Изобретение относится к машиностроению, в частности к роторно-лопастным объемным машинам, и может быть использовано в двигателестроении.
Известен двигатель с кольцевой рабочей камерой, в которой размещены две пары лопастей, одна из которых равномерно вращается с выходным валом, а другая пара лопастей кинематически связана с валом механизмом периодического изменения угловой скорости, выполненным в виде кривошипно-шатунной передачи, в которой один конец шатуна закреплен эксцентрично на шестерне, обкатывающейся по неподвижной опорной шестерне, а второй конец шатуна на качающемся элементе и совершает относительно выходного вала возвратно-вращательное движение по дуге окружности.
Недостатком этой конструкции являются значительные инерционно-вращательные нагрузки на выходном валу и шестернях от качающейся пары лопастей, несинусоидальный характер колебаний и громоздкость конструкции.
Известен также двигатель, содержащий цилиндрическую полость, размещенные в ней секторные лопасти, установленные на соосных валах, и механизм преобразования движения лопастей, выполненный в виде пары рычагов, соединенных валами лопастей, и кулисы, установленной на выходном валу и взаимодействующей с роликами рычагов таким образом, что обеспечивается качание пар лопастей в противофазе относительного выходного вала.
К недостаткам этой конструкции относятся низкая надежность взаимодействия роликов с поверхностями обкатки из-за неуравновешенных инерционных моментов на выходном валу и деталях механизма от инерционно-вращательных сил лопастей, малый ресурс работы, большая масса и габариты и т.п.
Известна также среднеосевая ротационно поршневая машина (прототип) с двумя неравномерно вращающимися внутри кольцеобразного кожуха поршневыми парами, находящимися в противофазе с помощью планетарного механизма, который состоит из укрепленного на корпусе основного конического колеса, сцепленного с планетарным (сателлитным) зубчатым колесом внутри чашкообразного корпуса. Каждая пара поршней снабжена валом с планетарным приводом. Между каждым планетарным зубчатым колесом и валом не параллельно к оси колеса находится шарнирный шток, который поворотно размещен в планетарном колесе и таким образом связан с каждым валом, что вращается в той плоскости, которая образуется осью вала и линией зацепления комплекта зубчатых колес.
Этой конструкции также присущи недостатки, относящиеся к значительным знакопеременным инерционным моментам на выходном валу от лопастей, значительным инерционным нагрузкам на зубчатые пары и элементы механизма, наличие дополнительного к полувалам лопастей выходного вала с дополнительными шестеренчатыми передачами.
Технический результат, полученный при использовании данного изобретения, состоит в уравновешивании знакопеременных инерционных моментов сил на выходном валу, возникающих от качания лопастей, устранении инерционных нагрузок на шестерни механизма, улучшение массо-габаритных характеристик за счет снижения веса маховика, уменьшения нагрузок на элементы механизма качания лопастей, устранения дополнительной зубчатой передачи с чашкообразного корпуса на выходной вал, упрощения конструкции.
Этот результат достигается тем, что в конструкцию каждого из двух механизмов качания вводится вращающийся в корпусе машины кольцеобразный балансировочный груз, соединенный с саталлитной шестерней с помощью штыря, закрепленного на шестерне, который может проворачиваться и скользить в прорези балансировочного груза, выполненной в плоскости, проходящей через ось вращения лопастей, причем ось штыря проходит через точку пересечения сателлитного вала с осью вращения лопастей, оптимальное угловое расстояние точки закрепления штыря на шестерне от точки приложения силы к шестерне со стороны лопастей составляет 90о (оптимальный угол). Такое закрепление балансировочного груза при определенном соотношении моментов инерции груза и лопастей с радиусами закрепления на сателлитной шестерне точки приложения силы лопастей и штыря приводит к отсутствию на выходе машины знакопеременных инерционных моментов и отсутствию на шестернях инерционных нагрузок от качания лопастей.
