Изобретение относится к области машиностроения и может быть применен в приборостроении, станкостроении, во всевозможных видах транспорта, в системах автоматического регулирования, в дистанционном и программном управлении процессами ядерной промышленности, в роботах и манипуляторах, а автоматике управляемых летательных обьектов, космических аппаратов, в подводных лодках, торпедах без применения специальных средств щумо- по- давления.
Целью изобретения является повышение долговечности, надежности, мощности, передаваемого момента, увеличение работоспособности в особых условиях и расширение областей применения планетарного прецессионного редуктора.
Поставленная цель решаете ,тем, что зубчатое зацепление, в обычном понимании, заменено на зубчатое сферическое зацепление. Но этого недостаточно. Важным,
основным является то. что сферические зубья выполнены упруго-деформируемыми. При стальных сплошных зубьях (т.е.сталь- ных шарах) мы ожидаемого эффекта не получим. Существенное в том, что один зуб (группа зубьев) не имеют возможность упругой деформации. Но вся передача получается кинематической точной безлюфтовой передачей, способной передавать большие нагрузки, ибо усилие передается (распределяется) по значительной площади сферической оболочки. Кроме того, налицо деформирующие свойства передачи. К тому же, трудности изготовления мелкомодульного конического зацепления (т 0,8 мм) при угле делительных конусов р 90° снимаются заменой его на специальное, сборное крупномодульное зацепление (Лри и р 90°), зубья которого выполнены из сферических винтовых пружин м расположены в соответствующих сферических впадинах взаимодействующих шестерен.
Ј
СО
Ю СЛ Ю
В результате устраняются недостатки прототипа и повышаются технические характеристики ППР. К ним относятся:
-количество конических ступеней 2;
-передаточное отношение может быть больше и меньше 103(1%103):
-модуль зубчатого зацепления при угле делительных конусов р 90°, без применения специальных импортных зубодол- бежных станков;
-максимальное тяговое усилие на выходе РВЫХ 5: 100 кгс;
-высокая точность (до угловых минут на управляющий импульс);
-эффективность 80000-100000 гсм/кг;
-расширен диапазон по мощности от 100 Вт до 1000 КВт и по скорости;
-повышена работоспособность в условиях радиации, вакуума, на дне океана, в агрессивных средах, инерционных и вибрационных нагрузок.
Тем самым расширена область применения редуктора ППР в приводах высокоточных систем навигации, роботов-манипуляторов, летательных аппаратов, транспортных средств, повышена их надежность, точность, экономичность и технологичность.
Повышен ресурс работы, КПД редуктора, снижена его металлоемкость, стали ненужными дорогостоящие импортные станки, расширено использЪвание ППР в приборной технике, роботах-манипуляторах, кибернетике, в промышленности и на транспорте.
Возможен выигрыш по весам и габаритам редуктора при лучших энергетических характеристиках, достигаются большие пе- редаточн ые отношения при одной паре зацепления.
Отсутствие всевозможных люфтов, возросшая точность передаточного отношения, бесшумный и безударный характер работы ППР (пружинный ротор выполняет роль демпфера), при сокращении весов и габаритов, упруго-деформируемое зацепление пружинного ротора делает предлагаемую конструкцию весьма перспективной для работы в экстремальных условиях: в вакууме, на дне океана, при радиации, ППР допускает перегрузки по моменту на выходе системы без поломок и разрушения редуктора. При воздействии активной нагрузки, превышающей расчетную, данная конструкция позволяет восстанавливать свои функциональные свойства. Это достигается за счет упругого звена, в виде пружинного ротора, которое выполняет функции сглаживающего фильтра.
Замена эвольвентного профиля зубьев передачи сферическими зубьями достигается за счет применения в качестве зубьев винтовых сферических пружин с определенной навивкой витков, допускающих упругую деформацию зубьев - пружин и с вогнутым
профилем зубьев на статоре (неподвижной шестерне) и других подвижных шестернях повторяющих сферический профиль зубьев - пружин ротора.
