Изобретение относится к электротехнике, в частности к регулируемым машинам переменного тока различного назначения при работе их от преобразователя частоты, и может быть использовано в автономной системе электрооборудования (АСЭ) транспортных средств с вентильными электродвигателями (ВД).
Целью изобретения является уменьшение пульсаций вращающего момента ВД, улучшение энергетических, динами3 14571404
ческих, массогабаритных показателейства 9, другие входы которого связа- и расширение диапазона регулирования|НЫ с выходом сигналов углового поло- частоты вращения,женин ротора генератора 1 СУ 4 и с
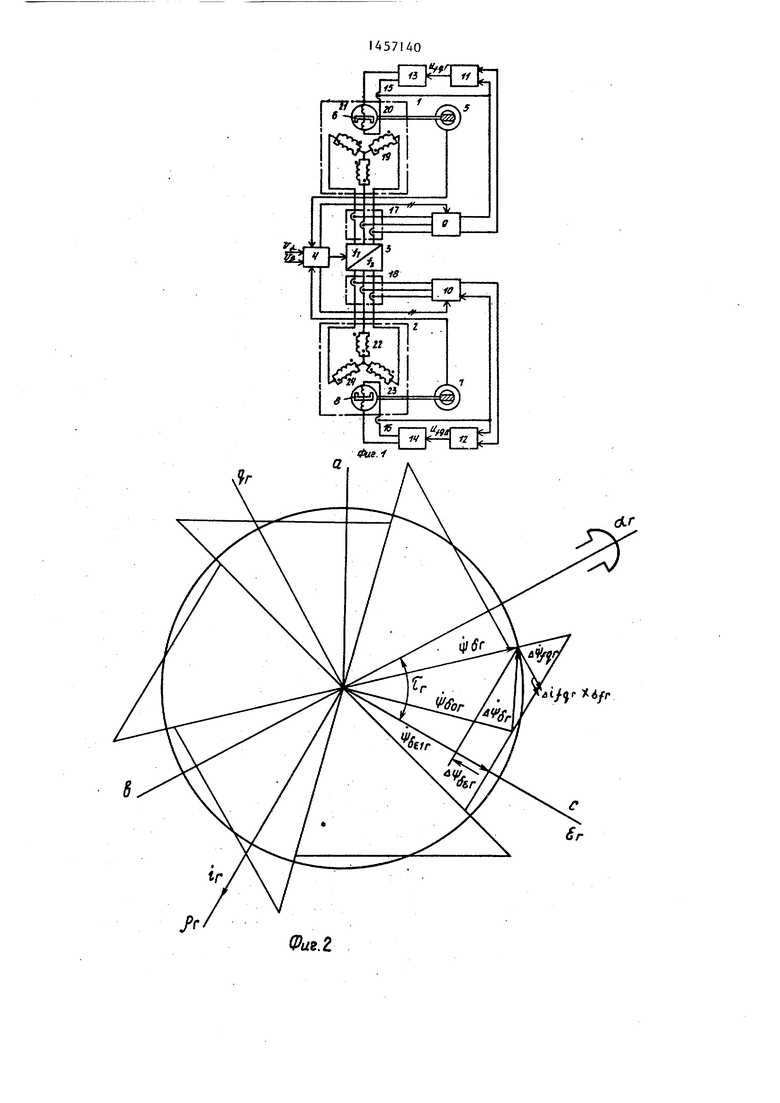
На фиг. 1 приведена принципиаль-датчиком 17 тока якоря генератора 1.
ная электрическая схема АСЭ с БД; наЭМП 2 включает в себя 2р -полюсфиг. 2 и 3 - диаграммы изображающихную т -фазную обмотку 22 якоря, кажвекторов соответственно генератора идэя фаза которой выполнена из двух
электромеханического преобразователяветвей, расположенных одна относи(ЭМП); на фиг. 4 - функциональнаяю тельно другой со сдвигом на угол схема вычислительного устройства; и соединенных между собой своифиг, 5 - функциональная схема блоками разноименными .выводами. Индуктор
формирования потокосцеплений якоря;23 ЭМП 2 снабжен полюсами с дополнина фиг. 6 - конструктивная схема ЭМПтельной обмоткой 24, расположенными
и генератора с датчиком углового по-is относительно полюсов индуктора ЭМП 2
ложения ротора; на фиг. 7 - конструк-на угол Т/2р. Дополнительная обмоттивная схема диска ЭМП и генератора.ка 24 возбуждения ЭМП 2 соединена
АСЭ (фиг. 1) содержит генераторсвоими зажимами с выходными зажимами
1 переменного тока, ЭМП 2, преобразо-усилителя 14 тока дополнительной обватель 3 частоты с частотой f на20 24 возбуждения ЭМП 2, входом,
входе и f,j на выходе, систему 4 уп-соединенного с выходом регулятора 12
равления (СУ), на вход которой посту-тока дополнительной обмотки 24 возпают сигнапы U, Ua, характеризукщиебуждения ЭМП 2. Первый вход регулятоугол запаздывания d угол опережения,ра 2 тока подключен к выходу втородатчик 5 углового положения ротора 625 го вычислительного устройства 10, .
генератора 1, датчик 7 углового поло-второй вход - к выходу датчика 16 тожения ротора 8 ЭМП 2, первое и второека дополнительной обмотки 24 возбужвычислительные устройства 9 и 10, -Дения ЭМП 2 и к одному из входов втопропорционально-интегральные регуля-рого вычислительного устройства 10,
торы 11 и 12, усилители 13 и 14, дат-ЗО ДРУГие входы которого связаны с вычики 15 и 16 тока дополнительных по-ходом датчика углового положения роперечных обмоток возбуждения генера-тора ЭМП 2 СУ 4 и датчиком 18 тока
тора 1 и ЭМП 2, датчики 17 и 18 токаякоря ЭМП 2.
ббмоток якорей генератора 1 и ЭМП 2.Обмотка 19 якоря генератора 1 свяГенератор 1 переменного тока вкпю-35 обмоткой 22 якоря ЭМП 2 через
чает в себя 2р,-полюсную т,-фазнуюпреобразователь 3 частоты, управляюобмотку 19 якоря, каждая-фаза которойЩие цепи которого связаны с выходом
вьшолнена из двух ветвей, расположен-управляющих и myльcoв СУ 4. СУ 4 соных одна относительно другой со сдви-держит входы регулирования угла загом на угол /р, и соединенных меж-40 аздывания и угла опережения, а такду собой своими разноименньми вывода-же входы, связанные с выходами датчими. Индуктор 20 генератора 1 снабженков 5 и 7 углового положения роторов
полюсами с дополнительной обмоткой 216 и 8 генератора I ЭШ 2. Выходные
возбуждения, расположенными относи-сигналы датчиков 5 и 7 углового полотельно полюсов индуктора генератора 1.5 роторов 6 и 8 генератора 1. и
на угол Т/2р . Дополнительная обмот-ЭМП 2 пропорциональны тригонометрика 21 возбуждения соединена своимическим функциям углового положения
зажимами с выходными зажимами усили-их роторов.
