Изобретение относится к транспортным судоходным гидротехническим сооружениям, в частности к устройствам автоматического управления судоходными шлюзами.
Известно устройство автоматического управления шлюзом, содержащее датчики подхода, входа и выхода судов, датчики положений рабочих органов и уровня воды в камере шлюзования, датчик готовности суд- № к шлюзованию, при этом датчики подхода и входа судов соединены со счетчиками подхода и входа судов соответственно, и блок управления, входы которого соединены с выходами датчиков выхода судов, положений рабочих органов, уровня воды в камере шлюза, готовности судна к шлюзованию и с выходами счетчиков подхода и входа судов.
Однако данное устройство не может быть использовано на шлюзах -иной конструкции, например на шлюзах с подъемно- опускными воротами и наполнением из-под ворот, на шлюзах с полноповоротными воротами и т.д. Кроме того, отсутствуют возможности управления шлюзами, оборудованными более чем двумя светофорами, возможность установки рабочих органов шлюза в исходное состояние при длительных перерывах и шлюзованиях.
Наиболее близким по технической сущности является устройство, содержащее датчики подхода, входа и выхода судов, датчик положений рабочих органов и датчик уровня воды в камере шлюза, счетчики подхода и входа судов, соединенные с соответствующими датчиками, и блок управления, входы которого соединены с выходами датчиков выхода судов, положений рабочих орXI
Ь. СП
ioo сь
ганов, уровня воды в камере шлюза, готовности судна к шлюзованию и с выходами счетчиков подхода и входа судов, датчики прохода промежуточных светофоров, блок настройки и набор логических блоков уп- равления затворами водопроводных галерей, двустворчатыми воротами, подъемно-опускными воротами и светофорами, причем блок управления включает логическую схему управления операциями шлюзования и логическую схему управления переключением светофоров, при этом выходы датчиков входа судов соединены с входами счетчиков подхода судов, выходы датчиков выхода судов соединены с входа- ми счетчиков входа судов, входы логической схемы управления переключателем светофоров соединены с выходами датчиков прохода промежуточных светофоров, положений рабочих органов, выхода судов, счетчиков подхода и входа судов и с выходами блока настройки, входы логической схемы управления операциями шлюзования соединены с выходами датчиков уровня воды в камере шлюза и готовности судна к шлюзованию, положений рабочих органов, а также с выходами логической схемы управления переключением светофоров и блока настройки, входы логических блоков управления затворами водопроводных га- лерей, двустворчатыми и подъемно-опускными воротами соединены с выходами датчиков положений рабочих органов и уровня воды в камере шлюза, логической схемы управления операциями шлюзова- ния и блока настройки, а входы логического блока управления светофорами соединены с выходами датчиков положений рабочих органов, уровня воды в камере шлюза, выходами логической схемы управления пере- ключением светофоров и блока настройки.
Недостатком данного устройства является ограниченная функциональная надеж- ность, обусловленная тем, что при выработке команд управления процессом судопропуска не учитывается информация о состоянии электроприводов, используемых для перемещения затворов галерей, ворот и т.п. и о их включении в соответствующие моменты времени в нужном направлении (прямой ход или реьчрс); о соответствии между процессом судопропуска и последовательностью выдачи командных сигналов для управления электроприводами (ЭП).
Отсутствие данной информации может привести к аварийным ситуациям, что может повлечь большие человеческие и материальные потери.
Другим недостатком известного устройства является отсутствие блока контроля.
Отсутствие блока контроля, выполненного, например, в виде мнемосхемы, не позволяет сократить время обнаружения неисправности или отказа, тем самым снижает коэффициент готовности Кг. Необходимо отметить, что снижение величины Кг приводит к снижению функциональной надежности.
