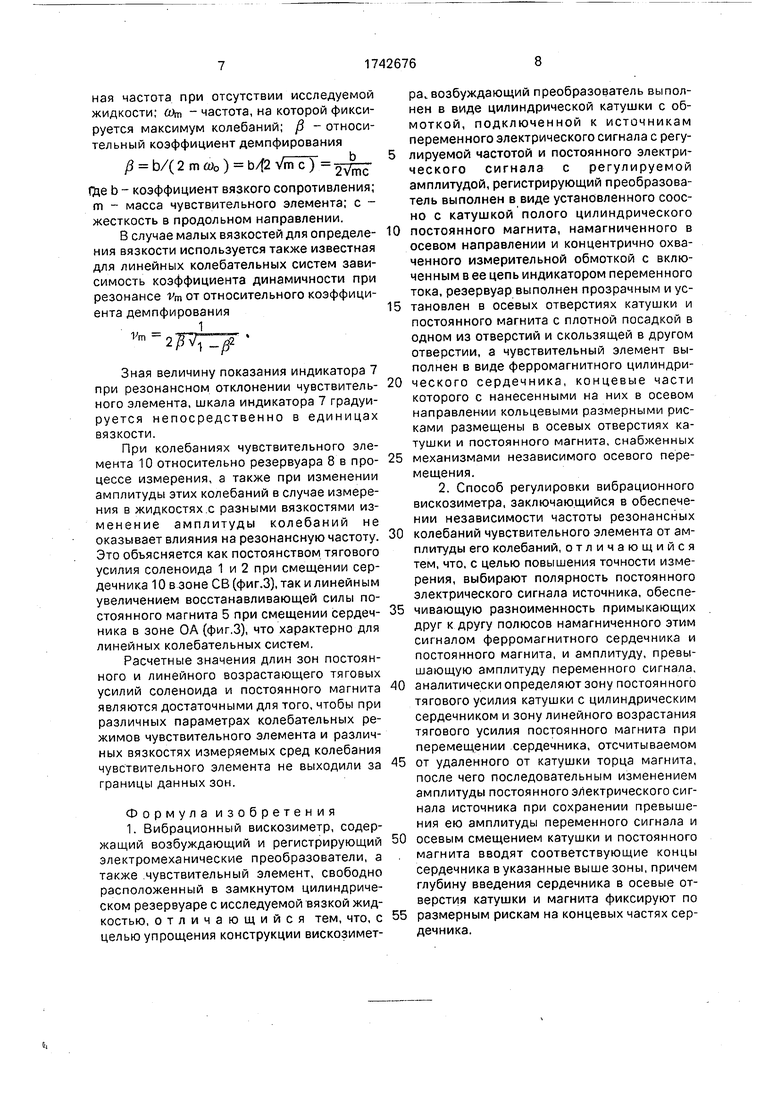
На фиг,1 схематично изображен предлагаемый вибрационный вискозиметр с поперечным центральным разрезом; на фиг.2 - разрез А-А на фиг. на фиг.З - расчетная зависимость изменения тягового усилия соленоида (постоянного магнита) при смещении сердечника с указанием зон постоянного и линейно возрастающего тягового усилия.
Вибрационный вискозиметр содержит возбуждающий электромеханический преобразователь, выполненный в виде цилиндрической катушки 1 с обмоткой 2, подключенной к источнику 3 переменного электрического сигнала с регулируемой частотой и источнику 4 постоянного электрического сигнала с регулируемой амплитудой, регистрирующий электромеханический преобразователь, выполненный в виде установленного соосно с катушкой 1 полого цилиндрического постоянного магнита 5, намагниченного в осевом направлении и концентрично охваченного измерительной обмоткой 6 с включенным в ее цепь индикатором 7 переменного тока, проградуированного в единицах вязкости, замкнутый цилиндрический резервуар 8 с исследуемой вязкой жидкостью 9, выполненный прозрачным и установленный в осевых отверстиях катушки 1 и постоянного магнита 5 с плотной посадкой в отверстии катушки 1 и скользящей посадкой в отверстии магнита 5, а также чувствительный элемент, свободно расположенный в резервуаре 8 и выполненный в виде ферромагнитного цилиндрического сердечника 10, концевые части которого с нанесенными на них в осевом направлении кольцевыми размерными рисками 11 с оцифровкой размещены в осевых отверстиях катушки 1 и постоянного магнита 5. При этом катушка 1 и постоянный магнит 5 снабжены механизмами независимого осевого перемещения, выполненными в виде подставки 12 с цилиндрической выемкой 13 для перемещения ка- тушки 1 и магнита 5, продольных направляющих пазов 14 в подставке 12 для перемещения фиксаторов 15, закрепленных на торцах катушки 1 и постоянного магнита 5, и регулировочных винтов 16, свободно установленных с ограничением осевого перемещения в прикрепленных к подставке 12 стойках 17 и ввернутых в прикрепленные к фиксаторам 15 втулки 18.
