Изобретение относится к магнитометрии и может использоваться для автоматического измерения с высокой точностью индукции магнитных полей в широком диапазоне значений.
В магнитометрии широко используются измерители магнитной индукции, основанные на эффекте Холла, благодаря достаточно высокой надежности и удобству в эксплуатации. Вместе с тем точность измерения в таких магнитометрах невысока, что объясняется нелинейностью характеристики преобразователя Холла (ПХ), нестабильностью тока питания ПХ, зависимостью результата измерения от смещения нуля первичного и вторичных преобразователей и нестабильностью коэффициентов передачи вторичных преобразователей (под вторичными преобразователями имеют в виду
элементы тракта передачи напряжения Холла, начиная с выхода ПХ).
Известны измерители магнитной индукции 1, 2, 3, в которых применялись способы уменьшения влияния указанных выше отрицательных факторов, основанные либо на изменении сопротивления в цепи питания ПХ, либо на изменении величины компенсационного напряжения. Эти способы не дали существенных результатов, так как были рассчитаны на использование ключевых элементов в измерительной цепи и большого числа вспомогательных элементов, которые сами по себе являлись источниками дополнительных погрешностей измерений. Более эффективными с точки зрения снижения влияния дестабилизирующих факторов является измеритель магнитной индукции 4 (прототип). Он содержит ПХ, управляемый усилитель, детектор абсоVJ
О
g
00
ю
лютного уровня, аналого-цифровой преобразователь (АЦП), функциональный преобразователь, блок индикации, преобразователь ток-напряжение, автоматический переключатель диапазонов, управляемый источник опорного напряжения АЦП, источник питания ПХ, дискриминатор полярности . Введение преобразователя ток-напряжение устранило погрешность из-за нестабильности источника питания ПХ, а введение функционального преобразователя позволило корректировать нелинейность характеристик ПХ.
Однако измеритель магнитной индукции 4 имеет, наряду с некоторыми преимуществами по сравнению с аналогами 1, 2, 3, следующие принципиальные недостатки.
Не учитывается характер зависимости напряжения Холла от значений индукции магнитного поля, которая является нелинейной и немонотонной, имея точки перегиба. Поэтому интерполяция значений индукции по двум точкам явно недостаточна и сильно ограничивает точность измерений.
Результаты измерений магнитной индукции зависят от смещения нуля самого ПХ (проверяется в нулевом магнитном поле, т. е, когда ПХ устанавливается вне магнита).
Результаты измерений магнитной индукции зависят от смещений нуля вторичных преобразователей.
Результаты измерений зависят от нестабильности коэффициентов передёчи вторичных преобразователей.
Целью изобретения является повышение точности измерений.
Цель достигается тем, что в цифровой автоматический измеритель магнитной индукции, содержащий ПХ, преобразователь ток-напряжение, источник питания ПХ, управляемый усилитель, детектор абсолютного уровня, дискриминатор полярности, АЦП, блок индикации, причем первый выход источника питания ПХ соединен с входом преобразователя ток-напряжение, первый выход которого связан с первым входом ПХ, выход управляемого усилитепя соединен с входами детектора абсолютного уровня и дискриминатора полярности, выход детектора абсолютного уровня связан с информа- ционным входом АЦП, введены блок коммутации, управляемый делитель напряжения и блок управления и обработки цифровой информации, при этом второй выход источника питания ПХ связан с вторым входом ПХ, выход которого соединен с первым входом блока коммутации, второй вход которого соединен шиной с первым выходом блока управления и обработки цифровой
информации, а третий вход - с выходом управляемого делителя напряжения, выход блока коммутации соединен с информационным входом управляемого усилителя, управляющий вход которого соединен шиной с вторым выходом блока управления и обработки цифровой информации и с первым входом управляемого делителя напряжения, второй вход которого соединен с вто0 рым выходом преобразователя ток-напряжение и с входом опорного напряжения АЦП, выход дискриминатора полярности соединен с первым входом блока управления и обработки цифровой инфор5 мации, второй вход которого соединен шиной с выходом АЦП. третий и четвертый выходы блока управления и обработки цифровой информации соединены шинами соответственно с первым и вторым входами
0 блока индикации.
