Изобретение относится к машиностроению и может быть использовано в машинах объемного типа, в частности в гидронасосах, компрессорах, гидро-и пнев- модвигателях, а также в тепловых двигате- лях.
Известна роторная машина, содержащая корпус, во внутренней полости которого с образованием рабочих камер установлены два лопастных ротора, закреп- ленных на концентричных валах, и механизм синхронизации, посредством которого выходной вал соединен с роторами. Механизм синхронизации выполнен в виде концентрично расположенных внут- реннего и наружного универсальных шарниров, каждый из которых соединяет один из роторов с выходным валом, установленным под углом к общей оси вращения роторов и соединенным с приводным двигателем. Вилки универсальных шарниров, установленные на выходном валу, имеют взаимно перпендикулярные и расположенные в одной поперечной плоскости оси ушек.
В такой машине объем камер, заключенных между лопастями роторов, Б течение каждого оборота выходного вала изменяется в результате неравномерного вращения роторов, совершающих за этот период два полных колебания в противофазе друг к другу. Амплитуда этих колебаний, а следовательно, и степень сжатия заключенных между лопастями камер, то есть отношение максимального объема камер к минимальному, и производительность машины определяются величиной угла отклонения оси выходного вала от общей оси роторов - чем больше этот угол, тем больше амплитуда, степень сжатия и производительность. Про- изводительность такой машины может быть увеличена также за счет увеличения частоты вращения выходного вала. Оба указанных способа повышения призводительности снижают надежность машины как из-за больших нагрузок в соединениях универсальных шарниров, так и в результате повышения динамических нагрузок, возникающих при неравномерном вращении с большой частотой обоих роторов. Кро- ме того, такая роторная машина имеет большие габаритные размеры из-за необходимости расположения ее приводного двигателя под углом к продольной оси самой машины.
Наиболее близкой по технической сущности к заявляемой является роторная машина, содержащая корпус, во внутренней полости которого с образованием рабочих камер установлены два лопастных ротора,
закрепленных на концентричных вала х, и механизм синхронизации, включающий планетарную передачу, водило которой соединено с выходным валом, установленным соосно продольной оси машины, при этом центральное колесо соединено с корпусом, а сателлит кинематически связан с роторами посредством вилки. Ось сателлита параллельна оси роторов. Механизм синхронизации содержит также конический дифференциальный механизм с двумя зеркально расположенными коническими шестернями, каждая из которых закреплена на валу одного из роторов, и находящимися с ними в зацеплении двумя сателлитами, ось которых расположена перпендикулярно оси роторов и соединена с водилом. Сателлит планетарной передачи связан с сателлитом дифференциального механизма посредством тяги с двумя вилками, одна из которых присоединена к кривошипу сателлита планетарной передачи, а другая - к оси, установленной в сателлите дифференциального механизма радиально и с возможностью вращения.
В такой роторной машине приводной двигатель располагается соосно роторам, а количество тактов сжатия и расширения зависит от передаточного числа планетарного механизма - чем больше передаточное число, тем больше количество тактов и тем больше производительность при одной и той же частоте вращения приводного двигателя.
Недостатком такой роторной машины является низкая надежность из-за конструктивной сложности механизма синхронизации вращения роторов, содержащего планетарную передачу, дифференциальный механизм и многозвенный соединительный механизм их сателлитов.
Цель изобретения - повышение надежности роторной машины. Использование изобретения упростит конструкцию машины, снизит ее массу и уменьшит ее габариты в осевом направлении.
Цель достигается тем, что кинематическая связь сателлита с роторами машины выполнена в виде качающейся шайбы и втулки, установленных на валу сателлита, перпендикулярном продольной оси машины и служащем ведущим валом шайбы, которая снабжена диаметрально противоположными шипами, шарнирно соединенными с вилкой. Вилка связана с одним из роторов, а водило планетарной передачи соединено с вторым ротором.