Регулировку вибрационного вискозиметра осуществляют следующим образом.
Предварительно выбирают полярность постоянного электрического сигнала, подазаемого от источника 4 сигнала в обмотку 2 такой, чтобы обеспечивалась разноимен- ность примыкающих один к другому полюсов намагниченного этим сигналом ферромагнитного сердечника 10 и постоянного магнита 5. Такая полярность обеспечивает при втягивании сердечника 10 в катушку 1 действие на противоположный конец сердечника 10 восстанавливающей силы со стороны постоянного магнита 5, что
обусловлено разноименностью обращенных друг к другу полюсов. Амплитуду постоянного электрического сигнала от источника 4 выбирают большей, чем амплитуда переменного сигнала, подаваемого в ту же обмотку 2 от источника 3 переменного сигнала с регулируемой частотой. Такое превышение позволяет одновременно с возбуждением вынужденных колебаний сердечника 10 переменным сигналом все время сохранять
выбранную полярность намагничивания сердечника 10 по отношению к постоянному магниту 5 и за счет этого поддерживать во все время работы действие на сердечник 10 восстанавливающей силы со стороны магнита 5. Далее, имея расчетные зависимости изменения тяговых усилий F соленоида 1 и 2 и постоянного магнита 5 при смещении сердечника 10, характер которых принципиально аналогичен и показан на фиг.З, аналитически определяют зону постоянного тягового усилия F катушки 1 с сердечником 10 (зону СВ на фиг.З) и зону линейного возрастания тягового усилия постоянного магнита 5 с сердечником 10 при перемещении
сердечника, отсчитываемом от удаленного от катушки 2 торца магнита 5 (торца 00 на фиг.З, а зона ОА на этой же фиг.З). Далее вводят соответствующие концы сердечника 10 в указанные выше зоны, а именно левый
на фиг,1 конец сердечника 10 вводят в зону СВ постоянного тягового усилия соленоида
1и 2, а правый на фиг.1 конец сердечника 10 вводят в зону ОА линейно возрастающего тягового усилия магнита 5. Изменение положения сердечника 10 относительно катушки
2и магнита 5 производят путем независимой и последовательной регулировки трех параметров. Во-первых, изменением амплитуды постоянного сигнала источника 4, подаваемого в обмотку 2, при котором за
счет того, что тяговое усилие соленоида пропорционально квадрату тока, а восстанавливающая сила со стороны магнита 5 - величине намагниченности сердечника 10 при естественно постоянной намагниченности магнита 5, а следовательно, первой степени постоянного тока, будет происходить смещение сердечника 10 относительно катушки 1 и магнита 5 в новое равновесное положение. Во-вторых, смещением с помощью регулировочного винта 16 катушки 1 относительно подставки 12 вдоль цилиндрической выемки 13 вместе с закрепленным в катушке 1 резервуаром 8. В третьих, аналогичным смещением постоянного магнита 5 относительно подставки 12 и резервуара 8, свободно входящего в осевое отверстие магнита 5. При этом о введении сердечника 10 в указанные зоны судят по глубине введения его торцов в осевые отверстия катушки 1 и магнита 5, причем глубину введения фиксируют по расположению нанесенных на концевые части сердечника рисок 11 с оцифровкой относительно торцевых поверхностей катушки 1 и магнита 5. Зная, путем аналитических расчетов (см. ниже), необходимую величину смещения х правого конца сердечника для его попадания, например, в середину зоны ОА, где х отсчитывается от правого на фиг.1 торца магнита 5, а также длину I магнита 5, нетрудно пересчитать, на какое количество делг ий 11 надо завести правый конец сердечника 5 в осевое отверстие для попадания в данную зону. Аналогично, для введения левого конца сердечника 10 в центр зоны СВ при отсчете х от левого на фиг.1 торца катушки 1 надо ввести конец сердечника в осевое отверстие катушки 1 при длине катушки I на легко вычисляемое число делений 11. Резервуар 8 выполнен прозрачным, и такой характер фиксации глубины введения сердечника 10 естественно возможен только для исследования вязкости прозрачных жидкостей. В случае же, если жидкость непрозрачная, что встречается гораздо реже (здесь не нужна полная прозрачность), о введении конца сердечника 10 в заданную зону можно судить путем подключения к обмоткам 2 и 6 измерителей комплексного сопротивления на переменном токе. При введении в катушки сердечника изменяется ,их индуктивное сопротивление, причем по величине сопротивления легко судить о глубине введения сердечника внутрь кагушек, о достаточной глубине введения дают информацию соответствующие отметки на измерителе сопротивления, проставленные заранее для данных электромеханических параметров катушки, магнита и сердечника.
