со
С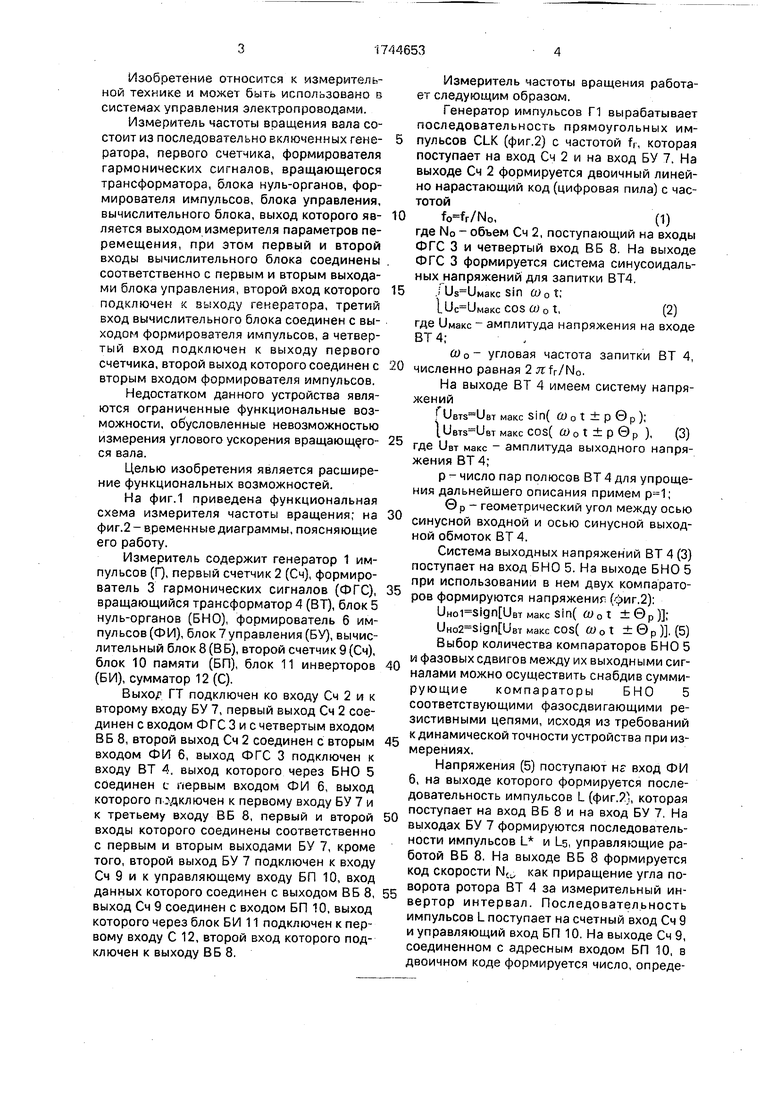
| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель частоты вращения вала | 1989 |
|
SU1673983A1 |
| Измеритель параметров перемещения | 1989 |
|
SU1691756A1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ СДВИГА ФАЗ ГАРМОНИЧЕСКИХ СИГНАЛОВ | 2020 |
|
RU2751020C1 |
| МНОГОКАНАЛЬНАЯ ЦИФРОВАЯ СИСТЕМА ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ | 1990 |
|
RU2013012C1 |
| Стробоскопический цифровой преобразователь | 1987 |
|
SU1503017A1 |
| Устройство для защиты синхронного электродвигателя от асинхронного режима | 1986 |
|
SU1431002A2 |
| Микропрограммное устройство управления | 1983 |
|
SU1179337A1 |
| МОБИЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ КУЩЕНКО В.А. | 2010 |
|
RU2435226C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИСТОЧНИКАМИ ОСВЕЩЕНИЯ | 2006 |
|
RU2323552C1 |
| Синтезатор частот | 1984 |
|
SU1218464A1 |
Использование: системы управления электроприводами. Сущность изобретения: измеритель содержит генератор 1 импульсов, счетчики 2 и 9, формирователь 3 гармонических сигналов, вращающийся трансформатор 4, блок 5 нуль-органов, формирователь 6 импульсов, блок 7 управления, вычислительный блок 8, блок 10 памяти, блок инверторов 11, сумматор 12. 2 ил.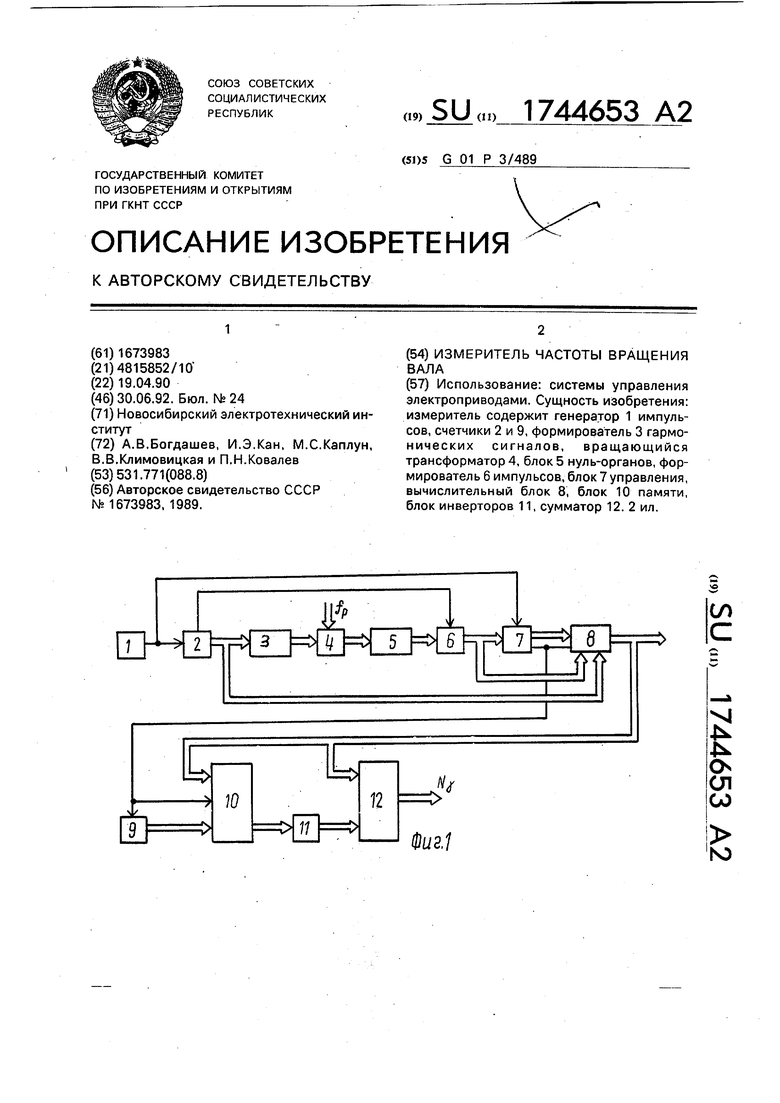
К
15
ю
11
м
HJ
Фиг.1
vj а
(Л CJ
ю
Изобретение относится к измерительной технике и может быть использовано в системах управления электропроводами.
Измеритель частоты воащения вала состоит из последовательно включенных гене- ратора, первого счетчика, формирователя гармонических сигналов, вращающегося трансформатора, блока нуль-органов, формирователя импульсов, блока управления, вычислительного блока, выход которого яв- ляется выходом измерителя параметров перемещения, при этом первый и второй входы вычислительного блока соединены соответственно с первым и вторым выходами блока управления, второй вход которого подключен к выходу генератора, третий вход вычислительного блока соединен с выходом формирователя импульсов, а четвертый вход подключен к выходу первого счетчика, второй выход которого соединен с вторым входом формирователя импульсов.
Недостатком данного устройства являются ограниченные функциональные возможности, обусловленные невозможностью измерения углового ускорения вращающего- ся вала.
Целью изобретения является расширение функциональных возможностей.