На фиг.1 изображена роторная машина, общий вид; на фиг.2 - то же, вид сверху; на фиг.З - разрез А-А на фиг. 1; на фиг 4 - зависимость угла поворота роторов машины от угла поворота ее ведущего вала и кинематическая схема механизма синхронизации вращения роторов.
Роторная машина состоит из двух бло- ков: роторного блока и механизма синхронизации вращения роторов.
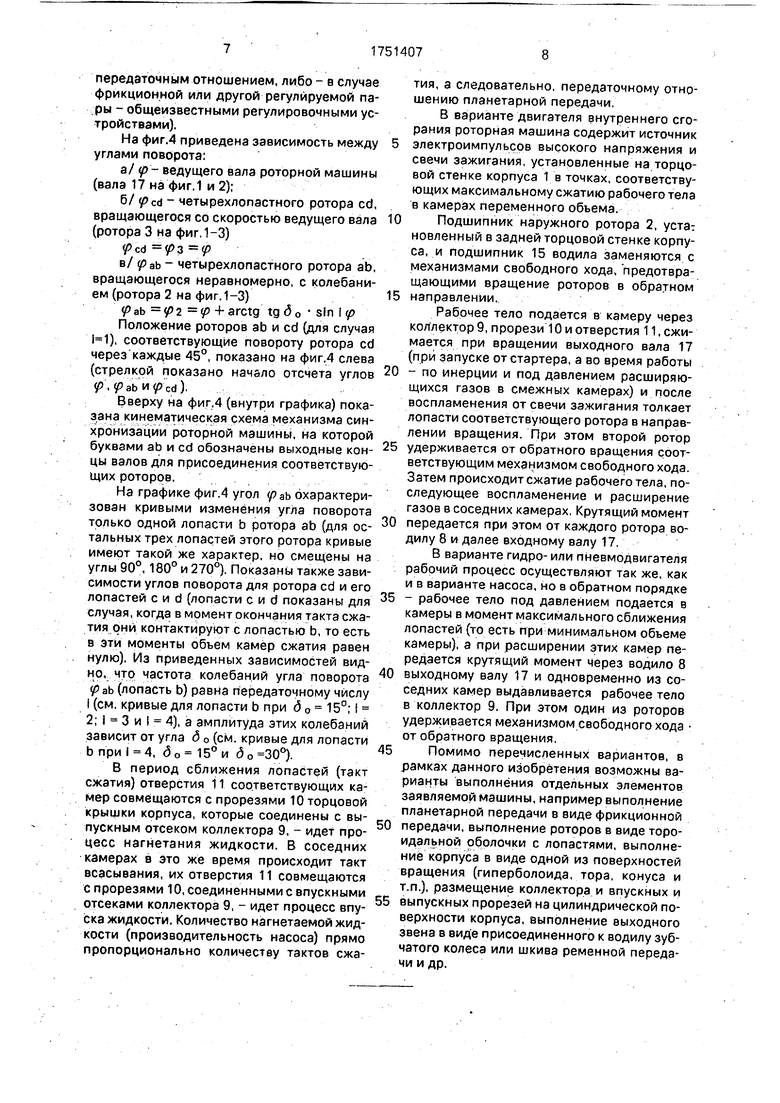
В отделении роторного блока корпуса 1 установлены соосно с возможностью углового перемещения друг относительно друга два ротора наружный 2 и внутренний 3, каждый с четырьмя радиальными лопастями соответственно 4 и 5, которыми они взаимно вставлены друг в друга с образованием при этом камер переменного объема между каж- дои парой соседних лопастей. Наружный ротор 2 установлен на валу 6, а внутренний ротор 3 - на хвостовике 7 водила 8.
На задней торцовой стенке корпуса 1 закреплен коллектор 9 впускной и выпуск- ной магистралей машины, снабженных отсеками, установленными напротив соответствующих впускной и выпускной, прорезей 10 в торцовой стенке В наружном роторе 2 напротив этих прорезей имеются отверстия 11, соединяющие камеры переменного объема через прорези с соответствующими, впускным и выпускным, отсеками коллектора 9.