Исполнение выходного вала из двух частей с рамкообразной частью, в которой размещается сателлитный механизм качания лопастей, и соединение этих валов соединительной муфтой позволило устранить дополнительную (к сателлитной) зубчатую передачу. Исполнение сателлитного вала в виде единой жесткой конструкции с противовесом сателлитной шестерни разгружает подшипники сателлитного вала от центробежных сил, уменьшает на них радиальные нагрузки и уменьшает габариты механизма.
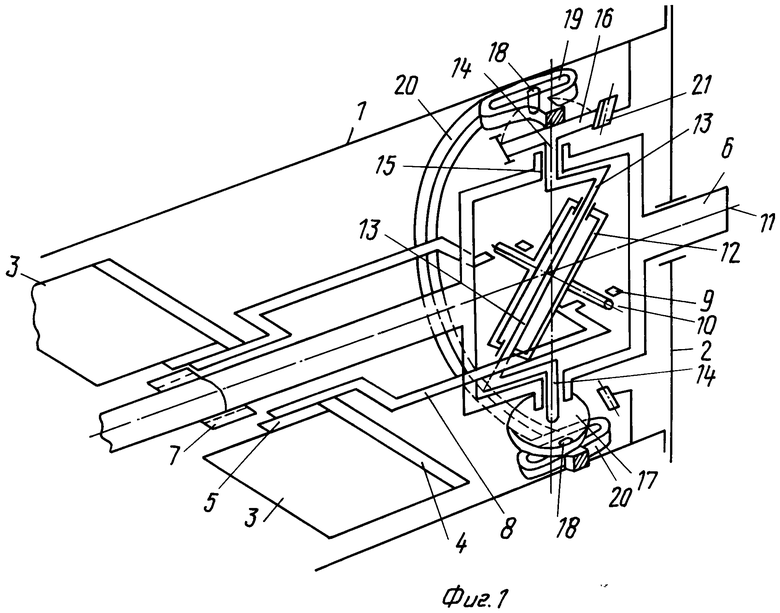
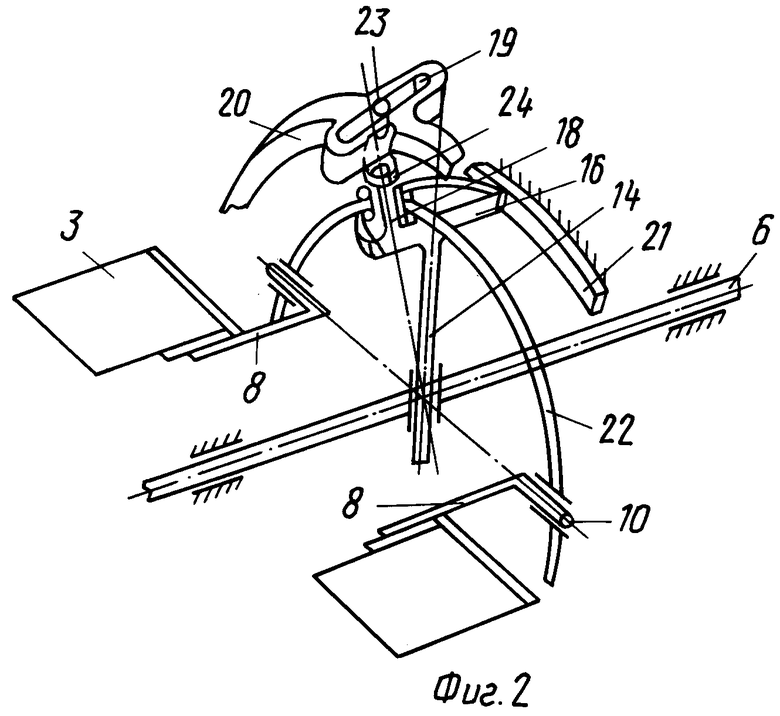
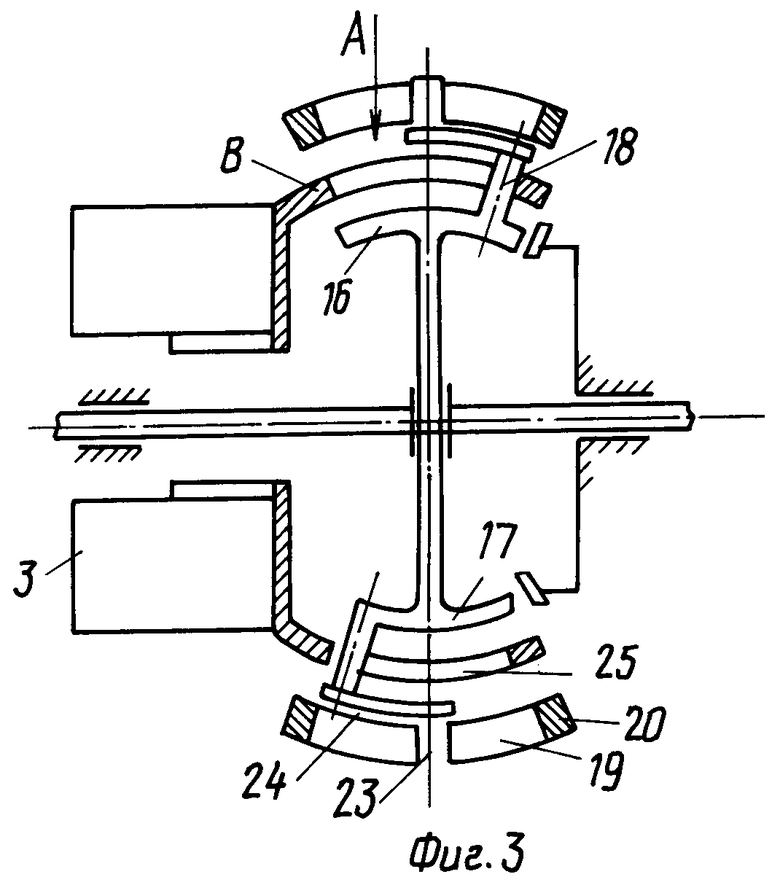
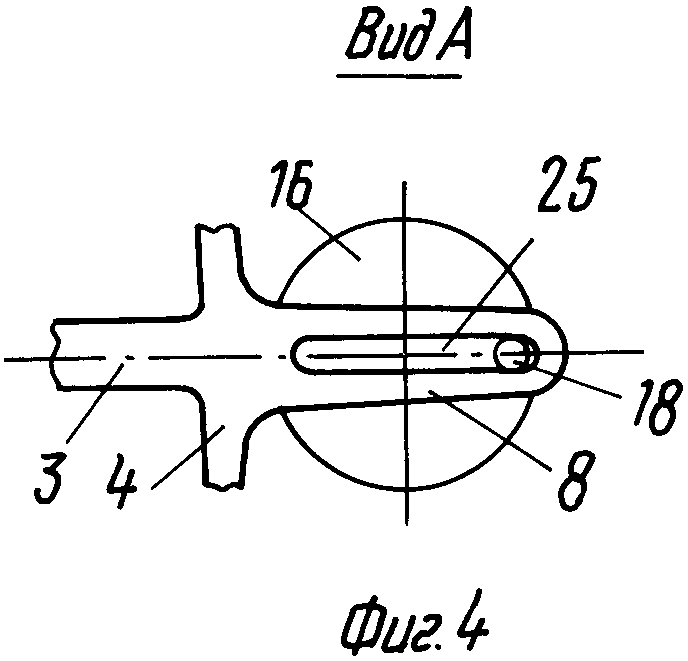
На фиг. 1 представлена исходная конструктивная схема машины; на фиг. 2 - вариант машины с использованием сферического шатуна; на фиг. 3 - вариант машины с использованием скользящей опоры для связи лопастей с сателлитной шестерней; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - вариант машины с использованием наклонного подшипника на сателлитном валу; на фиг. 6 - разрез Б-Б на фиг. 5; на фиг. 7 - вариант исполнения конструктивной связи балансировочного груза с сателлитной шестерней с помощью сферического шатуна; на фиг. 8 - вариант исполнения балансировочного груза в виде сферического шатуна; на фиг. 9 - разрез В-В на фиг. 8.