Работа вибрационного вискозиметра происходит следующим образом (после его регулировки).
Подают в обмотку 2 катушки 1 от источника 3 переменный электрический сигнал, при этом выбирают его амплитуду меньше амплитуды постоянного сигнала от источника 4, выставленной в процессе регулировки. Так как на сердечник 10 при такой подаче
переменного сигнала со стороны катушки 1 действует переменное тяговое усилие (намагничивающий сигнал катушки 1 - гармонический со смещением от нуля на величину постоянного сигнала), а со стороны магнита
5 - восстанавливающая сила, то сердечник 10 начинает совершать в резервуаре 8 с исследуемой жидкостью 9 вынужденные колебания с частотой переменного электрического сигнала. При изменении положения
сердечника 10 относительно магнита 5 с катушкой 6 происходит изменение магнитного потока магнита 5, пронизывающего витки катушки, при этом в обмотке 6 наводится ЭДС, пропорциональная скорости перемещения сердечника 10, величина которой фиксируется включенным в цепь обмотки 6 индикатором переменного тока. Плавно изменяя частоту переменного электрического сигнала источника 3 и наблюдая при этом за
показаниям индикатора 7 по максимуму сигнала, настраиваются на резонанс упругой системы - ферромагнитного сердечника 10, упруго закрепленного между катушкой 1 и магнитом 5, при этом функцию сил упругости выполняют электромагнитные силы. В случае больших вязкостен определение вязкости жидкости производят по зафиксированной резонансной частоте колебаний чувствительного элемента, пользуясь известными зависимостями коэффициента вязкого сопротивления среды от собственной частоты для линейной колебательной системы, так как вариация собственных частот в зависимости от вязкости при больших вязкостях довольно значительна и позволяет получать требуемую точность измерения. В случае измерения малых вязкостей измеряют амплитуду колебаний чувствительного элемента (сердечник 10) с помощью индикатора 7, проградуированного в единицах вязкости (в этом случае амплитуду переменного электрического сигнала выставляют заданной, при которой осуществлялась градуировка шкалы индикатора 7).
В случае больших вязкостей используется известная для линейных колебательных систем зависимость (т . где ah заранее известная для чувствительного элемента вискозиметра собственная частота при отсутствии исследуемой жидкости; (От частота, на которой фиксируется максимум колебаний; /3 - относительный коэффициент демпфирования
y3 b/() b/f2ViT7c7 2
Где b - коэффициент вязкого сопротивления; m - масса чувствительного элемента; с - жесткость в продольном направлении.
В случае малых вязкостей для определения вязкости используется также известная для линейных колебательных систем зависимость коэффициента динамичности при резонансе vm от относительного коэффициента демпфирования
Vm
Зная величину показания индикатора 7 при резонансном отклонении чувствительного элемента, шкала индикатора 7 градуируется непосредственно в единицах вязкости.
При колебаниях чувствительного элемента 10 относительно резервуара 8 в процессе измерения, а также при изменении амплитуды этих колебаний в случае измерения в жидкостях с разными вязкостями изменение амплитуды колебаний не оказывает влияния на резонансную частоту. Это обьясняется как постоянством тягового усилия соленоида 1 и 2 при смещении сердечника 10 в зоне СВ(фиг.З), так и линейным увеличением восстанавливающей силы постоянного магнита 5 при смещении сердечника в зоне ОА (фиг.З), что характерно для линейных колебательных систем.