теля 13 тока дополнительной обмоткиПервое вычислительное устройство 21 возбуждения генератора 1, входомgQ 9 по сигналам датчиков 5, 15 и 17 уг- соединенного с выходом регулятора 1 1лового положения ротора генератора I , тока дополнительной обмотки 21 воз-тока дополнительной обмотки 21 воз- бу дения генератора 1. Первый входбуждения генератора I, тока обмотки регулятора 11 тока подключен к выходу19 якоря генератора 1, направления первого вычислительного устройства 9,55 ° которой на фиг. 2 и 3 обоз- второй вход - к выходу датчика 15 то-начены как а, Ь, с, формирует сиг- ка дополнительной обмотки 21 возбуж-нал дения генератора 1 и к одному из вхо-д -(ке /sinT, дов первого вычислительного устрой-
51457140
второе вычислительное устройство 10 по сигналам датчиков 7, 16 и 18 углового положения ротора ЭМП 2, тока дополнительной обмотки 24 возбуждения ЭМП 2, тока обмотки 22 якоря ЭМП 2 формирует сигнал
ля то тр
гд сц 15 об ет
А SeA гдел(5е ,A(jg
проекции переменньк составляющих основного потокосцепле- ния генератора и ЭМП на оси 5f иРд ортогональные направлению векторов тока якоря генератора и ЭМП;
углы между продоль ными осями d(., d и осями б , д генератора и ЭМП.
В АСЭ при фазовом регулировании напряжения генератора 1 и напряжения ЭМП 2 эквивалентный вьтрямленный ток (модуль вектора тока якоря) ЭМП 2 содержит кроме постоянной составляющей переменные составляющие тока, которые и являются причиной пульсации вращающего момента и ухудшения энер- гетических показателей БД. Кроме того, вращающий момент БД является пульсирукщим даже при идеально сглаженном эквивалентном выпрямленном токе ЭМП из-за дискретного характера изменения положения вектора тока якоря ЭМП, что приводит при низких частотах вращения к явлению шагания БД, ограничивая тем самым диапазон регулирования частоты вращения БД. Дискретный xapaiKTep изменения положения вектора тока якоря генератора 1 вызывает пульсацию электромагнитного момента генератора 1 и приводит к ухудшению его энергетических показателей.
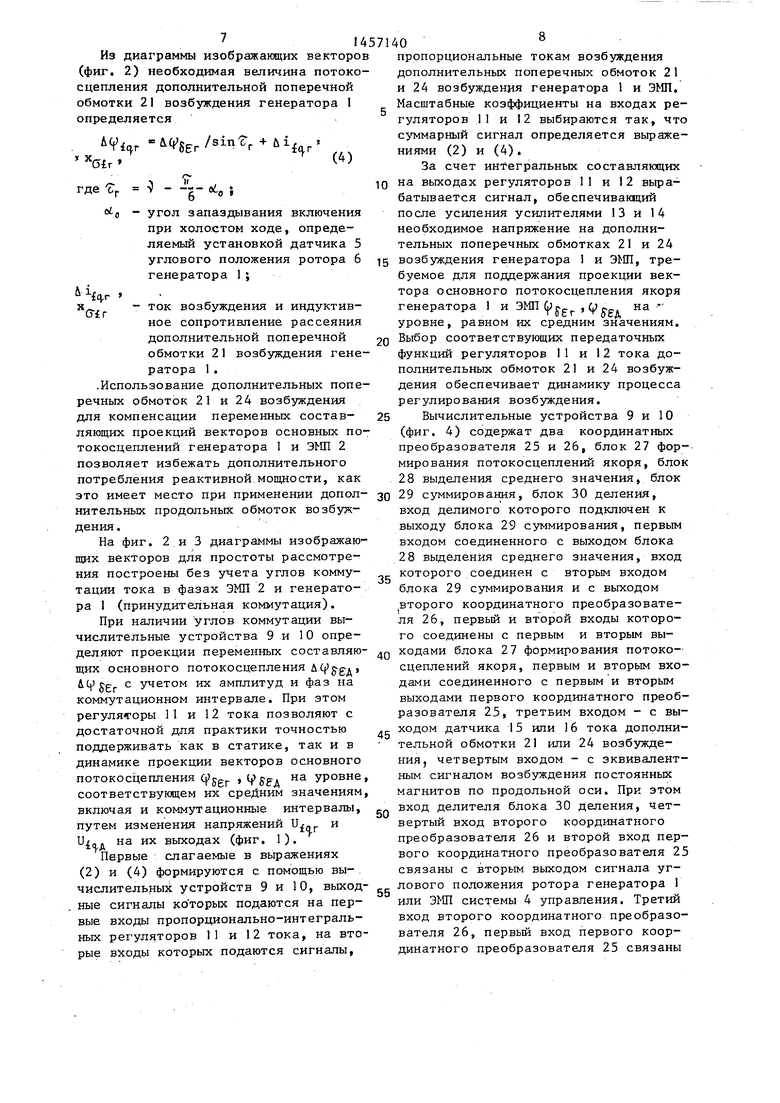
Пульсации эквивалентного выпрямленного тока и момента, обусловленные фазовым регулированием напряже- ния ЭМП и дискретньм характером изменения вектора тока якоря ЭМП, можно устранить если проекцию вектора основного потокосцепления якоря ЭМП на направление Б д , ортогональное векто- ру тока якоря ЭМП 1д, поддерживать равной ее среднему значению путем регулирования тока возбуждения ЭМП по поперечной оси q,, для чего необходимо компенсировать переменную состав
ляющую проекции вектора основного по- токосцепления в вьфажении электромагнитного момента (фиг. 3)
II
А + Ь(,)5ед)1д,
(1)
где 9 ffp А среднее значение проекции вектора основного потокосцепления на направление бд, ортогональное вектору тока якоря ЭМП 2 1д. Из диаграммы изображающих векторов (фиг. 3) необходимая величина потокосцепления дополнительной поперечной обмотки 24 возбуждения ЭМП определяется по формуле
GfA
Л 5ед/31пСд + дЦд
(2)
о.
