Изобретение касается автоматичесокго управления позиционными механизмами и может быть использовано для управления установкой барабанов на заданные углы подачи раската и управления механизмами установки валков обжимной клети винтовой прокатки,
На фиг.1 приведена структурная схема предлагаемого устройства: нз фиг 2 - диаграмма работы устройства: на фиг 3 - структурная схема формирователя опорного напряжения,
Устройство для коррекции показаний датчика положения содержит генератор 1 тактовых импульсов, датчик 2 синусно-косинусного вращающегося трансформатора (СКВТ), включенный по схеме фззоврзщате- /I, синусная и косинусная обмогки которого через формирователь 3 фазового сдвига и первый нул ь-орган 4 соединены с D-входом первого О-триггера 5, С-вход которого соединен с первым выходом генератора 1 тактовых импульсов, а прямой выход - с D-входом второго D-триггера бис первым входом первого элемента И 7, второй вход которого соединен с инверсным выходом второ го D- триггера 6, третий вход - с третьим выходом генератора 1 тактовых импульсов и С-вхо- дом второго D-триггера б, а выход - с V-BXO- дом регистра 8 сдвига и K.l-входами IK-триггера 9 ,выход которого соединен с первым входом второго элемента И10, второй вход - с вторым выходом генератора 1 тактовых импульсов и С-входом регистра 8 сдвига и IK-триггера 9, а выход- с С-входом счетчика 11, выход которого соединен с D- входом регистра 12, С-вход которого соединен с первым выходом регистра 8 сдвига, второй выход которого соединен с R-входом счетчика 11, а зздзтчик 13 коррекции соединен с Ы+-входом дискриминатора 14, №- вход которого соединен с выходом реверсивного счетчика 15, R-вход которого соединен с выходом второго нуль-органа 16,
а суммирующий (+) и вычитающий (-) входы соответственно с выходами третьего и четвертого элементов И 17, 18, первые входы которых соединены с вторым входом генератора 1 тактовых импульсов, а вторые - соответственно с Ni N2, М1 Ыг-выходами дискриминатора 14, Н №-выход которого через одновибратор 19 соединен с 1-входом 1 -триггера 9,
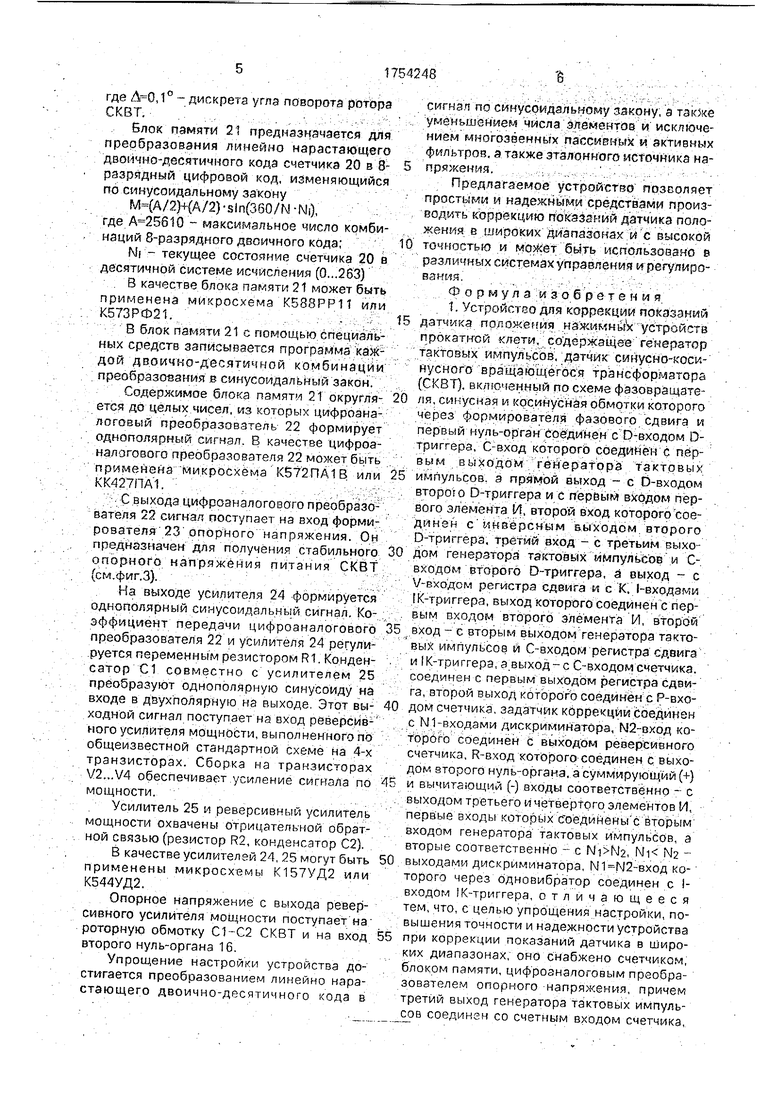
Устройство содержит счет«ик 20, блок памяти 21, ци$роаналоговый преобразователь 22, формирователь 23 опорного напряжения, причем формирователь опорного напряжения содержит два последовательно соединенных усилителя 24, 25.