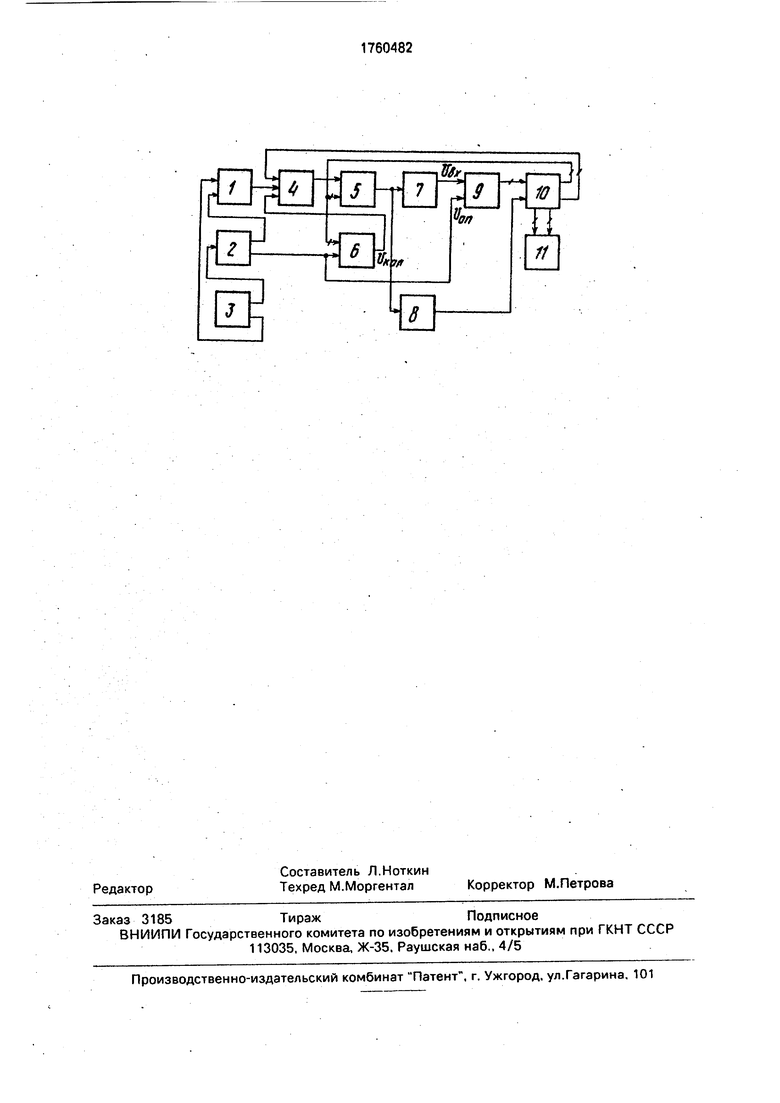
На чертеже представлена структурная электрическая схема предложенного цифрового автоматического измерителя магнитной индукции.
5Он содержит ПХ 1, преобразователь 2
ток-напряжение, источник 3 питания ПХ, блок 4 коммутации, управляемый усилитель 5, управляемый делитель 6 напряжения, детектор 7 абсолютного уровня, дискримина0 тор 8 полярности, АЦП 9, блок 10 управления и обработки цифровой информации (БУОЦИ), блок 11 индикации. На чертеже приняты обозначения: UBX и Uon - входное и опорное напряже5 ния АЦП соответственно:
Укал - калибровочное напряжение. Цифровой автоматический измеритель магнитной индукции работает следующим образом.
0 ПХ 1 помещают в измеряемое магнитное поле. Его выходной сигнал, уровень которого пропорционален величине измеряемой магнитной индукции, поступает через блок 4 и усилитель 5 на входы дис5 криминатора 8 и детектора 7, который предназначен для устранения зависимости знака и величины выходного сигнала ПХ от направления измеряемого магнитного поля. Детектор 7 изменяет знак коэффициента
0 передачи при изменении полярности входного сигнала, сохраняя полярность выходного сигнала неизменной. Изменение чувствительности ПХ при изменении направления магнитного поля компенсирует5 ся соответствующей регулировкой в детекторе 7, при помощи которой коэффициент передачи для выходного напряжения ПХ отрицательной полярности устанавливается большим или меньшим единицы. При этом коэффициент передачи для напряжения положительной полярности принимается равным единице. Дискриминатор 8 выдает на БУОЦИ 10 напряжение лог. О или лог. 1 в зависимости от знака выходного сигнала ПХ, что необходимо для работы БУОЦИ 10 и для вывода этого знака на блок 11, С выхода детектора 7 преобразованное напряжение ПХ поступает на информационный вход АЦП 9, в котором производится сравнение этого напряжения с опорным, поступающим на соответствующий вход АЦП из преобразователя 2. В результате этого в АЦП вырабатывается цифровой код. Этот код определяется отношением N входного и опорного напряжений, поступающих на соответствующие входы АЦП 9, т. е.