Цель изобретения - повышение функциональной надежности устройства (повышения достоверности выработки сигналов управления) путем контроля последовательностью включения ЭП в соответствии с технологическим процессом судопропуска; контроля состояния ЭП (работоспособен или неработоспособен) и включения их в соответствующем направлении вращения в нужные (требуемые) моменты времени; деления командных сигналов управления механизмами на два множества (разрешенных и запрещенных) в соответствии с ходом технологического процесса судопропуска, индикации нештатных ситуаций в технологическом процессе судопропуска, что позволяет повысить коэффициент готовности, уменьшить затраты времени на выявление (поиск) конкретной неисправности
Указанная цель достигается тем, что в устройство автоматического управления судоходным однокамерным шлюзом, содержащим датчики подхода судов и прохода промежуточных светофоров, соединенных соответственно с суммирующим и вычитающим входами реверсивного счетчика подхода судов, датчик входа судов, соединенный с вычитающим входом реверсивного счетчика входа судов, суммирующий вход которого связан с выходом датчика прохода промежуточных светофоров, датчики готовности судна к шлюзованию, выхода судов, уровня воды в камере шлюза, выход которого соединен с первым входом блока контроля положения судов, к второму и третьему входам которого подключены соответственно выходы занятности и обнуления реверсивных счетчиков подхода и входа судов, первый выход блока контроля положения судов подключен к первому входу