Изобретение относится к электротехнике и может быть применено в автоматизированных электроприводах металлообрабатывающих станков, где по условиям технологии обработки изделия помимо регулирования частоты вращения привода с постоянным вращающим моментом необходимо регулировать частоту вращения привода с постоянной мощностью.
Известен вентильный электропривод высокоскоростного фрезерного станка, содержащий электромеханический преобразователь (ЭМП) в виде бесконтактного вентильного двигателя постоянного тока с возбуждением от постоянных магнитов и преобразователь частоты, с помощью которого по командам системы ЧПУ станка и датчика положения ротора производится электронная коммутация и управление приводом с постоянным вращающим моментом путем изменения напряжения, подводимого к трехфазной статорной обмотке вентильного двигателя.
Недостатками такой конструкции являются невозможность регулирования частоты вращения привода с постоянной мощностью; область применения в механизмах главного движения ограничена небольшой группой станков, в которых по условиям технологии обработки изделий достаточно регулировать частоту вращения привода с постоянным вращающим моментом (например, в механизмах главного движения строгальных станков).
Известен вентильный электропривод, содержащий электромеханический преобразователь, в корпусе которого размещены статор с магнитопроводом, на котором расположены обмотка якоря и обмотка подмаг- ничивания, подшипниковые щиты, в которых установлен ротор с высококоэрцитивными постоянными магнитами, укрепленными на валу, обмотка якоря подключена к выходу преобразователя частоты, управляющие цепи которого связаны с выходом датчика положения ротора, преобразователь частоты выполнен с возможностью регулирования величины выходного напряжения, блок питания, к выходам которого подключены цепи питания преобразователя частоты и блока регулирования магнитного потока, выход которого соединен с обмоткой подмагничивания, управляющие цепи преобразователя частоты связаны с выходом тахогенератора, управляющие входы блока регулирования магнитного потока связаны с выходами тахогенератора, датчиков тока и напряжения якоря.
Магнитопровод статора ЭМП в этом приводе выполнен из двух одинаковых аксиально смещенных частей, на спинке каждой из которых размещена тороидальная полуобмотка подмагничивания, полуобмотки соединены последовательно-встречно и подключены к выходу блока регулирования
магнитного потока. В результате изменения тока подмагничивания в указанных полуобмотках от нуля до максимально допустимого значения меняется степень насыщения спинок магнитопровода статора и уменьшается
0 таким образом внешняя магнитная проводимость по отношению к постоянным магнитом, т.е. ослабляется магнитный поток в рабочем воздушном зазоре ЭМП.
При использовании данного вентильно5 го электропривода в приводе главного движения металлообрабатывающего станка может быть обеспечено регулирование частоты вращения привода с постоянной мощностью путем ослабления магнитного
0 потока вентильного двигателя по аналогии с известным приводом главного движения с коллекторным двигателем постоянного тока с электромагнитным возбуждением. Недостатками вентильного электропри5 вода по прототипу являются отрицательное влияние магнитной асимметрии магнитопровода статора на процесс регулирования рабочего магнитного потока ЭМП, сравнительно узкий диапазон регулирования час0 готы вращения привода с постоянной мощностью и в связи с этим ограниченные функциональные возможности привода при использовании его в механизмах главного движения металлообрабатывающих стан5 ков.
Цель изобретения - расширение функциональных возможностей путем увеличения диапазона регулирования частоты вращения при работе с постоянной мощно0 стью привода.
Поставленная цель достигается тем, что в вентильном электроприводе содэржатся электромеханический преобразователь, в корпусе которого размещены статор с маг5 нитопроводом, на котором расположены обмотка якоря и обмотки подмагничивания, подшипниковые щиты, в которых установлен роторе высококоэрцитивными постоянными магнитами, укрепленными на валу,
0 обмотка якоря подключена к выходу преобразователя частоты, управляющие цепи которого связаны с выходом датчика положения ротора, преобразователь частоты выполнен с возможностью регулирова5 ния величины выходного напряжения, блок питания, к выходам которого подключены цепи питания преобразователя частоты и блоха регулирования магнитного потока, выход которого соединен с обмоткой подмагничивания, управляющие цепи преобразователя частоты связаны с выходом тэхоге- нератора, управляющие входы блока регулирования магнитного потока связаны с выходами тахогенератора, датчиков тока и напряжения якоря; статор выполнен с од- ним магнитопроводом, на внешней поверхности которого размещена выполненная соленоидальной обмотка подмэгничивания, корпус выполнен из ферромагнитного материала, а подшипниковые щиты и вал зыпол- нены из немагнитного материала.