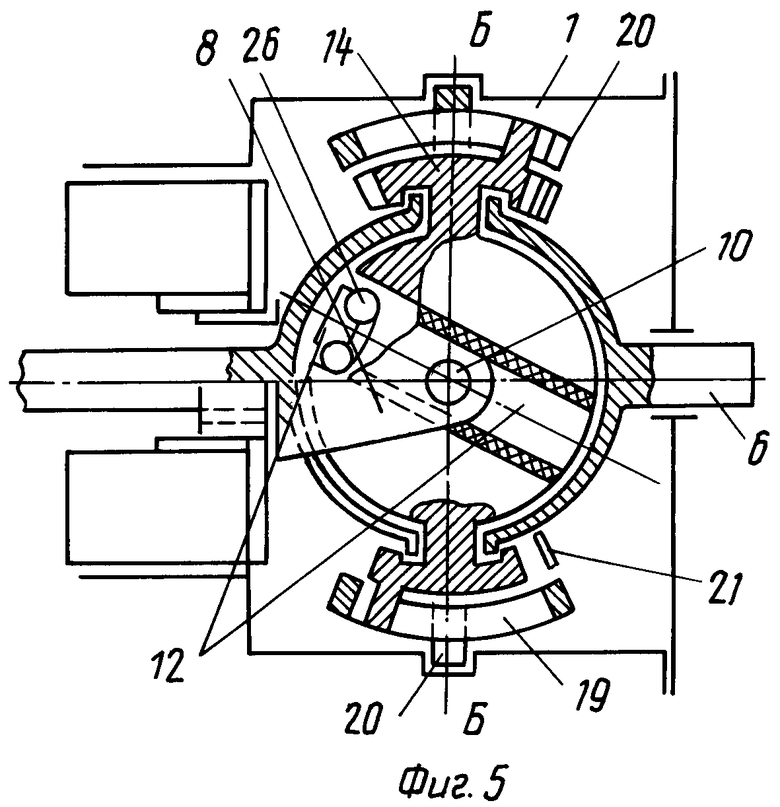
Предлагаемая машина содержит цилиндрический корпус 1 с торцовыми крышками 2, две пары лопастей 3 (на схеме показана половина машины, вторая половина симметрична) с боковыми крышками 4 и центральными втулками 5, две части выходного вала 6, которые с помощью соединительной муфты 7 образуют единый вал, два механизма качания лопастей, каждый из которых содержит ведущую вилку 8, внутри которой проходит выходной вал и которая жестко скреплена с лопастями 3, в подшипниках 9 которой на оси 10, перпендикулярной оси 11 вращения лопастей и выходного вала, установлен промежуточный элемент 12, который может вращаться вокруг наклонной части 13 сателлитного вала 14, выполненного в виде косого кривошипа и вращающегося в подшипниках 15, укрепленных на валу 6 в рамкообразной его части так, что ось сателлитного вала перпендикулярна оси выходного вала. На одном конце сателлитного вала 14 закреплена сателлитная шестерня 16, а на другом конце противовес 17, причем на сателлитной шестерне и на противовесе установлены штыри 18, ось которых проходит через точку пересечения осей сателлитного вала и лопастей, штыри 18 входят в прорезь 19 (в которой могут проворачиваться и скользить) кольцеобразного балансировочного груза 20, прорезь выполнена в плоскости, проходящей через ось вращения лопастей, а балансировочный груз может вращаться в корпусе. К корпусу жестко закреплена шестерня 21, находящаяся в зацеплении с сателлитной шестерней 16.
Кроме описанной схемы возможны другие варианты конструктивного исполнения механизма. На фиг. 2 представлен вариант, в котором ведущая вилка 8 лопастей с помощью введенного сферического шатуна 22 шарнирно соединена с эксцентрично расположенными штырями 18 сателлитной шестерни 16 и противовеса, а в прорезь 19 груза 20 входят пальцы 23, закрепленные с помощью кронштейнов 24 на штырях сателлитной шестерни и противовеса. В этой конструкции не требуется рамкообразной части выходного вала и сателлитный вал выполнен в виде обычного прямого вала без наклонной части.