М -У S K1 J В S Kl B
UonK2 JКг
где S - магнитная чувствительность ПХ;
J - ток возбуждения ПХ;
Ki -коэффициент передачи усилителя 5:
Кг - коэффициент преобразования преобразователя 2;
В - измеряемая магнитная индукция.
Благодаря использованию в качестве опорного для АЦП напряжения, получаемого за счет тока возбуждения ПХ, устранено влияние изменений этого тока (J) на результаты измерения магнитной индукции.
Преобразователь 2 (его коэффициент преобразования Кг) преобразует достаточно большой ток (порядка 100 мА)в напряжение, причем стабильность преобразования обеспечивается только выбором стабильных регистров. На информационный вход усилителя 5 (его коэффициент передачи Ki) поступает напряжение малого уровня (порядка десятков микровольт). Поэтому необходимо исключить возможные изменения Ki в усилителе 5. ПХ, имеющий магнитную чув- ствительность S, является первичным преобразователем. За счет смещения в нем нуля также вносится погрешность в результат измерения величины В. Наконец, первичный преобразователь, как отмечалось, имеет нелинейную и немонотонную зависимость уровня выходного сигнала от величины измеряемой индукции Unx(B), что вносит существенную погрешность в результат измерения величины В. При этом интерполяция по двум точкам кривой, как это было в прототипе, явно недостаточна для выполнения высокоточных измерений. Устранение влияния упомянутых дестабилизирующих факторов на результаты изме- рений магнитной индукции осуществляется следующим образом.
Калибровка коэффициента передачи Ki усилителя 5 производится путем подачи калибровочного напряжения Укал от делителя 6 через блок 4 на информационный вход усилителя 5. Блок 4 переключается при воздействии на его вход сигнала (БУОЦИ) 10. В БУОЦИ сравнивается калибровочное значение индукции Вкал с образцовым числом Вко, записанным в память БУОЦИ. Отношение Вко/Вкал составляет поправочный множитель Р. Вычисление Р производится на каждом поддиапазоне работы магнитометра.
Для устранения влияния смещения нуля вторичных преобразователей вход усилителя 5 соединяется с общей шиной измерителя магнитной индукции через блок 4, управляемый сигналом БУОЦИ. При этом код на выходе АЦП характеризует смещение нуля С вторичных преобразователей. Знак, с которым необходимо учесть смещение нуля С, определяется при помощи логического сигнала, поступающего от дискриминатора 8 на вход БУОЦИ.
Нелинейность и немонотонность характеристики ПХ учитывается при помощи коэффициента Ки. Он отражает отношение показаний предложенного и эталонного магнитометров при измерении индукции одного и того же магнитного поля. Измерения Ки производятся при изготовлении магнитометра для заданного числа значений индукции. Смещение нуля ПХ 1 исключается следующим образом. Перед началом работы измерителя ПХ извлекается из магнитного поля и по блоку 11 отмечается значение магнитной индукции с учетом ошибок С и Р. Полученное ненулевое значение индукции ВСх отражает смещение нуля ПХ, которое обозначается через СХ.
Таким образом, в ОЗУ БУОЦИ записаны коды чисел С, Р, СХ, в ПЗУ - коэффициент Ки. После измерения индукции магнитного поля и ее коррекции при помощи коэффициентов С, Р и СХ в БУОЦИ осуществляется сравнение полученного значения В со значениями Ви, при которых проводилось определение коэффициента коррекции Ки. Определяется наиболее близкое значение Ви и соответствующий ему коэффициент коррекции К. Результат измерения умножается на Ки и получается значение магнитной индукции, максимально приближенное к истинному значению.
Полученное в БУОЦИ окончательное значение В в виде цифрового кода поступает в блок 11, построенный по принципу динамической индикации. Работа БУОЦИ осуществляется по программе, записанной в его ПЗУ. Применение в БУОЦИ микропроцессорной системы позволяет производить автоматический выбор поддиапазона измерений, считывание данных с АЦП, их промежуточное хранение и коррекцию с помощью коэффициентов С.Р.СХ и Ки. представление результата измерений в удобной форме и вывод его на индикацию посредством элементарных операций с высокой производительностью. Помимо того, применение в БУОЦИ микропроцессорной системы и универсальных БИС передачи параллельной информации придает такие дополнительные возможности, как вычисление магнитной индукции относительно заданной величины (в абсолютных и относительных единицах), любые арифметические операции, проведение разбраковки магнитов и магнитометров других типов по принципу допускового контроля, что значительно расширяет область применения магнитометров.
