Изобретение относится к измерительной технике и предназначено для использо- вания в системах контроля уровней собственной вибрации объектов, имеющих вертикальное рабочее положение, большое отношение длины к диаметру и значительную массу, например, погружных электродвигателей, электробуров и т.д.
Известны виброизолирующие подвески для размещения объектов при контроле вибрации, включающие опору, упругий элемент, расположенный выше или ниже точек закрепления контролируемого объекта на опоре. Датчики измерения вибрации устанавливаются на фланце объекта или на самом объекте в направлении, перпендикулярном опорной поверхности, в точках вблизи мест крепления, или на корпусе машин вблизи подшипниковых щитов (ГОСТ 12379-75. Машины э;.ектрические вращающиеся. М.: Изд-во стандартов, 1976, разд.З; авт.св, СССР № 281840, кл. 42 с 42, 1969). Однако предложенные устройства затруднительно использовать для определения с заданной точностью собственной вибрации объектов, имеющих большое отношение длины к диаметру и значительную массу.
Наиболее близкой к заявляемой по технической сущности и достигаемому результату является конструкция виброизолирующей подвески, используемой в балансировочном устройстве по авт.св. СССР № 337675, кл. G 01 М 1/02, 1970.
Известная виброизолирующая подвеска содержит корпус, связанную с ним посредством равномерно расположенных по его периметру упругих элементов опорную пяту, которая имеет средство для базирования измеряемого объекта и площадки, на которых размещены вибродатчики.
Недостатком известной конструкции является низкая чувствительность устройства к радиальной составляющей вибрационной энергии контролируемого объекта, что не позволяет с заданной точностью измерить уровень его собственной вибрации.
Кроме того, в устройстве не предусмотрена возможность самоцентрирования контролируемых объектов, что желательно при установке на опорную пяту объектов, имеющих вертикальное рабочее положение и большое отношение длины к диаметру.
Целью изобретения является повышение точности измерения.
Поставленная цель достигается тем, что в виброизолирующей подвеске, содержащей корпус, связанную с ним посредством равномерно расположенных по его периметру упругих элементов опорную пяту, которая имеет средство для базирования
контролируемого объекта и площадки для размещения вибродатчиков, в опорной пяте выполнено отверстие в форме концентричного обратного конуса, средство для базировакия контролируемого объекта выполнено в форме взаимодействующей с обратным конусом сферы, а площадки для размещения вибродатчиков расположены в плоскости линии сопряжения сферы и конуса.
0 Размещение вибродатчиков на опорной пяте в плоскости линии сопряжения сферы и конуса по радиусу обеспечивает все необходимые требования к измерению вибрации исследуемого объекта. В предлагаемой
5 конструкции виброизолирующей подвески за счет равномерно расположенных упругих элементов достигается равномерно распределенная жесткость опорной пяты в плоскости крепления контролируемого объекта к
0 подвеске.