й -
--1-- ;
угол опережений включения тиристорных групп при холостом ходе, определяемьй установкой датчика 7 углового положения ротора ЭМП;
Нл
й - 5 Ai о „
5
0
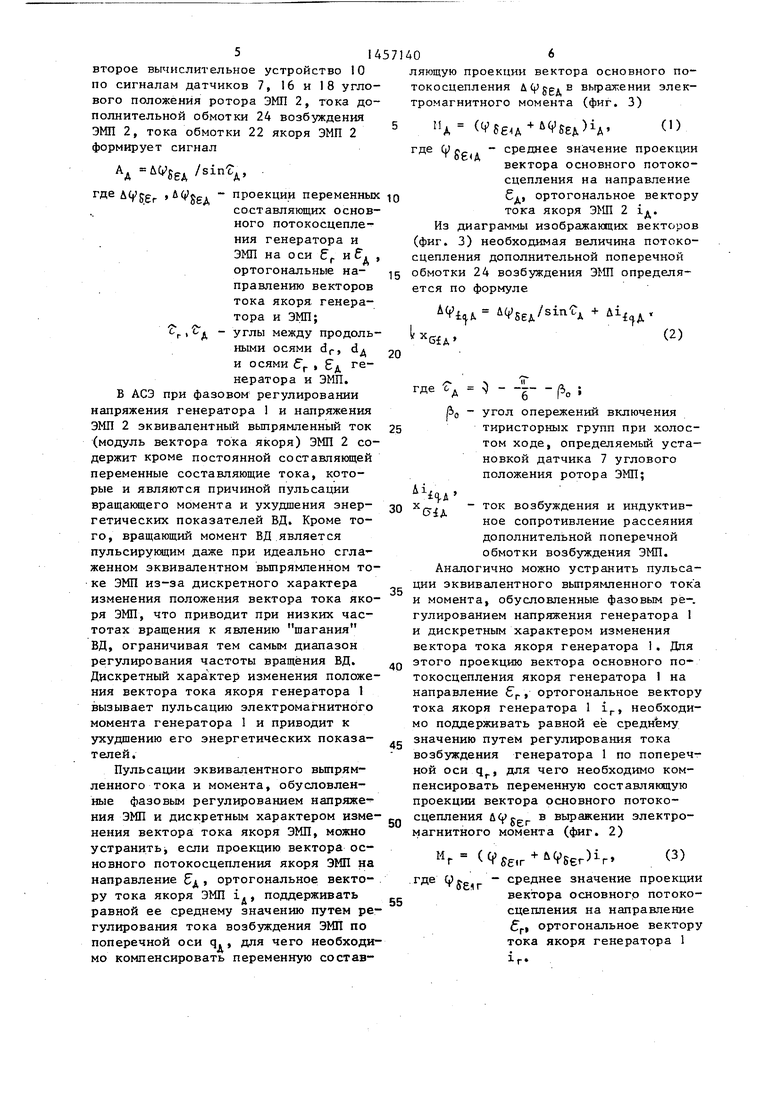
ток возбуждения и индуктивное сопротивление рассеяния дополнительной поперечной обмотки возбуждения ЭМП. Аналогично можно устранить пульсации эквивалентного вьшрямленного тока и момента, обусловленные фазовьм ре-. гулированием напряжения генератора 1 и дискретным характером изменения вектора тока якоря генератора 1. Для этого проекцию вектора основного потокосцепления якоря генератора 1 на направление 6., ортогональное вектору тока якоря генератора 1 i, необходимо поддерживать равной её среднему значению путем регулирования тока возбуждения генератора 1 по поперечной оси q, для чего необходимо компенсировать переменную составляющую проекции вектора основного потокосцепления Л9кр выражении электромагнитного момента (фиг. 2)
г (S5,)ir.
(3)
cpj. - среднее значение проекции вектора основного потоко- сцегшения на направление , ортогональное вектору тока якоря генератора 1
if
Из диаграммы изображающих векторов (фиг. 2) необходимая величина потоко- сцепления дополнительной поперечной обмотки 21 возбуждения генератора 1 определяется
A(f)i
X
V
Шг
де Ср
Цг
(4)
oi, . /sin Cr + ui
- - - oi 6 0
угол запаздывания включения при холостом ходе, определяемый установкой датчика 5 углового положения ротора 6 генератора 1;
М.
fcvr
(fr
ток возбуждения и индуктивное сопротивление рассеяния дополнительной поперечной обмотки 21 возбуждения генератора 1 .
.Использование дополнительных поперечных обмоток 21 и 24 возбуждения для компенсации переменных составляющих проекций векторов основных по- токосцеплений генератора 1 и ЭМП 2 позволяет избежать дополнительного потребления реактивной мощности, как
8
5
0
5
пропорциональные токам возбуждения дополнительных поперечных обмоток 21 и 24 возбуждения генератора 1 и ЭМП. Масштабные козффициенты на входах регуляторов 11 и 12 выбираются так, что суммарный сигнал определяется выражениями (2) и (4).
За счет интегральных составляющих на выходах регуляторов 1 и 12 вырабатывается сигнал, обеспечиванщий после усиления усилителями 13 и 14 необходимое напряжение на дополнительных поперечных обмотках 21 и 24 возбуждения генератора 1 и ЭМП, требуемое для поддержания проекции вектора основного потокосцепления якоря генератора 1 и ЭМП (рр р Фгс. уровне, равном их средним значениям. Выбор соответствующих передаточных функций регуляторов 11 и 12 тока дополнительных обмоток 2 и 24 возбуждения обеспечивает динамику процесса регулирования возбуждения.
