Изобретение относится к весоизмерительной технике и может быть использовано для проведения оперативных и высокоточных измерений массы в различных отраслях народного хозяйства (в частности в высокопроизводительных автоматических линиях).
Известен способ измерения массы груза по углу отклонения рычага с размещенным на нем грузом. Однако способу присуще невысокое бысгродействие и низкая точность измерения.
Более быстродействующим является способ измерения массы гр/за, который включает фиксацию рычага в заданном положении, размещение на рычаге измеряемого груза, отпускание рычага и измерение интервала времени прохождения рычагом заданного углового перемещения.
Недостатком данного способа является невысокая точность измерения в СВАЗИ с влиянием на результат измерения нестабильности начальных условий (координаты и скорости) отпускания рычага.
Целью изобретения является повышение точности измерения.
Указанная цель достигается за счет„ обеспечения инвариантности результата измерения к начальным условиям отпускания рычага, для чего после фиксации рычага и заданном положении, размещения на рычаге измеряемого груза, отпускания рычага и измерения интервала времени прохождения рычагом заданного углового перемещения, дополнительно задают второе угловое перемещение, измеряют второй интервал времени прохождения рычагом этого перемещения и по измеренным величинам определяют массу груза.
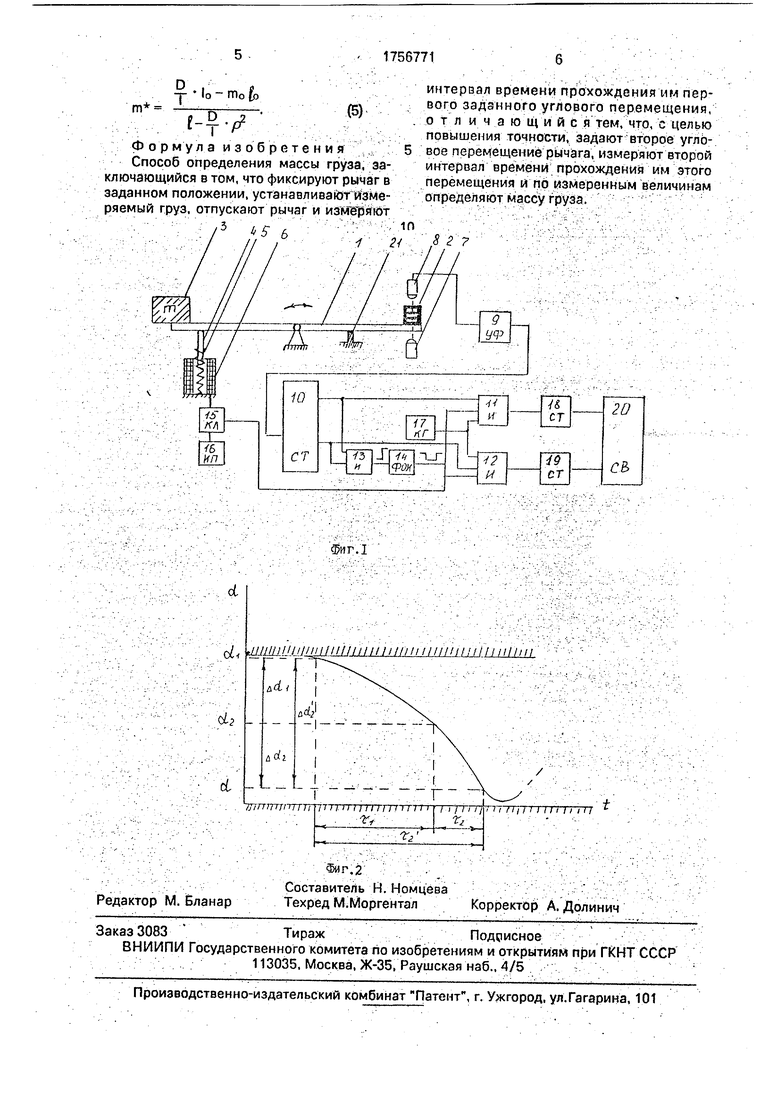
На фиг. 1 изображено устройствд реализующее предлагаемый способ; на фиг. 2 - часть траектории движения коромысла, поясняющая особенности измерений при последовательном и параллельном задании угловых расстояний.
Устройство содержит равноплечее коромысло 1, на одном конце которого закрепсл о
X
лена легкая рамка 2 с тремя щелями, а на другом размещена измеряемая масса 3. Удержание коромысла в исходном положении осуществляется с помощью ферромагнитного толкателя А на пружине 5. размещенной внутри соленоида 6. Источник 7 спета и фотодиод 8 размещены соосно по обе стороны от рамки 2 и перпендикуляр; но ей. Выход фотодиода 8 через усилитель- формирователь 9 связан с счетчиком-делителем 10 на три. Выходы разрядов счетчика-делителя 10 соединены с первыми входами трехвходовых схем И 11 и 12, а также с первым и вторым входом двух- входовой схемы 1/113, выход которой соединен с формирователем 14 одиночного импульса, выход которого соединен со вторыми входами схем И 11 и 12, а также с управляющим входом ключа 15, через который источник 16 питания подсоединяется к обмотке соленоида 6. Третьи входы схем И 11 и 12 соединены с выходом кварцевого генератора 17 с эталонной частотой f кг. Выходы схем И 11 и 12 соединены с входами счетчиков 18 и 19, выходы которых подсоединены к спецвычислителю 20. Для удержания коромысла 1 в исходном положении кроме толкателя 4 используется упор 21.
Устройство работает следующим образом.