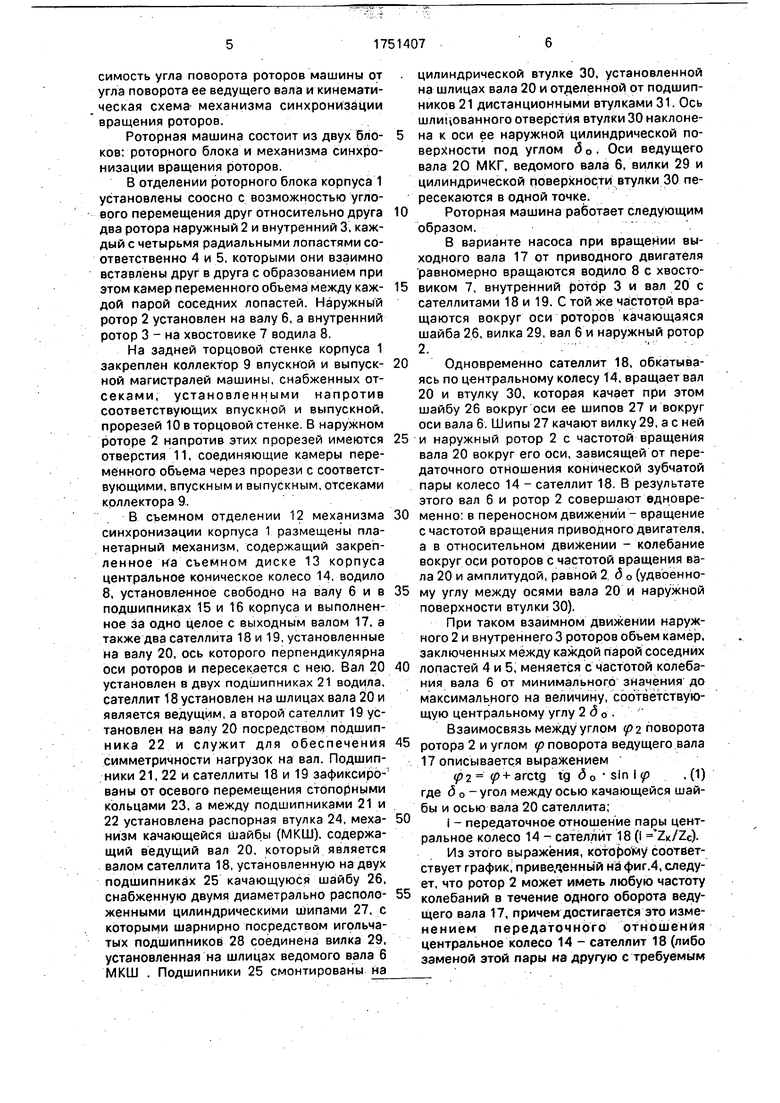
В съемном отделении 12 механизма синхронизации корпуса 1 размещены планетарный механизм, содержащий закрепленное rfa съемном диске 13 корпуса центральное коническое колесо 14, водило 8, установленное свободно на валу 6 и в подшипниках 15 и 16 корпуса и выполненное за одно целое с выходным валом 17, а также два сателлита 18 и 19, установленные на валу 20, ось которого перпендикулярна оси роторов и пересекается с нею. Вал 20 установлен в двух подшипниках 21 водила, сателлит 18 установлен на шлицах вала 20 и является ведущим, а второй сателлит 19 установлен на валу 20 посредством подшипника 22 и служит для обеспечения симметричности нагрузок на вал. Подшипники 21, 22 и сателлиты 18 и 19 зафиксированы от осевого перемещения стопорными кольцами 23, а между подшипниками 21 и 22 установлена распорная втулка 24, меха- низм качающейся шайбы (МКШ), содержащий ведущий вал 20, который является валом сателлита 18, установленную на двух подшипниках 25 качающуюся шайбу 26, снабженную двумя диаметрально располо- женными цилиндрическими шипами 27, с которыми шарнирно посредством игольчатых подшипников 28 соединена вилка 29, установленная на шлицах ведомого вала 6 МКШ . Подшипники 25 смонтированы на
цилиндрической втулке 30, установленной на шлицах вала 20 и отделенной от подшипников 21 дистанционными втулками 31. Ось шлицованного отверстия втулки 30 наклонена к оси ее наружной цилиндрической поверхности под углом б о Оси ведущего вала 20 МКГ, ведомого вала 6, вилки 29 и цилиндрической поверхности втулки 30 пересекаются в одной точке.