Наличие в заявляемой конструкции средства базирования в виде сферы, взаимодействующей с обратным конусом опорной пяты, позволяет использовать его для
5 закрепления объекта в вертикальном, соответствующем рабочему, положении с заданной жесткостью и его самоцентрирование по типу физического маятника. Кроме того, при установке объекта со средством базиро0 вания на опорную пяту подвески конструктивно обеспечивается расположение линии контакта сферы с конусом в плоскости крепления контролируемого объекта. В этой же плоскости располагаются площадки под
5 вибродатчики, измерительные оси которых расположены по радиусам линии контакта. На чертеже представлено предлагаемое устройство. Виброизолирующая подвеска, например, для погружных элект0 родвигателей содержит корпус 1, опорную пяту 2, связанную с корпусом 1 посредством равномерно расположенных по его периметру упругих элементов, например пружин 3, и средство 4 базирования для установки
5 контролируемого объекта, например погружного электродвигателя 5. В опорной пяте 2 выполнено отверстие в форме концентричного обратного конуса, с боковой поверхностью 6 которого взаимодейст0 вует средство 4 базирования своей наружной поверхностью 7, выполненной в форме сферы. Угол наклона боковой конической поверхности б выбирается исходя из требований самоцентровки по типу физиче5 ского маятника контролируемого электродвигателя 5 в вертикальной плоскости под действием собственного веса и обеспечения оптимальных материалов и технологии изготовления. На наружной боковой цйлин- дрической поверхности опорной пяты 2 выполнены площадки 8 для установки вибродатчиков (не показаны), Центры площадок 8 располагаются в плоскости линии сопряжения поверхности 7 и поверхности 6 на взаимно перпендикулярных диаметрах линии контакта. При установке вибродатчиков на площадки 8 их главные геометрические оси, в направлении которых вибродатчики обладают максимальной чувствительностью, располагаются в горизонтальной плоскости на продолжениях взаимно перпендикулярных диаметров. Кроме того, средство 4 базирования имеет горизонтальную площадку 9 для крепления исследуемого объекта 5, располагаемую в одной плоскости с линией контакта сферы (7) и конуса (6).
Таким образом, при установке контролируемого объекта (5) со средством 4 базирования на опорную пяту 2 подвески и размещении вибродатчиков на площадках 8 главные геометрические оси вибродатчиков, линия взаимодействия конуса (6) и сферы (7) и плоскость крепления объекта (5) находятся в одной горизонтальной плоскости.
Некотррые пружины 3 снабжены направляющими пальцами 10, которые одновременно являются ограничителями максимально допустимого прогиба пружин 3. Количество пружин 3 определяется требованиями обеспечения заданной равномерной радиальной жесткости опорной пяты 2 в плоскости крепления контролируемого объекта (5), условиями прочности, зависящими от массы объекта, требованиями к значению собственной частоты колебаний объекта на виброизолирующей подвеске и др. Крепление пружин 3, опорной пяты 2 и корпуса 1, а также предварительное регулирование сжатия пружин 3 обеспечиваются, например, тремя стяжными болтами 11, которые установлены по периметру корпуса 1 под углом 120°. Болты 11 также являются направляющими пружин 3 и в отверстиях корпуса 1 установлены свободно. Пальцы 10 закреплены на корпусе 1 при помощи резьбового соединения. Корпус 1 жестко связан с обсадной трубой 12 испытательной скважины, а средство 4 базирования имеет транспортировочные рым-болты 13.
В процессе сборки электродвигатель 5 скрепляется со средством 4 базирования по площадке 9. В корпус 1 подвески устанавливаются и закрепляются пальцы 10, на которых затем располагают пружины 3. Пружины 3, кроме того, устанавливают на корпус 1 над отверстиями под болты 11. С целью обеспечения простоты и удобства сборки в корпусе 1 и опорной пяте 2 выполнены цековки для установки пружин 3.
Сверху на пружины 3 устанавливают опорную пяту 2, которую скрепляют с корпусом 1 болтами 11. При этом болты 11 свободно перемещаются через отверстия корпуса
1 и закреплены, например, на резьбе в опорной пяте, а также проходят внутри соответствующих пружин 3. Кроме того болтами 11 создается заданное начальное сжатие пружин 3.
0 Корпус 1, скрепленный с опорной пятой 2, неподвижно устанавливается на обсадную трубу 12 испытательной скважины. Затем электродвигатель 5 вместе со средством 4 базирования устанавливается не опорную
5 пяту 2. Под действием веса электродвигателя 5 средство 4 базирования устанавливается своей сферической поверхностью 7 в конусе (6) опорной пяты 2 и самоцентрируется так, что ось вращение электродвигате0 ля располагается в вертикальной плоскости. На площадки 8, например, на резьбе устанавливаются вибродатчики.