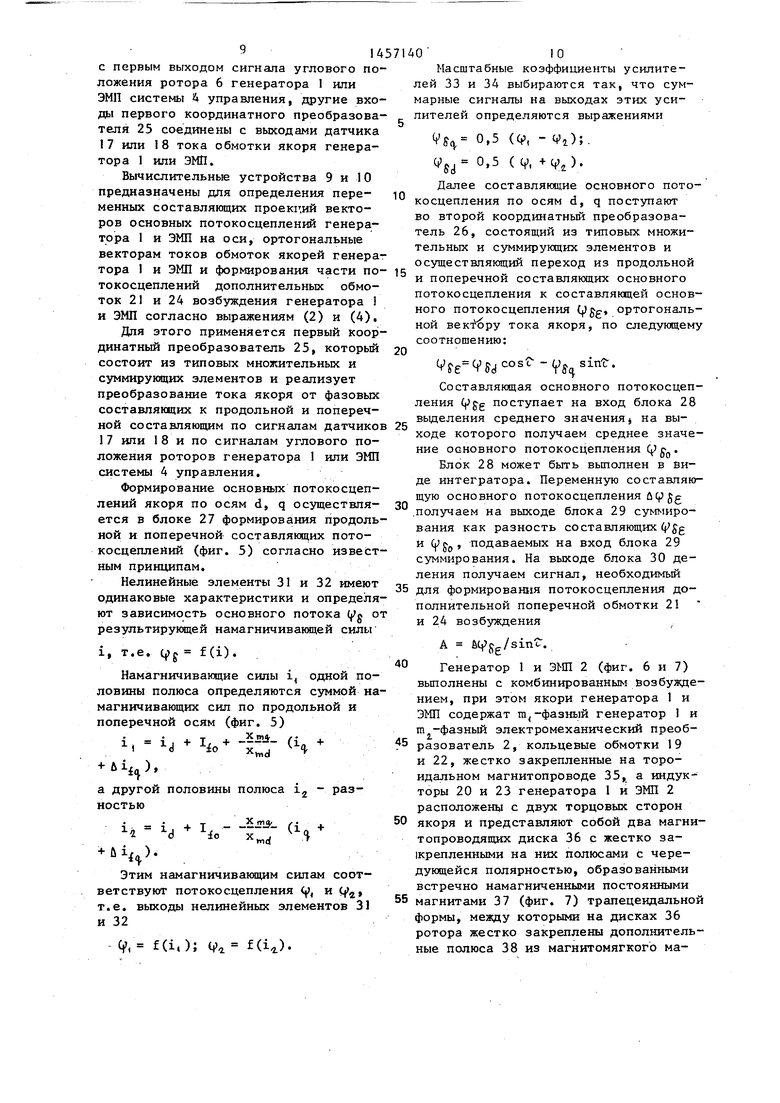
Вычислительные устройства 9 и 10 (фиг. 4) содержат два координатных преобразователя 25 и 26, блок 27 формирования потокосцеплений якоря, блок 28 выделения среднего значения, блок

| название | год | авторы | номер документа |
|---|---|---|---|
| Автономная система электрооборудования с вентильным электродвигателем | 1987 |
|
SU1534662A1 |
| Автономная система электрооборудования | 1987 |
|
SU1621124A1 |
| Способ компенсации пульсаций вращающего момента вентильного электродвигателя | 1986 |
|
SU1480045A1 |
| Вентильный электродвигатель | 1987 |
|
SU1480046A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU615583A2 |
| УСТРОЙСТВО ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2524507C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД С СИНХРОННЫМ ДВИГАТЕЛЕМ | 1995 |
|
RU2092967C1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
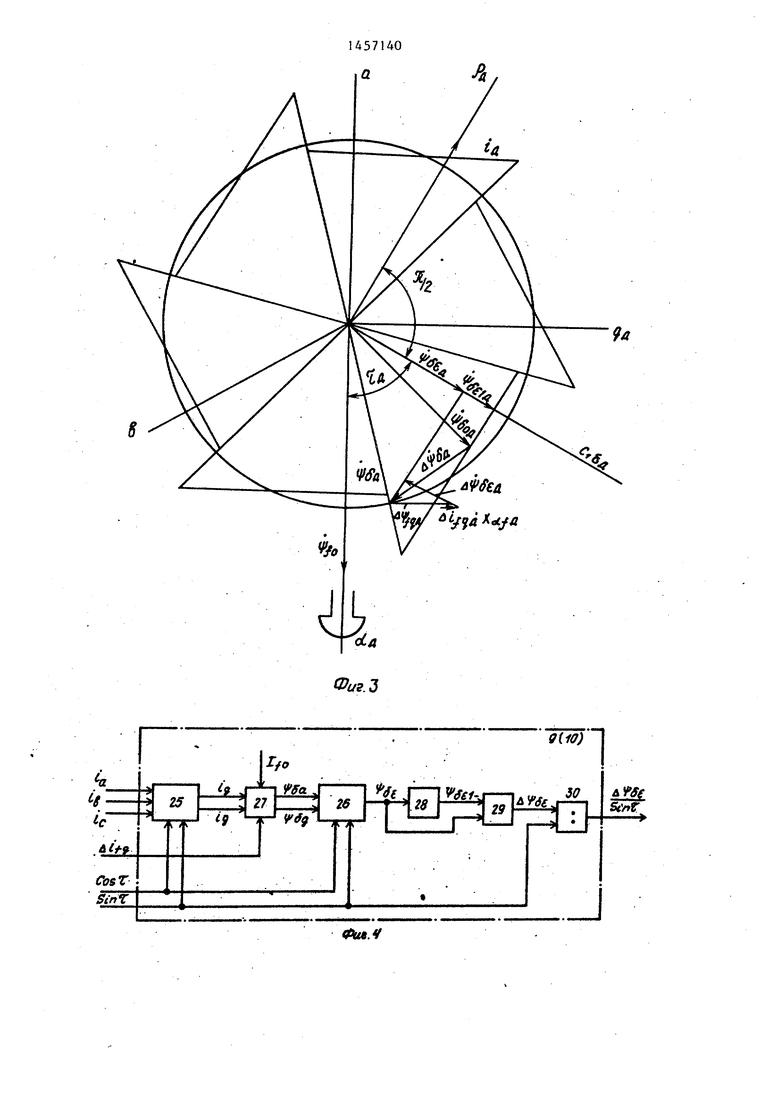
это имеет место при применении допол- зо 29 суммирования, блок 30 деления,
вход делимого которого подключен к выходу блока 29 суммирования, первым
ннтельных продольных обмоток возбуждения.
На фиг. 2 и 3 диаграммы изображающих векторов для простоты рассмотрения построены без углов коммутации тока в фазах ЭМП 2 и генератора 1 (принудительная коммутация).
При наличии углов коммутации вычислительные устройства 9 и 10 определяют проекции переменных составляющих основного потокосцепления д(, itfJtp с их амплитуд и фаз на коммутационном интервале. При этом регуляч-оры 11 и 12 тока позволяют с достаточной для практики точностью поддерживать как в статике, так и в динамике проекции векторов основного потокосцепления ( , Bej уровне, соответствующем их средним значениям, включая и коммутационные интервалы, путем изменения напряжений . и на их выходах (фиг. 1).