Роторная машина работает следующим образом.
В варианте насоса при вращении выходного вала 17 от приводного двигателя равномерно вращаются водило 8 с хвостовиком 7, внутренний ротор 3 и вал 20 с сателлитами 18 и 19. С той же частотой вращаются вокруг оси роторов качающаяся шайба 26, вилка 29, вал 6 и наружный ротор 2.
Одновременно сателлит 18, обкатываясь по центральному колесу 14, вращает вал 20 и втулку 30, которая качает при этом шайбу 26 вокруг оси ее шипов 27 и вокруг оси вала 6. Шипы 27 качают вилку 29, а с ней и наружный ротор 2 с частотой вращения вала 20 вокруг его оси, зависящей от передаточного отношения конической зубчатой пары колесо 14 - сателлит 18В результате этого вал 6 и ротор 2 совершают едновре- менно1 в переносном движении - вращение с частотой вращения приводного двигателя, а в относительном движении - колебание вокруг оси роторов с частотой вращения вала 20 и амплитудой, равной 2 д о (удвоенному углу между осями вала 20 и наружной поверхности втулки 30).
При таком взаимном движении наружного 2 и внутреннего 3 роторов объем камер, заключенных между каждой парой соседних лопастей 4 и 5, меняется с частотой колебания вала 6 от минимального значения до максимального на величину, соответствующую центральному углу 2 6 0
Взаимосвязь между углом р 2 поворота ротора 2 и углом р поворота ведущего вала 17 описывается выражением
2 # +arctg tg 50 sinip , (1) где д о - угол между осью качающейся шайбы и осью вала 20 сателлита;
i - передаточное отношение пары центральное колесо 14 - сателлит 18 (I ZK/ZC).
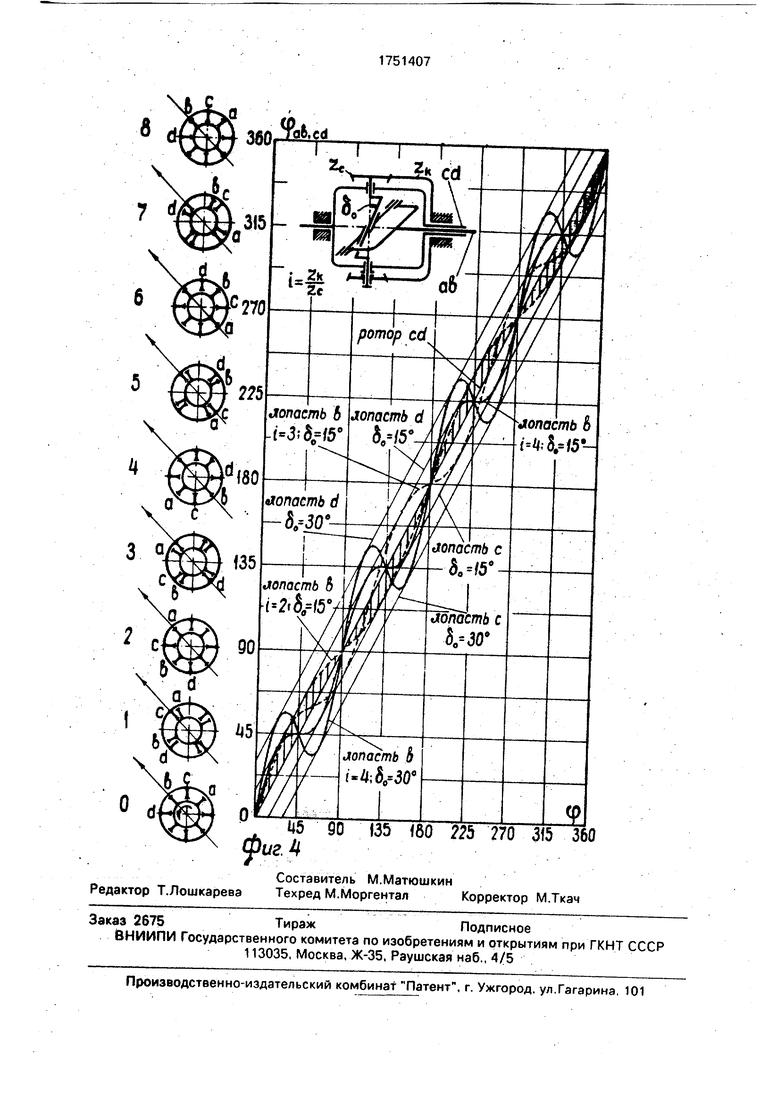
Из этого выражения, которому соответствует график, приведенный нафиг.4, следует, что ротор 2 может иметь любую частоту колебаний в течение одного оборота ведущего вала 17, причем достигается это изме- нением передаточного отношения центральное колесо 14 - сателлит 18 (либо заменой этой пары на другую с требуемым
передаточным отношением, либо - в случае фрикционной или другой регулируемой пары - общеизвестными регулировочными устройствами).
На фиг.4 приведена зависимость между углами поворота:
а/ р- ведущего вала роторной машины (вала 17 на фиг.1 и 2);