Устройство для коррекции показаний датчика положения работает следующим образом.
Генератор 1 тактовых импульсов формирует прямоугольные импульсы с требуемой частотой и скважностью. Датчик 2 СКВТ работает в режиме фазовращателя, Для преобразования амплитудной зависимости выходного напряжения датчика 2 СКВТ в фаз зую синусная Р1 и косинусная Р4 обмотки соединены с формирователем 3 фазового сдвига. Напряжение на выходе формирователя 3 фазового сдвига постоянно по амплитуде, а фаза его пропорциональна углу поворота СКВТ 2,
Первый нуль-орган 4 фиксирует МОМРН- ты перехода этого напряжения через нуль (см.фиг 2). С выхода первого нуль-органа 4 сигнал синхронизируется с тактовыми импульсами. Синхронизация выполнена на двух D-трмггерах 5 и 6 и первого элемента И 7.
Первый D-триггер 5 управляется тактовыми импульсами Т1Л2, а второй D-триггер 6 - тактовыми импульсами Л/И. Эти импульсы на первом м втором выходах генератора 1 тактовых импульсов сдвинуты относительно друг друга на 180°. Первый D-триггер 5 включается только в случае, если задний Фронт импульса Tl/12 наступает позднее первого фронта импульса с выхода первого нуль-органа 4 При одновременном поступлении фронтов возможна попытка включения второго D-триггера Однако в этом случае получаемый узкий импульс с выхода первого D-триггера 5 не передается дальше. Если первый D-триггер 5 включается, то при поступлении тактовых импульсов ТИ2 на выходе первого элемента И7 появляется импульс, ширина которого равна тактовому ТИ1, после чего включается второй D-триг60.
первый D-триггер 5, а затем второй D-триггер 6. Таким образом, на выходе первого элемента И7 выделяются импульсы, соответствующие передним фронтам входного
импульса с выхода первого нуль-органа 4. Этот импульс считается измерительным.
Фазовый сдвиг напряжения, пропорциональный углу поворота СКВТ, преобразуется во временной интервал между
опорным и измерительным импульсами. Каждый импульс с выхода первого нуль-орган 4 подготавливает регистр 8 сдвига к приему тактовых импульсов ТИ2, а IK-триггер 9 этим импульсом сбрасывается в нулевое состояние (см. фиг.2) и через второй элемент И10 тактовые импульсы ТИ2 прерываются Единичное состояние К-триггера открывает второй элемент И10 и унитарный код (см. фиг.З) поступает в счетчик 11, где преобразуется в параллельный.