логического блока управления светофорами, второй выход - к первому входу логического блока управляющих сигналов, первый и второй выходы которого соединены соответственно с входами логических блоков управления затворами галерей и воротами, с вторым входом логического блока управления светофорами соединен первый выход датчика положения рабочих органов, дополнительно введены датчик состояния приводных механизмов, блок диагностики, первый и второй блоки контроля состояний, теверсивные счетчики судов, готовых к
10
шлюзованию, и выхода судов, при этом к суммирующему и вычитающему входу реверсивного счетчика судов, готовых к шлюзованию, подключены датчики входа судов и датчик готовности судна к шлюзованию, а его выход обнуления соединен с четвертым входом блока контроля положения судов, пятый вход которого связан с выходом обнуления реверсивного счетчика выхода судов, суммирующий и вычитающий входы которого соединены соответственно с датчиками готовности судна шлюзованию и выхода судов, первый вход первого блока контроля состояний соединен с выходом занятости реверсивного счетчика подхода судов, второй вход - с первым выходом датчика положения рабочих органов, а выход - с вторым входом логического блока управляющих сигналов, третий вход которого соединен с выходом второго блока контроля состояний, а третий выход - с входом блока диагностики, первый вход второго блока контроля состояний соединен с выходом занятости реверсивного счетчика подхода судов, второй вход - с датчиком состояния приводных механизмов, а второй выход датчика положения рабочих органов соединен с третьим входом логического блока управления светофорами.