Сферический профиль зуба, при прочих
равных условиях работы привода, дает наименьший износ как профиля впадин шестерен, так и зубьев-пружин. Это объясняется равномерным распределением по сфере усилий и. следовательно, меньшей величи
ной контактных напряжений сжатия между
взаимодействующими зубьями-пружинами и впадинами шестерен.
На фиг. 1-3 показано устройство планетарного прецессионного редуктора (ППР).
в неподвижном корпусе - 1 закреплена шестерня - 2 статора. Под статором понимается общая сборка корпуса с неподвижной шестерней - 2. Соосно со статором в корпусе (по оси ее) расположены на подшипниках 8,9.11 ведущий вал с водилом в виде косого кривошипа - 7 и ведомый вал с шестерней - 10, соединяемой с нагрузкой. В сферических впадинах шестерен 2 и 10 упруго расположены сферические упругодеформируемые зубья - пружины - 3, которые в этом положении зафиксированы с помощью колец - 4. Ведущий вал - 7 соосно со статором шлицевым или другим соединением соединяется с первичным двигателем
(электрическим, гидравлическим, пневматическим и т.д.).
На водиле в виде косого кривошипа - 7 с угловым эксцентриситетом - о. по оси 0-0 расположен подшипник - б, при помощи которого сателлит (прецессионное колесо) - 5 также подвижно и с угловым эксцентриситетом а- расположен относительно оси ее, обеспечивая тем самым постоянное контактирование его со сферическими зубьямипружинами, расположенными в соответствующих впадинах шестерен 2 и 10.
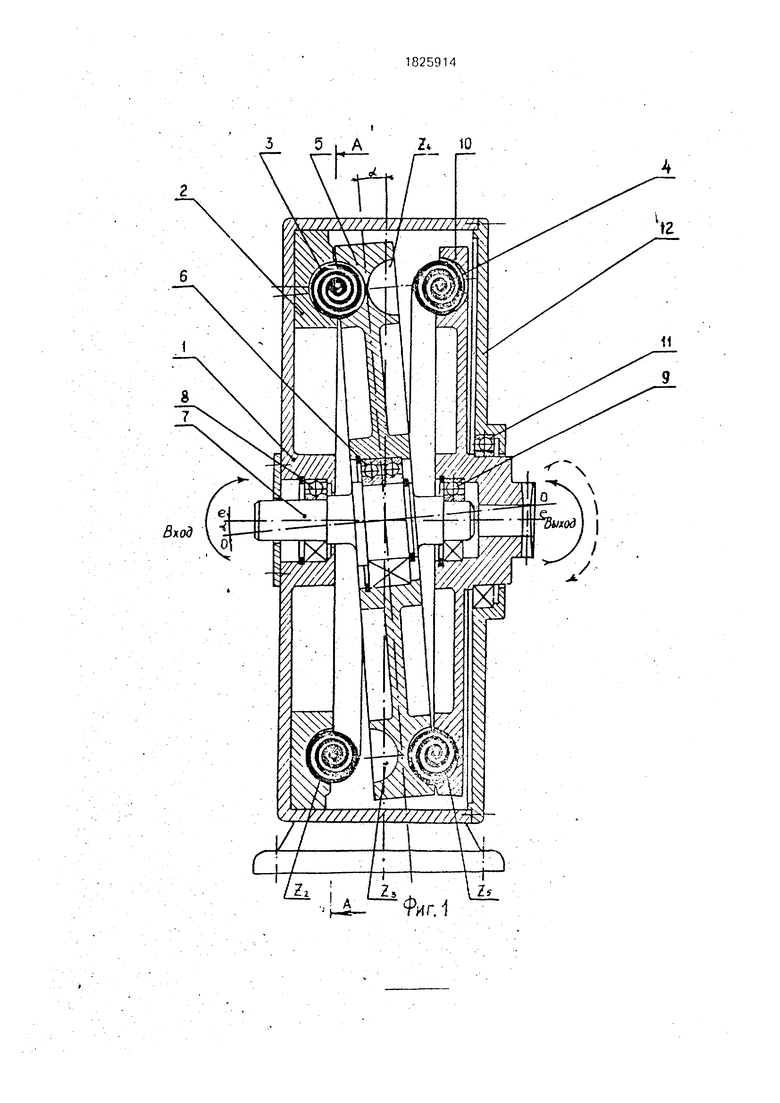