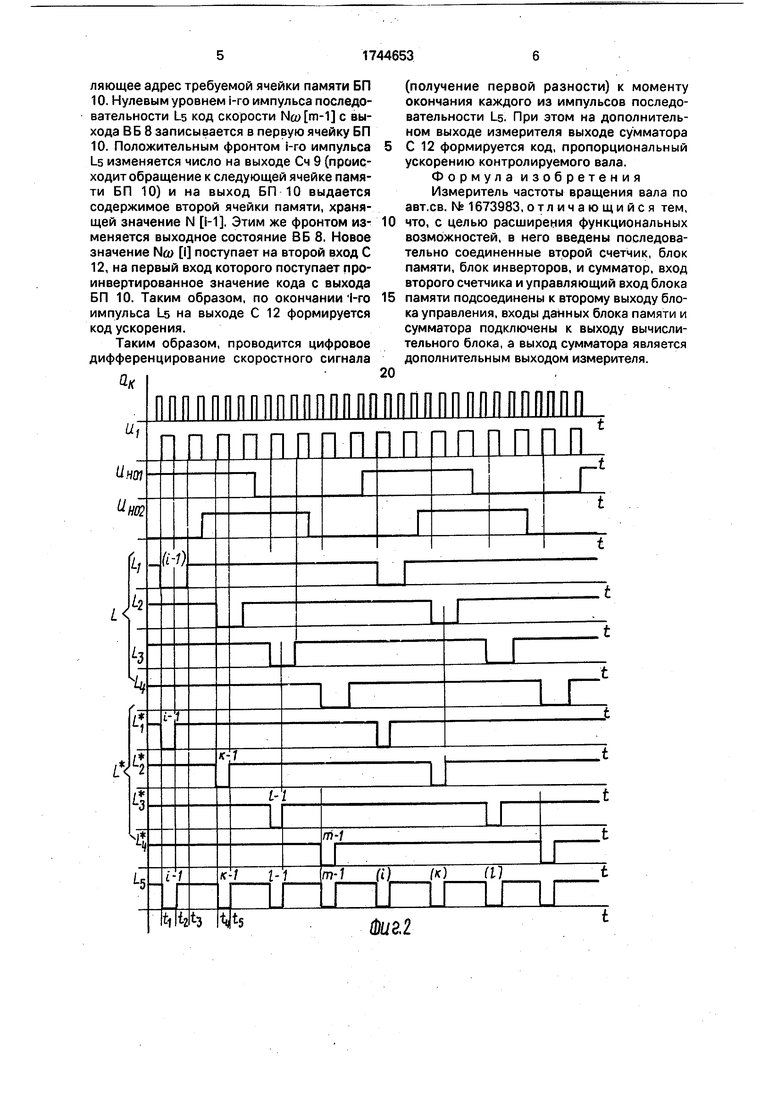
На фиг.1 приведена функциональная схема измерителя частоты вращения; на фиг.2-временные диаграммы, поясняющие его работу.
Измеритель содержит генератор 1 импульсов (Г), первый счетчик 2 (Сч), формирователь 3 гармонических сигналов (ФГС), вращающийся трансформатор 4 (ВТ), блок 5 нуль-органов (БНО), формирователь б импульсов (ФИ), блок 7управления (БУ), вычислительный блок 8 (ВБ), второй счетчик 9 (Сч), блок 10 памяти (БП), блок 11 инверторов (БИ), сумматор 12 (С).
Выхо/1 ГТ подключен ко входу Сч 2 и к второму входу БУ 7, первый выход Сч 2 соединен с входом ФГС 3 и с четвертым входом В Б 8, второй выход Сч 2 соединен с вторым входом ФИ 6, выход ФГС 3 подключен к входу ВТ 4, выход которого через БНО 5 соединен с первым входом ФИ 6, выход которого п эдключен к первому входу БУ 7 и к третьему входу В Б 8, первый и второй входы которого соединены соответственно с первым и вторым выходами БУ 7, кроме того, второй выход БУ 7 подключен к входу Сч 9 и к управляющему входу БП 10, вход данных которого соединен с выходом ВБ 8, выход Сч 9 соединен с входом БП 10, выход которого через блок БИ 11 подключен к первому входу С 12, второй вход которого подключен к выходу В Б 8.