Сущность изобретению заключается в том, что логический блок управляющих сигналов формирует управляющие воздействия на исполнительные механизмы шлюза только при совпадении соответствующих сигналов логических блоков контроля поло- 35 жения судов, рабочих органов и состояния привода, которые вырабатываются на основании информации, получаемой от различных источников и независимого характера, а именно логический блок контроля положе- 40 ния судов функционирует на основании информации о положении судов относительно шлюза (подход к шлюзу, вход, швартовка в камере, перемещение в противоположный
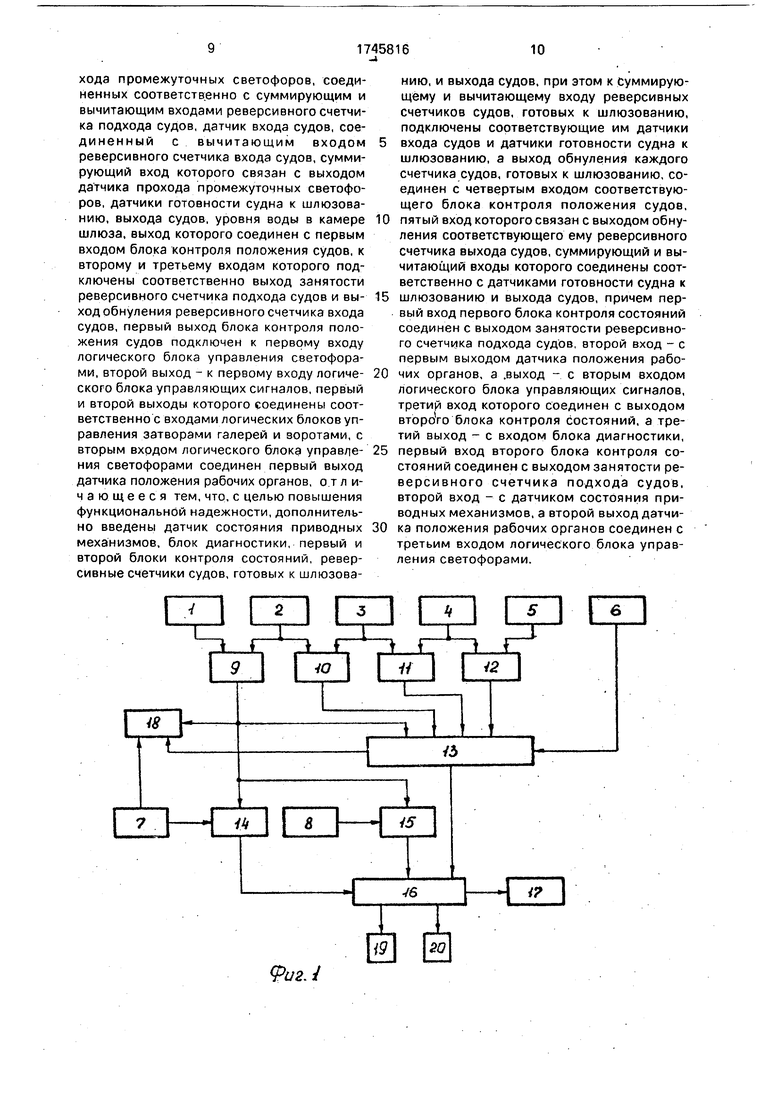
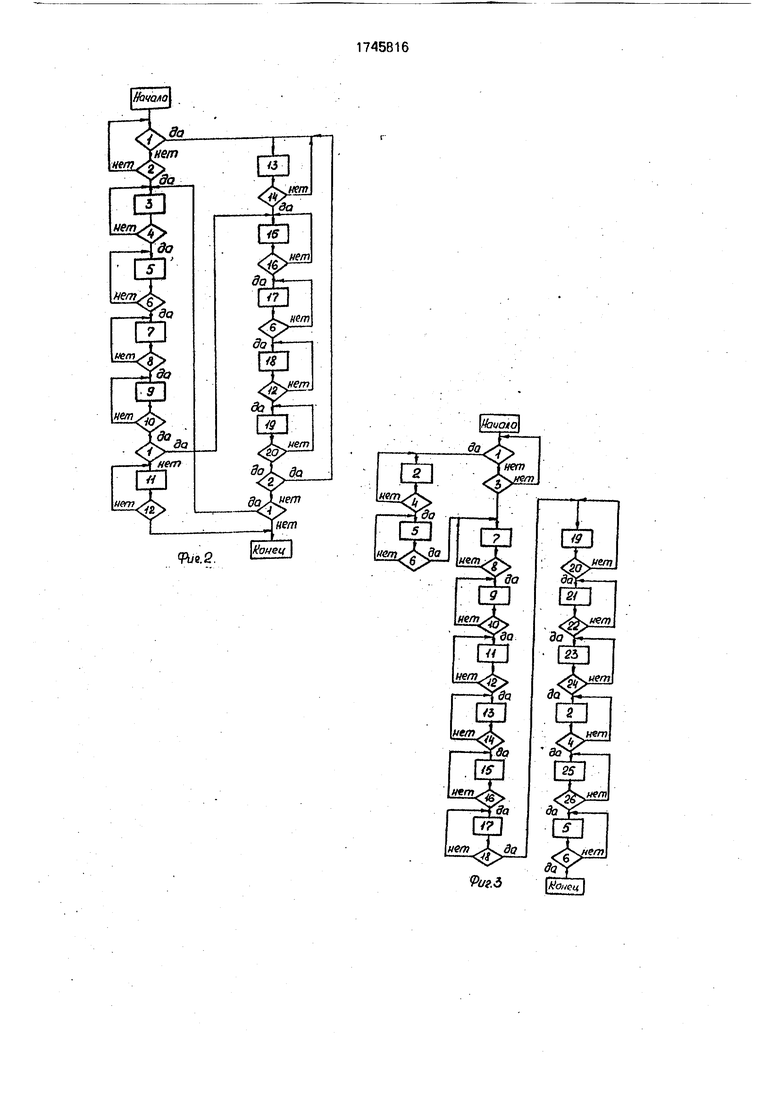
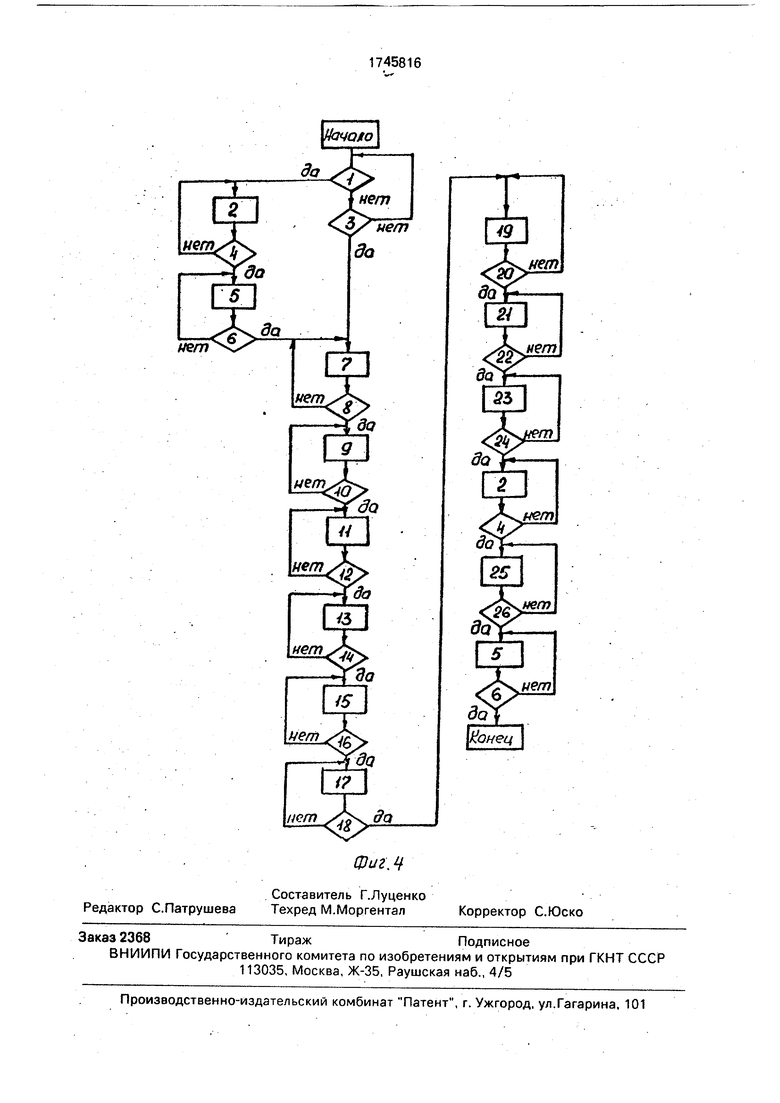
алгоритма функционирования блока контроля положения судов; на фиг.З - блок-схема алгоритма функционирования первого блока контроля состояния (блока контроля состояния рабочих органов); на фиг.4 - блок- схема алгоритма функционирования второго блока контроля состояния (блока контроля состояния приводных механизмов),
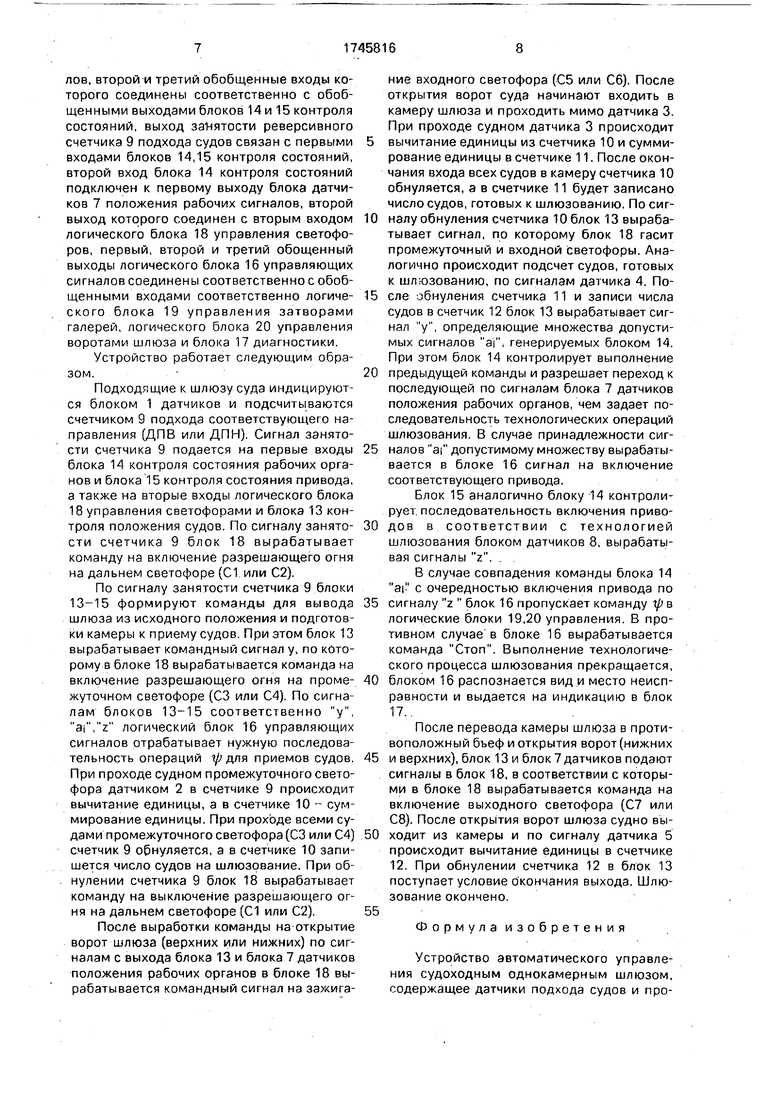
Устройство автоматического управления однокамерным шлюзом (фиг.1) содержит блок 1 датчиков подхода судов, блок 2 датчиков прохода промежуточных светофоров, блок 3 датчиков входа судов (датчиков
15 входа судов в камеру шлюза), датчик 4 готовности судна к шлюзованию, блок 5 датчиков выхода судов, блок 6 датчиков уровня, камеры шлюза, блок 7 датчиков положения рабочих органов, блок 8 датчиков приводных
