Изобретение относится к области автоматического управления позиционными механизмами и может быть использовано для управления механизмами установки валков обжимной клети винтовой прокатки.
Цель изобретения - повьш1ение точности и надежности устройства.
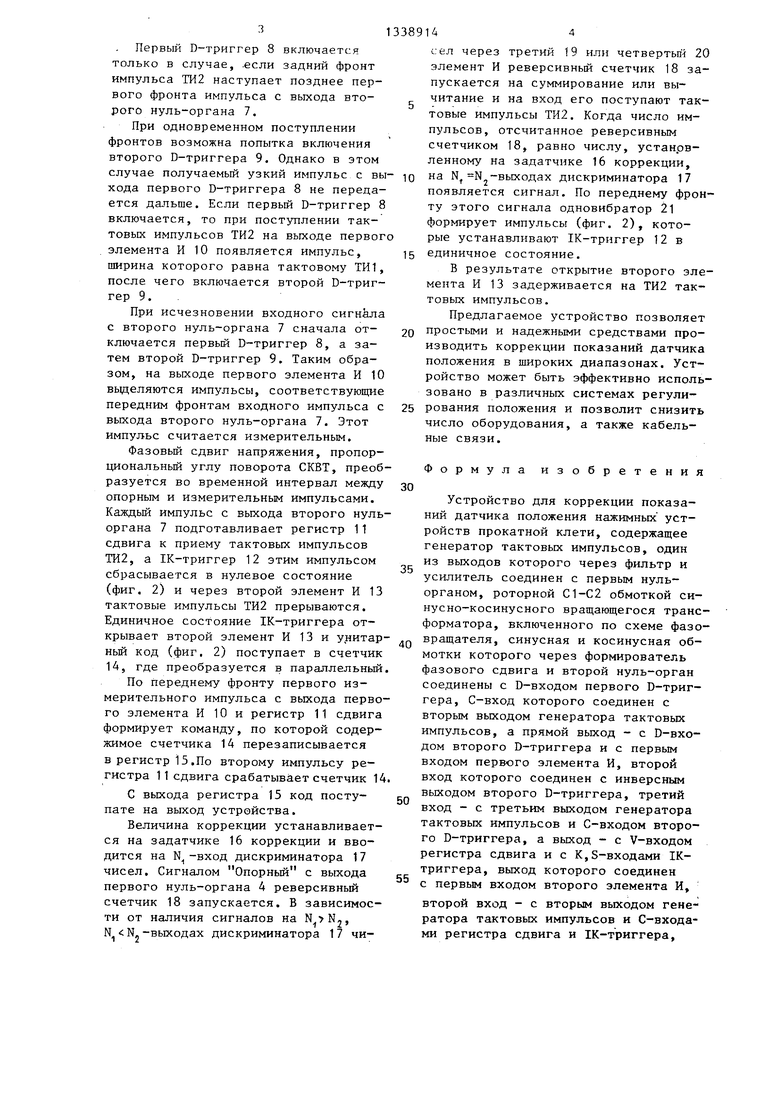
Yla фиг. 1 представлена блок-схема устройства; на фиг, 2 - диаграмма работы устройства.
Устройство для коррекции показаний датчика положения содержит генератор 1 тактовых импульсов, один из выходов которого через фильтр 2 и усилитель 3 соединен с первым нуль-органом 4, роторной С1-С2 обмоткой синус- но-косинусного вращающегося трансформатора (СКВТ) 5, включенного по схеме фазовращателя, синусная Р1 и косинусная Р4 обмотки которого соединены .через формирователь 6 фазового сдвига и второй нуль-орган 7 с D-входом первого D-триггера 8, С-вход которого соединен с вторым выходом генарато- ра 1 тактовых импульсов, а прямой выход - с D-входом второго D-триггера 9 и с первым входом первого элемента И 10, второй вход которого соединен с инверсным выходом второго
D-триггера 9, а третий вход - с третьим выходом генератора 1 тактовых импульсов и С-входом второго D-триггера 9, а выход С V-входом регистра 11 сдвига и с К,5-входами 1К-триг гера 12, выход которого соединен с первым входом второго элемента И 13, второй вход которого соединен с вторым выходом генератора 1 тактовых импульсов и С-входа1чи регистра 11 сдвига и 1К-триггера 12, а выход - с С-входом счетчика 14, выход которого соединен с D-входом регистра 15, Свход которого соединен с первым выхо- g га постоянно по амплитуде, а фаза его дом регистра 11 сдвига, второй выход пропорциональна углу поворота СКВТ 5. которого соединен с R-входом счетчи- Второй нуль-орган 7 фиксирует мо- ка 14, Устройство также содержит за- менты перехода этого напряжения че- датчик 16 коррекции, дискриминатор 17 рез нуль (фиг. 2). С выхода второго чисел, реверсивный счетчик 18, третий нуль-органа 7 сигнал синхронизируется 19 и четвертьй 20 элементы И, одно- с тактовыми импульсами. Синхрониза- вибратор 21, причем задатчик 16 кор- ция вьтолнена на двух Б-триггерах 8
и 9 и первом элементе И 10.