Измеритель частоты вращения работает следующим образом.
Генератор импульсов П вырабатывает последовательность прямоугольных импульсов CLK (фиг.2) с частотой fr, которая поступает на вход Сч 2 и на вход БУ 7. На выходе Сч 2 формируется двоичный линейно нарастающий код (цифровая пила) с частотой
fo-fr/No,(1)
где No - объем Сч 2, поступающий на входы ФГС 3 и четвертый вход В Б 8. На выходе ФГС 3 формируется система синусоидальных напряжений для запитки ВТ4.
Us UMaKC Sin СО о t;
lUc UMaKcCOSa ot,(2)
где Кмакс - амплитуда напряжения на входе ВТ 4;
Ш0- угловая частота запитки ВТ 4, численно равная 2 jrfr/N0.
На выходе ВТ 4 имеем систему напряжений
UBTS UBT макс Sin( Ш 0 t ± р 0 р );
макс COS( СО о t ± р 0 р ), (3) где DBT макс - амплитуда выходного напряжения ВТ 4;
р - число пар полюсов ВТ 4 для упрощения дальнейшего описания примем
0р - геометрический угол между осью синусной входной и осью синусной выходной обмоток ВТ 4.
Система выходных напряжений ВТ 4 (3) поступает на вход БНО 5. На выходе БНО 5 при использовании в нем двух компараторов формируются напряжениг (фиг.2):
макс sin( t ±0Р);
макс C0s( Ш о t ± 0p ). (5)
Выбор количества компараторов БНО 5 и фазовых сдвигов между их выходными сигналами можно осуществить снабдив суммирующие компараторы БНО 5 соответствующими фазосдвигающими ре- зистивными цепями, исходя из требований к динамической точности устройства при измерениях.
Напряжения (5) поступают нг вход ФИ 6, на выходе которого формируется последовательность импульсов L (фиг.), которая поступает на вход ВБ 8 и на вход БУ 7. На выходах БУ 7 формируются последовательности импульсов L и LS, управляющие работой В Б 8. На выходе ВБ 8 формируется код скорости ГМ,, как приращение угла поворота ротора ВТ 4 за измерительный инвертор интервал. Последовательность импульсов L поступает на счетный вход Сч 9 и управляющий вход БП 10. На выходе Сч 9, соединенном с адресным входом БП 10, в двоичном коде формируется число, определяющее адрес требуемой ячейки памяти БП 10. Нулевым уровнем i-ro импульса последовательности LS код скорости с выхода ВБ 8 записывается в первую ячейку БП 10. Положительным фронтом i-ro импульса LS изменяется число на выходе Сч 9 (происходит обращение к следующей ячейке памяти БП 10) и на выход БП 10 выдается содержимое второй ячейки памяти, хранящей значение N И. Этим же фронтом изменяется выходное состояние В Б 8. Новое значение Мо I поступает на второй вход С 12, на первый вход которого поступает про- инвертированное значение кода с выхода БП 10. Таким образом, по окончании 1-го импульса LS на выходе С 12 формируется код ускорения.
Таким образом, проводится цифровое дифференцирование скоростного сигнала
0
(получение первой разности) к моменту окончания каждого из импульсов последовательности LS. При этом на дополнительном выходе измерителя выходе сумматора С 12 формируется код, пропорциональный ускорению контролируемого вала. Формула изобретения Измеритель частоты вращения вала по авт.св. №1673983,отличающийся тем, что, с целью расширения функциональных возможностей, в него введены последовательно соединенные второй счетчик, блок памяти, блок инверторов, и сумматор, вход второго счетчика и управляющий вход блока памяти подсоединены к второму выходу блока управления, входы данных блока памяти и сумматора подключены к выходу вычислительного блока, а выход сумматора является дополнительным выходом измерителя.
| Измеритель частоты вращения вала | 1989 |
|
SU1673983A1 |