20 механизмов, реверсивные счетчики 9-12 соответственно подхода судов, входа судов, судов готовых к шлюзованию и выхода судов, блок 13 контроля положения судов, блоки 14 и 15 контроля состояний, логический
25 блок 16 управляющих сигналов, блок 17 диагностики, логический блок 18 управления светофорами, логический блок 19 управления затворами галерей, логический блок 20 управления воротами шлюза, при этом выход блока 1 датчиков подхода судов и выход блока 2 датчиков прохода промежуточных светофоров соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика 9 подхода судов, выход блока 2 датчиков прохода промежуточных светофоров и выход блока 3 датчиков подключены соответственно с суммирующим и вычитающим входами реверсивного счетчика 10 входа судов, выход блока 3 датчиков входа судов и выход датчика 4 готовности судна к шлюзованию связаны соответственно с суммирующим и вычитающим входами реверсивного счетчика 11 судов, готовых к шлюзованию, выход датчика 4 готовности
30
бьеф, выход, подготовка камеры шлюза к 45 судна к шлюзованию и выход блока датчиприему судов), логический блок контроля положения рабочих органов вырабатывает управляющие сигналы на основании информации о положении рабочих затворов и ворот шлюза (открыты, закрыты и т.д.), логический блок контроля состояния привода вырабатывает управляющие сигналы на основании информации о состоянии привода рабочих механизмов (анализ соответствия включения привода на движение в заданном направлении и по заданной программе).