По переднему фронту первого измерительного импульса с выхода первого элемента 1/17 регистр 8 сдвига формирует команду, по которой содержимое счетчика
11 перезаписывается в реыстр 12 По второму импульсу регистра 8 сдвига срабатывает счетчик 11. С зыхода регистра 12 код поступает на выход устройства
Величина коррекции устанавливается
на задатчике 13 коррекции и вводится на Mi-вход дискриминатора 14 чисел Реверсивный счетчик 15 запускается сигналом Опорный с выхода второго нуль-органа 16. , В зависимости от наличия сигналов на Ni
N2, Ni N2-8btxoflax дискриминатора 14 чисел через третий 17 или четвертый 18 элемент И реверсивный счетчик 15 запускается на суммирование или вычитания и на вход его поступают тактовые импульсы ТИ2. Когда число импульсов, отсчитанное реверсивным счетчиком 15, разно числу, установленному на задатчике 13 коррекции, на Н №-входах дискриминатора 14 появляется сигнал. По переднему фронту этого
сигнала одновибратор 19 формирует импульсы (см.фиг 2), которые устанавливают IK-триггер 9 в единичное состояние В результате открытие второго элемента И10 задерживается на ТИ2 тактовых импульсов
Коэффициент пересчета счетчика 0 выбран таким, чтобы величина перемещения рабочего органа была непосредственно в заданных величинах,
Величина коэффициента перечета находится с округлением до целого числа из соотношения
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети | 1986 |
|
SU1338914A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Датчик углового положения,скорости и ускорения вала | 1985 |
|
SU1368786A1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1410277A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942101A1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU957245A1 |

Использование: позиционное управление механизмами Сущность изобретения: устройство содержит генератор тактовых импульсов (1), датчик синусно-косинусного вращающегося трансформатора (2), формирователь фазового сдвига (3), 2 нуль-органа
При исчезновении входного сигнала с первого нуль-органа 4 сначала отключается
-(рт/ /ВД/ро,
где ,1° - дискрета угла поворота ротора
сквт.
Блок памяти 21 предназначается для преобразования линейно нарастающего двоично-десятичного кода счетчика 20 в 8- разрядный цифровой код, изменяющийся по синусоидальному закону
M(A/2)+{A/2)-sln(36Q/N Mi), где А 25610 - максимальное число комбинаций 8-разрядного двоичного кода;
NI - текущее состояние счетчика 20 в десятичной системе исчисления (0...263)
В качестве блока памяти 21 может быть применена микросхема К588РР11 или К573РФ21.
В блок памяти 21с помощью специальных средств записывается программа каждой двоично-десятичной комбинации преобразования в синусоидальный закон.
Содержимое блока памяти 21 округляется до целых чисел, из которых цифроана- логовый преобразователь 22 формирует однополярный сигнал. В качестве цифроа- налагового преобразователя 22 может быть применена микросхема К572ПА1В или КК427ПА1,
С выхода цифроаналогового преобразователя 22 сигнал поступает на вход формирователя 23 опорного напряжения. Он предназначен для получения стабильного опорного напряжения питания СКВТ (см.фиг.З).
На выходе усилителя 24 формируется однополярный синусоидальный сигнал. Коэффициент передачи цифроаналогового преобразователя 22 и усилителя 24 регулируется переменным резистором R1. Конденсатор С1 совместно с усилителем 25 преобразуют однополярную синусоиду на входе в двухполярную на выходе Этот выходной сигнал поступает на вход реверсивного усилителя мощности, выполненного по общеизвестной стандартной схеме на 4-х транзисторах. Сборка на транзисторах V2...V4 обеспечивает усиление сигнала по мощности.
Усилитель 25 и реверсивный усилитель мощности охвачены отрицательной обратной связью (резистор R2, конденсатор С2).
В качестве усилителей 24, 25 могут быть применены микросхемы К157УД2 или К544УД2.