б/ р cd - четырехлопастного ротора cd, вращающегося со скоростью ведущего вала (ротора 3 на фиг. 1-3)
Р
в/ раь четырехлопастного ротора ab, вращающегося неравномерно, с колебанием (ротора 2 на фиг. 1-3)
+ arctg tg (5 о sin I f
Положение роторов ab и cd (для случая
), соответствующие повороту ротора cd
через каждые 45°, показано на фиг.4 слева
(стрелкой показано начало отсчета углов
р, раЬ Hpcd).
Вверху на фиг,4 (внутри графика) показана кинематическая схема механизма синхронизации роторной машины, на которой буквами ab и cd обозначены выходные концы валов для присоединения соответствующих роторов.
На графике фиг.4 угол раь охарактеризован кривыми изменения угла поворота только одной лопасти b ротора ab (для остальных трех лопастей этого ротора кривые имеют такой же характер, но смещены на углы 90°, 180° и 270°). Показаны также зависимости углов поворота для ротора cd и его лопастей end (лопасти end показаны для случая, когда в момент окончания такта сжатия они контактируют с лопастью Ь, то есть в эти моменты объем камер сжатия равен нулю). Из приведенных зависимостей видно, что частота колебаний угла поворота (лопасть Ь) равна передаточному числу I (см. кривые для лопасти Ь при д 0 15°; I 2; i 3 и I 4), а амплитуда этих колебаний зависит от угла б о (см. кривые для лопасти Ь при i 4, д о 15° и д0 30°).
В период сближения лопастей (такт сжатия) отверстия 11 соответствующих камер совмещаются с прорезями 10 торцовой крышки корпуса, которые соединены с выпускным отсеком коллектора 9, - идет процесс нагнетания жидкости. В соседних камерах в это же время происходит такт всасывания, их отверстия 11 совмещаются С прорезями 10, соединенными с впускными отсеками коллектора 9, - идет процесс впуска жидкости. Количество нагнетаемой жидкости (производительность насоса) прямо пропорционально количеству тактов сжатия, а следовательно, передаточному отношению планетарной передачи.
В варианте двигателя внутреннего сгорания роторная машина содержит источник
электроимпульсов высокого напряжения и свечи зажигания, установленные на торцовой стенке корпуса 1 в точках, соответствующих максимальному сжатию рабочего тела в камерах переменного объема.