Конструктивно магнитопроводящий корпус и спинка магнитопроводз статора ЭМП выполнены таким образом, чтобы в процессе подмагничизания спинки корпус оставался ненасыщенным.
Для снижения мощности, необходимой для регулирования рабочего магнитного потока ЭМП, упрощения его конструкции и технологии изготовления магнитопроводз статора, имеющий по прототипу пазы для размещения обмотки якоря, может быть выполнено из порошкового магнитомягкого изотропного материала, например, из кобальтового сплава марки 49К2С&А.
Из того же материала магнитопровод статора ЭМП может быть выполнен в виде беспазового полого цилиндра, на наружной поверхности которого размещена обмотка подмагничивагич, а обмотка якоря разме- щенз на его внутренней поверхности. При такой конструктивной компоновке могут быть дополнительно расширены функциональные возможности путем увеличения диапазона регулирования частоты вращения при работе с постоянной мощностью вентильного электропривода за счет исключения рассеивания магнит,юго потока постоянных магнитов через магнитопрово- дящие зубцы мзгнитопрсзода статора в процессе подмагничивания его спинки.
Для исключениг электрических потерь в обмотке подмагничивания она может быть изготовлена из высокотемпературного сверхпроводящего материала.
Сопоставительный анализ с прототипом показывает, что заявляемый вентильный электропривод отличается наличием в электромеханическом преобразователе соленоидальной системы подмагничивания, в которой обмотка подмагничиваиия, соединенная