На фиг. 3 ведущая вилка 8 лопастей выполнена в виде кронштейнов с прорезями 25 в плоскости, проходящей через ось лопастей; в прорези могут скользить и проворачиваться штыри 18 сателлитной шестерни 16 и противовеса 17, а сферический шатун 22 (фиг. 2) отсутствует.
На фиг. 4 промежуточный элемент 12 выполнен в виде кольца и закреплен на подшипнике 26, воспринимающем двухсторонние осевые нагрузки, подшипник наклонно установлен на сателлитном валу 14, при этом наклонная часть сателлитного вала отсутствует.
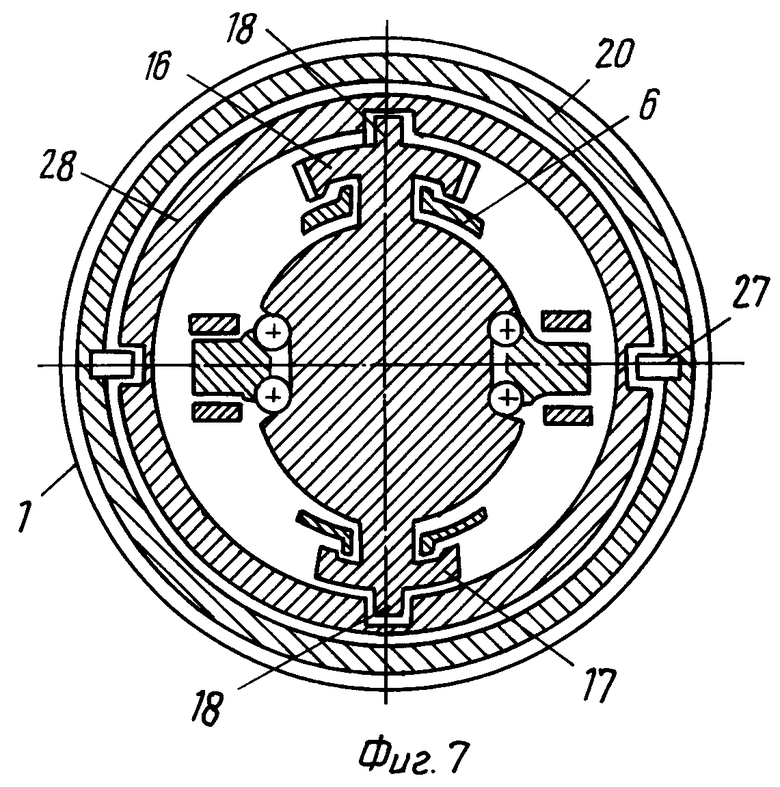
На фиг. 5 на кольцеобразном балансировочном грузе 20 установлены цилиндрические выступы 27, которые могут проворачиваться в специально введенном в конструкцию сферическом шатуне 28, который, в свою очередь, шарнирно скреплен с штырями 18 сателлитной шестерни 16 и противовеса 17, в этом случае прорези в балансировочном грузе для штырей 18 отсутствуют.