Подшипник наружного ротора 2, уста: новленный в задней торцовой стенке корпуса, и подшипник 15 водила заменяются с механизмами свободного хода предотвращающими вращение роторов в обратном
направлении.
Рабочее тело подается в камеру через коллектор 9, прорези 10 и отверстия 11, сжимается при вращении выходного вала 17 (при запуске от стартера, а во время работы
- по инерции и под давлением расширяющихся газов в смежных камерах) и после воспламенения от свечи зажигания толкает лопасти соответствующего ротора в направлении вращения. При этом второй ротор
удерживается от обратного вращения соответствующим механизмом свободного хода. Затем происходит сжатие рабочего тела, последующее воспламенение и расширение газов в соседних камерах, Крутящий момент
передается при этом от каждого ротора во- дилу 8 и далее входному валу 17.
В варианте гидро- или пневмодвигателя рабочий процесс осуществляют так же, как и в варианте насоса, но в обратном порядке
- рабочее тело под давлением подается в камеры в момент максимального сближения лопастей (то есть при минимальном объеме камеры), а при расширении этих камер передается крутящий момент через водило 8
выходному валу 17 и одновременно из соседних камер выдавливается рабочее тело в коллектор 9. При этом один из роторов удерживается механизмом свободного хода от обратного вращения.
Помимо перечисленных вариантов, в рамках данного изобретения возможны варианты выполнения отдельных элементов заявляемой машины, например выполнение планетарной передачи в виде фрикционной
передачи, выполнение роторов в виде тороидальной оболочки с лопастями, выполнение корпуса в виде одной из поверхностей вращения (гиперболоида, тора, конуса и т.п.), размещение коллектора и впускных и
выпускных прорезей на цилиндрической поверхности корпуса, выполнение выходного звена в виде присоединенного к водилу зубчатого колеса или шкива ременной передачи и др.
Формула изобретения Роторная машина содержащая корпус, во внутренней полости которого с образованием рабочих камер установлены два лопастных ротора, закрепленных на концентрических валах, и механизм синхронизации, включающий планетарную передачу, водило которой соединено с выходным валом, установленным соосно продольной оси машины, при этом центральное колесо соединено с корпусом, а сателлит кинематически соединен с роторами кинематической
связью с вилкой, отличающаяся тем, что, с целью повышения надежности, кинематическая связь сателлита выполнена в виде качающейся шайбы и втулки, установленных на валу сателлита, перпендикулярном продольной,оси машины и служащем ведущим валом шайбы, которая снабжена диаметрально противоположными шипами, шарнирно соединенными с вилкой, а последняя связана с одним из роторов, при этом водило планетарной передачи соединено с вторым ротором.
Изобретение относится к машинам объемного типа и может быть использовано в тепловых двигателях, гидро-и пневмомаши- нах. С целью упрощения и повышения надежности машины в ее корпус 1 установлены соосно с возможностью углового перемещения друг относительно друга W L± 11 И .. L 7,2 2318 два ротора 2 и 3 с лопастями, которыми они взаимно вставлены друг в друга с образованием при этом камер переменного объема Выходное звено 17 установлено соосно роторам 2 и 3 и соединено с ними механизмом синхронизации вращения, включенным в виде планетарной передачи, водило 8 которой соединено с выходным звеном и с ротором 2, центральное колесо 14 - с корпусом 1, а на валу 20 сателлита 18 установлена качающаяся шайба 26 с двумя перпендикулярными этому валу 20 и противонаправленными шипами и с присоединенной к ним вилкой, жестко закрепленной на ротор 3 Ось вала 20 сателлитов 18 и 19 перпендикулярна оси роторов 2 и 3. Производительность машины определяется передаточным отношением планетарной передачи. 4 ил 7,2 2318 Ё Ч| сл Ј о v| 22 Фиг 1
| Патент США Nfe 3333546, кл | |||
| Способ пропитывания дерева | 1925 |
|
SU418A1 |