Первые слагаемые в выражениях (2) и (4) формируются с помощью вычислительных устройств 9 и 10, выходные сигналы ко торых подаются на первые входы пропорционально-интегральных регуляторов 11 и 12 тока, на вторые входы которых подаются сигналы.
35
40
45
50
55
входом соединенного с выходом блока 28 вьщеленйя среднего значения, вход которого соединен с вторым входом блока 29 суммирования и с выходом второго координатного преобразователя 26, первый и второй входы которого соединены с первым и вторым выходами блока 27 формирования потокосцеплений якоря, первым и вторым входами соединенного с первым и вторым выходами первого координатного преобразователя 25, третьим входом - с выходом датчика 15 или 16 тока дополнительной обмотки 21 или 24 возбуждения, четвертым входом - с эквивалентным сигналом возбуждения постоянных магнитов по продольной оси. При этом вход делителя блока 30 деления, четвертый вход второго координатного преобразователя 26 и второй вход первого координатного преобразователя 25 связаны с вторым выходом сигнала углового положения ротора генератора 1 или ЭМП системы 4 управления. Третий вход второго координатного преобразователя 26, первый вход первого координатного преобразователя 25 связаны
5
0
5
0
5
входом соединенного с выходом блока 28 вьщеленйя среднего значения, вход которого соединен с вторым входом блока 29 суммирования и с выходом второго координатного преобразователя 26, первый и второй входы которого соединены с первым и вторым выходами блока 27 формирования потокосцеплений якоря, первым и вторым входами соединенного с первым и вторым выходами первого координатного преобразователя 25, третьим входом - с выходом датчика 15 или 16 тока дополнительной обмотки 21 или 24 возбуждения, четвертым входом - с эквивалентным сигналом возбуждения постоянных магнитов по продольной оси. При этом вход делителя блока 30 деления, четвертый вход второго координатного преобразователя 26 и второй вход первого координатного преобразователя 25 связаны с вторым выходом сигнала углового положения ротора генератора 1 или ЭМП системы 4 управления. Третий вход второго координатного преобразователя 26, первый вход первого координатного преобразователя 25 связаны
I4571AO 10
с первым выходом сигнала углового по- Масштабные коэффициенты усилите- ложения ротора 6 генератора 1 или лей 33 и 34 выбираются так, что cybfмарные сигналы на выходах этих усилителей определяются выражениями
ЭМП системы управления, другие входы первого координатного преобразователя 25 соединены с выходами датчика 17 или 18 тока обмотки якоря генератора 1 или ЭМП.
Вычислительные устройства 9 и 10 предназначены для определения пере- ю менных составляющих проекций векторов основных потокосцеплений генератора 1 и ЭМП на оси, ортогональные векторам токов обмоток якорей генератора 1 и ЭМП и формирования части по- 15 токосцеплений дополнительных обмоток 21 и 24 возбуждения генератора 1 и ЭМП согласно выражениям (2) и (4),
Для этого применяется первый координатный преобразователь 25, которьй 20 состоит из типовых множительных и суммирующих элементов и реализует преобразование тока якоря от фазовых составлякщих к продольной и поперечVS 0,5 (С, - Vi);. (Pjj 0,5 ( if, + Vj).
Далее составляющие основного пото- косцепления по осям d, q поступают во второй координатньй преобразователь 26, состоящий из типовых множительных и суммирующих элементов и осуществляющий переход из продольной и поперечной составляющих основного потокосцепления к составляющей основного потокосцепления ортогональной вектбру тока якоря, по следующему соотношению:
( - Составляющая основного потокосцепления ( поступает на вход блока 28
„„ вьщеления среднего значения на вынои составляющим по сигналам датчиков 25
ходе которого получаем среднее значение основного потокосцепления ф .
17 ипи 18 и по сигналам углового положения роторов генератора 1 или ЭМП системы 4 управления.
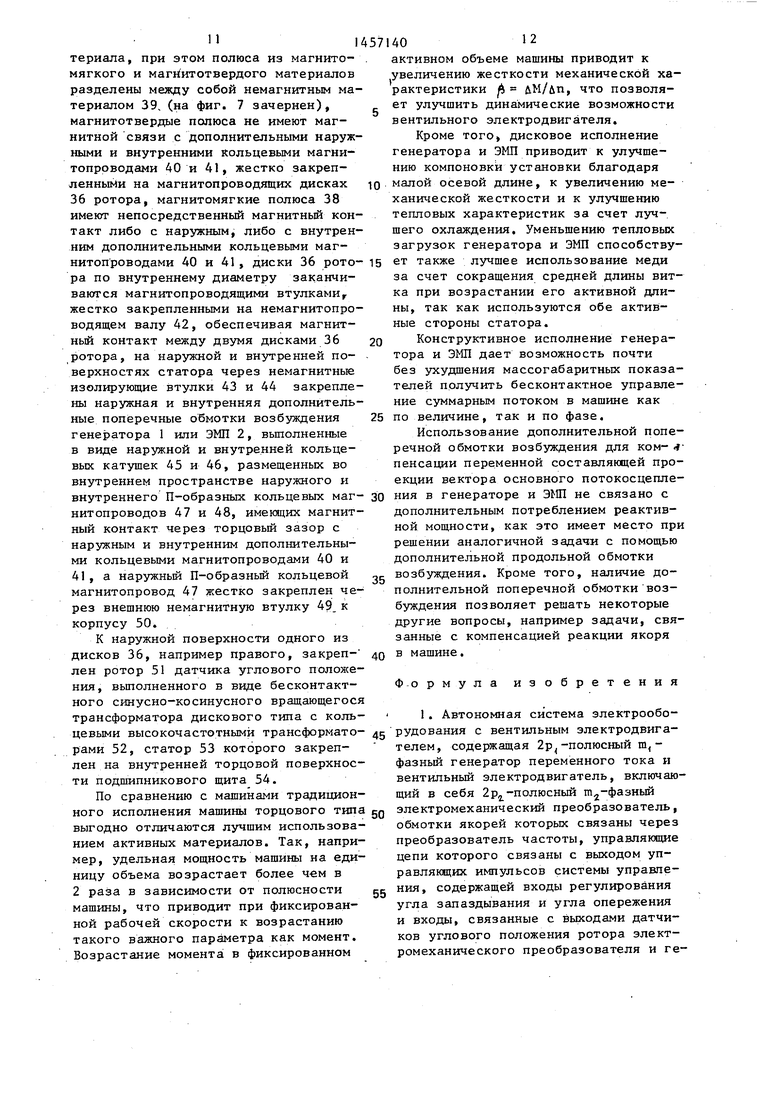
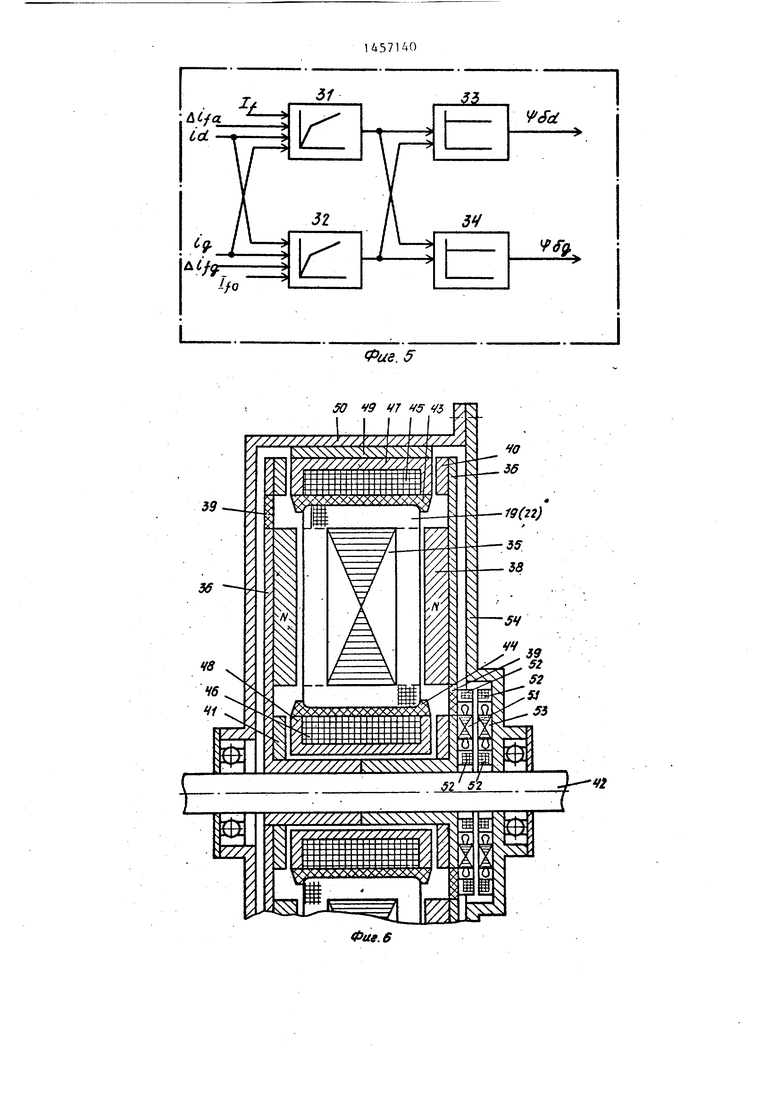
Формирование основных потокосцеплений якоря по осям d, q осуществляется в блоке 27 формирования продольной и поперечной- составляющих пото- косцеплейий (фиг. 5) согласно известным принципам.
Нелинейные элементы 31 и 32 имеют одинаковые характеристики и определяют зависимость основного потока (fn от результирующей намагничиванмцей силы
i, т.е. f (i) .
Намагничивающие силы i, одной половины полюса определяются суммой иа- магиичивающих сил по продольной и поперечной осям (фиг. 5)
а другой половины полюса ij - раз- иостью
o--x-:t H
Ч
Этим намагничивакицим силам соответствуют потокосцепления (, и С т.е. выходы нелинейных элементов 31 и 32
- (,, f(i,); Cj) f(ij.
VS 0,5 (С, - Vi);. (Pjj 0,5 ( if, + Vj).
Далее составляющие основного пото- косцепления по осям d, q поступают во второй координатньй преобразователь 26, состоящий из типовых множительных и суммирующих элементов и осуществляющий переход из продольной и поперечной составляющих основного потокосцепления к составляющей основного потокосцепления ортогональной вектбру тока якоря, по следующему соотношению:
( - Составляющая основного потокосцепления ( поступает на вход блока 28
ходе которого получаем среднее значение основного потокосцепления ф .
Блок 28 может быть вьтолнен в виде интегратора. Переменную составляющую основного потокосцепления UV Sg получаем на выходе блока 29 суммирования как разность составляющих jg и (, подаваемых на вход блока 29 суммирования. На выходе блока 30 деления получаем сигнал, необходимьм для формирования потокосцепления дополнительной поперечной обмотки 21 и 24 возбуждения
А fiqJjfg/sinc.
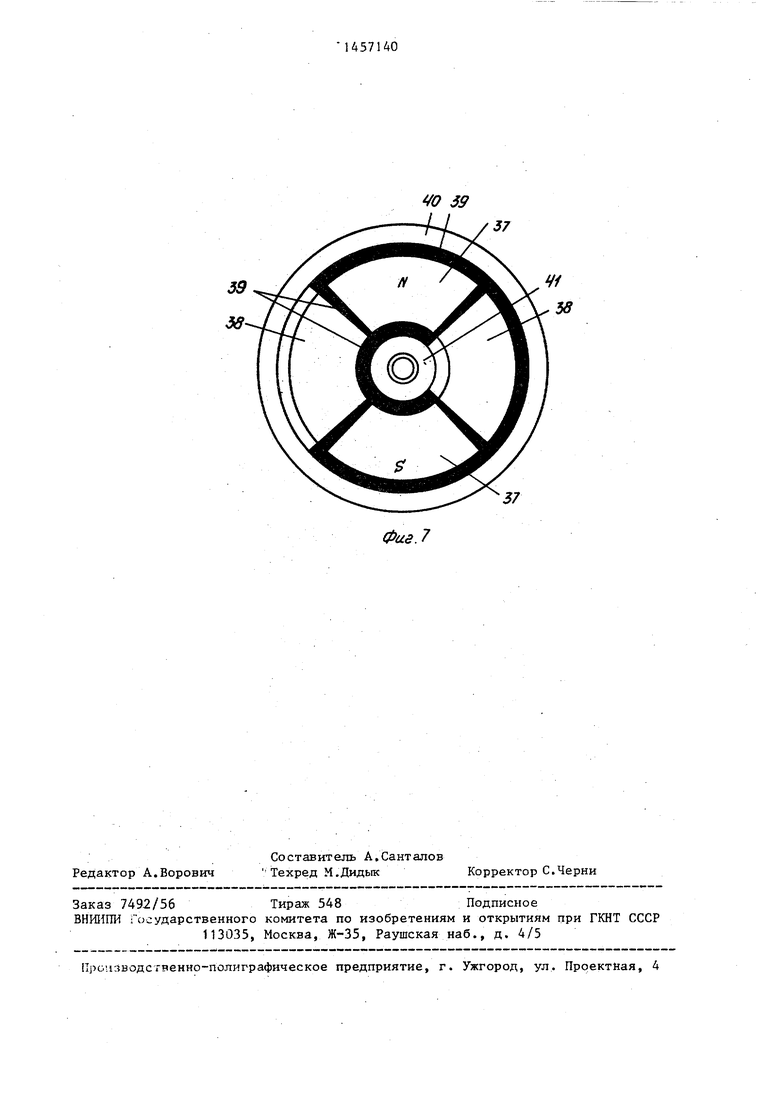
Генератор 1 и ЭЬШ 2 (фиг. 6 и 7) выполнены с комбинированным возбуждением, при этом якори генератора 1 и ЭМП содержат га,-фазный генератор 1 и
m -фазный электромеханический преоб- разователь 2, кольцевые обмотки 19 и 22, жестко закрепленные на тороидальном магнитопроводе 35, а индукторы 20 и 23 генератора 1 и ЭМП 2 расположены с двух торцовых сторон якоря и представляют собой два магни- топроводящих диска 36 с жестко за- 1крепленными на них полюсами с чередующейся полярностью, образованными встречно намагниченными постоянными магнитами 37 (фиг. 7) трапецеидальной ормы, между которыми на дисках 36 ротора жестко закреплены дополнительные полюса 38 из магнитомягкого материала, при этом полюса из магнито- мягкого и маг итотвердого материалов разделены между собой немагнитным материалом 39, (на фиг. 7 зачернен), магнитотвердые полюса не имеют магнитной связи с дополнительными наружными и внутренними кольцевыми магни- топроводами 40 и 41, жестко закрепленными на магнитопроводящих дисках 36 ротора, магнитомягкие полюса 38 имеют непосредственный магнитный контакт либо с наружным, либо с внутренним дополнительными кольцевыми магнитопроводами 40 и 41, диски 36 рото- 15 ет также лучшее использование меди ра по внутреннему диаметру заканчиваются магнитопроводящими втулками,, жестко закрепленными на немагнитопро- водящем валу 42, обеспечивая магнит- ньй контакт между двумя дисками 36 20 ротора, на наружной и внутренней поверхностях статора через немагнитные изолирующие втулки 43 и 44 закреплены наружная и внутренняя дополнительные поперечные обмотки возбуждения 25 генератора 1 или ЭМП 2, вьшолненные в виде наружной и внутренней кольцевых катушек 45 и 46, размещенных во внутреннем пространстве наружного и