с блоком регулирования магнитного потока, намотана на наружную поверхность одного магнитопровода статора, минуя пазы, в которых размещены обмотка якоря; магнитопровод, выполняемый в двух возможных вариантах (с пазами и без пазов из магнитомягкого изотропного материала), установлен в магнитолроводящем корпусе; корпус и спинка магнитопроводз по отно-
шению к обмотке подмэгничивания представляют собой замкнутую магнитную цепь. Кроме того вал с опорами, на котором установлен ротор с высококоэрцитивными постоянными магнитами, выполнен немагнитными размещен в магнитопроводящем корпусе посредством подшипниковых щитов, изготовленных из немагнитного материала. Обмотка подмзгнмчивания может изготавливаться как из обычного проводникового материала, так и из высокотемпературного свехпроводяще- го материала.
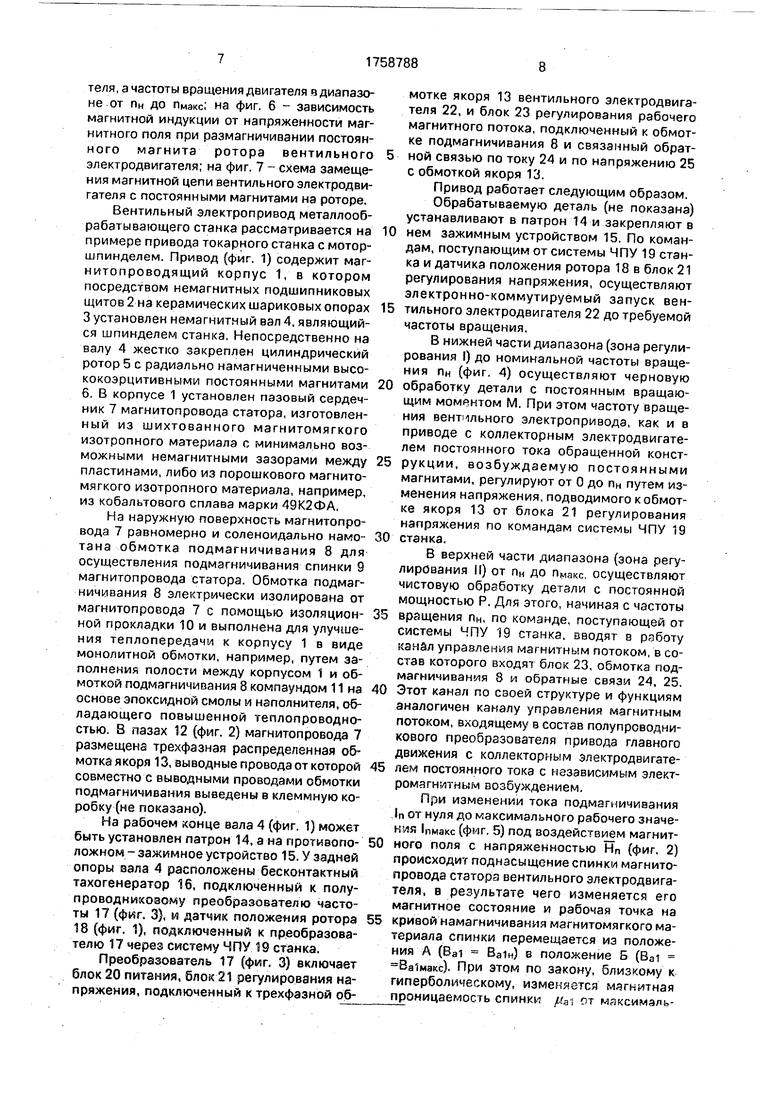
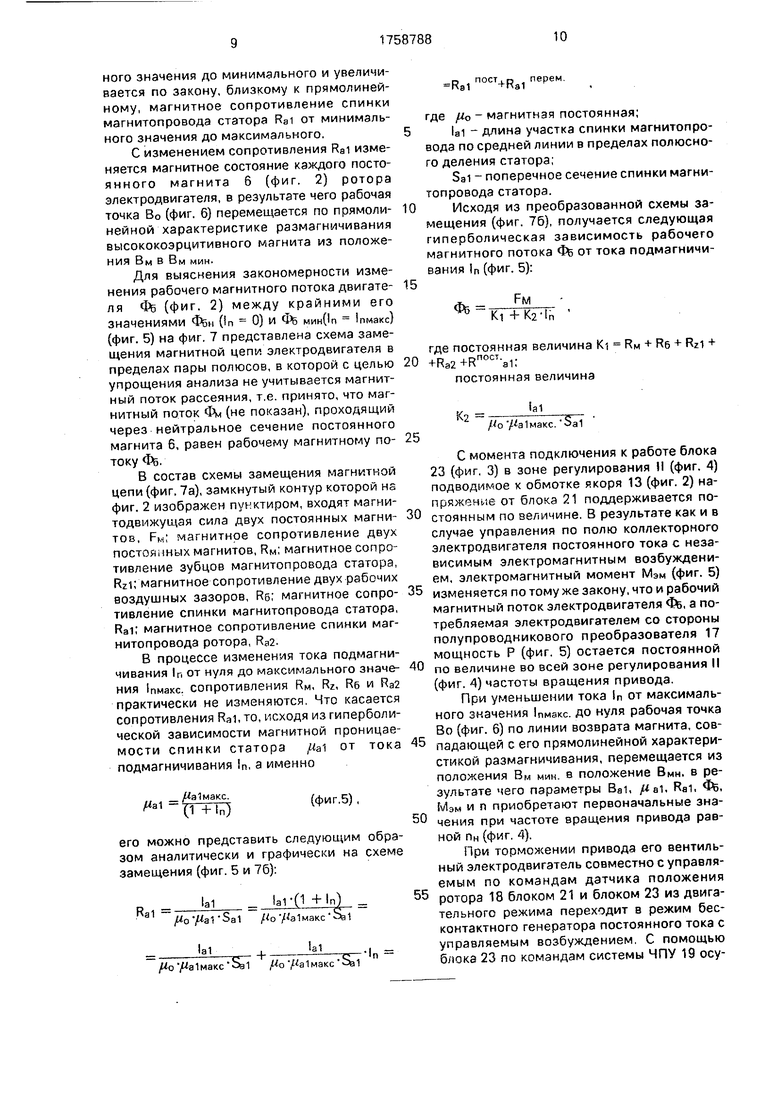
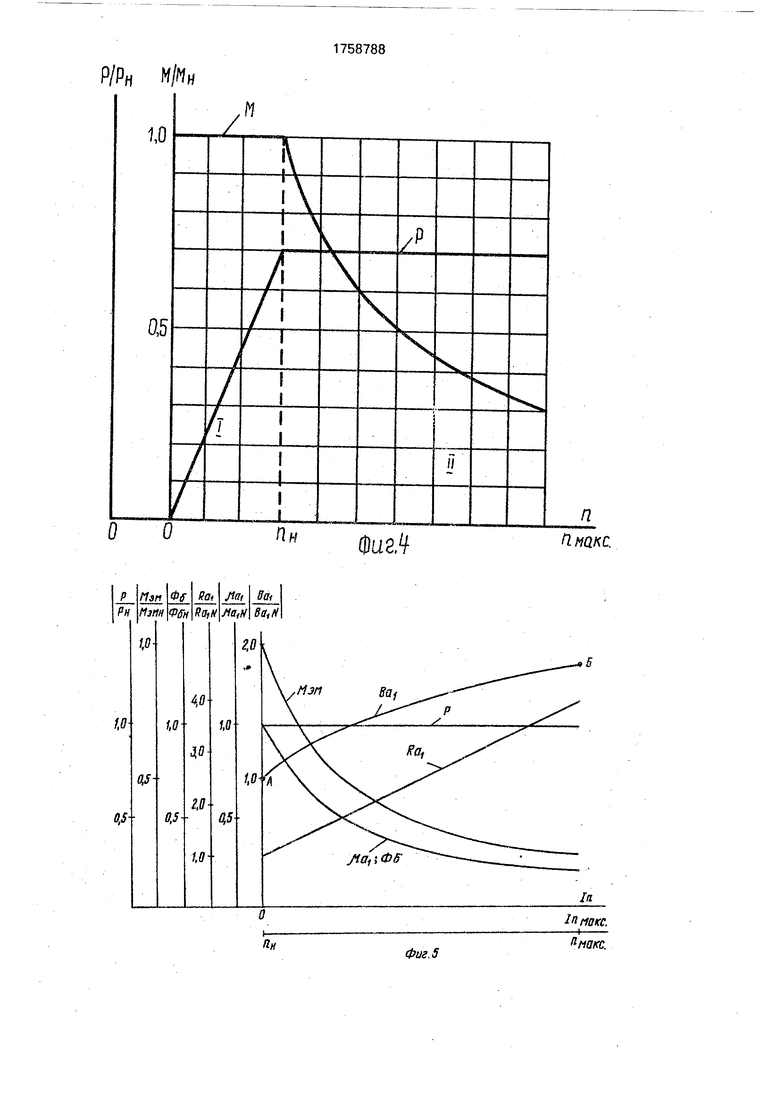
На фиг, 1 показан разрез привода металлообрабатывающего станка с пазовым магнитопроводом статора электромеханического преобразователя (вентильного электродвигателя); на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - блок-схема привода металлообрабатывающего станка; на фиг, 4 - график зависимостей момента привода (n) и мощности привода (n) во всем диапазоне регулирования частоты вращения привода п; на фиг. 5 - графики зависимостей (в относительных единицах) магнитной индукции в спинке магнитопровода статора
Ва1 fn
I In)
а1ч v
