Изобретение относится к машиностроению, в частности к передачам вращательного движения большой мощности.
Известна зубчатая роликовая передача, содержащая зубчатые колеса с круговым профилем впадин, выполненных по винтовым линиям, зубья-ролики, установленные во впадины и торцовые сепараторы, расположенные с двух сторон колеса для удержания зубьев-роликов, изогнутых по винтовой линии, повторяющей пространственную форму впадин.
Недостатками известной передачи являются повышенные осевые усилия, вызванные изогнутостью роликов по винтовой линии, обеспечивающей им ввинчивание в сопряженные винтовые поверхности зубьев, с ответными осевыми усилиями со стороны торцовых сепараторов. Известная передача имеет низкий коэффициент перекрытия за счет большой разности зубьев во внутреннем зацеплении и высокой жесткости сплошных роликов. Установка роликов
на сателлитах повышает виброактивность, шумовой эффект и динамические нагрузки в зацеплении. Отмеченные недостатки также снижают нагрузочную способность, неравномерность передаточного отношения, повышают износ и энергетические потери.
Известен также редуктор, с соосными входным и выходным валами, установленными друг против друга двумя зубчатыми венцами. Эксцентрично установленная шестерня входит в зацепление с обоими венцами. Один из венцов соединен с корпусом, другой с выходным валом. Шестерня свободно установлена на колене, наклоненном относительно валов и одновременно входит в зацепление с обоими венцами.
Внутреннее зубчатое зацепление с малой разностью зубьев имеет склонность к интерференции. Наклон оси шестерни относительно оси редуктора вносит существенное отклонение активных поверхностей зубьев от теоретически определенных форм. Искажение зубчатого зацепления выи
Ё
VI
ел
CJ
о
зывает непостоянство передаточного отношения, шум и вибрацию, повышает склонность к интерференции второго рода и заклиниванию, резко снижает нагрузочную способность редуктора. Поэтому противопоставленный редуктор предназначен для работы в мало нагруженных кинематических цепях, не требующих высокой стабильности заданного передаточного отношения.
Наиболее близким техническим решением является прецессионная передача, в которой конические ролики свободно размещены между коническими зубьями центральных колес и сателлита. При необходимости одно из зацеплений можно изготовить с одинаковым числом зубьев.
Вход роликов в зацепление и выход из него в известной передаче осуществляется в радиальном направлении одновременно по всей длине ролика. Это приводит к жестким ударам, так как зубья имеют повышенную жесткость ввиду малой высоты, а сплошные ролики не снижают жесткость зацепления. Монтажные и технологические погрешности второй ступени прямо передаются ведомому валу, увеличивая кинематические погрешности передачи в сотни и тысячи раз относительно ведущего звена, т.е. в число раз, равное передаточному отношению. Кинематические погрешности ведомого вала пропорциональны передаточному отношению, что заметно ограничивает кинематические возможности передачи. Известная передача обладает повышенной сложностью в изготовлении, низкой нагрузочной способностью.
Цель изобретения - снижение коэффициента неравномерности вращения ведомого вала путем повышения плавности зацепления за счет направленного по длине ввода роликов в зацепление. -
Указанная цель достигается тем, что планетарная прецессионная передача, содержащая корпус, ведущий и ведомый валы, связанное с ведущим валом водило, установленный на последнем двухвенцовый сателлит с коническими зубчатыми венцами, неподвижное и подвижное центральные колеса с коническими зубчатыми венцами и ролики, размещенные в зубьях последних, ролики выполнены цилиндрическими, а конические венцы центральных колес и сателлита выполнены прямозубыми с цилиндрическими впадинами для взаимодействия с роликами.