На фиг/1 приведена блок-схема устройства автоматического управления судоходков 5 выхода судов соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика 12 выхода судов, выход блока 6 датчиков уровня под50 ключей к первому входу блока 13 контроля положения судов, второй, третий, четвертый и пятый входы которого связаны соответственно с выходом занятности реверсивного счетчика 9 и с выходом обнуления реверсив55 ных счетчиков 10.11.12, первый обобщенный выход блока 13 соединен с первым обобщенным входом логического блока 18 управления светофорами, второй обобщенный выход - с первым обобщенным входом
0
5 0
алгоритма функционирования блока контроля положения судов; на фиг.З - блок-схема алгоритма функционирования первого блока контроля состояния (блока контроля состояния рабочих органов); на фиг.4 - блок- схема алгоритма функционирования второго блока контроля состояния (блока контроля состояния приводных механизмов),
Устройство автоматического управления однокамерным шлюзом (фиг.1) содержит блок 1 датчиков подхода судов, блок 2 датчиков прохода промежуточных светофоров, блок 3 датчиков входа судов (датчиков
5 входа судов в камеру шлюза), датчик 4 готовности судна к шлюзованию, блок 5 датчиков выхода судов, блок 6 датчиков уровня, камеры шлюза, блок 7 датчиков положения рабочих органов, блок 8 датчиков приводных
0 механизмов, реверсивные счетчики 9-12 соответственно подхода судов, входа судов, судов готовых к шлюзованию и выхода судов, блок 13 контроля положения судов, блоки 14 и 15 контроля состояний, логический
5 блок 16 управляющих сигналов, блок 17 диагностики, логический блок 18 управления светофорами, логический блок 19 управления затворами галерей, логический блок 20 управления воротами шлюза, при этом выход блока 1 датчиков подхода судов и выход блока 2 датчиков прохода промежуточных светофоров соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика 9 подхода судов, выход блока 2 датчиков прохода промежуточных светофоров и выход блока 3 датчиков подключены соответственно с суммирующим и вычитающим входами реверсивного счетчика 10 входа судов, выход блока 3 датчиков входа судов и выход датчика 4 готовности судна к шлюзованию связаны соответственно с суммирующим и вычитающим входами реверсивного счетчика 11 судов, готовых к шлюзованию, выход датчика 4 готовности
0
ков 5 выхода судов соединены соответственно с суммирующим и вычитающим входами реверсивного счетчика 12 выхода судов, выход блока 6 датчиков уровня подключей к первому входу блока 13 контроля положения судов, второй, третий, четвертый и пятый входы которого связаны соответственно с выходом занятности реверсивного счетчика 9 и с выходом обнуления реверсивных счетчиков 10.11.12, первый обобщенный выход блока 13 соединен с первым обобщенным входом логического блока 18 управления светофорами, второй обобщенный выход - с первым обобщенным входом

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления судоходным однокамерным шлюзом | 1982 |
|
SU1118741A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 1997 |
|
RU2123719C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНОГО ШЛЮЗА | 2016 |
|
RU2614534C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 2000 |
|
RU2174711C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 1999 |
|
RU2166798C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 2003 |
|
RU2251152C2 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ ДВУХКАМЕРНОГО СУДОХОДНОГО ШЛЮЗА | 2016 |
|
RU2625612C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 2002 |
|
RU2207629C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНЫХ ШЛЮЗОВ | 2002 |
|
RU2207627C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОЦЕССОВ ФУНКЦИОНИРОВАНИЯ СУДОХОДНОГО ШЛЮЗА | 2016 |
|
RU2628120C1 |
Использование: транспортные судоходные гидротехнические сооружения, в частности устройства автоматического управления судоходными шлюзами. Сущность изобретения: в устройство дополнительно вводятся датчик состояния приводных механизмов, первый и второй блоки контроля состояний, реверсивные счетчики судов, готовых к шлюзованию, и выхода судов. Устройство формирует управляющие воздействия на исполнительные механизмы шлюза только при совпадении выходных сигналов логических блоков контроля положения судов, рабочих органов и состояния привода. При несовпадении указанных выходных сигналов происходит остановка процесса шлюзования и производится поиск неисправностей. 4 ил.