магнитной проницаемости спинки магнитопровода статора
ftal
(1п),
магнитного сопротивления спинки магнитопровода статора
Ra1 RalH
: Ъ(1п) ,
рабочего магнитного потока электродвигателя
Фб , п -, )-.
электромагнитного момента электродвигателя
М3м Мэмн
) ,
мощности привода fsOn)
гн v
во всем диапазоне регулирования тока 1П в обмотке подмагничивзния спинки магнитопровода статора вентильного электродвигателя, а частоты вращения двигателя в диапазоне от пн до Пмэкс; на фиг. 6 - зависимость магнитной индукции от напряженности магнитного поля при размагничивании постоянного магнита ротора вентильного электродвигателя; на фиг. 7 - схема замещения магнитной цепи вентильного электродвигателя с постоянными магнитами на роторе.
Вентильный электропривод металлообрабатывающего станка рассматривается на примере привода токарного станка с мотор- шпинделем. Привод (фиг. 1) содержит маг- нитопроводящий корпус 1, в котором посредством немагнитных подшипниковых щитов 2 на керамических шариковых опорах 3 установлен немагнитный вал 4, являющийся шпинделем станка, Непосредственно на валу 4 жестко закреплен цилиндрический ротор 5 с радиально намагниченными высококоэрцитивными постоянными магнитами 6. В корпусе 1 установлен пазовый сердечник 7 магнитопровода статора, изготовленный из шихтованного магнитомягкого изотропного материала с минимально возможными немагнитными зазорами между пластинами, либо из порошкового магнитомягкого изотропного материала, например, из кобальтового сплава марки 49К2ФА.