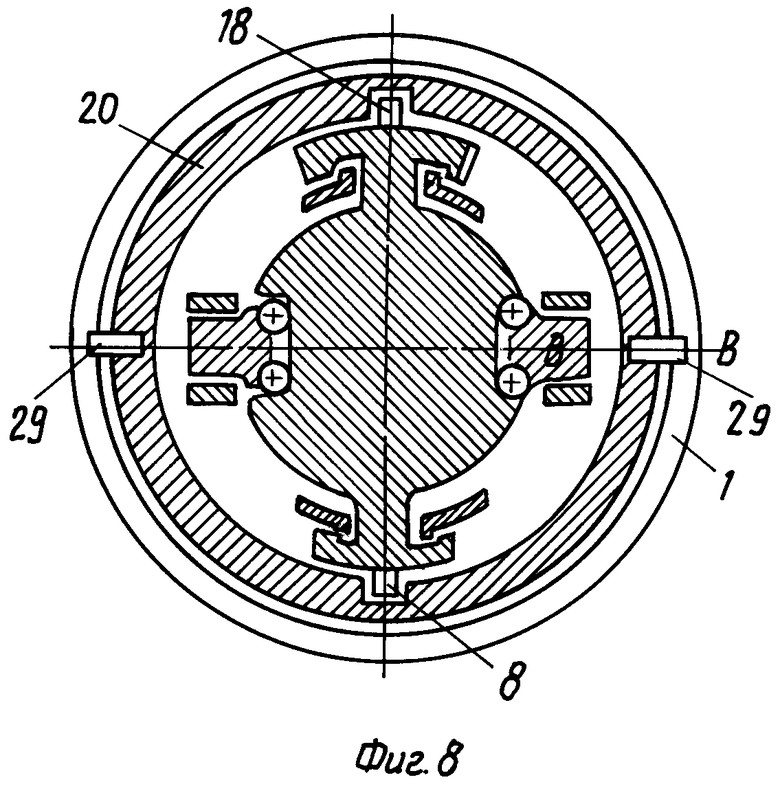
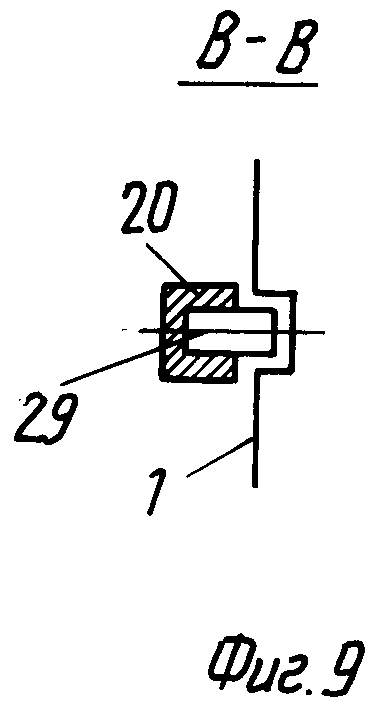
На фиг. 6 роль балансировочного груза выполняет сферический шатун 20, который может проворачиваться относительно штырей 18 сателлитной шестерни и противовеса, а также с помощью закрепленных на шатуне стержней 29 может проворачиваться в корпусе машины, при этом стержни 29 скользят и проворачиваются в направляющих корпуса, установленных в плоскости, проходящей через ось сателлитного вала и перпендикулярной выходному валу.
Объемная машина работает следующим образом.
При вращении выходного вала 6 (фиг. 1) сателлитная шестерня 16 обкатывается по неподвижной шестерне 21, а так как радиус зацепления шестерни 16 в два раза меньше радиуса зацепления шестерни 21, то за половину оборота выходного вала сателлитный вал 14 делает полный оборот, а с помощью промежуточного элемента 12 ведущая вилка лопастей вместе с парой лопастей 3 осуществляет полный период колебаний относительно выходного вала. Вторая пара лопастей при этом совершает колебания в противофазе. За полный оборот выходного вала в каждой из четырех камер осуществляются все четыре цикла четырехтактного двигателя (всасывание, сжатие, рабочий ход и выхлоп); рабочий ход осуществляется через каждые 90о поворота выходного вала, что эквивалентно 8-ми цилиндровому двигателю обычной схемы.
При неравномерном вращении лопастей 3 вращательно-инерционные моменты силы от них с ведущей вилкой 8 и приведенной массой промежуточного элемента 12 равны и противоположны по направлению, но они могут быть приведены к приложению через сателлитный вал к сателлитной шестерне 16 в точке пересечения плоскости зацепления шестерни с осью наклонной части сателлитного вала с разными плечами для разных пар лопастей относительно точки зацепления шестерен. Это создает разные крутящие моменты на сателлитной шестерне, которые воспринимаются через ось сателлитного вала 14 выходным валом 6, что и создает на нем знакопеременный инерционно-вращательный момент, нагрузки от которого на элементы конструкции могут в несколько раз превышать нагрузки от газодинамических сил.