Расчетные значения длин зон постоянного и линейного возрастающего тяговых усилий соленоида и постоянного магнита являются достаточными для того, чтобы при различных параметрах колебательных режимов чувствительного элемента и различных вязкостях измеряемых сред колебания чувствительного элемента не выходили за границы данных зон.
Формула изобретения 1. Вибрационный вискозиметр, содержащий возбуждающий и регистрирующий электромеханические преобразователи, а также чувствительный элемент, свободно расположенный в замкнутом цилиндрическом резервуаре с исследуемой вязкой жидкостью, отличающийся тем, что, с целью упрощения конструкции вискозиметра,, возбуждающий преобразователь выполнен в виде цилиндрической катушки с обмоткой, подключенной к источникам переменного электрического сигнала с регулируемой частотой и постоянного электрического сигнала с регулируемой амплитудой, регистрирующий преобразователь выполнен в виде установленного соос- но с катушкой полого цилиндрического
постоянного магнита, намагниченного в осевом направлении и концентрично охваченного измерительной обмоткой с включенным в ее цепь индикатором переменного тока, резервуар выполнен прозрачным и установлен в осевых отверстиях катушки и постоянного магнита с плотной посадкой в одном из отверстий и скользящей в другом отверстии, а чувствительный элемент выполнен в виде ферромагнитного цилиндрического сердечника, концевые части которого с нанесенными на них в осевом направлении кольцевыми размерными рисками размещены в осевых отверстиях катушки и постоянного магнита, снабженных
механизмами независимого осевого перемещения,
2. Способ регулировки вибрационного вискозиметра, заключающийся в обеспечении независимости частоты резонансных
колебаний чувствительного элемента от амплитуды его колебаний, отличающийся тем, что, с целью повышения точности измерения, выбирают полярность постоянного электрического сигнала источника, обеспечивающую разноименность примыкающих друг к другу полюсов намагниченного этим сигналом ферромагнитного сердечника и постоянного магнита, и амплитуду, превышающую амплитуду переменного сигнала,
аналитически определяют зону постоянного тягового усилия катушки с цилиндрическим сердечником и зону линейного возрастания тягового усилия постоянного магнита при перемещении сердечника, отсчитываемом
от удаленного от катушки торца магнита, после чего последовательным изменением амплитуды постоянного электрического сигнала источника при сохранении превышения ею амплитуды переменного сигнала и
осевым смещением катушки и постоянного магнита вводят соответствующие концы сердечника в указанные выше зоны, причем глубину введения сердечника в осевые отверстия катушки и магнита фиксируют по