На наружную поверхность магнитопровода 7 равномерно и соленоидально намотана обмотка подмагничивания 8 для осуществления подмагничивания спинки 9 магнитопровода статора. Обмотка подмагничивания 8 электрически изолирована от магнитопровода 7 с помощью изоляционной прокладки 10 и выполнена для улучшения теплопередачи к корпусу 1 в виде монолитной обмотки, например, путем заполнения полости между корпусом 1 и обмоткой подмагничивания 8 компаундом 11 на основе эпоксидной смолы и наполнителя, обладающего повышенной теплопроводностью. В пазах 12 (фиг. 2) магнитопровода 7 размещена трехфазная распределенная обмотка якоря 13, выводные провода от которой совместно с выводными проводами обмотки подмагничивания выведены в клеммную коробку (не показано).
На рабочем конце вала 4 (фиг. 1) может быть установлен патрон 14, а на противоположном -зажимное устройство 15. У задней опоры вала 4 расположены бесконтактный тахогенератор 16, подключенный к полупроводниковому преобразователю частоты 17 (фиг. 3), и датчик положения ротора 18 (фиг. 1), подключенный к преобразователю 17 через систему ЧПУ 19 станка.
Преобразователь 17 (фиг. 3) включает блок 20 питания, блок 21 регулирования напряжения, подключенный к трехфазной обмотке якоря 13 вентильного электродвигателя 22, и блок 23 регулирования рабочего магнитного потока, подключенный к обмотке подмагничивания 8 и связанный обратной связью по току 24 и по напряжению 25 с обмоткой якоря 13.
Привод работает следующим образом. Обрабатываемую деталь (не показана) устанавливают в патрон 14 и закрепляют в
0 нем зажимным устройством 15. По командам, поступающим от системы ЧПУ 19 станка и датчика положения ротора 18 в блок 21 регулирования напряжения, осуществляют электронно-коммутируемый запуск вен5 тильного электродвигателя 22 до требуемой частоты вращения.
В нижней части диапазона (зона регулирования I) до номинальной частоты вращения Пн (фиг. 4) осуществляют черновую
0 обработку детали с постоянным вращающим моментом М. При этом частоту вращения вентильного электропривода, как и в приводе с коллекторным электродвигателем постоянного тока обращенной конст5 рукции, возбуждаемую постоянными магнитами, регулируют от 0 до пн путем изменения напряжения, подводимого к обмотке якоря 13 от блока 21 регулирования напряжения по командам системы ЧПУ 19
0 станка.
В верхней части диапазона (зона регулирования II) от пн до Пмакс. осуществляют чистовую обработку детали с постоянной мощностью Р. Для этого, начиная с частоты
5 вращения пн, по команде, поступающей от системы ЧПУ 19 станка, вводят в работу канал управления магнитным потоком, в состав которого входят блек 23, обмотка подмагничивания 8 и обратные связи 24, 25.
0 Этот канал по своей структуре и функциям аналогичен каналу управления магнитным потоком, входящему в состав полупроводникового преобразователя привода главного движения с коллекторным электродвигате5 леад постоянного тока с независимым электромагнитным возбуждением.
При изменении тока подмагничивания In от нуля до максимального рабочего значения пмакс (фмг. 5) под воздействием магнит0 ного поля с напряженностью Нп (фиг, 2) происходит поднасыщение спинки магнитопровода статора вентильного электродвигателя, в результате чего изменяется его магнитное состояние и рабочая точка на
5 кривой намагничивания магнитомягкого материала спинки перемещается из положения A (Bai Ва1м) в положение В (Bai Ва1макс). При этом по закону, близкому к гиперболическому, изменяется магнитная проницаемость спинки fis-, от максимального значения до минимального и увеличивается по закону, близкому к прямолинейному, магнитное сопротивление спинки магнитопровода статора Rai от минимального значения до максимального.
С изменением сопротивления Rai изменяется магнитное состояние каждого постоянного магнита 6 (фиг. 2) ротора электродвигателя, в результате чего рабочая точка Во (фиг, 6) перемещается по прямолинейной характеристике размагничивания высококоэрцитивного магнита из положения Вм В Вм мин.