ным шлюзом; на фиг.2 - блок-схема логического блока 16 управляющих сигналов, второй и третий обобщенные входы которого соединены соответственно с обобщенными выходами блоков 14 и 15 контроля состояний, выход занятости реверсивного счетчика 9 подхода судов связан с первыми входами блоков 14,15 контроля состояний, второй вход блока 14 контроля состояний подключен к первому выходу блока датчиков 7 положения рабочих сигналов, второй выход которого соединен с вторым входом логического блока 18 управления светофоров, первый, второй и третий обощенный выходы логического блока 16 управляющих сигналов соединены соответственно с обобщенными входами соответственно логического блока 19 управления затворами галерей, логического блока 20 управления воротами шлюза и блока 17 диагностики.
Устройство работает следующим образом.
Подходящие к шлюзу суда индицируются блоком 1 датчиков и подсчитываются счетчиком 9 подхода соответствующего направления (ДПВ или ДПН). Сигнал занятости счетчика 9 подается на первые входы блока 14 контроля состояния рабочих органов и блока 15 контроля состояния привода, а также на вторые входы логического блока 18 управления светофорами и блока 13 контроля положения судов. По сигналу занятости счетчика 9 блок 18 вырабатывает команду на включение разрешающего огня на дальнем светофоре (С1 или С2).
По сигналу занятости счетчика 9 блоки 13-15 формируют команды для вывода шлюза из исходного положения и подготовки камеры к приему судов При этом блок 13 вырабатывает командный сигнал у, по которому в блоке 18 вырабатывается команда на включение разрешающего огня на промежуточном светофоре (СЗ или С4) По сигналам блоков 13-15 соответственно у, аГ ,г логический блок 16 управляющих сигналов отрабатывает нужную последовательность операций ty для приемов судов. При проходе судном промежуточного светофора датчиком 2 в счетчике 9 происходит вычитание единицы, а в счетчике 10 - суммирование единицы. При проходе всеми судами промежуточного светофора (СЗ илиС4) счетчик 9 обнуляется, а в счетчике 10 запишется число судов на шлюзование. При обнулении счетчика 9 блок 18 вырабатывает команду на выключение разрешающего огня на дальнем светофоре (С1 или С2).
После выработки команды на открытие ворот шлюза (верхних или нижних) по сигналам с выхода блока 13 и блока 7 датчиков положения рабочих органов в блоке 18 вырабатывается командный сигнал на зажигание входного светофора (С5 или С6). После открытия ворот суда начинают входить в камеру шлюза и проходить мимо датчика 3. При проходе судном датчика 3 происходит
вычитание единицы из счетчика 10 и суммирование единицы в счетчике 11. После окончания входа всех судов в камеру счетчика 10 обнуляется, а в счетчике 11 будет записано число судов, готовых к шлюзованию. По сигналу обнуления счетчика 10 блок 13 вырабатывает сигнал, по которому блок 18 гасит промежуточный и входной светофоры. Аналогично происходит подсчет судов, готовых к шлюзованию, по сигналам датчика 4. Поеле обнуления счетчика 11 и записи числа судов в счетчик 12 блок 13 вырабатывает сигнал у, определяющие множества допустимых сигналов ai, генерируемых блоком 14. При этом блок 14 контролирует выполнение
предыдущей команды и разрешает переход к последующей по сигналам блока 7 датчиков положения рабочих органов, чем задает последовательность технологических операций шлюзования. В случае принадлежности сигналов ai допустимому множеству вырабатывается в блоке 16 сигнал на включение соответствующего привода.