В качестве силового подшипника - 6 нами выбран 2-х рядный силовой подшипник. На фиг.2 изображен образец ППР в
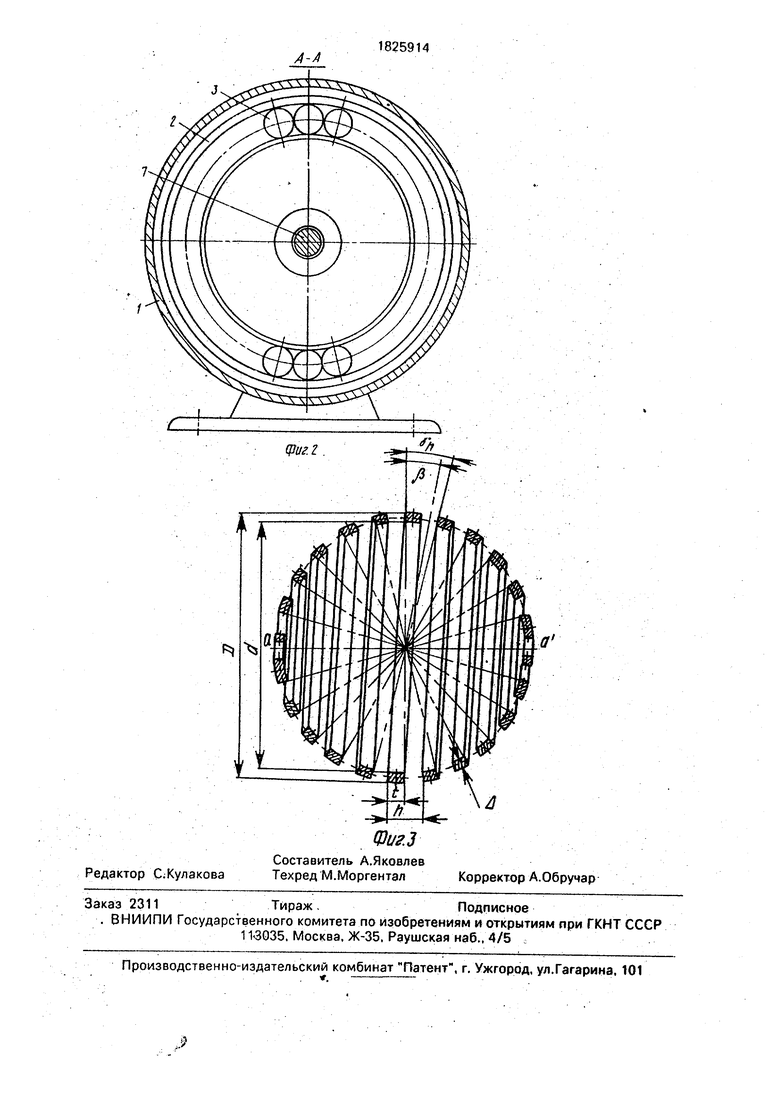
поперечном разрезе по А-А. на фиг.З сферический зуб-пружина и его геометрические параметры в масштабе М2:1: а-а - центральные крепежные отверстия; D, d - наружный и внутренний диаметры зуба-пружины; h,
h,/3- линейный, угловой и технологический шаги зуба-пружины; t. А- ширина и высота витка пружины.
Редуктор ППР работает следующим образом. -Под действием первичного двигателя ведущий вал с водилом в виде косого кривошипа - 7 заставляет сателлит - 5 обкатываться по зубьям-пружинам 3,4 шестерен 2, 10, обеспечивая тем самым поочередное и одновременное контактирование зубьев- пружин с впадинами неподвижной шестерни в корпусе и шестерни ведомого вала. За счет разности в числе зубьев Za. Zs и в числе впадин Z3 и Z4 происходит вращение выходного-вала со скоростью, определяемой пе- редаточным отношением
в/в М ведомого вяла (выходного)-
ft входа
Для рассматриваемого нами реверсивного образца ППР с одной 2-х сторонней зоной деформации передаточное отношение определяется зависимостью
Z.4
2з Z5
Zs - Z2 Z4
Расчетом определены оптимальные значения 22. Za, Z4, Zs, при котором I max. Знак передаточного отношения определяет направление вращения ведомого (выходного) вала. Конструкция ППР реверсивна. Так, для изготавливаемого образца ППР принято: Z2-24, 2-л 25, Z4 26, Zr -25. В этих уело- виях .