Для выяснения закономерности изменения рабочего магнитного потока двигателя Фь (фиг. 2) между крайними его значениями Фбн (In 0) и Фб мин(п пмакс) (фиг. 5) на фиг. 7 представлена схема замещения магнитной цепи электродвигателя в пределах пары полюсов, в которой с целью упрощения анализа не учитывается магнитный поток рассеяния, т.е. принято, что магнитный поток Фм (не показан), проходящий через нейтральное сечение постоянного магнита 6, равен рабочему магнитному потоку Фэ.
В состав схемы замещения магнитной цепи (фиг. 7а), замкнутый контур которой HS фиг, 2 изображен пунктиром, входят магни- тодвижуа1ая сила двух постоянных магнитов, FM магнитное сопротивление двух постоянных магнитов, RM; магнитное сопротивление зубцов магнитопровода статора, Rzi; магнитное сопротивление двух рабочих воздушных зазоров, Re; магнитное сопротивление спинки магнитопровода статора, Rai; магнитное сопротивление спинки магнитопровода ротора, Ra2.
В процессе изменения тока подмагни- чивания In от нуля до максимального значения 1Пмакс. сопротивления RM, Rz, Re и Ra2 практически не изменяются. Что касается сопротивления Ка1,то, исходя из гиперболической зависимости магнитной проницаемости спинки статора /га1 от тока подмагничивания п, а именно
/ а1макс.
(ГП
(фиг.5) ,
его можно представить следующим образом аналитически и графически на схеме замещения (фиг. 5 и 76):
Rai
1а1
1аГ(1+1п)
jMo / a1 Sa1 ,«a1 макс Sal
Ia1
+
lal
4о У аЧмакс °Ов1 ° а1макс v%1
Rai
перем
где Цо магнитная постоянная;
lai - длина участка спинки магнитопровода по средней линии в пределах полюсного деления статора;
Sal - поперечное сечение спинки магнитопровода статора.
Исходя из преобразованной схемы замещения (фиг, 76), получается следующая гиперболическая зависимость рабочего магнитного потока Фо от тока подмагничивания 1П (фиг. 5):
FM
&
Ki +K2-ln
где постоянная величина Ki RM + Re + Rzi + 20 +Ra2+RnocT-a1;
постоянная величина
25
K2
ia1 / о 7 а1макс. Sa1
С момента подключения к работе блока 23 (фиг, 3) в зоне регулирования II (фиг. 4) подводимое х обмотке якоря 13 (фиг. 2) напряжение от блока 21 поддерживается постоянным по величине. В результате как и в случае управления по полю коллекторного электродвигателя постоянного тока с независимым электромагнитным возбуждением, электромагнитный момент Мэм (фиг. 5)
изменяется по тому же закону, что и рабочий магнитный поток электродвигателя Јfc, а потребляемая электродвигателем со стороны полупроводникового преобразователя 17 мощность Р (фиг. 5) остается постоянной
по величине во всей зоне регулирования II (фиг. 4) частоты вращения привода.
При уменьшении тока 1П от максимального значения 1пМакс. до нуля рабочая точка Во (фиг. 6) по линии возврата магнита, совпадающей с его прямолинейной характеристикой размагничивания, перемещается из положения Вм мин. в положение Вмн. в результате чего параметры Bai, . Rat. Фв, МЭм и п приобретают первоначальные значения при частоте вращения привода равной пн (фиг. 4).
При торможении привода его вентильный электродвигатель совместно с управля- емым по командам датчика положения
ротора 18 блоком 21 и блоком 23 из двигательного режима переходит в режим бесконтактного генератора постоянного тока с управляемым возбуждением. С помощью блока 23 по командам системы ЧПУ 19 осуществляется управление процессом торможения привода вплоть до его полного останова.
Благодаря наличию в приводе канала управления рабочим магнитным потоком элект- ромеханического преобразователя с соленоидальной системой подмагничивания спинки магнитопровода статора полностью исключается магнитная асимметрия магнитопровода и ее отрицательное влияние на процесс регулирования рабочего магнитного потока и как следствие существенно расширяются диапазон регулирования частоты вра- щения с постоянной мощностью и функциональные возможности привода.