Блок 15 аналогично блоку 14 контролирует последовательность включения приводов в соответствии с технологией шлюзования блоком датчиков 8, вырабатывая сигналы z.
В случае совпадения команды блока 14 ai с очередностью включения привода по
сигналу z блок 16 пропускает команду тр в логические блоки 19,20 управления В противном случае в блоке 16 вырабатывается команда Стоп. Выполнение технологического процесса шлюзования прекращается,
блоком 16 распознается вид и место неисправности и выдается на индикацию в блок 17.
После перевода камеры шлюза в противоположный бъеф и открытия ворот (нижних
и верхних), блок 13 и блок 7 датчиков подают сигналы в блок 18, в соответствии с которыми в блоке 18 вырабатывается команда на включение выходного светофора (С7 или С8). После открытия ворот шлюза судно выходит из камеры и по сигналу датчика 5 происходит вычитание единицы в счетчике 12. При обнулении счетчика 12 в блок 13 поступает условие окончания выхода. Шлюзование окончено.
Формула изобретения
Устройство автоматического управления судоходным однокамерным шлюзом, содержащее датчики подхода судов и прохода промежуточных светофоров, соединенных соответственно с суммирующим и вычитающим входами реверсивного счетчика подхода судов, датчик входа судов, соединенный с вычитающим входом реверсивного счетчика входа судов, суммирующий вход которого связан с выходом датчика прохода промежуточных светофоров, датчики готовности судна к шлюзованию, выхода судов, уровня воды в камере шлюза, выход которого соединен с первым входом блока контроля положения судов, к второму и третьему входам которого подключены соответственно выход занятости реверсивного счетчика подхода судов и вы- ход обнуления реверсивного счетчика входа судов, первый выход блока контроля положения судов подключен к первому входу логического блока управления светофорами, второй выход - к первому входу логиче- ского блока управляющих сигналов, первый и второй выходы которого соединены соответственно с входами логических блоков управления затворами галерей и воротами, с вторым входом логического блока управле- ния светофорами соединен первый выход датчика положения рабочих органов, отличающееся тем, что, с целью повышения функциональной надежности, дополнительно введены датчик состояния приводных механизмов, блок диагностики, первый и второй блоки контроля состояний, реверсивные счетчики судов, готовых к шлюзоваФиг.4
нию, и выхода судов, при этом к суммирующему и вычитающему входу реверсивных счетчиков судов, готовых к шлюзованию, подключены соответствующие им датчики входа судов и датчики готовности судна к шлюзованию, а выход обнуления каждого счетчика судов, готовых к шлюзованию, соединен с четвертым входом соответствующего блока контроля положения судов, пятый вход которого связан с выходом обнуления соответствующего ему реверсивного счетчика выхода судов, суммирующий и вычитающий входы которого соединены соответственно с датчиками готовности судна к шлюзованию и выхода судов, причем первый вход первого блока контроля состояний соединен с выходом занятости реверсивного счетчика подхода судов, второй вход - с первым выходом датчика положения рабочих органов, а .выход - с вторым входом логического блока управляющих сигналов, третий вход которого соединен с выходом второго блока контроля состояний, а третий выход - с входом блока диагностики, первый вход второго блока контроля состояний соединен с выходом занятости реверсивного счетчика подхода судов, второй вход - с датчиком состояния приводных механизмов, а второй выход датчика положения рабочих органов соединен с третьим входом логического блока управления светофорами.
%е.2
Pw.3
| Устройство автоматического управления судоходным однокамерным шлюзом | 1982 |
|
SU1118741A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