Образец ППР выполняется с одной 2-х сторонней зоной деформации, ибо при этом конструкция получается проще, обеспечи- адется наибольшее передаточное отноше- ние при неизменном числе зубьев шестерен и сателлита (ротора и статора), достигается достаточно большая зона контактирования между зубьями и впадинами, которая доходит до 1/3 зубчатого зацепления. Одновре- менно нужно отметить, что конструкция ППР работоспособна как при использовании механического генератора волн, так и любого другого: электромагнитного, гидравлического, пневматического и т.п.
Предварительные испытания модификаций ППР подтверждают его преимущества:
-плавность и бесшумность работы, т.е. передача мощности происходит без ударов, толчков и вибраций;
-эластичность и отсутствие люфтов в конструкции обеспечивают лучшую воспринимаемость динамических воздействий по сравнению с обычными зубчать , переда- чами;
-прогрессивно равномерное распределение нагрузки между зубьями и впадинами, поскольку в работе участвуют до 1/3
5 10
15
0
5 0
5 0 5
0
5
общего числа зубьев н упруши чр-чмер деформирования зубьев пп впляел распределить нагрузку между ясями ту гп-ямм. участвующими в зацеплении.
-быстроходность и вигпспи КПД передачи;
-компактность и просила конструкции при значительных передаваемых мощностях;
-возможность получения больших передаточных отношений всего лишь при двух парах зацепления:
-высокая кинематическая точность передачи, возможность получения беззазорных реверсивных приводов;
-соосное расположение ведущего и ведомого валов;
-технологичность конструкции и ее изготовления.
В предлагаемой конструкции ППР упру- годеформируемый сферический зуб-пружина контактирует с вогнутым сферическим профилем впадин неподвижной шестерни и шестерни ведомого вала. Контакт между зубьями при деформации происходит по сфере, которая существенно увеличивается, за счет упругости самого зуба-пружины. Следовательно, нагрузка воспринимается не узкой полоской, как при эвольвентном зацеплении, а большей поверхностью сферы зуба. Этим достигается более равномерное распределение нагрузки, что позволяет увеличить мощность при меньших габаритах конструкции. Внутренний характер зацепления у ППР благоприятствует увеличению зоны зацепления до 100° при одной волне деформации, тем самым обеспечивается безлюфтовое, демпферное соединение нагрузки с первичным двигателем.
Предлагаемая конструкция отличается высокой технологичностью и не требует высокоточных зубодолбежных станков. Геометрия вогнутого сферического зуба на неподвижной шестерне и шестерне выходного вала наиболее удобна для прогрессивных форм обработки: прессования, порошковой и литейной металлургии, обработка взрывом, давлением и т.д. Навивка сферических зубьев-пружин также является высо- котехнологическим процессом и освоена промышленностью.
Технологичность изготовления предлагаемого зацепления, практически идеальная гладкая поверхность с уплотненным и термообработанным верхним слоем пружинных зубьев совместно со шлифованными (выдавленными) вогнутыми впадинами шестерен при правильном выборе контактирующих пар обеспечивают весьма высокое КПД передачи (порядка 0,8). Этому благоприятслвует и упругий характер работы зубьев ротора, поскольку при работе ППР небольшие колебания зубьев уменьшают коэффициент трения и снижают общие потери в зубчатом сцеплении.
Существенны преимущества ППР и с точки зрения характера упругих деформаций гибких зубьев-пружин.