Погрешность измерения магнитной индукции при помощи предложенного измерителя определяется только точностью АЦП и количеством точек интерполяции характеристики ПХ. Анализ типовой характеристики ПХ показывает, что, применяя 12-разрядный АЦП, можно получить погрешность измерения магнитной индукции 5В« 0,01 %, используя всего 10-20 точек интерполяции. При повышении разрядности АЦП или увеличении числа точек интерполяции погрешность д В может быть снижена.
В предложенном магнитометре с эффектом Холла достигнута прецизионная точность измерения магнитной индукции, которой обладает дорогостоящий и слабо помехозащищенный магнитометр на основе ядерного магнитного резонанса. Помимо того, предложенный магнитометр обеспечивает автоматизацию измерений, эксплуатацию в труднодоступных условиях, высокую надежность и широкие функциональные возможности.
Формула изобретения
Цифровой автоматический измеритель магнитной индукции, содержащий преобразователь Холла, преобразователь ток-напряжение, источник питания преобразователя Холла, управляемый усилитель, детектор абсолютного уровня, дискриминатор полярности, аналого-цифровой преобразователь, блок индикации, при этом
первый выход источника питания преобразователя Холла соединен с входом преобразователя ток-напряжение, первый выход которого связан с первым входом преобразователя Холла, выход управляемого усилителя соединен с входами детектора абсолютного уровня и дискриминатора полярности, выход детектора абсолютного уровня связан с информационным входом аналого-цифрового преобразователя, о тличающийся тем, что. с целью повышения точности измерений, в него введены блок коммутации, управляемый делитель напряжения и блок управления и обработки цифровой информации, причем
второй выход источника питания преобразователя Холла связан с вторым входом пре- образователя Холла, выход которого соединен с первым входом блока коммутации, второй вход которого соединен шиной
с первым выходом блока управления и обработки цифровой информации, а третий вход - с выходом управляемого делителя напряжения, выход блока коммутации соединен с информационным входом управляемого
усилителя, управляющий вход которого соединен шиной с вторым выходом блока управления и обработки цифровой информации и с первым входом управляемого делителя напряжения, второй вход которого соединен с вторым выходом преобразователя ток-напряжение и с входом опорного напряжения аналого- цифрового преобразователя, выход дискриминатора полярности соединен
с первым входом блока управления и обработки цифровой информации, второй вход которого соединен шиной с выходом аналого-цифрового преобразователя, третий и четвертый выходы блока управления и обработки цифровой информации соединены шинами соответственно с первым и вторым входами блока индикации.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой автоматический измеритель магнитной индукции постоянного магнитного поля | 1984 |
|
SU1308960A1 |
| Контроллер магнитного поля | 2023 |
|
RU2799103C1 |
| Устройство для измерения напряжения постоянного тока | 1981 |
|
SU1068826A1 |
| Измеритель электродвижущей силы Холла | 1985 |
|
SU1307412A2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАГНИТНОГО ПОЛЯ | 2013 |
|
RU2534424C1 |
| Электромагнитный расходомер | 1991 |
|
SU1830135A3 |
| Измеритель индукции постоянного магнитного поля на эффекте Холла (варианты) | 2022 |
|
RU2782984C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 1997 |
|
RU2124737C1 |
| Цифровой измеритель магнитной индукции | 1976 |
|
SU879519A1 |
| УСТРОЙСТВО КОНТРОЛЯ РАБОТОСПОСОБНОСТИ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2013 |
|
RU2526500C1 |
Изобретение относится к приборам для магнитных измерений и предназначено для автоматического прецизионного измерения индукции магнитных полей в широком диапазоне значений. Сущность изобретения: измеритель содержит преобразователь 1 Холла, преобразователь 2 ток-напряжение, источник 3 питания преобразователя Холла, блок 4 коммутации, управляемый усилитель 5, управляемый делитель 6 напряжения, детектор 7 абсолютного уровня, дискриминатор 8 полярности, аналого-цифровой преобразователь 9, блок 10 управления, блок 11 индикации. Особенностью изобретения является введение блока коммутации, управляемого делителя напряжения и блока управления и обработки цифровой информации. 1 ил. ел С
| Устройство для измерения магнитного поля | 1971 |
|
SU458791A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения магнитного поля | 1977 |
|
SU672571A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения магнитной индукции постоянного магнитного поля | 1981 |
|
SU954907A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Цифровой автоматический измеритель магнитной индукции постоянного магнитного поля | 1984 |
|
SU1308960A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