При закреплении штыря 18, скользящего и поворачивающегося в прорези балансировочного груза 20, на сателлитной шестерне 16 с угловым смещением 90о относительно точки пересечения наклонной части сателлитного вала с плоскостью сателлитной шестерни, проходящей через точку зацепления, инерционные моменты пары: лопасть-груз определяются выражением
Мд1 + Мб1= А (cos 2 Q - sin 2 Q),
Мд2 + Мб2 = А (- сos 2 Q + sin 2 Q), где Мл1 и Мл2 - инерционные моменты сил со стороны первой и второй пар соответственно;
Мб1, Мб2 - инерционные моменты сил первого и второго грузов соответственно;
Q - угол поворота выходного вала;
А - конструктивный параметр.
Суммируясь, эти моменты полностью разгрузят выходной вал от знакопеременных инерционных вращающих моментов. Однако, для этого должно соблюдаться условие
Jл tg2 α л=Jбxtg2 αб, где Jл - момент инерции лопастей с присоединенными массами;
Jб - момент инерции балансировочного груза;
αл - угол между наклонной частью сателлитного вала и осью вращения этого вала;
αб - угол между осью штыря 18 и осью вращения сателлитного вала.
При соблюдении приведенных условий инерционные моменты сил, действующие на сателлитную шестерню относительного ее оси вращения, создаваемые действующими в плоскости вращения - силами со стороны балансировочного груза 20 через штырь 18 и со стороны лопастей через промежуточный элемент 12 и наклонную часть 13 сателлитного вала 14, равны по величине и противоположны по направлению, т.е. зубья шестерен разгружаются от инерционных сил.
Введенный в машину противовес 17 уравновешивает центробежные силы от шестерни 16 с присоединенными к ней массами, уравновешивание вращающихся масс относительно оси сателлита 14 осуществляется известными способами.
Вращающиеся вокруг сателлитного вала массы при вращении самого сателлитного вала вместе с выходным валом создают на подшипниках сателлитного вала 15, через выходной вал на корпус, вращающийся гироскопический момент, который уравновешивается гироскопическим моментом от второго сателлитного вала с вращающимися массами. Для этого оси сателлитов устанавливаются в одной плоскости, а направление вращения сателлитов - противоположное путем установки сателлитных шестерен 16 обоих механизмов одной стороны от оси вращения лопастей при симметричной установке шестерен 21.
Инерционные моменты с каждой пары лопастей со своим балансировочным грузом равны и противоположны по направлениям действия и уравновешиваются на выходном валу с помощью соединительной муфты 7.
Схема работы сохраняется для всех последующих вариантов конструктивных схем машины со следующими отличиями.
В варианте 2 (фиг. 2) введенный в конструкцию сферический шатун 22 взамен наклонной части сателлитного вала и промежуточного элемента 12 при вращении сателлитной шестерни 16 проворачивается вокруг штыря 18 и совершает вращательно-колебательные движения вокруг оси 10 ведущей вилки лопастей 3. Оптимальный угол между осями сателлитного вала 14 и осью вилки 10 составляет 90о. Оптимальный угол в плоскости сателлитной шестерни, между пальцами 23, взаимодействующими с балансировочным грузом 20, и штырями 18, взаимодействующими непосредственно или через элементы конструкции с ведущей вилкой лопастей, составляет 90о.
В варианте 3 (фиг. 3 и 4) штырь 18 сателлитной шестерни 16, которые может скользить и проворачиваться в прорези ведущей вилки, непосредственно воздействует на ведущую вилку лопастей, заставляя их совершать вращательно-колебательное движение относительно выходного вала.