Первый D-триггер 8 управляется тактовыми импульсами ТИ2, а второй D-триггер 9 - тактовыми импульсами ТИ1. Эти импульсы на выходах генератора 1 тактовых импульсов сдвинуты относительно друг друга на 180.
рекции соединен с N -входом дискрш ш- натора 17 чисел, -вхоц которого соединен с выходом реверсивного счетчика 18, R-вход которого соединен с выходом первого нуль-органа 4, а суммирующий и вычитающий входы - соответственно с выходами третьего 19
и четвертого 20 элементов И, рервые входы которых соединены с выходом генератора 1 тактовых импульсов, а вторые входы - соответственно с N , N N -выходами дискриминатора 17 чисел, -выход которого через одновибратор 21 соединен с 1-входом 1К-триггера 12.
Устройство для коррекции показаний датчика положения работает следующим образом.
Генератором 1 тактовых импульсов формируются прямоугольные импульсы
5 с требуемой частотой и скважностью. С первого выхода генератора 1 прямоугольные импульсы при скважности, равной двум, поступают на фильтр 2. На выходе фильтра 2 из этих импульсов
Q выделяется напряжение первой гармоники. Это синусоидальное напряжение имеет коэффициент искажений, не превышающий 0,1%, Низкий коэффициент нелинейных искажений является важней5 шей предпосылкой получения высокой точности. Полученньш на выходе фильтра 2 сигнал усиливается усилителем 3. Усилеиньй сигнал с выхода усилителя 3 поступает на вход первого нуль-органа 4 и на роторные С1-С2 обмотки СКВТ 5, работающего в режиме фазовращателя,,
С помощью первого нуль-органа 4 фиксируются моменты прохождения через нуль питающего СКВТ напряжения из отрицательной в положительную область синусоид (фиг,2) .Выходной сигнал первого нуль-органа 4 считается опорным.
Для преобразования амплитудной 0 зависимости выходного напряжения СКВТ 5 в фазовую синусная Р1 и косинусная Р4 обмотки соединены с формирователем 6 фазового сдвига. Напряжение на выходе формирователя 6 фазового сдви0
5
3
Первый D-триггер 8 включается только в случае, .если задний фронт импульса ТИ2 наступает позднее первого фронта импульса с выхода второго нуль-органа 7.
При одновременном поступлении фронтов возможна попытка включения второго D-триггера 9. Однако в этом случае получаемый узкий импульс с выхода первого D-триггера 8 не передается дальше. Если первый D-триггер 8 включается, то при поступлении тактовых импульсов ТИ2 на выходе первого элемента И 10 появляется импульс, ширина которого равна тактовому ТИ1, после чего включается второй D-триггер 9. .
При исчезновении входного сигнала с второго нуль-органа 7 сначала отключается первый D-триггер 8, а затем второй D-триггер 9, Таким образом, на выходе первого элемента И 10
1
вьщеляются импульсы, соответствующие передним фронтам входного импульса с выхода второго нуль-органа 7. Этот импульс считается измерительным.