за счет сокращения средней длины витка при возрастании его активной длины, так как используются обе активные стороны статора.
Конструктивное исполнение генератора и ЭМП дает возможность почти без ухудшения массогабаритных показателей получить бесконтактное управление суммарным потоком в машине как по величине, так и по фазе.
Использование дополнительной поперечной обмотки возбуждения для ком- 4 пенсации переменной составляющей проекции вектора основного потокосцеплевнутреннего П-образных кольцевых маг- 30 ния в генераторе и ЭМП не связано с нитопроводов 47 и 48, имеющих магнит- дополнительным потреблением реактивный контакт через торцовый зазор с наружным и внутренним дополнительными кольцевыми магнитопроводами 40 и 41, а наружньй П-образньй кольцевой магнитопровод 47 жестко закреплен через внешнюю немагнитную втулку 49 к корпусу 50.
К наружной поверхности одного из дисков 36, например правого, закреп- лен ротор 51 датчика углового положения, выполненного в виде бесконтактного синусно-косинусного вращающегося
трансформатора дискового типа с коль- 1. Автономная система электрообо- цевыми высокочастотными трансформато- 45 РУДования с вентильным электродвига- рами 52, статор 53 которого закреплен на внутренней торцовой поверхности подшипникового щита 54.
По сравнению с машинами традиционтелем, содержащая 2р -полюсный т,- фазный генератор переменного тока и вентильный электродвигатель, включающий в себя 2р2 -полюсный т -фазный
ного исполнения машины торцового типа QQ электромеханический преобразователь,
выгодно отличаются лучшим использованием активных материалов. Так, например, удельная мощность машины на единицу объема возрастает более чем в 2 раза в зависимости от полюсности машины, что приводит при фиксированной рабочей скорости к возрастанию такого важного параметра как момент. Возрастание момента в фиксированном
55
обмотки якорей которых связаны через преобразователь частоты, управлякщие цепи которого связаны с выходом управляющих импульсов системы управления, содержащей входы регулирования угла запаздывания и угла опережения и входы, связанные с вькодами датчиков углового положения ротора электромеханического преобразователя и ге
активном объеме машины приводит к увеличению жесткости механической характеристики ЛМ/Лп, что позволяет улучшить динамические возможности вентильного электродвигателя.
Кроме того, дисковое исполнение генератора и ЭМП приводит к улучшению компоновки установки благодаря малой осевой длине, к увеличению механической жесткости и к улучшению тепловых характеристик за счет лучшего охлаждения. Уменьшению тепловых загрузок генератора и ЭМП способствует также лучшее использование меди
за счет сокращения средней длины витка при возрастании его активной длины, так как используются обе активные стороны статора.
Конструктивное исполнение генератора и ЭМП дает возможность почти без ухудшения массогабаритных показателей получить бесконтактное управление суммарным потоком в машине как по величине, так и по фазе.
Использование дополнительной поперечной обмотки возбуждения для ком- 4 пенсации переменной составляющей проекции вектора основного потокосцепленой мощности, как это имеет место при решении аналогичной задачи с помощью дополнительной продольной обмотки возбуждения. Кроме того, наличие дополнительной поперечной обмотки возбуждения позволяет решать некоторые другие вопросы, например задачи, связанные с компенсацией реакции якоря в машине.