В процессе контроля вибрации элект родвигателя с помощью вибродатчиков со5 ставляющие собственной вибрации объекта передаются с минимальными потерями энергии вибрации, так как ось вращения электродвигателя 5 совпадает с продольной осью виброизолирующей под0 вески, где электродвигатель 5 самоцентрируется относительно обсадной трубы 12 и устанавливается вертикально, а главные геометрические оси вибродатчиков располагаются в плоскости крепления электродвигателя
5 5 и линии контакта сферы и конуса подвески. При этом пружины 3 обеспечивают заданную собственную частоту вибраций объекта в подвеске и снижают влияние вибрации обсадной трубы 12 испытательной скважины
0 на контролируемый объект.
Использование предложенной виброизолирующей подвески для контроля уровней собственной вибрации, например, погружных электродвигателей, длина кото5 рых достигает 7500. мм при максимальном наружном диаметре 130 мм и массе более 500 кг, позволяет обеспечить повышение точности измерений за счет выбора места установки вибродатчиков и условий крепле0 ния электродвигателя к подвеске.
Благодаря выполнению сопрягаемых поверхностей опорной плиты и средства базирования по типу конус-сфера, обеспечению равномерной жесткости опорной пяты
5 в осевом и радиальном направлениях и размещению вибродатчиков на опорной пяте в плоскости линии контакта сфера-конус обеспечивается максимальная чувствительность системы подвески к энергии собственных вибрационных колебаний. Подвеска
имеет простую конструкцию, не требуетту, которая имеет средство для базирования
больших площадей, что создает предпосыл-контролируемого объекта и площадки, на
ки для ее широкого использования при кон-которых размещены вибродатчики, о т л итроле вибрации объектов, имеющихч а ю щ а я с я тем, что. с целью повышения
большое отношение длины к диаметру и5 точности измерения, в опорной пяте выползначительную массу.нено отверстие в форме концентричного обФормула изобретенияратного конуса, средство для базирования
Виброизолирующая подвеска, содер-выполнено в виде взаимодействующей с обжащая корпус и связанную с ним посредст-ратным конусом сферы, а площадки
вом равномерно расположенных по его10 расположены в плоскости окружности сопериметру упругих элементов опорную пя-пряжения сферы и конуса.