Фазовый сдвиг напряжения, пропорциональный углу поворота СКВТ, преобразуется во временной интервал между опорным и измерительным импульсами. Каждый импульс с выхода второго нуль- органа 7 подготавливает регистр 11 сдвига к приему тактовых импульсов ТИ2, а 1К-триггер 12 этим импульсом сбрасывается в нулевое состояние (фиг. 2) и через второй элемент И 13 тактовые импульсы ТИ2 прерываются. Единичное состояние 1К-триггера открывает второй элемент И 13 и унитар- ньй код (фиг. 2) поступает в счетчик 14, где преобразуется в параллельный
По переднему фронту первого измерительного импульса с выхода первого элемента И 10 и регистр 11 сдвига формирует команду, по которой содержимое счетчика 14 перезаписывается в регистр 15.По второму импульсу регистра 11 сдвига срабатывает счетчик 14
С выхода регистра 15 код посту- пате на выход устройства.
Величина коррекции устанавливается на задатчике 16 коррекции и вводится на N -вход дискриминатора 17 чисел. Сигналом Опорный с выхода первого нуль-органа 4 реверсивньй счетчик 18 запускается. В зависимости от наличия сигналов на , N N. -выходах дискриминатора 17 чи
3389144
сел через третий 19 или четвертьш 20 элемент И реверсивный счетчик 18 запускается на суммирование или вычитание и на вход его поступают тактовые импульсы ТИ2. Когда число импульсов, отсчитанное реверсивным счетчиком 18, равно числу, установленному на задатчике 16 коррекции,
1Q на -выходах дискриминатора 17 появляется сигнал. По переднему фронту этого сигнала одновибраТор 21 формирует импульсы (фиг. 2), которые устанавливают 1К-трнггер 12 в
15 единичное состояние.
В результате открытие второго элемента И 13 задерживается на ТИ2 тактовых импульсов.
Предлагаемое устройство позволяет
2Q простыми и надежными средствами производить коррекции показаний датчика положения в широких диапазонах. Устройство может быть эффективно использовано в различных системах регули25 рования положения и позволит снизить число оборудования, а также кабельные связи.
Формула изобретения
30
5
0
Устройство для коррекции показаний датчика положения нажимных устройств прокатной клети, содержащее генератор тактовых импульсов, один из выходов которого через фильтр и усилитель соединен с первым нуль- органом, роторной С1-С2 обмоткой си- нусно-косинусного вращающегося трансформатора, включенного по схеме фазовращателя, синусная и косинусная обмотки которого через формирователь фазового сдвига и второй нуль-орган соединены с D-входом первого D-триггера, С-вход которого соединен с вторым выходом генератора тактовых импульсов, а прямой выход - с D-входом второго D-триггера и с первым входом первого элемента И, второй вход которого соединен с инверсным выходом второго D-триггера, третий вход - с третьим выходом генератора тактовых импульсов и С-входом второго D-триггера, а выход - с V-входом регистра сдвига и с К,5-входами IK- триггера, выход которого соединен с первым входом второго элемента И,
второй вход - с вторым выходом генератора тактовых импульсов и С-входами регистра сдвига и 1К-триггера,
0
51338
а выход - с С-входом счетчика, выход которого соединен с D-входами регистра, С-вход которого соединен с первым выходом регистра сдвига, второй выход которого соединен с R-входом счетчика, отличающееся тем, что, с целью повышения точности и надежности устройства, оно снабжено Ьадатчиком коррекции, дискриминатором, реверсивным счетчиком, третьим и четвертым элементами И, одновиб- ратором,.причем задатчик коррекции соединен с N -входами дискриминатора.