В обычных конструкциях волновых передач упругая деформация цельной гибкой шестерни требует значительных усилий и связана с деформацией всего зубчатого стакана; все это ограничивает мощность передаваемых нагрузок. В предлагаемой конструкции радиальная деформация зубьев-пружин (их сжатие) не требует значительных усилий и носит локальный характер и в значительной степени распределяется между рядом зубьев. В машиностроении довольно редко встречаются условия работы винтовых пружин с такими минимальными, порядка десятых долей мм, деформациями. При таком виде деформация пружин вызывает рабе .-у витков пружины на закручивание и изгиб. Расчет напряжений, возникающих в винтовых сферических зубьях-пружинах, показывает, что они существенно меньше напряжений, возникающих при деформации непружинных зубьев зубчатого упруго- деформируемого стакана (шестерни) у волновых редукторов. Последнее позволяет повысить надежность и ресурс работы ППР.
Исходя из возможных условий работы конструкции (в высокотемпературной среде, в вакууме, в химически активной и радиационной средах и т.д) основные детали ППР, такие, как зубья-пружины, могут быть выполнены из высокотемпературных, специальных сплавов типа 50ХФА и др, что значительно расширяет области возможного применения предлагаемой конструкции. Корпус ППР из алюминиевого сплава.
Экспериментальные исследования данного вопроса показывают. Во-первых, сателлит ППР целесообразно выполнять сборным из чашек с выштампованными сферическими впадинами для расположения и взаимодействия их со сферическими зубьями-пружинами, Производство такого вида зацепления со сферическими впадинами и технологичнее, и значительно дешевле обычных зубодолбежных работ.
Кроме того, сферическая зубчатая впадина - это, по существу, сферическая обо- лочка, у которой внутренние усилия более равномерно распределяются по сфере, а
главное, сочетают значительную жесткость и прочность со сравнительно малой массой. Далее, сферические зубья-пружины технологичнее и эффективнее выполнять в виде прессованных шаров с центральным
отверстием для соединительного кольца. Эксперимент показывает, что наилучшие результаты дает прессование зубьев-шаров из низколегированной нержавеющей стали с диаметром проволоки d -0,1 мм.
После соответствующей термообработки и пропитки такие зубья-шары позволяют передавать значительные нагрузки на зубья-впадины при равномерном их распределении, демпфировать ударные и динамические перегрузки, которые порою носят активный характер. Это наиболее важно при передаче значительных моментов и мощностей в экстремальных условиях Формула изобретения
1. Планетарный прецессионный редуктор, содержащий корпус, ведущий с косым кривошипом и ведомый валы, установленные на них неподвижное зубчатое колесо, подвижное зубчатое колесо и двухвбнцовый
сателлит для взаимодействия с последними, отличающийся тем, что, с целью повышения долговечности, мощности и передаваемого момента, зубья венцов сателлита выполнены в .виде сферических
впадин, зубья зубчатых колес - в виде сферических впадин с закрепленными в них по делительному диаметру последних винтовыми сферическими пружинами.
2.Редуктор по п. 1,отличающийся тем, что профили впадин зубчатых колес и
сателлитов выполнены с модулем больше 1.
3.Редуктор по п.2,отличающийся тем, что винтовые сферические пружины имеют центральное отверстие и закреплены
в сферической впадине упругим кольцом,
4.Редуктор по п.З, отличающийся тем, что винтовые сферические зубья выполнены прессованием из проволоки диаметром 0,1 мм.
5. Редуктор поп. 4, отличающийся тем, что зубчатые колеса и сателлит выполнены штамповкой.