| название | год | авторы | номер документа |
|---|---|---|---|
| Виброизолирующее устройство с автоматическим управлением | 1988 |
|
SU1716215A1 |
| ПРОСТРАНСТВЕННАЯ ВИБРОИЗОЛИРУЮЩАЯ ПОДВЕСКА | 2010 |
|
RU2447336C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ПОДВЕСКА ТРУБОПРОВОДА | 2017 |
|
RU2669981C1 |
| Способ определения коэффициента эффективности вибрационной защиты виброизолирующих муфт судовых дизель-генераторов | 2019 |
|
RU2730694C1 |
| ВИБРОПРИЕМНИК | 2001 |
|
RU2184941C1 |
| Устройство для установки погружного электронасоса в скважине | 1981 |
|
SU1019062A1 |
| Устройство для выполнения метрологических операций на объекте | 1987 |
|
SU1623573A3 |
| Стенд для виброиспытаний объектов | 1987 |
|
SU1420426A1 |
| АМОРТИЗАТОР ТРЕХКАСКАДНЫЙ С УПРУГОДЕМПФИРУЮЩИМИ ЭЛЕМЕНТАМИ | 2017 |
|
RU2668940C2 |
| ВИБРОИЗОЛИРУЮЩАЯ ПОДВЕСКА | 1970 |
|
SU281840A1 |
Изобретение относится к измерительной технике и может быть использовано при 2 4 V 76 хжизмерении уровней собственной вибрации контролируемых объектов, имеющих вертикальное рабочее положение. Цель - повышение точности измерения. Опорная пята 2 подвески связана с корпусом 1 посредством равномерно установленных по его периметру упругих элементов (пружин 3). В опорной пяте 2 имеется отверстие в форме концентричного обратного конуса. Средство установки и базирования контролируемого обьекта имеет сферическую поверхность, взаимодействующую с обратным, конусом отверстия опорной пяты 2. Вибродатчики установлены на площадках 8 опорной пяты 2, расположенных в плоскости линия сопряжения сферы и конуса. Положительный зф-| фект заключается в повышении точности измерения уровней собственной вибрации контролируемых объектов за счет равномерного распределения и максимальной передачи энергии собственных вибрационных колебаний объекта к вибродатчикам. 1 ил. 9 7 13 Ь сл GO ГО ю 4 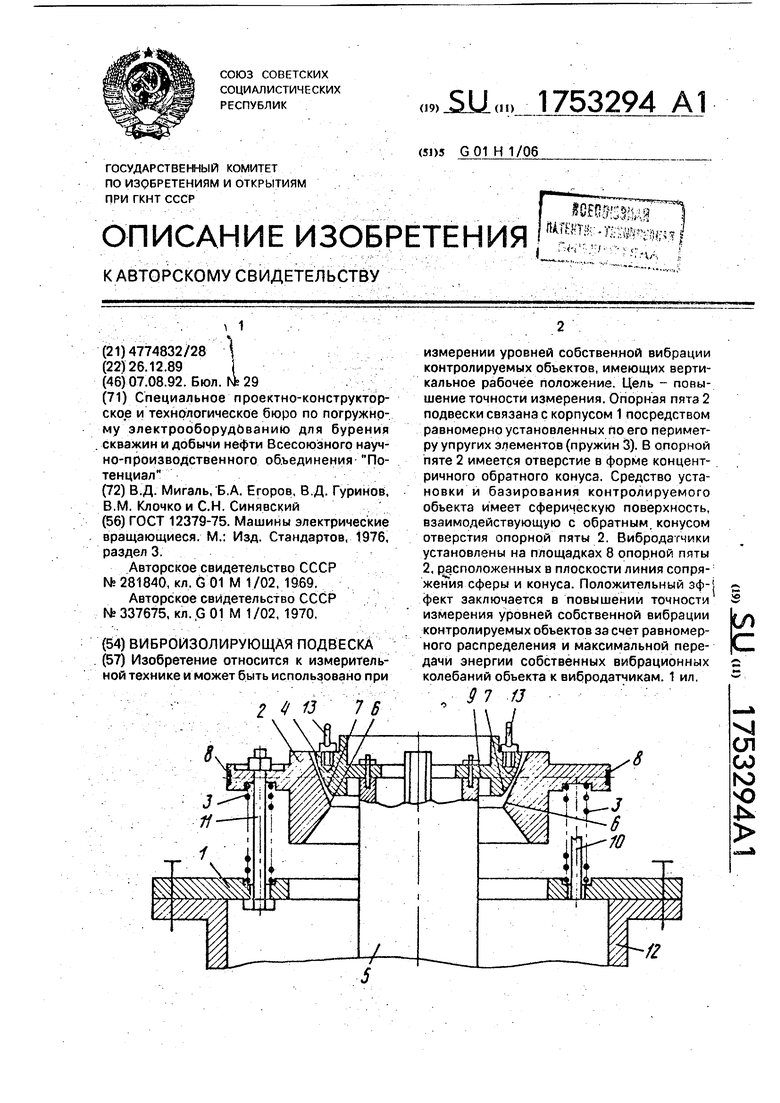
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1928 |
|
SU12379A1 |
| Машины электрические вращающиеся | |||
| М.: Изд | |||
| Стандартов, 1976, раздел 3 | |||
| ВИБРОИЗОЛИРУЮЩАЯ ПОДВЕСКА | 0 |
|
SU281840A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| БАЛАНСИРОВОЧНОЕ УСТРОЙСТВО'••''••^•"f^'Ul^l i..,;" • -.-•iii;; »^ SLftts--•;-•: О "'-КА ! | 0 |
|
SU337675A1 |