размерным рискам на концевых частях сердечника.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОСТРИКЦИОННЫЙ ПРЕОБРАЗОВАТЕЛЬ | 1993 |
|
RU2046030C1 |
| Вискозиметр | 1989 |
|
SU1693461A1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ МАГНИТОСТРИКЦИОННЫМ УРОВНЕМЕРОМ И МАГНИТОСТРИКЦИОННЫЙ УРОВНЕМЕР | 2003 |
|
RU2222786C1 |
| КОЛЕБАТЕЛЬНЫЙ СДВИГОМЕТР | 2011 |
|
RU2454655C1 |
| Способ измерения жесткости подшипника и устройство для его осуществления | 1991 |
|
SU1776347A3 |
| Способ контроля механических свойств металлопроката, изготовленного из ферромагнитных металлических сплавов и устройство для его осуществления | 2023 |
|
RU2807964C1 |
| Колебательный вискозиметр | 1978 |
|
SU811105A1 |
| ЭЛЕКТРОМАГНИТНЫЕ АКУСТИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ | 2003 |
|
RU2298786C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕНИ СВЕРТЫВАНИЯ КРОВИ | 1992 |
|
RU2070327C1 |
| ЭЛЕКТРОМАГНИТНО-АКУСТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2009 |
|
RU2390014C1 |
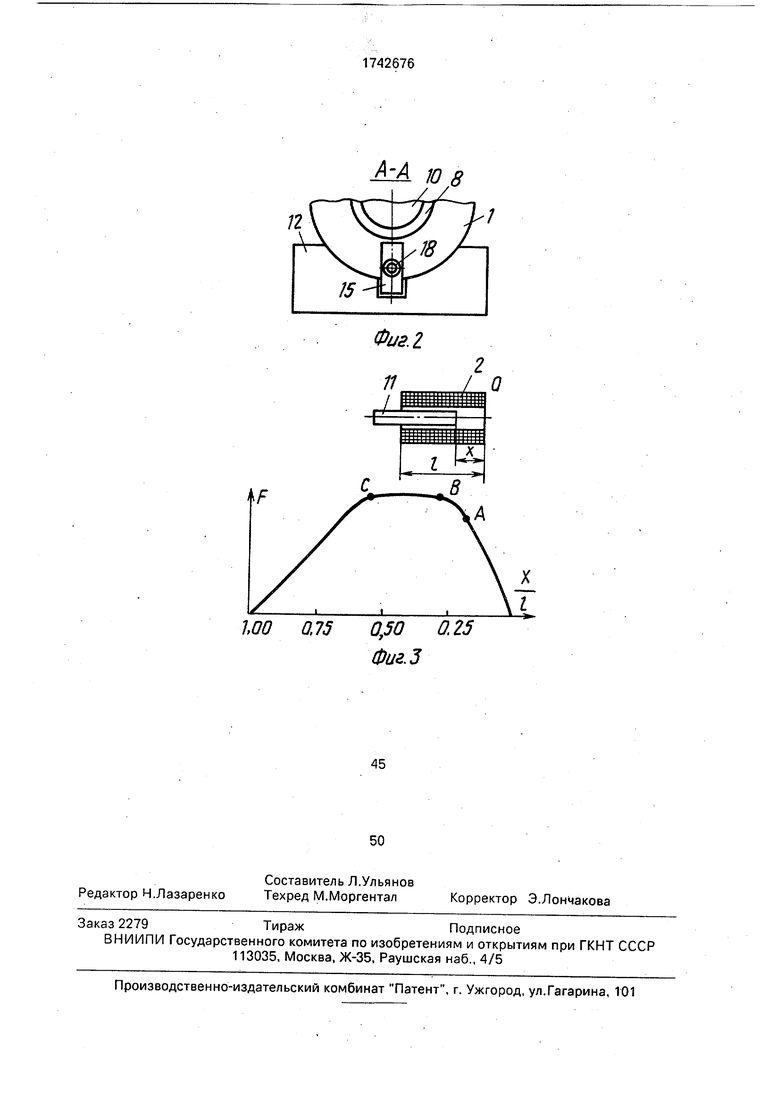
Изобретение относится к устройствам для измерения вязкости жидкости вибрационным способом и позволяет упростить конструкцию зискозиметра и повысить точность измерений за счет исключения нелинейности. Вискозиметр состоит из возбуждающего преобразователя в виде катушки 1 с обмоткой 2, подключенной к J I -Н 18 15 14 П 13 источникам 3 и 4 переменного и постоянного электрического сигналов, регистрирующего преобразователя в виде полого цилиндрического постоянного магнита 5, концентрично охваченного измерительной обмоткой 6 с включенным в ее цепь индикатором 7 переменного электрического тока, замкнутый резервуар 8 с исследуемой вязкой жидкостью 9, а также чувствительный элемент в виде свободно размещенного в резервуаре ферромагнитного сердечника 10. Способ регулировки вискозиметра заключается в том, что выбирают заданную полярность источника постоянного электрического сигнала и амплитуду, превышающуюамплитудупеременного электрического сигнала, аналитически определяют зону постоянного тягового усилия катушки 1 и зону линейного возрастания тягового усилия магнита 5, после чего осевым смещением катушки 1 и магнита 5 с помощью специального механизма осевого перемещения вводят концы сердечника 10 в указанные зоны 2 с.п. ф-лы, 3 ил. сл VI о VI Фиг.1 Н 15181617
WO 0,73 0,50 0.25 Фиг.З
Фиг. 2.
| Колебательный вискозиметр | 1982 |
|
SU1065738A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ измерения вязкости жидкостей колебательными вискозиметрами | 1984 |
|
SU1245949A1 |
| Способ измерения вязкости | 1979 |
|
SU857787A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вибрационный вискозиметр | 1976 |
|
SU714238A1 |