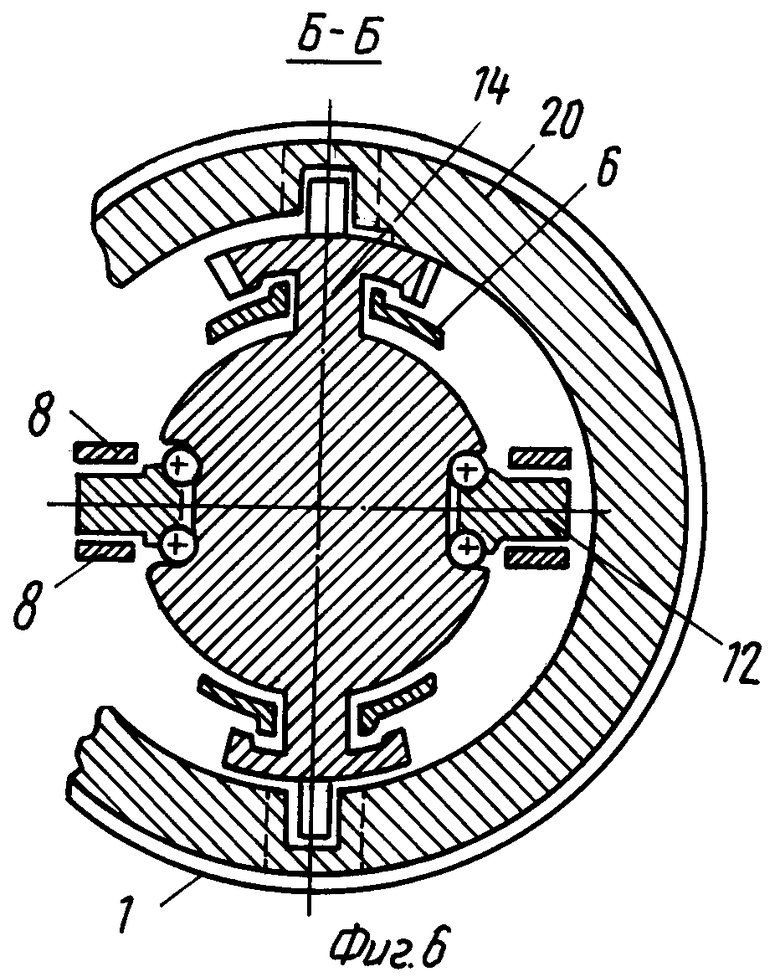
В варианте 4 (фиг. 5 и 6) колебания ведущей вилки 8 осуществляется за счет колебаний шарнирно скрепленного с вилкой промежуточного элемента 12, скрепленного с внешним кольцом подшипника 26, наклонно установленного внутренней обоймой на сателлитном валу.
В варианте 5 (фиг. 7) введенный в конструкцию сферический шатун 28 совершает вращательно колебательные движения относительно балансировочного груза с помощью цилиндрических выступов 27 и проворачивается относительно штырей 18 сателлитной шестерни 16. Оптимальный угол между осями цилиндрических выступов 27 и 18 составляет 90о.
В варианте 6 (фиг. 8 и 9) стержни 29, заделанные в сферический шатун, скользят и проворачиваются в направляющей корпуса, лежащей в плоскости, проходящей через сателлитный вал перпендикулярно выходному валу, а штыри 18 сателлитной шестерни и противовес проворачиваются в шатуне, а сам шатун является балансировочным грузом. Оптимальный угол между осями штырей 18 и стержнями 29 в плоскости сателлитной шестерни составляет 90о.
Сущность изобретения: каждый механизм качания лопастей снабжен кольцеобразным грузом, установленным в корпусе с возможностью вращения относительно оси вращения лопастей. Лопасти жестко соединены с ведущей вилкой, в подшипниках которой на оси, перпендикулярной оси вращения лопастей, установлен промежуточный элемент с возможностью вращения относительно наклонного участка сателлитного вала, выполненного в виде косого кривошипа. На одном конце сателлитного вала закреплена сателлитная шестерня, а на другом - противовес. Шестерня и противовес снабжены штырями, оси которых проходят через точку пересечения осей сателлитного вала и лопастей, входящими в прорезь груза. Прорезь расположена в плоскости, проходящей через ось вращения лопастей. Валы отбора мощности соединены между собой муфтой и образуют выходной вал. Оси сателлитной и неподвижной шестерен расположены в одной плоскости с обеспечением возможности противоположного вращения сателлитных валов. 5 з.п. ф-лы, 9 ил.
| УЛУЧШЕННЫЙ ОБЖИМНОЙ ИНСТРУМЕНТ | 2006 |
|
RU2400324C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