cr/
1Г CN 00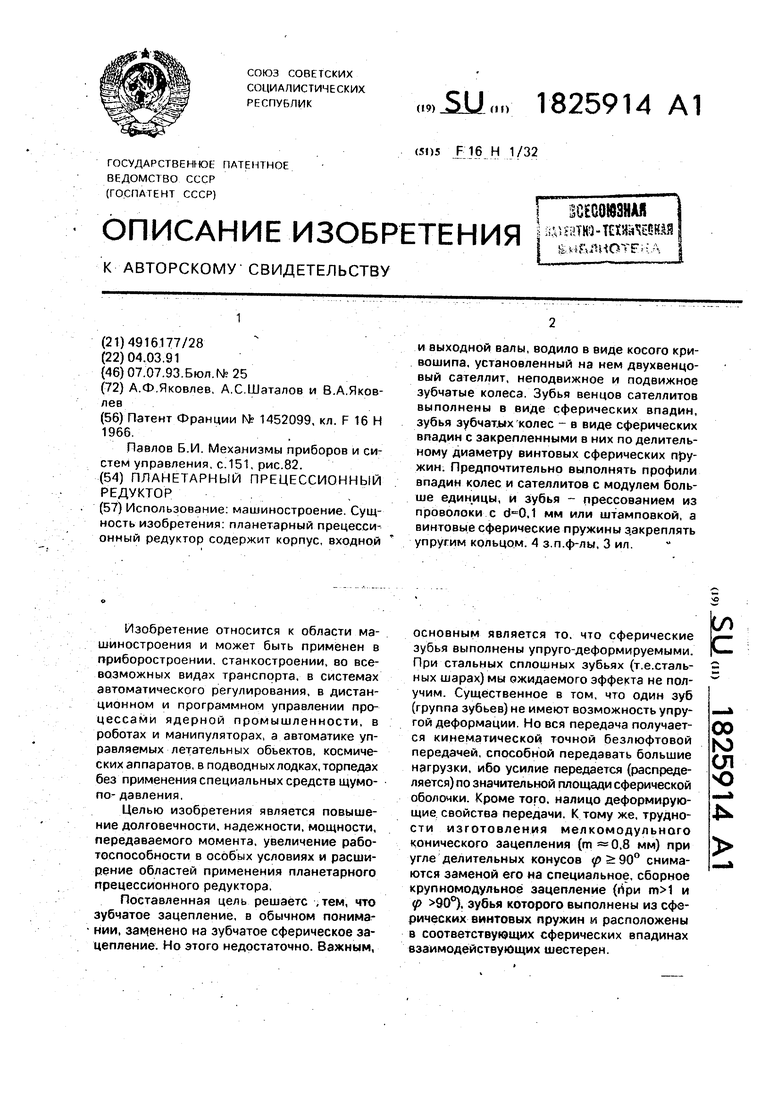



| название | год | авторы | номер документа |
|---|---|---|---|
| Планетарная прецессионая передача | 1988 |
|
SU1753101A1 |
| СООСНЫЙ РЕДУКТОР | 2013 |
|
RU2529943C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР ПОВЫШЕННОЙ МОЩНОСТИ ПЦР ПМ | 2003 |
|
RU2251038C2 |
| ЦИКЛОИДАЛЬНО-ЦЕВОЧНАЯ ПЕРЕДАЧА | 2007 |
|
RU2338102C1 |
| ЭЛЕКТРОПРИВОД НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА С УПРУГИМ ЗАЦЕПЛЕНИЕМ - ЭП ПЦР-У | 2007 |
|
RU2358375C2 |
| ПЛАНЕТАРНАЯ ПРЕЦЕССИОННАЯ ПЕРЕДАЧА | 1991 |
|
RU2029170C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ КОМПЛЕКС ЭЛЕКТРОПРИВОДОВ НА БАЗЕ ПЛАНЕТАРНОГО ЦИКЛОИДАЛЬНОГО РЕДУКТОРА - МКЭ ПЦР | 2008 |
|
RU2452883C2 |
| Пневматическая бурильная машина | 1975 |
|
SU615205A1 |
| ЛЕБЕДКА | 1995 |
|
RU2099276C1 |
| Бесшатунный механизм | 2023 |
|
RU2805423C1 |
Использование, машиностроение. Сущность изобретения: планетарный прецессионный редуктор содержит корпус, входной и выходной валы, водило в виде косого кривошипа, установленный на нем двухвенцо- вый сателлит, неподвижное и подвижное зубчатые колеса. Зубья венцов сателлитов выполнены в виде сферических впадин, зубья зубчатых колес - в виде сферических впадин с закрепленными в них по делительному диаметру винтовых сферических пружин. Предпочтительно выполнять профили впадин колес и сателлитов с модулем больше единицы, и зубья - прессованием из проволоки с .1 мм или штамповкой, а винтовые сферические пружины закреплять упругим кольцом. 4 з.п.ф-лы, 3 ил.
| Патент Франции N 1452099, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Павлов Б.И | |||
| Механизмы приборов и систем управления, с.151, рис.82 | |||