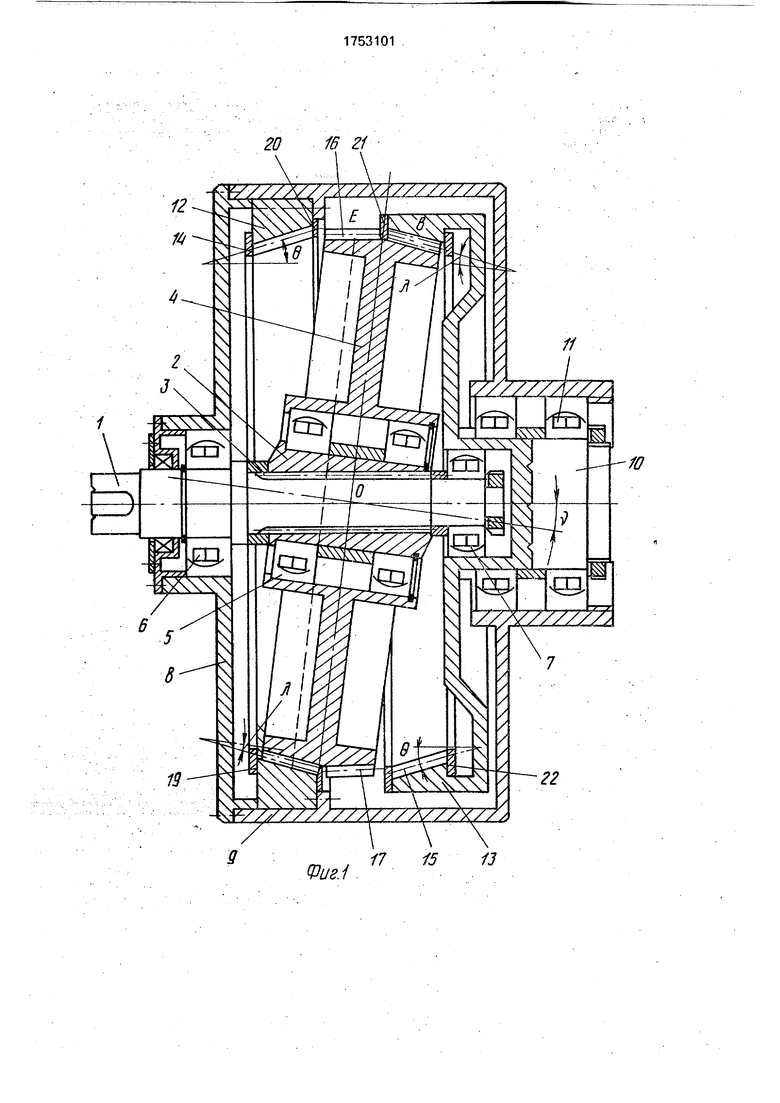
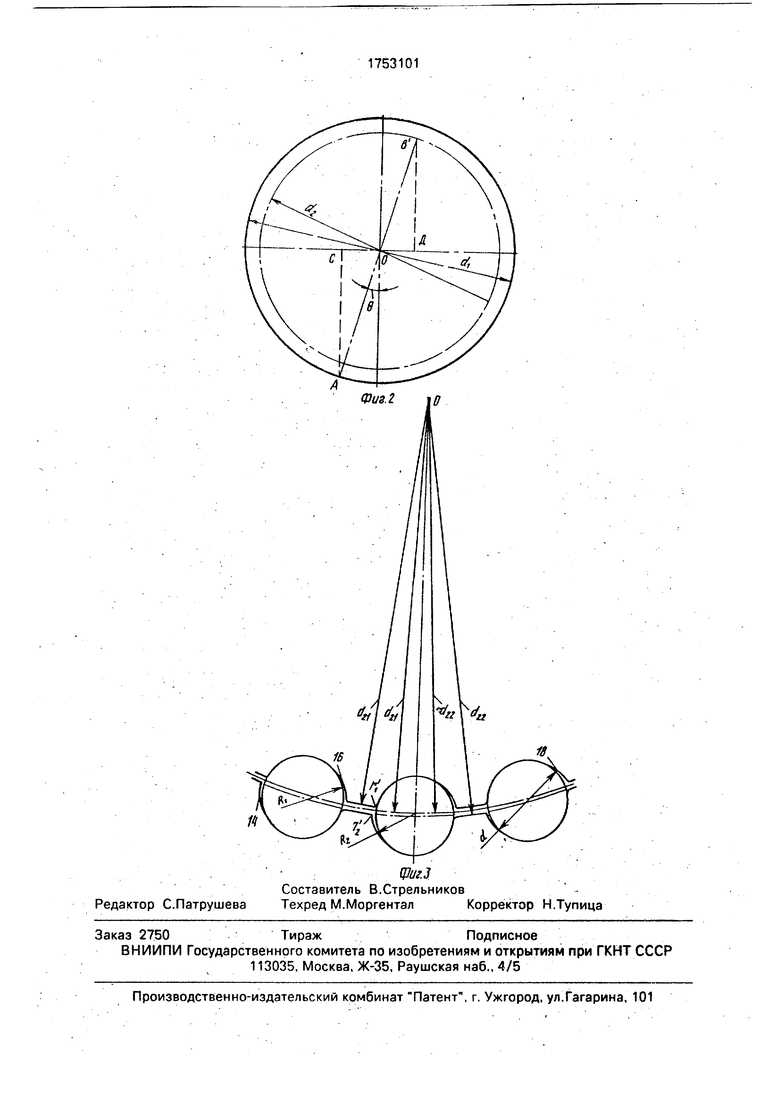
На фиг.1 представлена планетарная прецессионная передача, разрез; на фиг.2 - расчетная схема к определению параметров прецессионной передачи; на фиг.З - расчетная схема зацепления планетарной
прецессионной передачи в нормальном сечении.
Планетарная прецессионная передача содержит ведущий вал 1 с закрепленным на
нем водилом 2 с помощью шлицевого соединения 3, оси вала 1 и водила 2 пересекаются под небольшим углом v до 15-20° в центре сферического движения О двухвенцового сателлита 4, установленного на водиле 2 с
возможностью относительного вращения на подшипниках 5. Вал 1 установлен на подшипниках 6 и 7, закрепленных на крышке 8 корпуса 9 и ведомое валу 10, установленного на подшипниках 11. Неподвижное центральное зубчатое колесо 12 закреплено на корпусе 9, подвижное центральное зубчатое колесо 13 выполнено совместно с ведомым валом 10. На конических поверхностях центральных колес 12, 13 выполнены прямые
зубья 14, 15. Углы образующих конических поверхностей обоих колес 0 одинаковы. Конические поверхности зубчатых венцов 16 и 17 сателлита 4 имеют одинаковые углы образующих А и прямые зубья. Углы наклона
образующих конических поверхностей в центральных колес 12 и 13 равны сумме углов наклона образующих конических поверхностей Я зубчатых венцов сателлита и его оси v
.
Прямые зубья на конических поверхностях центральных колес 12 и 13 и венцов 16
и 17 сателлита 4 сформированы цилиндрическими поверхностями единичным профилированием или обкаткой в форме цилиндрических впадин для взаимодействия с цилиндрическими роликами 18, размещенными в зубьях 14 и 15 центральных колес и закрепленными от выпадания с торцов сепараторами 19-22. Наклон оси сателлита в совокупности с прямозубыми коническими венцами колес и сателлита
обеспечивает непрерывное зацепление цилиндрических впадин-зубьев 16 и 17 сателлита с цилиндрическими роликами 18. Ввод последних в зацепление направлен подлине.
Планетарная прецессионная передача работает следующим образом.