Перед началом измерений толкатель 4 под действием пружины 5 находится в верхнем положении, прижимая коромысло 1 к упору 21. При этом щели рамки 2 расположены ниже оптической оси, соединяющей источник света 7 с фотодиодом 8. С включением питания единичный сигнал с выхода формирователя одиночных импульсов 14 открывает ключ 15 и источник 16 питания, подсоединяется к обмотке соленоида 6. Ферромагнитный толкатель втягивается в соленоид, освобождая коромысло 1, которое совершает свободное равноускоренное угловое перемещение под действием момента, создаваемого весом измеряемой массы 3. При пересечении каждой из щелей линии, соединяющей источник 7 света с фотодиодом 8, в последнем формируется импульс напряжения, который усиливается и приводится к стандартному виду в усилителе-формирователе 9 и поступает в счетчик- делитель 10 на три. При пересечении первой щели на выходе первого разряда Счетчика 10 появляется единичный сигнал, схема И 11 открывается и импульсы кварцевого генератора 17 поступают в счетчик 18.
При пересечении второй щели схема И 11 закрывается, а схема И 12 открывается, обеспечивая поступление в счетчик 19 импульсов кварцевого генератора. По пересечении третьей щели открывается схема И 13 и в формирователе 14 одиночных импульсов формируется импульс с нулевым потенциалом, который закрывает схемы И 11 и 12.
При этом запись импульсов кварцевого генератора 17 в счетчики 18 и 19 прекращается. Одновременно закрывается ключ 15, обесточивая обмотку соленоида 6. Толкатель 4 под действием пружины 5 движется
0 вверх и приводит коромысло 1 в исходное положение для очередного измерения. Длительность импульса, формируемого в формирователе 14 одиночных импульсов выбирается, исходя из требуемой частоты
5 следования циклов измерений.
Сформированные в счетчиках 18 и 19 коды NI и N2 соответствуют временным интервалам Т И Г2 (N1 Гкг Т, N2 fxr Т2,
0 fW - частота кварцевого генератора), требуемым рычагу для прохождения задаваемых угловых расстояний А«1 и А«2 (фиг. 2), величины которых определяются известными расстояниями между щелями рамки 2 и
5 расстоянием от оси вращения рычага до оптической оси системы контроля положения рычага. Эти коды поступают в спецвычислитель 20, где вычисляется оценка т измеряемой массы как функциональная
0 зависимость
rn f(j),(1)
в которой D/1 представляет собой отношение произведения массы рычага с грузом 5 на его плечо силы тяжести к моменту инерции рычага с грузом, рассчитываемое по результатам проведенных измерений
D 2 (Аса NI - А сц N2) & IgNiN2(Ni±N2)
причем знйку плюс в знаменателе зависимости (2) соответствует случай последовательных измерений ri и тг (фиг. 2), а знаку минус - случай параллельных измерений g п и Г2. Параметры D и I могут быть представлены выражениями
D rrtol o + mЈ(3)
l-Ho + lm + m/T2 .(4)
где m0, io - масса и плечо силы тяжести 0 рычага;
m, - массы и плечо силы тяжести груза;
10, fm - момент инерции рычага относительно оси вращения и момент инерции груза относительно оси, проходящей через его 5 Центр параллельно оси вращения рычага, из которых, пренебрегая величиной lm за счет выбора соответствующих параметров 10 и р , можно получить конечное выражение для нахождения массы
(2)
D
U id
-j- lo - m0 f)
(5)
Формула изобретения Способ определения массы груза, заключающийся в том, что фиксируют рычаг в заданном положении, устанавливают измеряемый груз, отпускают рычаг и измеряют
5 Ь $
ST gf
10
с т
интервал времени прохождения им первого заданного углового перемещения, отличающийся тем, что, с целью повышения точности, задают второе угловое перемещение рычага, измеряют второй интервал времени прохождения им этого перемещения и по измеренным величинам определяют массу груза.
82
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ | 1992 |
|
RU2069331C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ВЗВЕШИВАНИЯ | 1991 |
|
RU2068987C1 |
| Способ измерения постоянного тока | 1991 |
|
SU1835517A1 |
| Цифровое регистрирующее устройство | 1983 |
|
SU1232946A1 |
| Цифровое регистрирующее устройство | 1988 |
|
SU1613863A1 |
| Способ определения ускорения | 1988 |
|
SU1597734A1 |
| Способ измерения индукции магнитного поля | 1988 |
|
SU1629885A1 |
| Весоизмерительное устройство | 1989 |
|
SU1657972A1 |
| ОПТИКО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МОМЕНТА ПЕРЕСЕЧЕНИЯ ПУЛЕЙ СВЕТОВОГО ЭКРАНА МИШЕНИ | 2008 |
|
RU2386100C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ | 1993 |
|
RU2046349C1 |
Изобретение относится к весоизмерительной технике и позволяет повысить то )- ность определения массы груза. Измеряемый груз устанавливают нз Рычаг с грузом освобождают от удерживаю щего приспособления и измеряют два интервала времени, в течение которых рычаг проходит два заданных угловых расстояния По измеренным интервалам времени определяют массу груза, используя ее функцио- нальную зависимость отношен я произведения массы рычага с грузом на плечо силы тяжести к моменту инерции рычага. 2 ил.
d
flllinillllllJilllHIItllHtllllllllllHUII Illlllil
d,
,di
d
| Карпин Е.Б | |||
| Средства автоматизации для измерения и дозирования массы | |||
| - М.; Машиностроение, 1971, с | |||
| Аппарат для электрической передачи изображений без проводов | 1920 |
|
SU144A1 |
| 1971 |
|
SU411308A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