Применение предлагаемого вентильного электропривода позволит использовать бесконтактный вентильный электродвигатель постоянного тока не только в механизмах подачи, где регулирование частоты вращения привода осуществляется с постоянным моментом, но и в механизмах главного движения автоматизированных станков, например, работающих в условиях автоматизированных заводов, в которых по условиям технологии обработки изделий помимо регулирования частоты вращения привода с постоянным моментом необходимо регулировать частоту вращения привода с постоянной мощностью (зона регулирования II, фиг. 4).
За счет исключения из электромеханического преобразователя щеточно-коллек- торного узла существенно повышается надежность работы привода главного движения в условиях A3.
Формула изобретения
1. Вентильный электропривод, содержащий электромеханический преобразователь, в корпусе которого размещены статор с магнитопроводом, на котором расположены обмотка якоря и обмотка подмагничивания, подшипниковые щиты, в которых
установлен ротор с высококоэрцитивными постоянными магнитами, укрепленными на валу, обмотка якоря подключена к выходу преобразователя частоты, управляющие цепи которого связаны с выходом датчика положения ротора; преобразователь частоты выполнен с возможностью регулирования величины выходного напряжения, блок питания, к выходам которого подключены цепи питания преобразователя частоты и
блока регулирования магнитного потока, выход которого соединен с обмоткой подмагничивания, управляющие цепи преобразователя частоты связаны с выходом тахогенератора, управляющие входы блока
регулирования магнитного потока связаны с выходами тахогенератора, датчиков тока и напряжения якоря, отличающийся тем, что, с цел3ю расширения области применения путем увеличения диапазона регулирования частоты вращения при работе с постоянной мощностью привода, статор выполнен с одним магнитопроводом, на внешней поверхности которого размещена выполненная соленоидальной обмотка подмагничивания, корпус выполнен из ферромагнитного материала, а подшипниковые 1«тгы ц вал выполнены мз немагнитного материала.
2. Электропривод по п. 1, о т л и ч а ющ и и с я тем, что магнитопровод статора выполнен в виде беспазового полого цилиндра, а обмотка якоря размещена на его внутренней поверхности.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический преобразователь вентильного электродвигателя | 1988 |
|
SU1628153A1 |
| Способ стабилизации выходного напряжения генератора с магнитоэлектрическим возбуждением | 2023 |
|
RU2817407C1 |
| Вентильный электродвигатель | 1989 |
|
SU1720129A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1457140A1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1990 |
|
RU2006143C1 |
| Способ стабилизации выходного напряжения магнитоэлектрического генератора | 2016 |
|
RU2637767C2 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| Вентильный электродвигатель | 1990 |
|
SU1791924A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |

Использование: в вентильном электро- приво/.е металлорежущих станков. Сущность изобретения: вентильный электропривод содержит электромеханический преобразователь, в корпусе 1 которого размещен сердечник 7. На валу 4 установА / И -1 98 Ю П i ..i.irr i / . Л// - / -Л jt,- i adcjuQQOCQj xJtyty 5лен ротор 5 с высококоэрцитивными магнитами 6. На сердечнике 7 статора расположе- на обмотка якоря и обмотка подмагничивания 8. Обмотка якоря подключена к выходу преобразователя частоты. Управляющие цепи преобразователя связаны с датчиком положения ротора 18. Обмотка подмагничивания 8 подключена к блоку регулирования магнитного потока. Новым в электроприводе является соленоидальное выполнение обмотки подмагничивания 8 корпуса 1 из ферромагнитного материала, а подшипниковых щитов и вала из немагнитного материала, причем статор выполнен с одним сердечником 7. Статор может быть выполнен в виде беспазового полого цилиндра, а обмотка якоря 13 расположена на его внутренней поверхности. 1 з.п. ф-лы, 7 ил. А -1 98 Ю Ё VJ сл 00 VJ 00 00 
17
380В
Фиг. 2
Фиг.З
Р/РН 1фн
1,0
/
П
О О
Пн
Фи2,1
П. макс.
фиг 5
8а;
7
s
/
-Н
-нс
u
RH
Фиг.В
Редактор И.Касарда
Фиг 7
Составитель Э.Королев Техред М.Моргентал
Внн
/
Внцин.
02
си
пост.
перем.
Корректор Л.Лукач
| Высокоскоростные фрезерные шпиндели | |||
| Проспект фирмы Тамфиор, 1983, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Авторское свидетельство СССР № 1660563, 1988 | |||