10
0
146
N.-вход которого соединен с выходом реверсивного счетчика, R-вход которого соединен с выходом первого нуль- органа, а суммирующий и вычитающий, входы - соответственно с выходами третьего и четвертого элементов И, первые входы которых соединены с вторым входом генератора тактовых импульсов, а вторые - соответственно с , N -N -выходами дискриминатора, N,NJ-выxoд которого через одно- вибратор соединен с 1-входом 1К- триггера.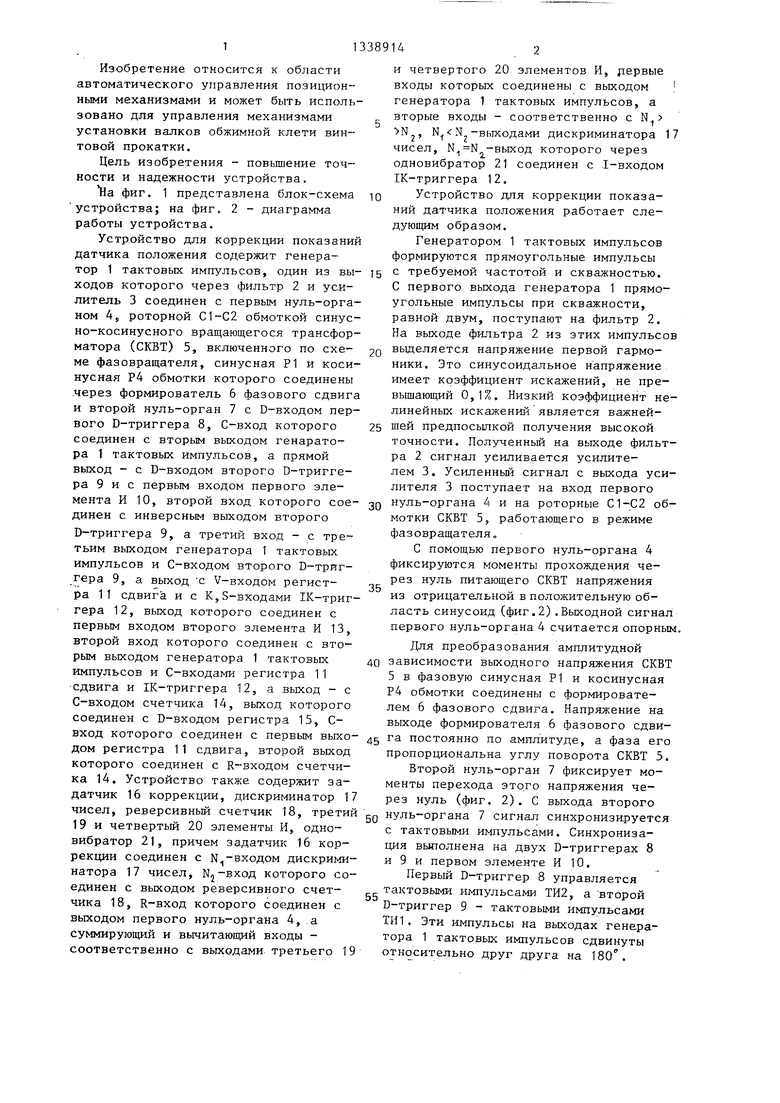
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дл коррекции показаний датчика положения нажимных устройств прокатной клети | 1990 |
|
SU1754248A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Способ измерения рассогласования между углами поворота,один из которых задан кодом | 1985 |
|
SU1285595A1 |
| Устройство для измерения рассогласования между углом и кодом | 1987 |
|
SU1411973A1 |
| Устройство измерения перемещения гидронажимного механизма прокатной клети | 1988 |
|
SU1593763A1 |
| Импульсно-фазовая следящая система | 1982 |
|
SU1023280A1 |
| Датчик углового положения,скорости и ускорения вала | 1985 |
|
SU1368786A1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1410277A1 |
| Генератор псевдослучайных последовательностей | 1987 |
|
SU1443141A1 |
| Устройство для управления преобразователем постоянного напряжения в напряжение заданной формы | 1988 |
|
SU1646026A1 |
Изобретение относится к автоматическому управлению позиционными механизмами и может быть использовано для управления механизмами установки валков обжимной клети винтовой прокатки. Цель изобретения - повышение точности и надежности достигается введением цифровой коррекции вместо второго СКВТ с прецизионным механизмом. 2 ил. (/) СО 00 00 ;о
Р
1-1
И Нз
Ф11г1
к
U
Фиг.2
| Устройство для коррекции показаний датчиков положения нажимных винтов прокатного стана | 1973 |
|
SU480048A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Слежановский О.В | |||
| и др | |||
| Устройства унифицированной блочной системы (УБСР-Д) | |||
| - М.: Энергия, 1975, с.124, рис | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Горнштейн Л.А | |||
| и др | |||
| Система цифрового измерения и индикации положения механизма | |||
| - Инструктивные, указания по проектированию электротехнических промьшшенных установок | |||
| М.: Энергия, ВНИПИТяжпромэлектропроект, 1976, № 1, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