Опорное напряжение с выхода реверсивного усилителя мощности поступает на роторную обмотку С1-С2 СКВТ и на вход второго нуль-органа 16.
Упрощение настройки устройства достигается преобразованием линейно нарастающего двоично-десятичного кода в
сигнал по синусоидальному закону, а также уменьшением числа элементов и исключением многозвенных пассивных и активных фильтров, а также эталонного источника напряжения.
Предлагаемое устройство позволяет простыми и надежными средствами производить коррекцию показаний датчика положения в широких диапазонах и с оысокой
0 точностью и может быть использовано в различных системах управления и регулирования
Формула изобретения
t. Устройет so для коррекции показаний
5 датчика положения нажимный устройств прокатной клети, содержащее генератор тактовых импульсов, датчик сииусно-коск- нусного вращающегося трансформатора (СКВТ), включенный по схеме фазовращзте0 ля, синусная и косинусная обмотки которого через формирователя фазового сдвига и первый нуль-орган соединен с D-входом D- триггера, С-вход которого соединен с первым выходом генератора тактовых
5 импульсов а прямой выход - с О-входом второго D-триггера и с перёым входом первого элемента И, второй вход которого соединен с инверсным выходом второго D-триггера, третий вход - с третьим выхо0 дом генератора тактовых импульсов и С- входом второго D-триггерз, а выход - с У-входом регистра сдвига и с К. 1-входзми К-триггера, выход которого соединен с первым входом второго элемента И, второй
5 вход - с вторым выходом генератора тактовых импульсов и С-входом регистра сдвига и К-триггера, а выход-с С-входом счетчика. соединен с первым выходом регистра сдвига, второй выход которого соединен с Р-вхо0 дом счетчика, задатчик коррекции соединен с N1-входами дискриминатора, М2-вход которого соединен с выходом реверсивного счетчика, R-вход которого соединен с выходом зторого нуль-органа, а суммирующий (+)
5 и вычитающий (-) аходы соответственно - с выходом третьего и четвертого элементов И, первые входы которых соединены с вторым входом генератора тактовых импульсов, а вторые соответственно - с , Ni N2 0 выходами дискриминатора, М1 М2-вход которого через одновибратор соединен с - входом iK-триггера, отличающееся тем, что, с целью упрощения настройки, повышения точности и надежности устройства
5 при коррекции показаний датчика в широких диапазонах, оно снабжено счетчиком, блоком памяти, цифрознапогоеым преобразователем опорного напряжения, причем третий выход генератора тактовых импульсов соединен со счетным входом счетчика,
разрядные выходы которого соединены с адресными А-входами блоча памяти, выходу которого соединены с входами цифроа налогового преобразователи, выхол которого соединен с входом формирова геля опорного напряжения, выход которого соединен с роторной обмоткой С1 С и входом второго нуль-орган.
2 Устройство по пЛ о т л и « а ю щ с р с я тем, «то, с целью повышений надежности иу-ем стабилизации опорного напряхе
г/- сг
ни° питания СКВ Г пир у ipcunci / устройства наладки и эксплуатп 4г1и формировдгсль опорного i юпрчжения содержит до погле/шп- гелы осоединрнныхусилиюля репгргич ымуси
лигел и реп рс /пчг (и Л лгтсль ruiUi oi TM, вход огорого соединв с аыходо.л peosp- СИРНСГО усилителя, oxo/i оюрого СОРДМН Н с в У одовд втч)рого усчпигелй, ресэр- CMDHOIO усилитетя нопрчас и соединен отрицатсльчой обратной с иторым входом второго усилпгсля
Фае 2
22
Г +fSS . I
Pve.3
| Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети | 1986 |
|
SU1338914A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Шварцбург А Э Датчик обратных связей станков с ЧПУ | |||
| - Обзор М НИИМАШ, 1982, с 9, рис.6 | |||