Ведущий вал 1, вращающийся с угловой скоростью (через втулку 2 сообщает сферическое движение сателлиту 4, При этом
зубья 16 сателлита плавно вводятся в зацепление по длине ролика 18 в их осевом направлении, обеспечивая плавное обкатывание сателлита 4 по неподвижному центральному колесу 12 посредством роликов
18, установленных на зубьях 14 центрального колеса. Угловая скорость вращения сателлита ftM относительно оси редуктора
21 -Z2 (04 Ю1 --
где zt,z2- соответствующие числа зубьев 16 и 14. Направление вращения сателлита совпадает с направлением вращения ведущего вала. В процессе сферического движения сателлита его зубья 17 также плавно входят в зацепление по длине роликов 18 в их осевом направлении.-Ролики 18 передают усилия зубьям 15 центрального колеса 13, вращая последнее с постоянной угловой скоростью У2
j izalte + zil
QJ2
Z1 Z4
Передаточное отношение планетарной передачи
U
Z1 -Z4
( Z1 - Z2 ) ( Z2 + Z4 )
где Z4 - число зубьев 15.
Направленный по длине ввод роликов в зацепление многократно снижает скорости сближения сопряженных поверхностей, направленные по их общей нормали, по сравнению с известными передачами, обеспечивая высокую плавность работы и постоянство передаточного отношения. Выполнение венцов центральных колес и
сателлита прямозубыми с ответными цилиндрическими впадинами для взаимодействия с цилиндрическими роликами обеспечивает свободный направленный подлине вход роликов в зацепление, исключая заклинивание и удары. Это также позволяет каждому ролику длительное время находиться в зацеплении, повышая стабильность передаточного отношения и нагрузочную
способность передачи. Цилиндрические ролики и прямые зубья с ответными цилиндрическими впадинами отличаются высокой технологичностью и точностью воспроизведения, положительно влияют на снижение
коэффициента неравномерности вращения ведомого вала.
Формула изобретения Планетарная прецессионная передача,
содержащая корпус, ведущий и ведомый валы, связанное с ведущим валом водило, установленный на последнем двухвенцовый сателлит с коническими зубчатыми венца- ми, неподвижное и подвижное центральные колеса с коническими зубчатыми венцами и ролики, размещенные в зубьях последних, отличающаяся тем, что с целью снижения коэффициента неравномерности вращения ведомого вала путем
повышения плавности зацепления за счет налравленного по длине ввода роликов в зацепление, последние выполнены цилиндрическими, а конические венцы центральных колес и сателлита выполнены
прямозубыми с цилиндрическими впадинами для взаимодействия с роликами.
г/
#
гг
atуглсь
&
Я 91
| название | год | авторы | номер документа |
|---|---|---|---|
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА С УСТРОЙСТВОМ НЕЙТРАЛИЗАЦИИ РАДИАЛЬНОЙ НАГРУЗКИ ОТ КОНТАКТИРУЮЩИХ ЗУБЬЕВ | 2017 |
|
RU2668451C1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ СООСНЫМИ ВЫХОДНЫМИ ВАЛАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2016 |
|
RU2729324C2 |
| УСТАНОВКА ВЫСОКОМОМЕНТНОГО РЕДУКТОРНОГО ТУРБОБУРА | 2011 |
|
RU2456425C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 1999 |
|
RU2160401C1 |
| БЕЗВОДИЛЬНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2011 |
|
RU2463499C1 |
| ПЛАНЕТАРНАЯ ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 2018 |
|
RU2706410C1 |
| Планетарный прецессионный редуктор | 1991 |
|
SU1825914A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВАРИАТОР | 2010 |
|
RU2457379C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ | 1992 |
|
RU2089770C1 |
Использование: машиностроение. Планетарная прецессионная передача содержит корпус, ведущее водило, двухвенцовый сателлит с коническими зубчатыми венцами, неподвижное и подвижное центральные колеса с коническими зубчатыми венцами и ролики. Конические венцы сателлита и центральных колес выполнены прямозубыми с цилиндрическими впадинами, а ролики - цилиндрическими для взаимодействия с последними. 3 ил.
I0lЈ9it
11
| Зубчатая роликовая передача | 1987 |
|
SU1557394A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| кл | |||
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
| Бостан И.А | |||
| Зацепление для прецессионных передач | |||
| Кишинев: Штиинца, 1983, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