Формула изобретения
телем, содержащая 2р -полюсный т,- фазный генератор переменного тока и вентильный электродвигатель, включающий в себя 2р2 -полюсный т -фазный
электромеханический преобразователь,
обмотки якорей которых связаны через преобразователь частоты, управлякщие цепи которого связаны с выходом управляющих импульсов системы управления, содержащей входы регулирования угла запаздывания и угла опережения и входы, связанные с вькодами датчиков углового положения ротора электромеханического преобразователя и ге1314
нератора, m,-фазный датчик тока якоря генератора и т -фазный датчик тока якоря электромеханического преобразователя, отличающаяся тем, что, с целью уменьшения пульсаций вращакщего момента вентильного электродвигателя, улучшения энергетических, динамических, массогабарит- ных показателей и расширения диапазо- на регулирования частоты вращения, в нее дополнительно введены первое и второе вычислительные устройства, пропорционально-интегральные регуляторы, усилители тока и датчики тока дополнительных обмоток возбуждения генератора и электромеханического преобразователя, при этом электромеханический преобразователь и генера- тор вьшолнены с кольцевыми обмотками якоря, каждая фаза обмоток якорей электромеханического преобразователя и генератора выполнена из двух ветвей, расположенных одна относительно другой со сдвигом на угол , у генератора и ТГ/р у электромеханического преобразователя и соединенных между собой своими разноименными выводами, индуктор генератора снабжен полюсами с дополнительной обмоткой возбуждения, расположенными относительно полюсов индуктора генератора на угол 1Г/2р, дополнительная обмотка возбуждения генератора соединена зажимами с выходными .зажимами усилителя тока дополнительной обмотки возбуждения генератора, входом соединенного с выходом регулятора тока дополнительной обмотки возбзлждения генератора, первый вход которого под- ключей к выходу первого вычислительного устройства, второй вход - к выходу датчика тока дополнительной обмотки возбуждения генератора и к одному из входов первого вычислитель- ного устройства, другие входы которо- .го подключены к выходу датчика сигналов углового положения ротора генератора, системы управления и датчика тока якоря генератора, индуктор элек- тромеханического преобразова-геля снабжен полюсами с дополнительной обмоткой возбуждения, расположенными относительно полюсов индуктора электромеханического преобразователя на угол it /Zp, дополнительная обмотка возбуждения электромеханического преобразователя соединена зажимакш с выходными зажимами усилителя тока до
5 о о g g
5
401
полнительной обмотки возбуждения электромеханического преобразователя, входом соединенного с выходом регулятора тока дополнительной обмотки возбуждения электромеханического преобразователя, первый вход которого подключен к выходу второго вычислительного устройства, второй вход - к выходу датчика тока дополнительной обмотки возбуждения электромеханического преобразователя и к одному из входов второго вычислительного устройства, другие входы которого подключены к выходу сигналов углового положения ротора электромеханического преобразователя системы управления и датчику тока якоря электромеханического преобразователя, причем первое вычислительное устройство выполнено с возможностью формирования выходного сигнала по сигналам датчика тока обмотки якоря генератора, датчика тока дополнительной обмотки возбуждения генератора, датчика углового положения ротора генератора - В соответствии с выражением
г Л95 г/з1пГ,
где йУл - проекция переменной составляющей основного пото- косцепления генератора на ось , ортогональную направлению вектора тока якоря генератора; угол между продольной
осью d и осью г генератора,
второе вычислительное устройство выполнено с возможностью формирования выходного сигнала по сигналам датчика тока обмотки якоря электромеханического преобразователя,датчика тока дополнительной обмотки возбуждения электромеханического преобразователя и датчика углового положения ротора электромеханического преобразователя в соответствии с выражением
Л
где проекция переменной составляющей основного пото- косцепления на ось .б д , ортогональную направлению вектора тока якоря электромеханического преобразователя;
, - угол между продольной А , (ОСЬЮ Од и осью Сд элект1 5
ромеханического преобразователя,
I4
значения, блок суммирования, блок материала, при этом полюса из магниления, вход делимого которого подключен к выходу блока суммирования, первым входом соединенного с выходом блока вьщеления среднего значения, вход Kotoporo соединен с вторым входом блока суммирования и с выходом второго координатного преобразователя, первый и второй входы которого соединены с первым и вторым выходами блока формирования потокосцеплений якоря, первым и вторым входами соединенного с первьм и вторым выходами первого координатного преобразователя, третьим входом - с выходом датчика тока дополнительной обмотки воз- 25 ленными на немагнитном валу, обеспе
буждения, четвертым входом - с эквивалентным сигналом поля возбуждения по продольной оси, при этом вход делителя блока деления, четвертый вход второго координатного преобразовате- ля и рторой вход первого координатного преобразователя связаны с вторым выходом сигнала углового положения joTopa генератора или электромеханического преобразователя системы управления, третий вход второго координатного преобразовател-я, первый вход первого координатного преобразователя связаны с первым выходом сигнала углового положения ротора гене- ратора или электромеханического преобразователя системы управления, другие входы первого координатного преобразователя соединены с выходами датчика тока якоря.
у генератора и т,; -фазной у электронеханического преобразователя кольцевой обмотки, жестко закрепленной на тороидальном магнитопроводе, а индуктор расположен с двух торцовых сторон
71AO16
якоря и содержит два магнитопроводящих диска с жестко закрепленными на них полюсами с чередунлцейся полярностью, образованными встречно намагниченными постоянными магнитами трапецеидальной формы, между которыми на дисках ротора жестко закреплены дополнительные полюса из магнитомягкого
томягкоГо и магнитотвердого материалов разделены немагнитным промежутком, магнитотвердые полюса отделены немагнитным промежутком от дополнительньк наружных и внутренних кольцевых магнитопроводов, жестко закрепленных на магнитопроводящих дисках ротора, магнитомягкие полюса имеют непосредственный магнитньй контакт
либо с наружным, либо с внутренним дополнительными кольцевыми магнито- проводами, диски ротора по внутреннему диаметру заканчиваются магнито- проводящими втулками, жестко закреп
чивая магнитный контакт между двумя дисками ротора, на наружной и внутренней поверхностях статора через немагнитные изолирующие втулки закреплены наружная и внутренняя дополнительные поперечные обмотки возбуждения , выполненные в виде наружной и внутренней кольцевых катушек, размещенных во внутреннем пространстве наружного и внутреннего П-образных кольцевых магнитопроводов, имеющих магнитный контакт через торцовый зазор с наружным и внутренним дополнительными кольцевыми магнитопроводами, а наружный П-образный кольцевой маг- нитопровод жестко прикреплен через внешнюю немагнитную втулку к корпусу.
Фм2
Г
25
17
26
tc
Aif-9
19 Hr- V tfg
COST
StnT
Q(iO)
I
АУУ/
50 V9
59
Фие.
Фа9,6
4t 59
37
37
Фаз.7
| Вентильные двигатели и их применение на электроподвижном составе./ /Под ред | |||
| Б.Н | |||
| Тихменева | |||
| - М.: Транспорт, 1976, с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Автономная система электрооборудования с вентильным электродвигателем | 1985 |
|
SU1356134A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
